夜雨聆风
夜雨聆风当前,人工智能正加速从数字世界走向真实物理世界。作为连接感知、决策与执行的重要方向,具身智能(Embodied AI)正在成为新一轮技术竞争的关键焦点。然而,要让智能系统真正走进复杂环境、完成真实任务,仅靠单一模型远远不够。多模态信息融合、异构Agent协同、动态任务编排与安全稳定执行,正在成为具身智能落地必须面对的核心挑战。正因如此,一个能够统筹全局、协调多方、持续进化的“智能中枢”,显得尤为重要。在这样的背景下,2025年11月由奥地利人Peter Steinberger开发且今日火遍全球的开源AI智能体OpenClaw可能出乎意外地成为具身智能的“智能中枢”。

一、OpenClaw:具身智能的“智能中枢”与任务编排者
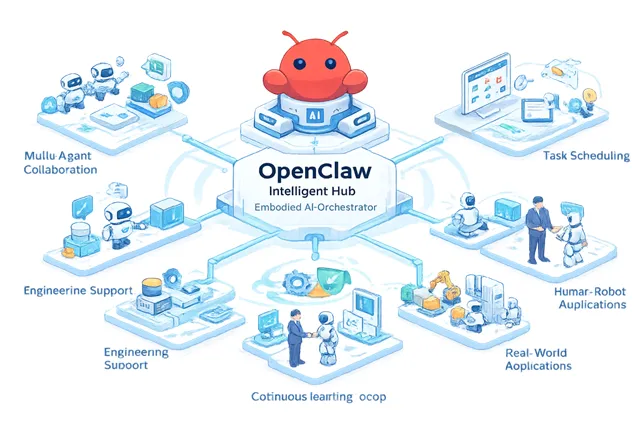
OpenClaw是一个基于LLM的多Agent任务编排框架,通过统一调度接口整合感知、规划与执行模块,专为复杂具身智能任务场景设计。它并非传统意义上的代码生成工具,而是面向复杂任务场景的“个人助理”与“任务编排者”。其核心能力在于高效调用并协调不同AI模型与Agent,完成从感知到规划、从决策到执行的全链路组织与调度。
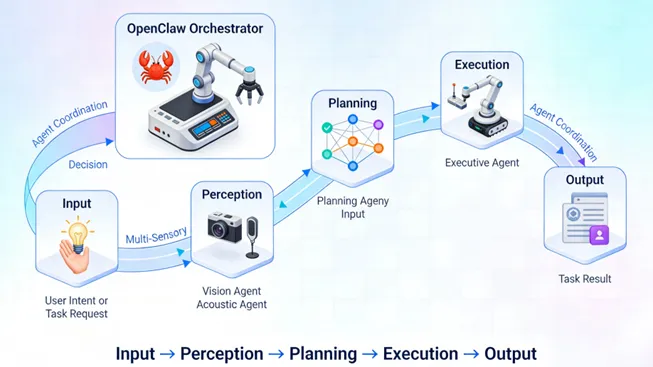
在具身智能语境下,OpenClaw可被理解为一个层级化控制体系中的核心枢纽:在感知层,它负责协调视觉、听觉、触觉等多模态感知Agent,整合环境信息;在规划层,它联动路径规划、动作规划等高级Agent,生成符合物理约束的行动方案;在执行层,它进一步调度机械臂、移动平台等执行模块,将决策转化为稳定、可控的物理操作。
正是这种贯穿感知、决策与执行的统一管理能力,使OpenClaw能够将复杂任务有效拆解、合理分配并闭环推进,推动具身智能从概念验证走向真实应用场景。
二、AI Agent Team协作与核心技术支撑
真实世界是动态的、开放的,也是充满不确定性的。面对复杂任务,单一Agent往往难以同时兼顾环境理解、路径规划、目标识别、动作执行与异常处理等多种能力。因此,构建高效协同的AI Agent Team,已成为具身智能发展的必然方向。
以“在仓库中找到并搬运指定物品”为例,一个完整任务通常需要导航Agent、识别Agent、抓取Agent、避障Agent等多角色协同完成。OpenClaw的关键作用,正在于通过统一编排机制让这些Agent各司其职、协同运行,从而显著提升系统在复杂场景中的整体效率与鲁棒性。
支撑这种多Agent协作的,是一套面向具身智能落地的关键技术体系:
1.SKILL固化:高频&确定性操作的程序化封装以提升执行稳定性
SKILL通过将高频且确定性操作封装为可复用的技能原语,将LLM的不确定决策与底层稳定执行解耦,从而在执行层降低系统整体的不确定性风险。通过将固定的、低级的物理操作(如“安全抓取A物体”、“精确移动到B位置”)固化并沉淀为技能包成脚本,形成可复用的具身技能(Embodied Skills),能够显著提高物理操作的稳定性和成功率。例如,一个抓取SKILL可内嵌力控、视觉反馈等细节,确保每次抓取鲁棒可靠。
2.Harness与Agent构造:软硬件高效协同的抽象层
Harness作为Agent构造理念的核心,在具身智能中可视为机器人操作系统(ROS)之上的抽象层或中间件。它整合各类传感器、执行器模块,并向上层Agent提供统一接口,确保底层软硬件高效协同和上层Agent有效调度,是Agent Team顺畅运行的保障。
3.对话隔离:确保Agent间互不干扰
为确保AI Agent团队高效运作,必须实现Agent间的合理分工与对话隔离。这意味着每项任务拥有独立的上下文,避免因信息混淆导致物理动作冲突或错误。尤其在机器人同时处理多个子任务时,对话隔离机制是保障系统稳定运行、防止行为冲突的关键。
4.GitLab协作与GitHub存储:开发与部署的基石
高效的Agent Team背后,离不开强大的开发与部署支持。OpenClaw利用GitLab进行机器人控制代码、AI模型和配置文件的协同开发,并通过GitHub等工具作为代码和训练数据的“网盘”,确保版本可追溯性,极大地便利了团队协作和多机器人平台的部署,为Agent Team的持续迭代提供了坚实基础。

三、OpenClaw的独特调度机制与生态整合
在具身智能系统中,任务能否高效推进,不仅取决于模型能力本身,更取决于调度机制是否足够灵活。OpenClaw在这一点上展现出鲜明优势:它能够结合任务优先级、环境变化与资源状态,对任务执行进行动态规划与弹性调度,使系统在复杂场景中既具效率,也具韧性。
在定时任务方面,OpenClaw形成了两类典型策略。其一是“代码写死”模式,即任务上下文彼此独立、无记忆,适用于周期性、低耦合的标准动作;其二是“HeartBeat”模式,即在固定频率下保留上下文与状态记忆,更适合连续监测、持续巡检等具有时间关联的任务。这种差异化设计,使系统能够在“稳定执行”与“持续感知”之间取得平衡。
同时,OpenClaw并不局限于单一系统内部,而是能够积极整合外部协同生态。通过与飞书等平台深度结合,它可以支持多主题任务并行推进、消息模板化输出以及更自然的人机协同流程,从而将具身智能能力进一步延展到团队协作与企业级工作流中。除此之外,tmux保障后台任务持续运行,Git+Vercel加速开发部署,Lint强化代码审核,采访模式提升复杂需求理解精度,这些能力共同构成了OpenClaw高效运行的重要支撑。
换言之,OpenClaw的调度机制并非简单的任务分发,而是面向真实场景的系统级协调能力。

四、AI的进化与“人机协作”的智慧
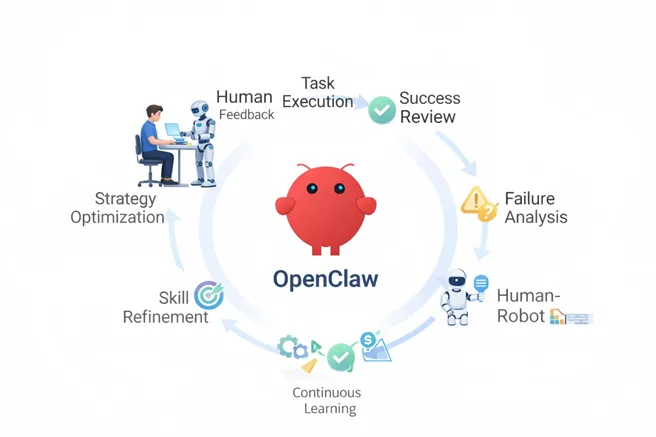
真正具备生命力的智能系统,不只是完成任务,更要在实践中持续学习、修正和进化。OpenClaw的价值,不仅体现在多Agent协同与任务编排上,更体现在其能够基于真实交互与执行反馈,不断优化决策逻辑、策略选择与安全边界,进而提升系统在复杂环境中的适应性、可靠性与稳定性。
这种持续进化,依托于以人机对话为入口、任务反馈为依据、SKILL沉淀为载体的闭环机制。系统既能复盘成功任务,将有效路径和关键参数提炼为可复用能力;也能分析失败案例,从碰撞、抓取失败或路径受阻中定位问题根源,减少重复性错误。同时,OpenClaw坚持“先排错、后执行”的原则,将安全置于效率之前,并保持对异常状态的持续敏感,及时识别环境变化与执行偏差,快速调整策略。
因此,OpenClaw追求的并非单纯的性能提升,而是推动具身智能从“执行工具”走向“智能伙伴”,实现更加高效、安全、自然的人机协作。
五、AI Coding分工协作新范式
面向未来,AI Coding不再是单模型主导的线性流程,而将形成一种更清晰的分工协作范式。不同系统各展所长,共同支撑具身智能从研发到落地的完整链条。
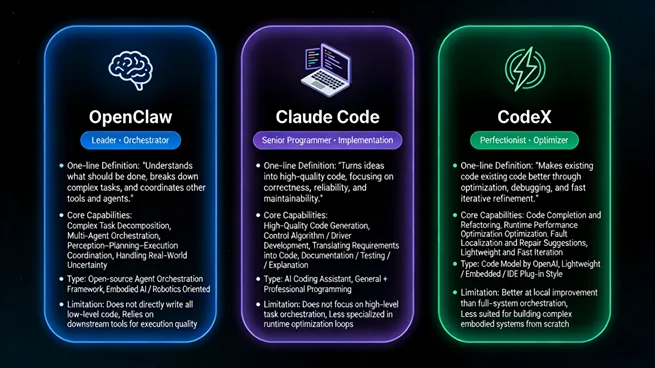
在这一体系中,OpenClaw更像是领导者与总调度者,负责将复杂任务拆解为可执行子任务,并协调感知、规划与执行Agent完成全流程编排。它决定“做什么、先做什么、如何协同做”。
Claude Code则更接近高质量工程实现者,专注于生成高可靠性的底层控制代码与功能模块,包括传感器驱动、运动控制、模型推理接口等关键部分,决定“代码如何写得更稳、更准、更可用”。
而CodeX则扮演优化者与兜底者的角色,重点负责性能调优、故障定位与代码修复,帮助系统在运行阶段持续提升效率、精度与稳定性,决定“出现问题后如何更快发现并修正”。
三者并非相互替代,而是形成了“调度编排—工程实现—优化兜底”的协同闭环。这种新的AI Coding分工格局,也为未来具身智能系统的大规模开发与部署提供了更清晰的方法论。
结语
作为具身智能领域的“智能中枢”与“任务编排者”,OpenClaw通过统一的多Agent协作框架、灵活的任务调度机制、稳定的工程支撑能力与持续进化的学习闭环,为下一代复杂具身智能系统提供了可落地的技术路径。它不仅提升了机器人在动态环境中执行复杂任务的能力,也描绘出AI Agent团队协作、人机深度融合的发展方向。随着这类系统不断演进,具身智能有望加速走进更多真实场景,开启更加高效、安全、智能的新范式。