 夜雨聆风
夜雨聆风猎聘2024年Q3数据:掌握机器人抓取技术的嵌入式开发者,薪资溢价43%,简历回复率是普通岗位的2.7倍。
当你还在调试GPIO翻转时,Open Claw生态已让成千上万开发者进入具身智能底层架构。
这不是未来,是正在发生的职业分化。
Open Claw是典型机电一体化系统,覆盖嵌入式开发全层级:
┌──────────────────┐
│ 应用层:ROS 2 / MoveIt / 上位机GUI │
├──────────────────┤
│ 算法层:抓取规划 / 力控策略 / 视觉伺服│
├──────────────────┤
│ 系统层:ros2_control / 通信中间件 │ ← 嵌入式核心价值
├──────────────────┤
│ 固件层:FreeRTOS / 实时控制 / 驱动 │ ← 性能天花板
├──────────────────┤
│ 硬件层:STM32 / 传感器 / 执行机构 │ ← 易被低估的基石
└──────────────────┘
关键洞察:传统嵌入式停留在"功能实现",机器人嵌入式需要"系统级优化"——实时性、可靠性、多模态融合。
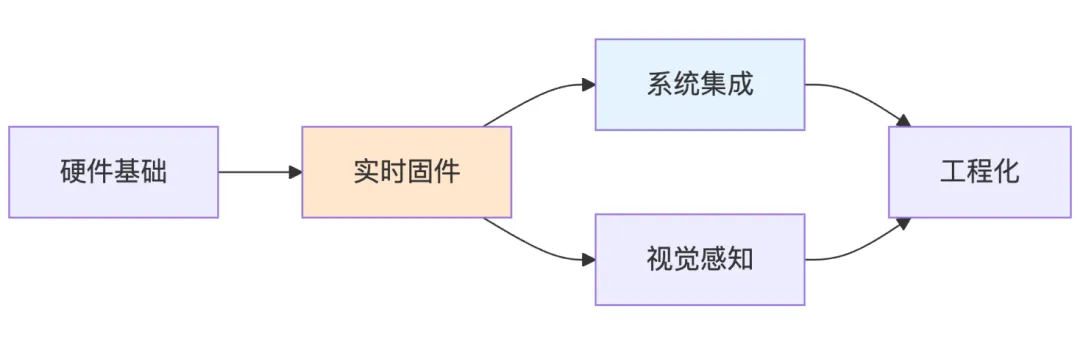
基于MECE原则,按依赖关系设计:
阶段 | 模块 | 核心目标 | 周期 |
一 | 硬件基础 | 独立绘制控制板原理图,驱动舵机完成正弦轨迹跟踪 | 4周 |
二 | 实时固件 | 实现100Hz稳定控制,位置-力混合控制策略 | 6周 |
三 | 视觉感知 | 相机标定、手眼标定、±1mm精度视觉定位 | 4周 |
四 | 系统集成 | ROS 2与真实硬件闭环,MoveIt轨迹规划 | 4周 |
五 | 工程化 | 建立可复用项目模板,CI/CD与文档规范 | 2周 |
关键路径依赖
混合控制策略是阶段二的核心难点:在位置控制模式下采用增量式PID,力控制模式下采用阻抗控制,通过调节虚拟刚度系数和阻尼系数,实现对脆弱物体的自适应抓取。
系统层价值体现在:将算法工程师的Python代码转化为确定性实时控制,成为感知层与执行层之间的关键桥梁。
层级 | 项目名称 | 技术要点 | 验证能力 | 求职价值 |
初级 | 基础控制单元 | ESP32 Wi-Fi接入、双闭环控制、数据日志 | M1+M2 | 嵌入式基本功 |
中级 | 视觉伺服抓取 | YOLO-tiny目标检测、ROS 2闭环、手眼标定 | M3+M4 | 系统级能力 |
高级 | 工业级分拣单元 | CAN总线多轴协同、EtherCAT、OPC UA对接MES | 全栈 | 对标30-45万岗位 |
中级项目关键对比
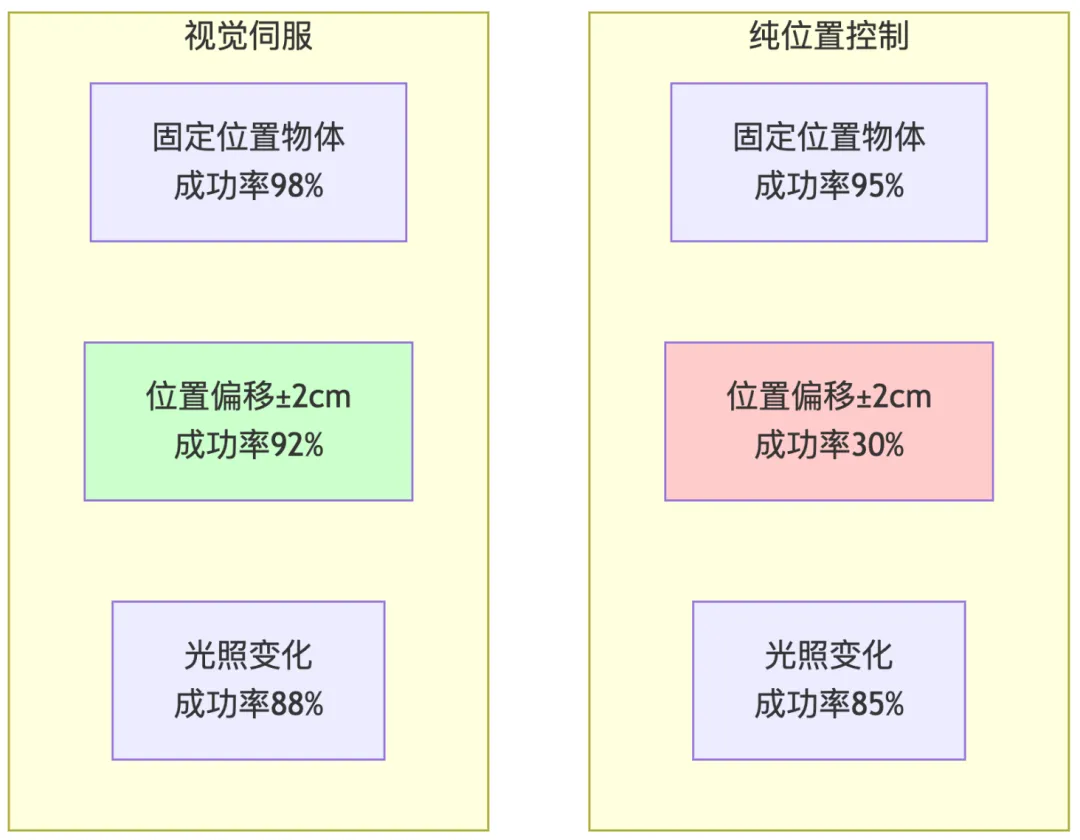
核心差异:视觉伺服在位置偏移场景下成功率提升3倍,这正是机器人非结构化环境应用的关键价值。
目标企业分类
类型 | 代表公司 | 技术侧重 | 薪资区间(3-5年) |
机器人本体厂商 | 优必选、大疆、九号 | 运动控制、机电一体化 | 35-50万 |
自动化集成商 | 新松、埃斯顿、汇川 | 工业通信、系统集成 | 30-45万 |
互联网/AI公司 | 百度Apollo、阿里达摩院 | 感知算法、深度学习部署 | 40-60万 |
机器人初创企业 | 众多A/B轮公司 | 全栈能力、快速迭代 | 25-40万+期权 |
面试必考点
实时系统
任务优先级如何设计?如何避免优先级反转?
中断响应时间如何测量与优化?FreeRTOS内存管理策略?
控制理论
PID各参数对系统的影响:Kp增大→响应快但超调大
位置控制与力控制的切换策略:阻抗控制的应用场景
项目深挖
"遇到的最大技术挑战?"→ 准备有数据支撑的故事
"如何保证代码质量?"→ 单元测试覆盖率、静态检查工具
"团队协作中的冲突?"→ 技术方案争论,如何用事实说服
薪资谈判话术模板
场景一:HR压价
"我调研了贵司同岗位市场薪资,基于我的项目经验——将抓取效率提升30%、视觉伺服成功率提升3倍,期望薪资是XX万。也看重技术成长空间,能否了解团队培训投入?"
场景二:谈期权
"我对公司方向非常认可,愿意在现金部分有一定弹性。能否介绍期权的成熟机制,以及最近一轮估值和行权价?"
场景三:对比多Offer
"目前我有另一个Offer在走流程,薪资略高但技术栈不太匹配。我更倾向于贵司的方向,能否在总包上再争取一下?"
天数 | 行动项 | 产出物 |
Day 1-2 | 采购Open Claw套件(Robotis Dynamixel或DIY方案) | 硬件清单确认 |
Day 3-4 | 搭建STM32开发环境,跑通LED+按键 | 首个可运行工程 |
Day 5-6 | 驱动单个舵机,实现角度开环控制 | 示波器验证PWM波形 |
Day 7 | 撰写学习笔记,发布技术博客/GitHub | 公开作品集起步 |
结语
机器人时代不会等待犹豫者。
技术升级的本质不是追逐热点,而是构建适应多技术周期的底层能力体系:
硬件设计能力 → 无论控制器怎么变,电源、信号完整性永恒
实时系统思维 → 从"功能正确"到"时间确定"的跃迁
系统集成视野 → 成为算法与硬件之间的"翻译官"
现在,就是定义自己职业未来的最佳时刻。
