 夜雨聆风
夜雨聆风写在前面
Tip 1 : QClaw是对OpenClaw的包装,本来一个完全打开的随意控制的OpenClaw,被QClaw包装之后变成了(QClaw这个“一体机”里面的)一个核心组件了。就像发动机(Openclaw)和汽车(QClaw)的区别。如果只是一般开开车的用户,不需要理解这个区别,直接用QClaw。如果是需要彻底驾驭有改发动机的需求的用户,还是需要进一步了解这个里面的封装机制,启动顺序,配置文件等等。
QClaw剥壳
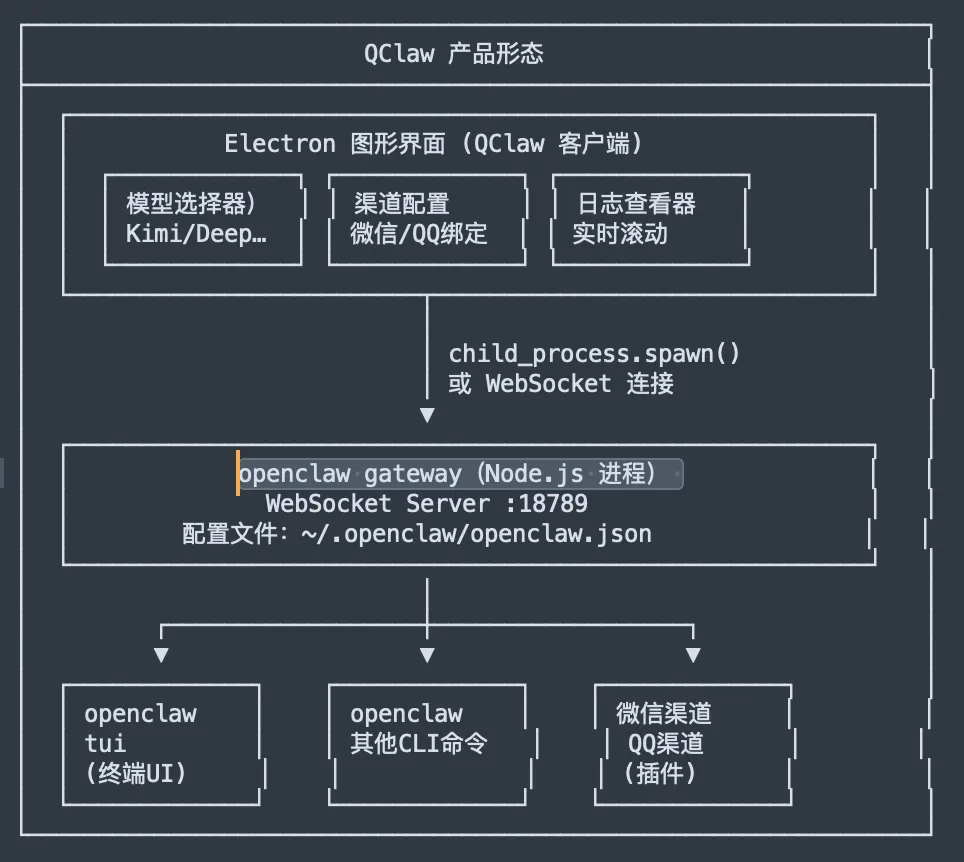
QClaw是怎么封装的Openclaw呢?下面说的很简单,但是还是要Hats off to鹅厂工程师的,体验比Openclaw好很多,能够封装的如此顺畅不得不佩服。简单讲一句话,通过Electron框架,把Openclaw(一个后台运行的不可见的程序/进程)包装成了一个前台用户用户能访问的界面,而在框架内部,则会自动转发用户需求,调用Openclaw。
当然,用过Openclaw的人,肯定也知道Openclaw自带了界面访问方式,浏览器(http://127.0.0.1:18789) / TUI等。本质上和通过QClaw的界面 -> Openclaw后台进程,没有区别,都是调用Openclaw gateway来和Openclaw能力的。所以从这一点上来看,大家都是套壳/包装Openclaw的能力。个人觉得QClaw封装的更加丝滑,屏蔽了很多细节,这样更适合普通用户使用。毕竟Openclaw真正带来的(或者后面的方向)是智能体平权,如果安装/使用/体验就让很多用望而生畏,那么后面能力再强也很难普及。下面这张图凑活着看,只要知道后面都是调用原装的openclaw gateway来做事情的就好了,上面只是套了个壳。
关键不同
养龙虾,Openclaw系列,主要有三个核心组件:模型是大脑;配置文件(各种MD)是协助与模型交互提供更多的信息,暂且叫做对话增强;技能是实际的能力,理解成工具也可以。用户告诉模型要做什么,配置文件协助模型更好的地理解用户意图,模型知道了意图就会调用相应的技能执行用户想要的操作。那QClaw和Openclaw在这三点上有什么不同呢:
大语言模型选择:
这个很好理解,大语言模型是整个体系的大脑,用户的所有的问题/需求都需要经过大模型解析/意图识别/任务生成。Openclaw也支持各种大模型的对接。这块不需要赘述。
对话增强:
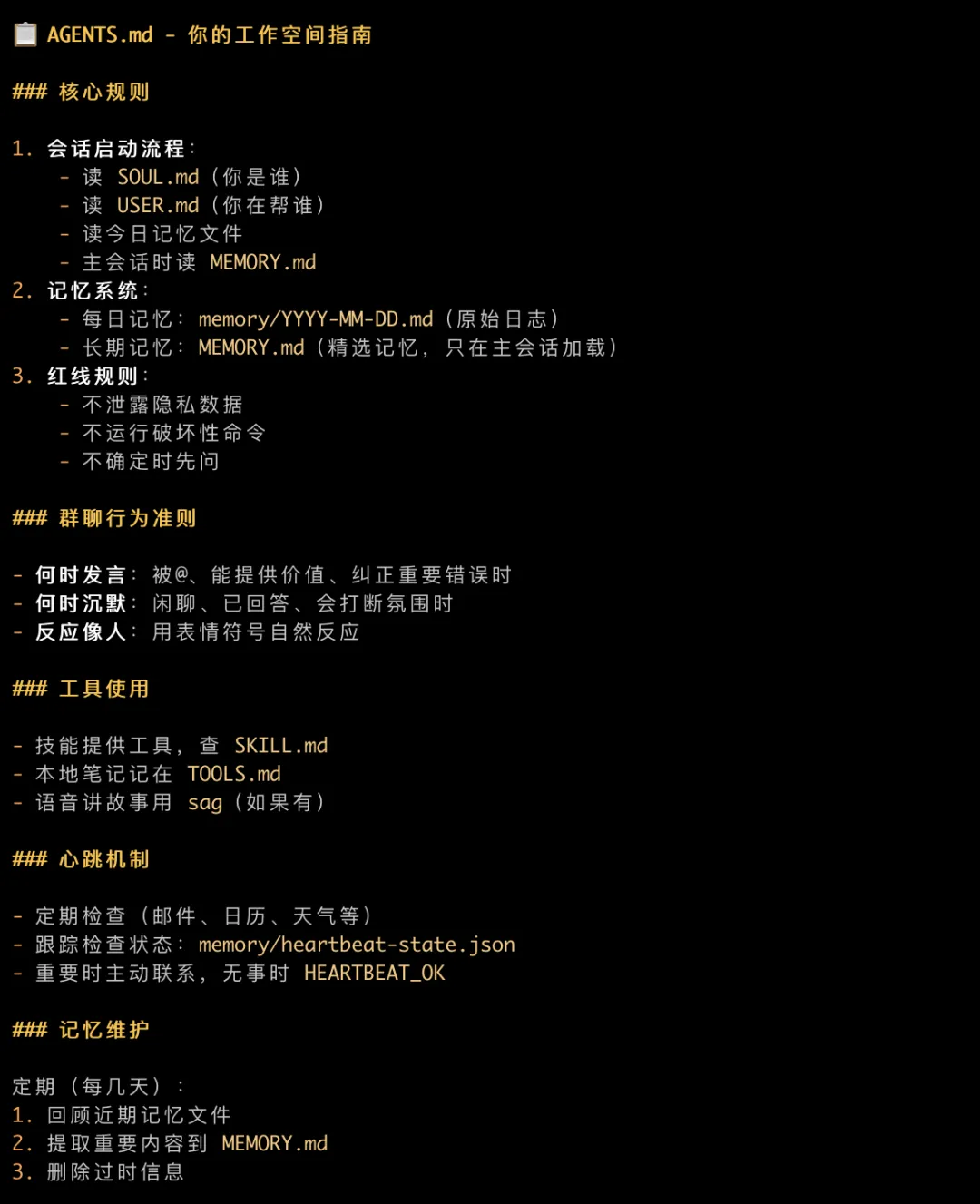
各种md文件(agents.md/soul.md/identify甚至是记忆), 在我看来和提示词没有区别(关于提示词/记忆等等,参照大语言模型 - 应用增强)。这些都是为了让你“每次”和大模型对话的时候,大模型更加理解你的意图。如果要说有区别,提示词工程是你在问问题的时候每次提供足够的信息在你问题里面(每次问问题都手写这些信息),而这些文件的作用是
举个例子,这里是我本地agents.md的内容,完全是纯文本文件,没有任何编码。当我问大模型问题的时候,这个文件里面的内容就会被带上。当然其他的记忆,Soul.md等等也都会被带上。
那么问题来了,为什么Openclaw一直被人说耗费token,通常你问题本身是消耗不了多少Token的,可以忽略不计,但是Openclaw会带上很多的其他信息,就是这些md文件,文件越大消费的token自然越多。但这个是一个悖论,你如果想让模型回复的更加精准,肯定在问问题的时候要提供更多的信息的,这不是Openclaw的问题,又想回复精准,又想不说清楚问题,这是不可能的。先不用争论,一些调优/压缩的方式。那些方式也只是优化,并未解决这种根本问题。
回到正题QClaw和Openclaw的对话增强有什么不同呢,答案是没有不同,一样的机制,只不过这些文件的存储位置不一样。
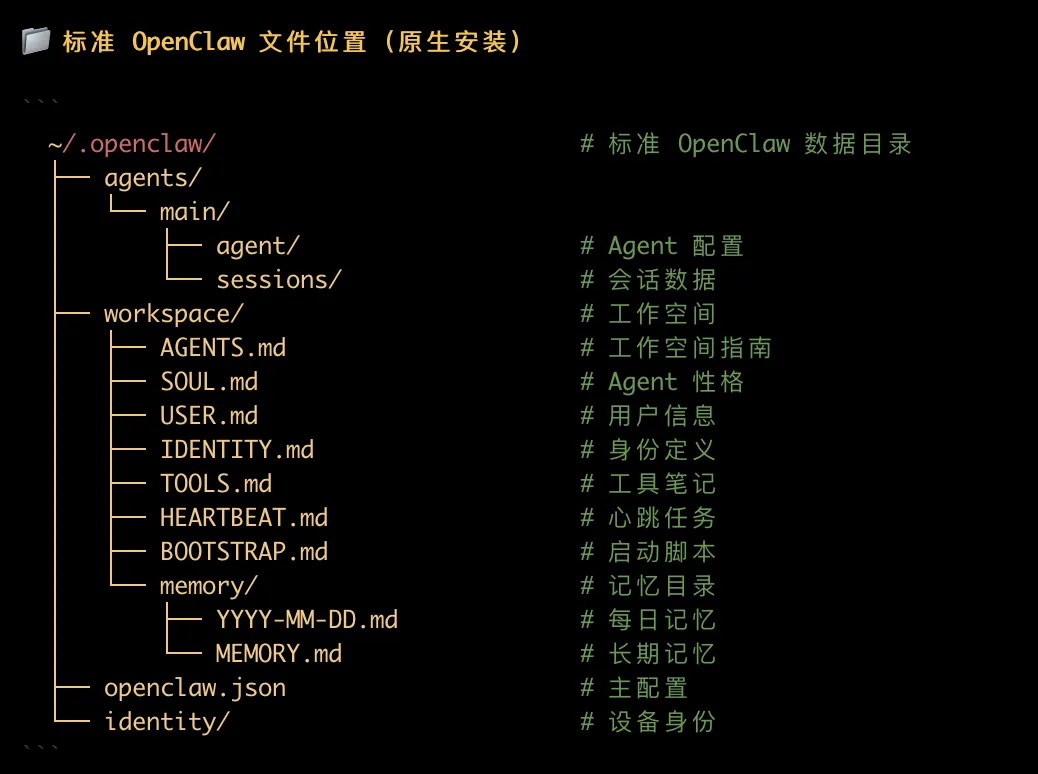 | 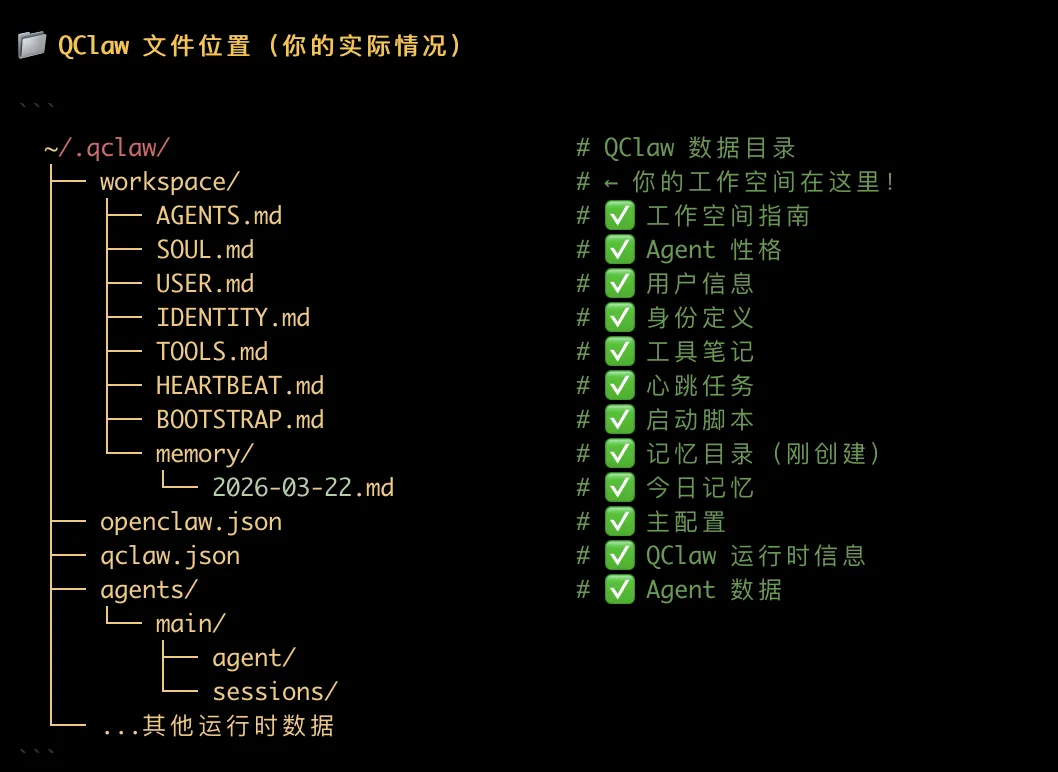 |
在QClaw环境下,当你有需要的时候只需要更改第二个图里面的这些文件。QClaw会自行加载这个路径下的文件的(而不是内置的Openclaw的配置。另外,在QClaw环境下,基本可以认为~/.openclaw是没用的 - 对于用户,里面只是记录一些设备信息。)
技能安装:
不知道技能是什么,先去参照Openclaw入门;本质上QClaw既然是封装的Openclaw,那么在技能开发和使用上并没有本质区别。唯一的区别是在路径配置上(不论是技能的查找还是技能的安装都只是路径上的不同)
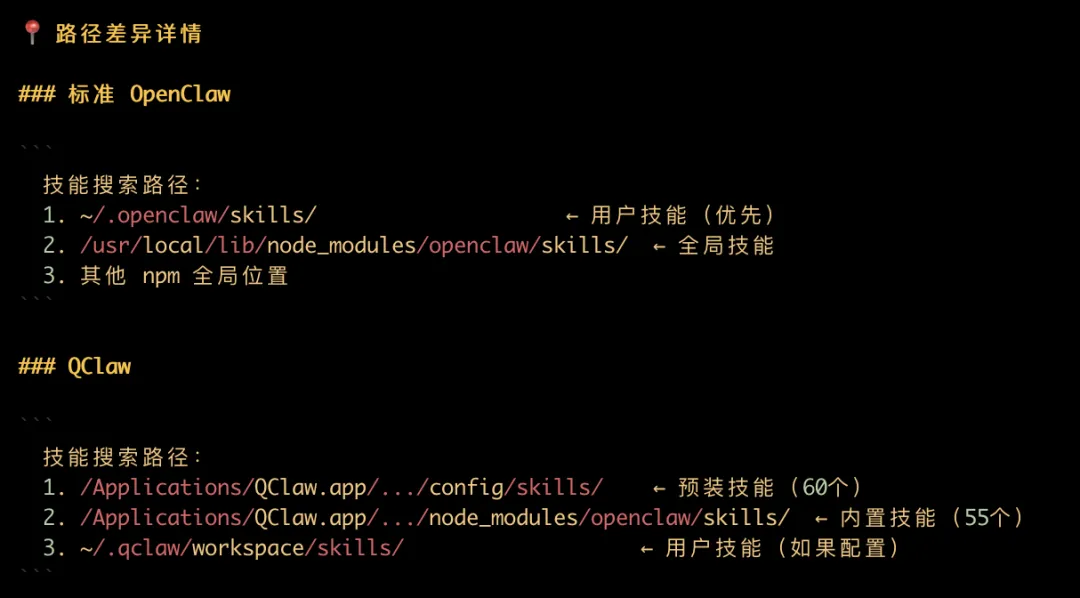
简单解释下,Openclaw和QClaw都有用户技能和系统技能(暂且叫做系统技能-预安装的技能):
用户技能:(以Mac配置为例,~/ 代表用户根目录)
系统技能:目录区别直接看图,不在再复述了。这里面QClaw的技能简单解释下:内置技能和Openclaw的全局技能一样;预装技能是QClaw-鹅厂自己添加的一些实用技能,两者都是预装的。本质上没区别,用户都可以直接调用。
接下来看下技能安装,Openclaw技能库是Clawhub,安装的方式(这里只讲最标准的,安装方式其实有很多,无非是下载,解压,拷贝文件):
# 1. 搜索技能npx skills find <关键词># 示例:npx skills find 天气# 2. 安装技能npx skills add <owner/repo@skill># 示例:npx skills add vercel-labs/agent-skills@vercel-react-best-practices
QClaw也能安装Clawhub上的技能(毋庸置疑,因为QClaw本身就是Openclaw的封装),但是就像前面讲的,QClaw改变了配置路径,所以不能直接用npx skills add命令了,需要手工下载,解压,拷贝文件了:
# 1. 搜索技能:这一步没区别npx skills find weather# 输出可能:someone/weather-skill# 2. 下载技能:要手动下载了(图省事直接用git,也可以拷贝zip)git clone https://github.com/someone/weather-skill.git# 3. 查看下载内容cd weather-skillls -la# 应有:SKILL.md、scripts/ 等# 4. 拷贝到 QClaw的标准技能目录下sudo cp -r weather-skill "/Applications/QClaw.app/Contents/Resources/openclaw/config/skills/"# 可能需要 sudo 因为应用目录受保护# 5. 修改权限(如果需要)sudo chmod -R 755 "/Applications/QClaw.app/.../config/skills/weather-skill"# 6. 重启 QClaw
第四步是最关键的不同,就像前面讲的,QClaw技能目录和标准的Openclaw技能目录是不一样的,如果不放在第四步指出的目录下面下载的技能是不能被正确找到的(希望后面QClaw能够做兼容,这样就能重用标准的安装命令了)。
当然Clawhub并不是唯一的技能获取的地方,自己也可以收工创建。这里的关键是,一个技能必须包含SKILL.md,大模型是通过读取这个文件里的description来匹配技能的。除此以外,只要技能能被下载到本地,安装到正确的路径(上面讲到的路径)。
写在最后
关于怎么彻底剥掉壳直接使用QClaw里面的Openclaw,下片会来介绍。

