 夜雨聆风
夜雨聆风当一辆智能汽车在路上行驶,控制它的不是方向盘后的工程师,而是数百万行经过严格设计的软件代码。在这些代码背后,有一套名为AUTOSAR的全球汽车软件标准在支撑着整个系统的运行。对于渴望进入汽车软件行业的技术人员来说,掌握AUTOSAR CP(Classic Platform)的相关技能,已经成为打开高薪岗位大门的一把关键钥匙。2026年,AUTOSAR已设定为“软件定义汽车”和“AI定义汽车”的全球可信基石,相关技能人才的需求正迎来爆发式增长。

第一章:从零认识AUTOSAR——为何它值得你投入时间学习
AUTOSAR的全称是“汽车开放系统架构”(AUTomotive Open System ARchitecture),它并非单一软件,而是一套由全球车企、零部件供应商和芯片公司共同制定的汽车电子软件标准。用一句话概括它的价值:它让汽车软件的开发从“各自为政”走向了“模块化、可复用、可移植”的工业化道路。
在传统开发模式下,更换一个ECU(电子控制单元)的硬件往往意味着软件也要重写。而AUTOSAR实现了软硬件的解耦,使得开发者可以像搭积木一样在不同车型、不同硬件平台上复用软件组件,大幅提升了开发效率和软件质量。
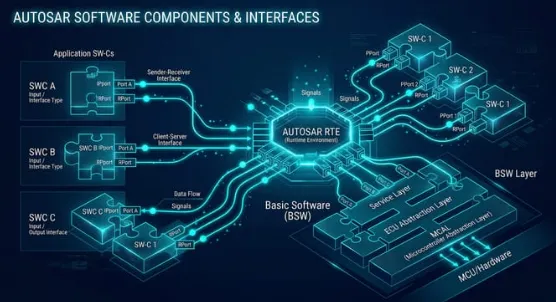
AUTOSAR Classic Platform的分层架构
AUTOSAR CP主要面向对实时性和安全性要求极高的嵌入式系统,其架构分为三大层次:
1
应用软件层(Application Software Layer) :由一个个独立的软件组件(SwComponentType)构成,封装了具体的控制算法和功能逻辑。这是你作为应用开发者最常打交道的层级。
2
运行时环境层(Runtime Environment,RTE) :这是连接应用软件和底层基础软件的关键桥梁。RTE负责实现软件组件之间的通信,将组件的调用请求路由到正确的位置。RTE的生成器需要考虑通信规范中定义的通信行为,包括队列长度、超时处理等细节。
3
基础软件层(Basic Software,BSW) :包含MCAL(微控制器抽象层)、ECU抽象层、复杂驱动以及各类服务模块(如通信栈、诊断模块、存储管理、操作系统等)。BSW屏蔽了硬件差异,为上层提供标准化的服务接口。
“类型-原型”模式:理解组件复用的核心
在学习AUTOSAR CP时,有一个概念必须牢牢掌握——“类型-原型”模式。简单来说,“类型”定义了一个软件的通用蓝图(比如一个“门控”软件组件的类型),而“原型”则是这个蓝图在具体系统中的一次实例化(比如“左前门控”和“右前门控”)。当你看到一个组件被多次使用时,就是在运用这种设计思想。理解了这一点,你就掌握了AUTOSAR实现软件复用的底层逻辑。
第二章:软件组件模板的核心构建块——端口、接口与通信
如果说AUTOSAR的软件组件是一块块功能独立的“积木”,那么端口(Port)和接口(Interface)就是这些积木的“插槽”和“插头”。一个软件组件只通过其端口与外界交互,这体现了AUTOSAR的核心封装原则——隐藏内部实现细节,只暴露明确定义的通信点。
四种核心端口与五种接口
端口有三种类型:RPortPrototype(需求端口,用于请求服务)、PPortPrototype(提供端口,用于提供服务)以及PRPortPrototype(需求+提供端口,兼具读写能力)。
而接口则定义了端口所承载的具体信息,主要有五种:
- •SenderReceiverInterface(发送者-接收者接口)
:用于基于数据的异步通信,一个发送者可以对应多个接收者。“InvalidationPolicy”(失效策略),它定义了当发送方主动将数据标记为无效时,接收方应采取何种行为——是保持旧值、替换为初始值,还是由应用层自行处理。 - •ClientServerInterface(客户端-服务器接口)
:用于操作调用的同步或异步通信,客户端发起请求,服务器执行并返回结果。每个操作(ClientServerOperation)可以包含多个参数(ArgumentDataPrototype),并指明方向(in、out、inout)。 - •ModeSwitchInterface(模式切换接口)
:用于传递模式信息。例如,整车控制器切换驾驶模式时,会通过此接口通知相关组件。 - •NvDataInterface(非易失数据接口)
:专门用于访问存储在非易失存储器中的数据。 - •ParameterInterface(参数接口)
:用于共享标定参数。
虚拟功能总线与运行时环境:让组件“对话”的魔力
“虚拟功能总线”(VFB)是一个抽象概念,它允许开发者在设计阶段不考虑ECU硬件,仅通过连接组件的端口来描述系统架构。组件通过AssemblySwConnector(装配连接器)连接需求端口和提供端口,通过DelegationSwConnector(委托连接器)将内部端口暴露给上层组合组件。
当系统部署到实际ECU上时,VFB会由RTE具体实现。RTE负责管理组件实例、调度可运行实体(RunnableEntity)、处理通信、维护数据一致性等。RunnableEntity是代码执行的最小单元,它可以通过数据访问点(DataAccessPoint)来读写端口上的数据。两种访问模式:隐式通信(Implicit)——数据在RunnableEntity执行前被锁定,执行结束后才写回;显式通信(Explicit)——通过API即时发送和接收。
掌握这些知识如何帮你拿到高薪Offer
当前市场上,AUTOSAR相关岗位的薪资极具吸引力。根据2026年的招聘数据,国内应届生MCU软件开发工程师的月薪可达18K-25K;有经验的AUTOSAR工程师在海外年薪可达100K-130K美元。面试官在考察AUTOSAR技能时,几乎必然会问及这些核心概念。
第三章:从理论到实践——配置、工具链与市场需求
理解了AUTOSAR的架构和核心概念后,下一步就是将这些知识落地到实际开发中。这涉及三个关键技能:数据类型建模、配置工具使用、以及理解服务依赖。

1. 数据类型的三层抽象与应用
AUTOSAR将数据类型划分为三个层次:应用数据类型(Application Data Type)、实现数据类型(Implementation Data Type)和基础类型(Base Type)。应用数据类型定义物理世界的语义(如“车速”的范围是0-300 km/h),实现数据类型定义它在代码中的表示(如“无符号16位整数”),基础类型则定义底层细节(如字节序、内存对齐、编码方式)。
“变长数组”(Variable-size Array)这一高级特性。它允许数组的实际长度在运行时动态变化,并通过一个“尺寸指示器”(Size Indicator)来告知接收端当前有效元素的数量。例如,在诊断数据传输场景中,这能显著节省带宽和存储资源。在面试中,如果你能清晰解释变长数组的使用场景和建模方法,会是一个很大的加分项。
2. 配置工具链与代码生成
在实际项目中,你很少会手动编写所有AUTOSAR代码,而是使用专业的配置工具(如Vector DaVinci、ETAS ISOLAR、EB tresos)。这些工具提供图形化界面,让你配置ECU参数、映射数据、生成RTE和BSW模块代码。AUTOSAR通过“上游映射”(Upstream Mapping),将ECU配置参数(如DCM的DID配置、NvM的块管理策略)与模型元素关联起来。掌握这些工具的用法,是从“了解AUTOSAR”到“能干活”的关键一步。
3. 服务依赖与高级功能开发
现代汽车的ECU并非孤立运行,它们需要与诊断、存储、通信、时间同步等基础软件服务交互。通过“服务依赖”(ServiceDependency)和“服务需求”(ServiceNeeds),开发者可以在组件层面声明对特定服务的需求。服务用例,涵盖:
- •NVRAM管理
:定义RAM块、ROM块以及写策略(如立即写入、周期写入、紧急写入)。 - •诊断通信
:实现UDS服务、DID读写、故障码(DTC)管理等。 - •时间同步
:基于StbM模块实现全局时间同步。 - •安全通信
:基于SecOC模块实现MAC验证和新鲜度值管理。
4. 市场需求与学习路径
目前,一汽、小鹏、经纬恒润等众多主机厂和Tier 1供应商都在大量招聘AUTOSAR相关人才。面试官通常会考察你对以下内容的掌握程度:
- •
AUTOSAR整体架构与标准规范。 - •
MCAL驱动开发与OS配置。 - •
通信协议栈(CAN/LIN/Ethernet)与诊断协议(UDS)。 - •
使用AUTOSAR配置工具进行BSW配置和RTE生成。 - •
功能安全(ISO 26262)和信息安全(ISO/SAE 21434)的基本概念。
结尾
从理解AUTOSAR的分层架构,到掌握软件组件模板的核心构建块,再到熟悉工具链和高级功能开发,这条学习路径虽然挑战重重,但带来的回报同样丰厚。在软件定义汽车的时代背景下,AUTOSAR技能已成为汽车软件工程师的核心竞争力。
面试
资料
学习
路线
学习
指导
多名10年+大厂经验
工程师在线指导
学习
交流
众多开发者一起交流
助力你提升技能
