 夜雨聆风
夜雨聆风
大家好,最近在搞国产化适配,项目在银河麒麟高级服务器系统上,需要部署 SRS 做流媒体分发。
本来想着 yum install -y srs 一把梭,结果你懂的,官方源里压根没有,网上倒是有几个 SRPM 包,但版本老得能进博物馆。自己编译运行倒是简单,可运维那边不干啊——没 rpm 包,后续分发、升级、卸载全靠手搓,这不符合生产环境的“洁癖”。得,自己动手打一个 rpm 包吧。以前总觉得打 rpm 是件很“上古”的事,一堆宏定义、spec 文件看着头大。但真走一遍下来,发现只要理清了逻辑,这玩意儿就是个编译动作的自动化脚本,顺便帮你把文件收拾利索了。
今天就把我在银河麒麟 V11 (2503 版本) 上,给 SRS 7.0 打 rpm 包的过程掰扯清楚。希望能给正在搞国产化信创的小伙伴一点参考。
准备编译环境,工欲善其事
我用的系统版本是:
[root@k8s-master ~]# cat /etc/.kyinfo[dist]name=Kylin-Server-V11milestone=2503-Release-General-20250715arch=x86_64beta=Falsetime=2025-07-23 06:01:24dist_id=Kylin-Server-V11-2503-Release-General-20250715-x86_64-2025-07-23 06:01:24[servicekey]key=0537044[os]to=term=2026-10-27
这就是我们常说的麒麟 V11 2503,内核是 6.6 的,生产环境很常见。
首先,你得有一台安装好银河麒麟V11-2503的机器(物理机或虚拟机都行)。确保系统能联网,我们要把打包要用到的家伙事儿先请进来:
yum install -y git gcc-c++ make cmake perl openssl-devel automake ffmpeg-devel rpm-build rpmdevtools
rpmdevtools 这个包很关键,它能帮你快速建立打包工作目录,不用自己 mkdir 一堆文件夹。装完跑一句:
rpmdev-setuptree
这命令会在你家目录下生成一个 rpmbuild 文件夹,里头长这样:
~/rpmbuild/├── BUILD # 编译源码的地方├── RPMS # 生成的二进制 rpm 包├── SOURCES # 放源码包和补丁文件├── SPECS # 放 spec 文件(打包的核心剧本)└── SRPMS # 源码 rpm 包
这个结构记心里,后面我们就在这“一亩三分地”里折腾。
获取SRS源码
我们直接从SRS的GitHub仓库获取最新的稳定版。如果网络访问受限,可以从国内获取:
国内地址:https://gitcode.com/GitHub_Trending/sr/srs?source_module=search_project
GitHub 地址:https://github.com/ossrs/srs
解压下载的源码包:
unzip srs-develop.zip
编译SRS ,见证奇迹的时刻
配置编译配置项
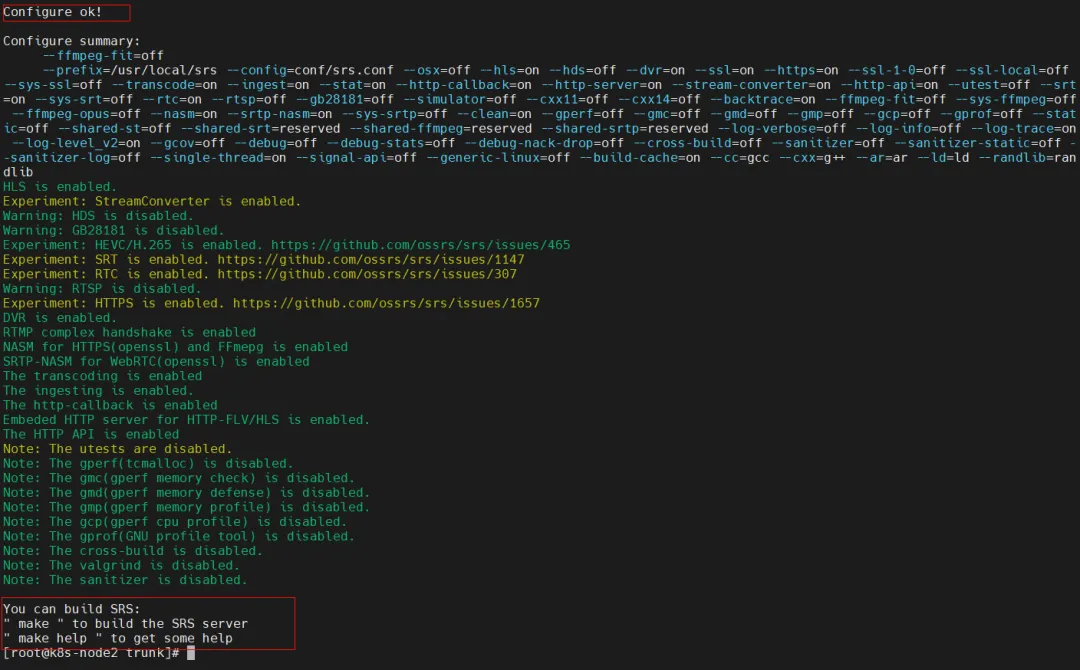
SRS的编译脚本做得很友好,直接./configure 就行。但注意,默认配置会开启很多功能,比如HTTP API、HLS、DASH等,如果你不需要,可以禁用以减少依赖,我这里关闭了ffmpeg-fit。
cd srs-develop/trunk/./configure --ffmpeg-fit=off
 |  |
预编译出现的问题

我们先前其实安装了,只是找不到库文件,建立软连接解决:
cd /usr/include/ln -s ffmpeg/libavcodec libavcodecln -s ffmpeg/libavutil libavutilln -s ffmpeg/libavformat libavformatln -s ffmpeg/libswscale libswscaleln -s ffmpeg/libswresample libswresample# 验证ls -la libavcodec

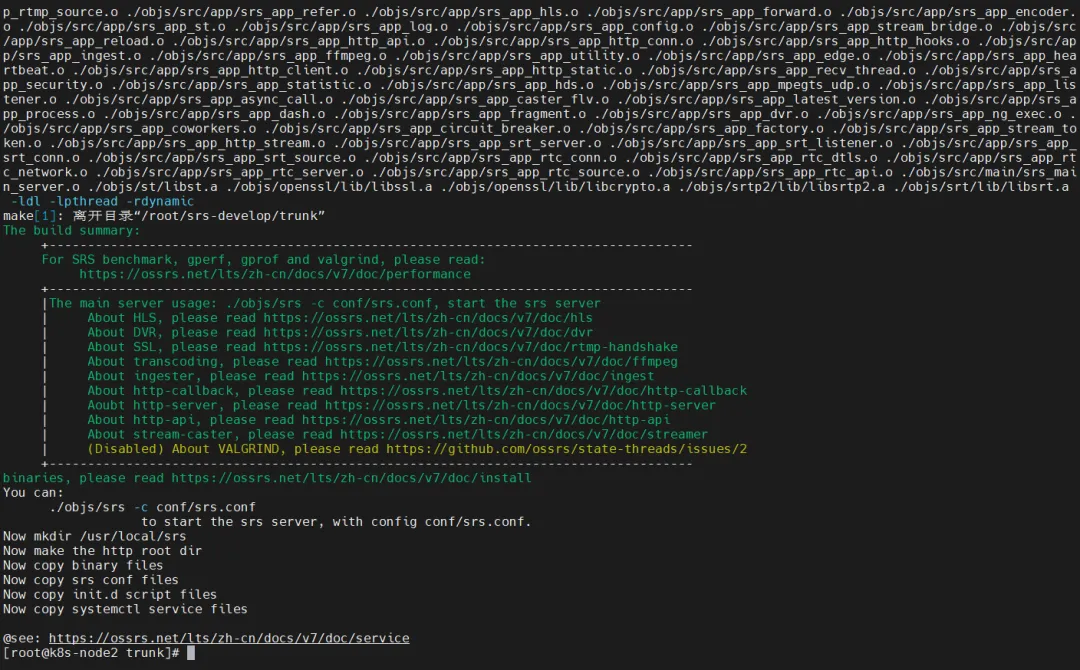
编译安装SRS
make && make install
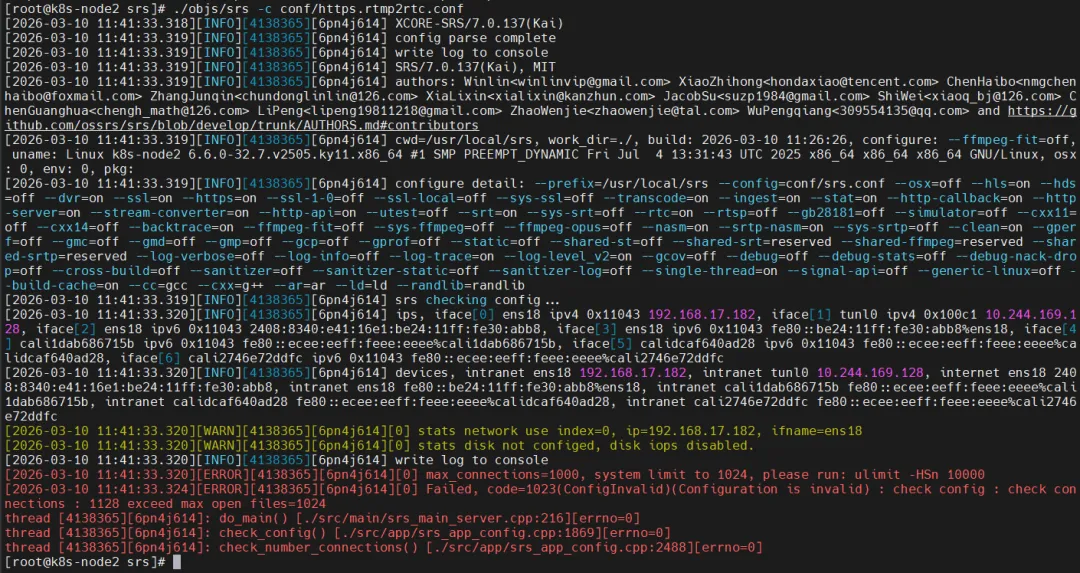
手动启动SRS
SRS默认的安装目录在/usr/local/srs下面。

手动启动SRS可能出现的问题
这是因为**Linux 系统对单个进程允许打开的最大文件描述符数量(max open files)限制为 1024**,而 SRS 需要的连接数(包含文件描述符)超过了这个限制,导致配置校验失败。
解决方案
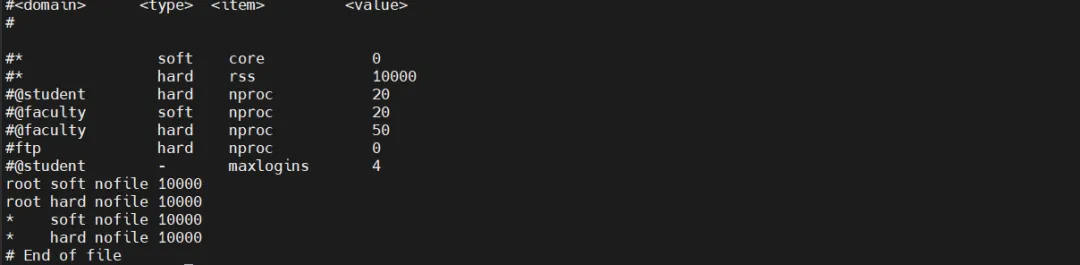
编辑文件 /etc/security/limits.conf , 在文件末尾添加以下内容(替换为运行 SRS 的用户,如 root):
root soft nofile 10000root hard nofile 10000* soft nofile 10000* hard nofile 10000
修改完成之后重启系统生效。
RPM打包
整理 SRS 编译产物
创建临时目录,存放待打包的 SRS 文件
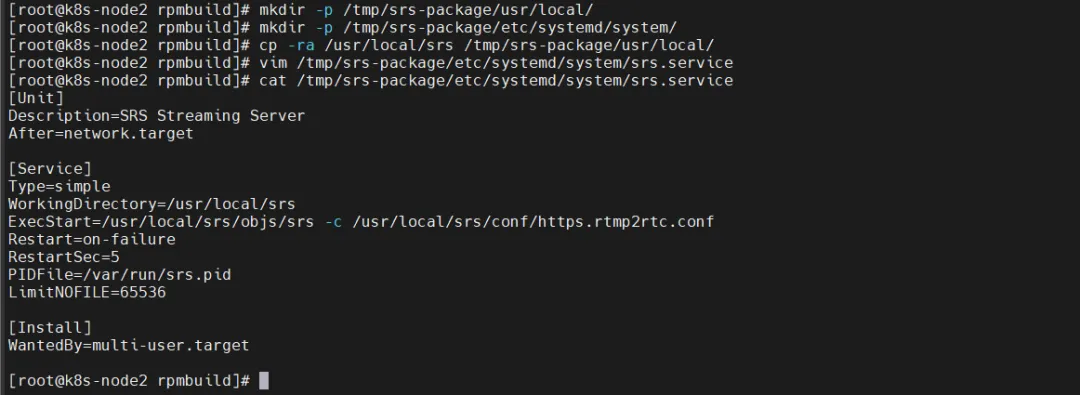
# 创建临时目录,存放待打包的 SRS 文件mkdir -p /tmp/srs-package/usr/local/mkdir -p /tmp/srs-package/etc/systemd/system/mkdir -p /tmp/srs-package/var/log/srs# 复制编译后的二进制文件(核心执行文件)等文件cp -ra /usr/local/srs /tmp/srs-package/usr/local/
创建systemd 服务启动文件,方便管理srs服务。
vim /tmp/srs-package/etc/systemd/system/srs.service
[Unit]Description=SRS Streaming ServerAfter=network.target[Service]Type=simpleWorkingDirectory=/usr/local/srsExecStart=/usr/local/srs/objs/srs -c /usr/local/srs/conf/https.rtmp2rtc.confRestart=on-failureRestartSec=5PIDFile=/var/run/srs.pidLimitNOFILE=65536[Install]WantedBy=multi-user.target
初始化 RPM 打包目录结构
# 自动生成 ~/rpmbuild 目录rpmdev-setuptree
编写 RPM 规格文件(.spec)
创建 spec 文件:
vim ~/rpmbuild/SPECS/srs.spec
这是最难搞也是最有意思的一步。在 ~/rpmbuild/SPECS 目录下新建一个 srs.spec 文件。
别被它吓着,本质上就是定义:从哪里拿源码 -> 怎么编译 -> 生成哪些文件 -> 安装前后执行啥命令。
下面是我的 srs.spec,加了注释,方便你理解:
# 基础信息Name: srsVersion: 7.0.137Release: 1%{?dist}Summary: Simple Real-Time Server (SRS) - Open Source RTMP/HLS/RTSP/WebRTC ServerLicense: MITURL: https://github.com/ossrs/srsSource0: srs-package.tar.gz# 依赖(确保系统有基础依赖)# Requires: glibc, systemd# BuildRequires: rpm-build, gcc, gcc-c++%descriptionSRS is a simple, high-efficiency, real-time video server supporting RTMP, WebRTC, HLS, HTTP-FLV, SRT, MPEG-DASH, and GB28181.%prep# 解压源码包(自动读取 Source0)%setup -q -n srs-package%install# 将临时目录的文件复制到 RPM 安装根目录(%{buildroot} 是 RPM 构建临时根)cp -r * %{buildroot}/%files# 定义 RPM 包包含的文件(路径需与 install 一致)/usr/local/srs/etc/systemd/system/srs.service/var/log/srs/# 权限设置%defattr(-,root,root)%post# 安装后操作:重新加载 systemd、设置开机自启systemctl daemon-reloadsystemctl start srssystemctl enable srs --now%preun# 卸载前操作:停止服务if [ $1 -eq 0 ]; then systemctl stop srs systemctl disable srsfi%changelog* Tue Mar 10 2026 Alex <2467813384@qq.com> - 7.0.137-1- Initial RPM package for SRS
打包并生成 RPM 包
打包待安装文件为 tar.gz
# 进入临时目录,打包为源码包cd /tmptar -zcvf srs-package.tar.gz srs-package/# 将源码包移动到 rpmbuild 的 SOURCES 目录mv srs-package.tar.gz ~/rpmbuild/SOURCES/
构建 RPM 包
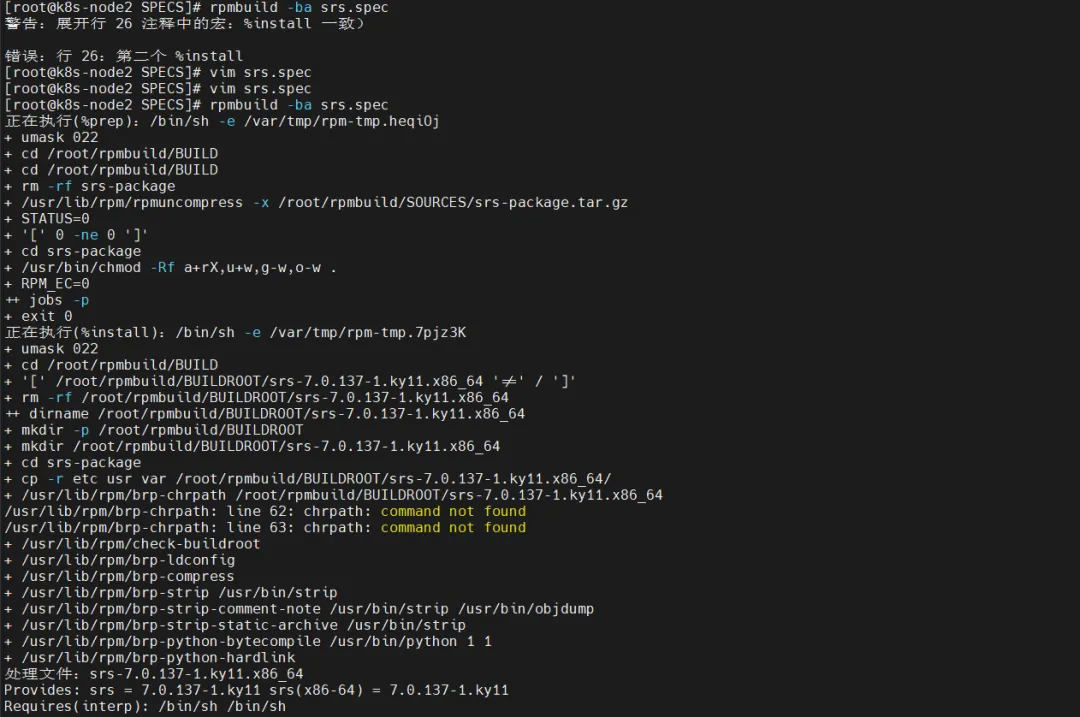
spec 文件写好了,源码也放到位了,执行打包命令:
# 进入 SPECS 目录,执行打包命令cd ~/rpmbuild/SPECS/rpmbuild -ba srs.spec
 | 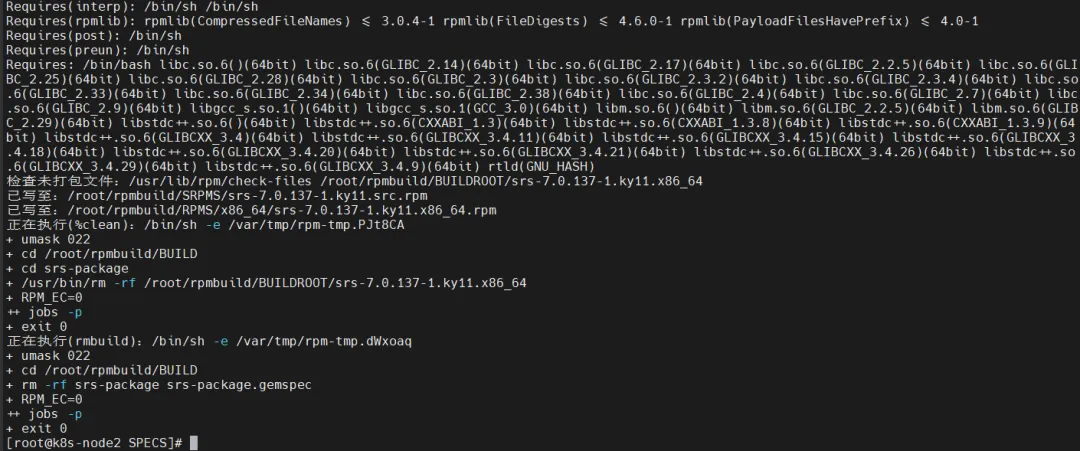 |
获取生成的 RPM 包
打包成功后,RPM 包会生成在 ~/rpmbuild/RPMS/x86_64/(需根据系统架构调整):
# 查看生成的 RPM 包ls ~/rpmbuild/RPMS/x86_64/

验证与安装 RPM 包
安装生成的 RPM 包
把打好的包传到一台测试机上试试:
rpm -ivh srsr软件包包名
验证安装
查看srs服务状态
systemctl status srs
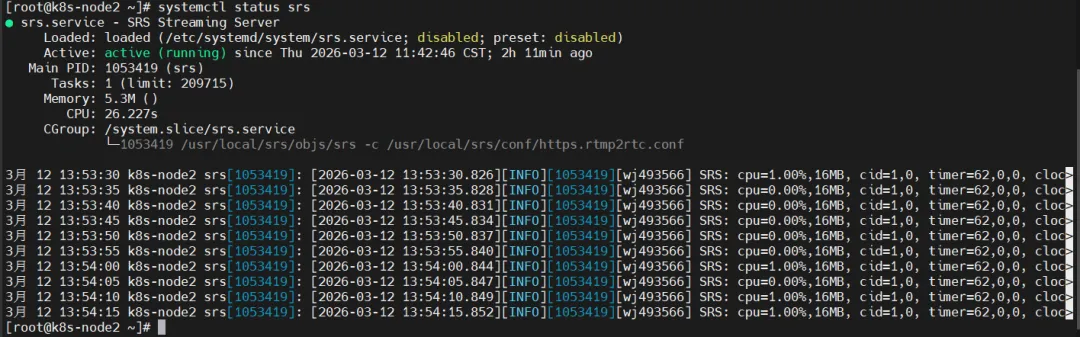
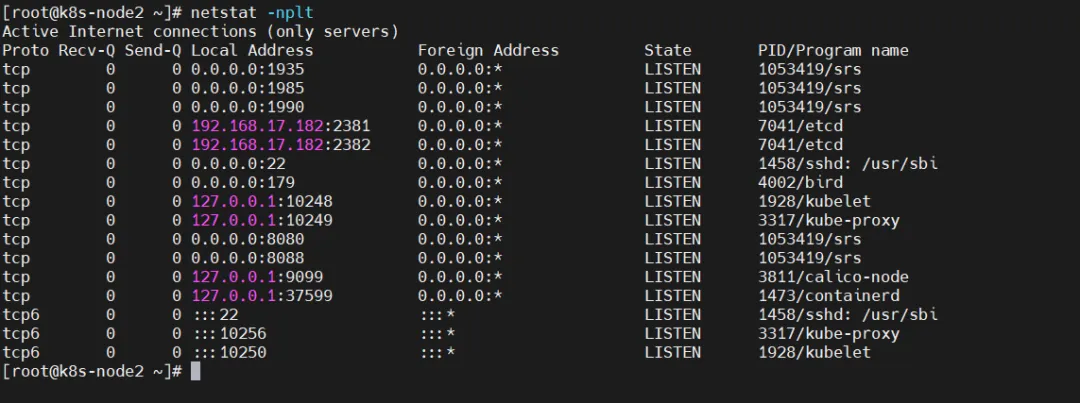
查看SRS监听端口
使用 netstat -nplt 查看端口,如果看到1935(RTMP)、1985(HTTP API)、8080(HTTP Server)等端口在监听,恭喜你,打包成功!
netstat -nplt
小小总结一下
折腾了大半天,终于把SRS的rpm包打出来了。对于信创项目而言,很多软件都需要这样“手搓”rpm包。整个过程不算复杂,但细节不少。尤其是spec文件的编写,需要反复调整。不过一旦成功,后续再编译新版本就轻车熟路了。
希望这篇文章能帮助到正在国产系统上折腾的你。如果你在打包过程中遇到问题,欢迎在评论区留言交流。原创不易,如果觉得有用,请点个赞、转发、关注支持一下,让更多人看到。
