 夜雨聆风
夜雨聆风GPT-4 能看图、Gemini 能看视频、Qwen-VL 能看中文文档——但一个语言模型是怎么'看见'图像的?答案藏在三个组件的协作中:视觉编码器把图像切成 token,对齐模块把视觉 token 翻译成语言能懂的格式,LLM 把它们和文字一起处理。本文从 ViT 到 CLIP 到 LLaVA,完整拆解多模态大模型的架构。
从 Embedding 说起
在 《当数字学会了远近亲疏》 那篇文章中,我们走到了一个惊人的结论:
文字、图片、声音——不同的入口,同一个空间。"猫"这个概念,无论你写它、拍它、还是听它叫——在足够好的 Embedding 中,它们都是邻居。
但那篇文章留了一个核心问题没有展开。
好,它们在同一个空间了——然后呢?
当你给 GPT-4V 一张照片说"描述这张图",它内部到底发生了什么?CLIP 只是让图文向量"靠近",但 GPT-4V 能看着图片生成一段话——这中间的鸿沟是怎么跨过去的?
今天这篇文章就来回答这个问题。
一、两个世界的语言
文本:离散的、有限的
文本对计算机来说是"友好"的。词表是有限的(5 万到 15 万个 token),每个 token 有一个编号,通过 Embedding 矩阵查表得到一个向量。
"国王戴着金色的王冠"
↓ Tokenizer
["国王", "戴", "着", "金色", "的", "王冠"]
↓ Embedding 查表
[vec₁, vec₂, vec₃, vec₄, vec₅, vec₆] ← 每个 vec 是一个 4096 维的向量
这个过程在 Embedding 那篇文章里已经讲透了:本质上就是查一张训练出来的表。
图像:连续的、无穷的
图像就不一样了。一张 224×224 的 RGB 图像是一个 224×224×3 = 150,528 个数字的矩阵。每个像素的值是 0-255 之间的连续数值。
关键区别:
文本: 词表有限(5万个)→ 可以为每个 token 存一行 Embedding → 查表
图像: 像素组合无穷 → 不可能为每种图像存一行 Embedding → 必须"计算"
文本 Embedding 是查表,图像 Embedding 是计算。 这个区别决定了后面所有的架构设计。
Transformer 的限制
还有一个更实际的问题。Transformer(LLM 的核心架构)处理的是序列——一排 token,一个接一个。Attention 机制在 token 之间计算相关性。
文本天然就是序列。但图像是一个二维网格,不是序列。
所以,第一个要解决的问题是:怎么把一张图变成一个 token 序列?
但在回答这个问题之前,有一个更根本的问题需要先回答。
等一下——CNN 不是早就能处理图像了吗?
如果你对深度学习有一些了解,可能会问:卷积神经网络(CNN)从 2012 年起就在图像识别上大杀四方了,为什么不继续用 CNN,非要用 Transformer?
这个问题问得好。
CNN 在图像领域的成就是真实的:
2012 AlexNet 赢 ImageNet 大赛,错误率直接砍半 → 深度学习爆发
2015 ResNet 做到 152 层,图像识别准确率超越人类
2017 人脸识别、自动驾驶、医学影像检测 → 全部基于 CNN
CNN 擅长图像,是因为它天生为图像设计——卷积核在图像上"滑动",捕捉局部特征(边缘、纹理、形状),层层叠加从低级特征到高级语义。
但 CNN 有一个根本局限:它的输出是一个固定的特征向量——一个"总结",而不是一个"序列"。
CNN 能做的:
一张图 → "这是猫" (分类)
一张图 → "猫在这个位置" (检测)
一张图 → "这些像素属于猫" (分割)
CNN 做不了的:
一张图 + "图里有什么?" → 生成一段话回答
一张图 + 一段文字 → 综合推理
因为 CNN 只输出一个"结论向量",它没办法和文字序列混在一起做 Attention。
打个比方:CNN 像一个只会写"诊断结论"的医生——输入一张片子,输出"肺结节,3mm,右上叶"。它不会和你对话,不会回答"为什么你觉得是结节而不是血管断面?"
Transformer:一个意外的"通用引擎"
2017 年 Transformer 为自然语言发明之后,大家逐渐发现一件意外的事:
文本用 Transformer → GPT, BERT → 效果最好
图像用 Transformer → ViT (2020) → 追平甚至超越 CNN
语音用 Transformer → Whisper → 效果最好
蛋白质用 Transformer → AlphaFold 2 → 革命性突破
一个架构,统一了所有领域。
为什么 Transformer 能做到这一点?因为它的工作方式是模态无关的:
CNN: 用固定大小的卷积核在二维网格上"滑动"
→ 天然适合图像,但不适合变长序列(文本)
Transformer: 接收一组向量,用 Attention 计算每个向量和其他所有向量的关系
→ 它不关心这些向量来自哪里——文字、图像、音频,都只是"向量"
→ 模态无关 (modality-agnostic)
所以,选择 Transformer 不是因为它处理图像比 CNN 更强——在纯图像任务上两者差不多。而是因为 Transformer 是目前唯一一个能同时处理多种模态的统一架构。
一个有趣的事实:CLIP 最早的版本,图像编码器用的其实是 ResNet(一种 CNN)。后来才换成 ViT。这说明 CNN 并没有被"淘汰"——它仍然可以做视觉编码器。但不管用 CNN 还是 ViT 做视觉编码器,最终输出都要变成一组向量,喂进 Transformer LLM。整个系统的"大脑"是 Transformer,视觉编码器只是"眼睛"。
用 ViT 做"眼睛"的好处是:输入输出都是 Transformer,端到端同一种架构,优化更简单。
理解了这个背景,ViT 的出现就不再突兀了——它是让 Transformer 统一所有模态的关键一步。
二、让图像变成 token — Vision Transformer
一个优雅的想法
2020 年底,Google 的 Dosovitskiy 等人提出了一个看似简单但影响深远的想法:
把图像切成小块(patch),每个小块当作一个"视觉词元"(visual token)。
就像文本被切成 token 一样,图像也可以被切成 patch。然后用 Transformer 处理这些 patch——和处理文本用的是同一套架构。
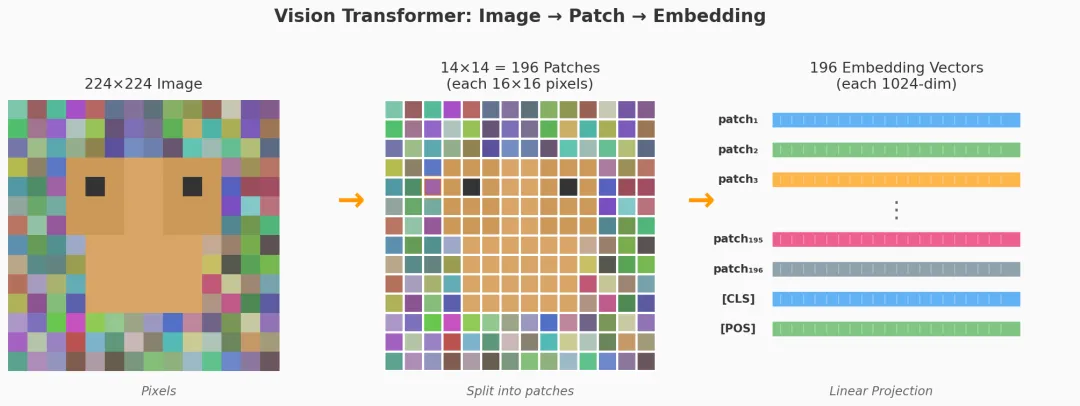
这就是 Vision Transformer (ViT)。论文的标题说明了一切:"An Image is Worth 16×16 Words"——一张图片值 16×16 个词。
Dosovitskiy, A. et al. (2020). An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. ICLR 2021.
具体怎么做?
一张 224×224 的图像:
1. 切成 patch
────────────
每个 patch 是 16×16 像素
224 ÷ 16 = 14
所以得到 14×14 = 196 个 patch
2. 展平 (Flatten)
────────────
每个 patch 原本是 16×16×3 = 768 个像素值
把它展平成一个 768 维的向量
3. 线性投影 (Linear Projection)
────────────
用一个可学习的矩阵 E (768×D),把每个 patch 向量投影到 D 维
D 通常是 768 或 1024
4. 加上位置编码
────────────
每个 patch 加上一个可学习的位置向量
让模型知道"这个 patch 在图像的哪个位置"
5. 送入 Transformer
────────────
196 个向量组成一个序列
用标准的 Multi-Head Attention + MLP 处理
和 GPT 处理文本 token 的方式完全一样
和文本 Embedding 的对比
这个过程和文本 Embedding 有惊人的相似,也有关键的不同:
| 查表 | 计算 | |
核心洞察:文本是从一个有限的词表中查表,所以用 nn.Embedding(一个矩阵)。图像的输入空间是连续的、无穷的,不可能为每种像素组合存一行,所以用线性投影(一次矩阵乘法)来"计算"出 Embedding。
但从 Transformer 的角度看,文本 token 和视觉 token 长得一模一样——都是一个固定维度的向量。Transformer 不关心这个向量是查表来的还是计算来的。这就是 Transformer 的通用性:它是一个序列处理引擎,不挑食。
ViT 的一个额外 token:[CLS]
ViT 在 196 个 patch token 前面加了一个特殊的 [CLS] token(class token)。这个 token 没有对应任何图像区域,它的初始值是随机初始化的。
输入序列: [CLS] [patch₁] [patch₂] ... [patch₁₉₆]
经过 N 层 Transformer 后:
[CLS] 的输出向量通过 Attention 汇聚了所有 patch 的信息
→ 用这个向量做图像分类
[CLS] token 的作用是"总结全局信息"——它通过 Attention 和所有 patch 交互,最终得到一个代表整张图像的向量。
这个设计借鉴自 NLP 中的 BERT——BERT 也在序列开头放一个 [CLS] token 用于分类。又一次,文本和视觉共享了同一个设计模式。
三、对比学习 — 让文字和图片住进同一个空间
ViT 解决了"把图像变成 token 序列"的问题。但 ViT 输出的向量和 LLM 中文本的向量,不在同一个空间。
一个 ViT 训练出来做图像分类,它的向量空间被组织成"猫 vs 狗 vs 车 vs ..."。一个 GPT 训练出来做文本生成,它的向量空间被组织成"国王 vs 王后 vs 的 vs ..."。
这两个空间没有任何对应关系。 "猫"的图像向量和"猫"的文本向量,可能指向完全不同的方向。
怎么让它们对齐?
CLIP 的方案:一起训练,互相靠近
2021 年,OpenAI 提出了 CLIP (Contrastive Language-Image Pre-training),用一个简单而强大的想法解决了这个问题:
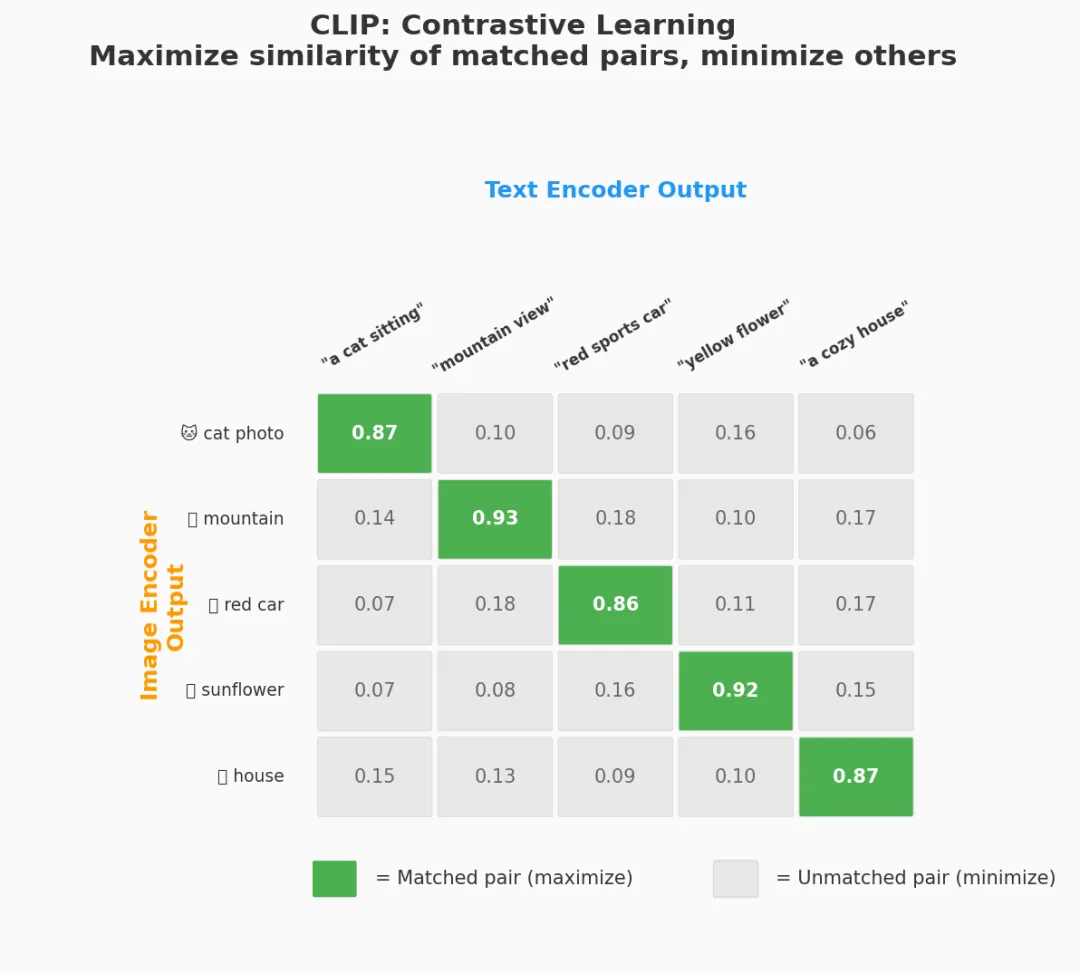
不分别训练图像模型和文本模型,而是同时训练,让匹配的图文对的向量尽可能近,不匹配的尽可能远。
Radford, A. et al. (2021). Learning Transferable Visual Models From Natural Language Supervision. ICML.
训练数据
CLIP 从互联网上收集了 4 亿个(图片, 文字描述)配对。比如:
(一张猫坐在垫子上的照片, "a cat sitting on a mat")
(一张日落的照片, "beautiful sunset over the ocean")
(一张红色跑车的照片, "red sports car on the road")
...
× 4 亿对
训练过程
CLIP 有两个编码器:一个图像编码器(ViT),一个文本编码器(Transformer)。训练时:
一个 batch 有 N 个图文对(CLIP 原论文中 N = 32,768)
图像编码器: img₁, img₂, ..., imgₙ → I₁, I₂, ..., Iₙ (图像向量)
文本编码器: txt₁, txt₂, ..., txtₙ → T₁, T₂, ..., Tₙ (文本向量)
计算 N×N 的余弦相似度矩阵:
T₁ T₂ T₃ ... Tₙ
I₁ [ 0.92 0.03 0.08 ... 0.01 ] ← 希望对角线最大
I₂ [ 0.05 0.89 0.02 ... 0.04 ]
I₃ [ 0.01 0.07 0.91 ... 0.06 ]
...
Iₙ [ 0.03 0.02 0.01 ... 0.87 ]
训练目标:
✓ 对角线(匹配对)→ 相似度尽可能高
✗ 非对角线(不匹配对)→ 相似度尽可能低
对比学习的直觉
为什么这种方式有效?
想象一个巨大的向量空间。训练开始时,图像向量和文本向量随机分布。
第一步:模型看到 (猫的照片, "a cat sitting")
→ 把"猫照片的向量"和"a cat sitting的向量"往一起拉
→ 同时把它们和 batch 中其他所有不匹配的向量推远
经过几十亿次这样的拉近/推远操作后:
- 所有猫的图片向量,和所有关于猫的文字向量,聚在了一起
- 所有汽车的图片向量,和所有关于汽车的文字向量,聚在了另一起
- ...
最终:图像和文本共享了一个语义空间。
这就是在 Embedding 文章中提到的"让文字和图片住进同一个空间"的具体实现方式。
温度参数 τ
CLIP 的损失函数中有一个可学习的"温度参数" τ(tau):
相似度计算: sim(I, T) = cos(I, T) / τ
τ 小 → 相似度被放大 → 模型对"匹配/不匹配"的区分更严格
τ 大 → 相似度被压缩 → 模型对区分更宽容
CLIP 让 τ 也作为可学习的参数,让模型自己找到最合适的"严格程度"。这是一个优雅的设计——不用人为调参,让模型自己决定。
训练完成后能做什么?
零样本分类 (Zero-Shot Classification):
给一张新图片,和一组文字标签("猫", "狗", "车", "飞机"...)
计算图片向量和每个标签向量的相似度
相似度最高的就是分类结果
→ 不需要任何标注数据!只需要写出类别名字
以文搜图:
输入文字 "a dog playing in the snow"
在图库中找和这段文字最相似的图片向量
→ 语义搜索
以图搜文:
给一张图,找和它最匹配的文字描述
CLIP 让图像和文本在同一个空间中用同一种"语言"交流。 这为后面的多模态 LLM 奠定了基础——因为多模态 LLM 需要一个"已经懂得图像语义"的视觉编码器,而 CLIP 正好提供了这样一个编码器。
四、三段式架构 — 多模态 LLM 的工作原理
有了 ViT(把图像变成 token)和 CLIP(让图文对齐),终于可以回答今天的核心问题了:
一个多模态 LLM 是怎么"看着图片说话"的?
核心架构
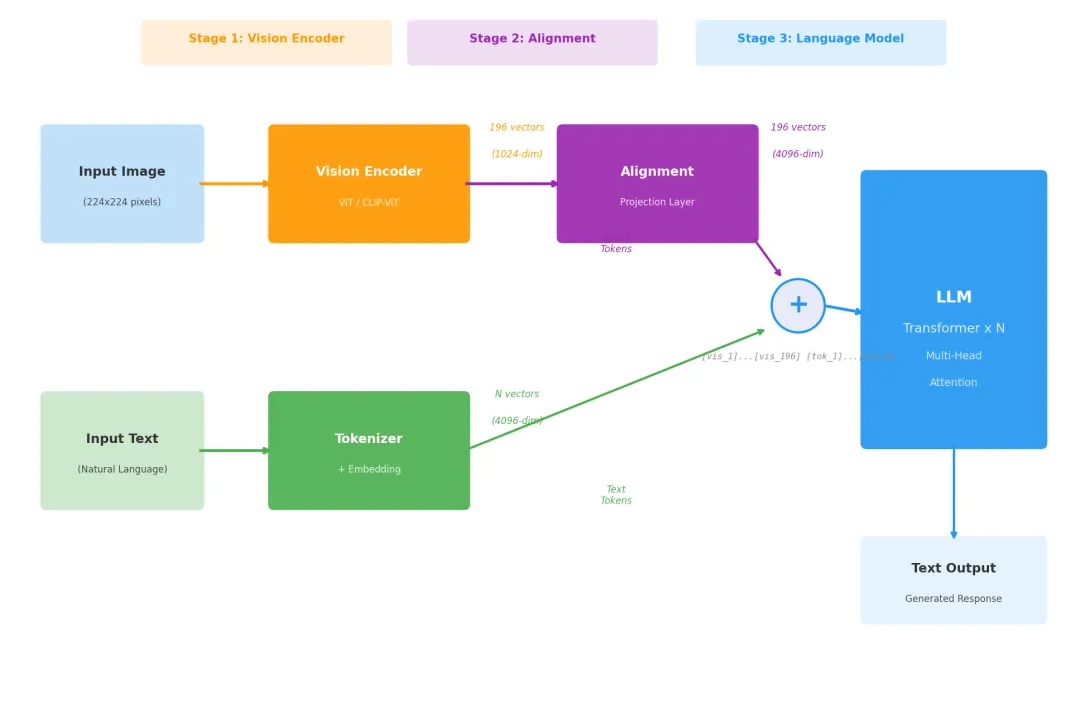
当前主流的多模态 LLM(LLaVA, Qwen-VL, InternVL, GPT-4V 等)都采用类似的"三段式"架构:
三个组件的职责
① 视觉编码器 — AI 的"眼睛"
输入: 一张图像 (224×224×3)
输出: 196 个视觉特征向量 (每个 1024 维)
通常使用预训练好的 CLIP-ViT,权重冻结不动。
为什么冻结?因为 CLIP 已经在 4 亿图文对上训练好了,
它已经"学会了看"——不需要从头学。
② 对齐模块 — "翻译官"
输入: 196 个视觉向量 (1024 维)
输出: 196 个对齐后的向量 (4096 维)
问题: 视觉编码器输出的向量是 1024 维,
LLM 的输入需要 4096 维。
而且它们不在同一个空间——维度、含义都不匹配。
对齐模块做两件事:
1. 维度映射: 1024 → 4096
2. 语义对齐: 让视觉特征进入 LLM 能"理解"的空间
③ LLM — "大脑"
输入: [视觉token₁]...[视觉token₁₉₆][文本token₁]...[文本tokₙ]
输出: 逐 token 生成文本回答
LLM 不知道(也不需要知道)前 196 个 token 来自图像。
对它来说,这就是一个普通的 token 序列。
它用标准的 Multi-Head Attention 处理这个序列——
文本 token 会 attend to 视觉 token,找到相关的视觉信息,
然后基于这些信息生成回答。
用一个具体例子走一遍
假设你给多模态 LLM 一张苹果的照片,问:"这张图片里是什么?它是什么颜色的?"
Step 1: 视觉编码器处理图像
────────────────────────
苹果照片 (224×224)
→ ViT 切成 196 个 patch
→ 每个 patch 通过 Transformer 层
→ 输出 196 个 1024 维向量
其中:
苹果主体区域的 patch → 向量编码了"圆形、红色、光滑表面"的特征
背景区域的 patch → 向量编码了"白色、平坦"的特征
Step 2: 对齐模块
────────────────────────
196 个 1024 维向量
→ 线性投影: × W (1024×4096) + b
→ 196 个 4096 维向量
这些向量被映射到了 LLM 的词向量空间附近——
苹果区域的视觉 token 现在和 "苹果"、"红色" 等文字 token 在空间中距离较近
Step 3: LLM 处理混合序列
────────────────────────
输入序列:
[vis₁][vis₂]...[vis₁₉₆] [这张][图片][里是][什么][?][它][是][什么][颜色][的][?]
↑ 来自对齐模块 ↑ 来自 Tokenizer + Embedding
Attention 在工作:
当 LLM 生成回答时——
"图片" 这个 token attend to 所有视觉 token
→ 发现苹果区域的视觉 token 贡献最大
→ 在隐状态中激活了"苹果"的概念
"颜色" 这个 token attend to 苹果区域的视觉 token
→ 发现这些 token 编码了"红色"的特征
→ 在隐状态中激活了"红色"的概念
Step 4: 逐 token 生成回答
────────────────────────
"图" → "片" → "中" → "是" → "一" → "个" → "红" → "色" → "的" → "苹" → "果" → "。"
每生成一个 token,模型都可以回头 attend to 视觉 token,
确保回答与图像内容一致。
关键理解:多模态 LLM 并没有发明新的 Attention 机制。它用的就是标准的 Transformer Attention——只不过 Attention 的输入序列中,前面一段是视觉 token,后面一段是文本 token。Transformer 本身不区分两者,它只是在"一堆向量"之间计算相关性。
这也解释了为什么对齐模块如此重要——如果视觉 token 和文本 token 不在同一个向量空间里,Attention 计算出来的相关性就是无意义的。
五、对齐模块的三种方案 — 翻译官的不同风格
对齐模块是多模态 LLM 中设计空间最大的部分。不同的模型选择了不同的方案,各有优劣。
方案 A:线性投射 — 简单直接 (LLaVA)
视觉特征 (196个, 1024维)
↓
× W (1024×4096) + b ← 就是一次矩阵乘法
↓
对齐后的视觉 token (196个, 4096维)
参数量: 1024 × 4096 ≈ 400 万
训练: 只需要训练这 400 万个参数
LLaVA(Liu et al., 2023)选择了最简单的方案——一个线性层。
Liu, H. et al. (2023). Visual Instruction Tuning. NeurIPS.
为什么这么简单也能工作?
因为 CLIP 的视觉编码器已经学了一个很好的语义空间。视觉特征已经"知道"什么是猫、什么是红色。对齐模块只需要做一个坐标变换——把 1024 维的坐标系旋转/缩放/平移到 4096 维的 LLM 坐标系。
LLaVA 论文的一个重要发现是:仅靠一个线性层,加上足够好的视觉编码器和足够好的训练数据,就能达到令人惊讶的效果。 简单不等于差。
方案 B:Q-Former — 用 query 提问 (BLIP-2)
视觉特征 (196个, 1024维)
│
│ 32 个可学习的 query token
│ ↓
└──→ Cross-Attention: query attend to 视觉特征
↓
32 个输出向量 (768维)
↓
线性投影
↓
32 个 LLM 输入 token (4096维)
BLIP-2(Li et al., 2023)用了一个更复杂的方案。它不是直接投影 196 个视觉 token,而是用 32 个可学习的 query token 通过 Cross-Attention 去"查询"视觉特征。
Li, J. et al. (2023). BLIP-2: Bootstrapping Language-Image Pre-training with Frozen Image Encoders and Large Language Models. ICML.
query 的直觉:想象 32 个记者去采访 196 个目击者。每个记者有自己的"采访角度"(query),它通过 Attention 从 196 个目击者中提取最相关的信息。最终,32 个记者的报道(而不是 196 个目击者的原始证词)被提交给 LLM。
Q-Former 的好处:
- 信息压缩
:196 → 32,减少了 LLM 需要处理的视觉 token 数,降低了计算成本 - 可学习的提取
:query token 可以学到"什么信息对 LLM 最有用" - 灵活性
:query 的数量可以调,精度和效率可以权衡
代价:比线性投射复杂得多,有 ~188M 参数需要训练。
方案 C:动态分辨率 (Qwen-VL, InternVL)
问题: 不同图片的有效内容大小不同
- 一张全景照 → 需要高分辨率(大图切更多 patch)
- 一个简单的图标 → 低分辨率就够了(小图少切几个 patch)
ViT 默认切固定数量的 patch (196个)——不管图片是什么。
动态分辨率方案:
1. 根据图像内容,选择合适的分辨率
2. 不同分辨率切出不同数量的 patch
3. 用 Resampler 或 Perceiver 将可变数量的视觉 token
压缩到固定数量
例如 Qwen-VL:
小图: 256 个 token
中图: 512 个 token
大图/高细节: 1280 个 token
这个方案在 Qwen-VL 和 InternVL 2 中被采用。好处是对高分辨率图像的细节保留更好,代价是实现复杂度更高。
三种方案对比
| 复杂度 | |||
| 对齐模块参数 | |||
| 视觉 token 数 | |||
| 细节保留 | |||
| 适合场景 |
一个设计哲学的问题
这三种方案背后有一个更深的问题:对齐模块应该做多少"理解"?
极简派 (LLaVA):
对齐模块只做坐标变换,不做理解。
理解全部交给 LLM。
哲学: "把原始信息尽可能完整地传给 LLM,让 LLM 自己决定怎么用"
压缩派 (BLIP-2):
对齐模块先做一轮信息提取,然后传给 LLM。
哲学: "先帮 LLM 筛选好重要信息,减轻 LLM 的负担"
自适应派 (Qwen-VL):
根据输入内容动态调整传递的信息量。
哲学: "简单的图少传,复杂的图多传"
目前没有定论哪种更好——在不同的任务和规模下,答案可能不同。但 LLaVA 用最简单的方案取得了很好的效果,这本身就是一个值得思考的事实:有时候,不在中间层过度加工,反而是更好的选择。
六、训练过程 — 分阶段解冻
多模态 LLM 的训练不是"从头到尾一起训",而是分阶段的。每个阶段解冻不同的组件。
为什么要分阶段?
三个组件的状态:
视觉编码器 → 在 CLIP 上预训练好了,已经"会看"
LLM → 在大规模文本上预训练好了,已经"会说"
对齐模块 → 随机初始化,什么都不会
如果一开始就全部一起训:
对齐模块在学习"怎么翻译"的同时,
可能会把 ViT 和 LLM 已经学好的知识搅乱
→ 灾难性遗忘 (catastrophic forgetting)
所以: 先只训练对齐模块(让它学会翻译),
再逐步解冻其他部分(让整个系统磨合)。
LLaVA 的两阶段训练
以 LLaVA 为例(最清晰的两阶段方案):
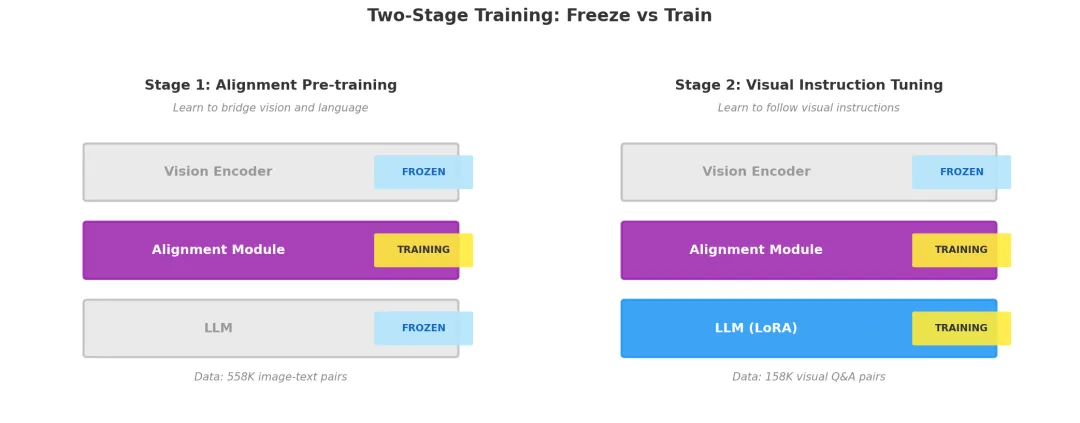
Stage 1:图文对齐预训练(Feature Alignment)
目标: 让对齐模块学会"翻译"——把视觉特征翻译成 LLM 能理解的格式
冻结: ✅ 视觉编码器(CLIP ViT) ← 已经会看了,别动
✅ LLM(如 Vicuna-13B) ← 已经会说了,别动
训练: 🔥 对齐模块(线性投射层) ← 从随机开始学
数据: 558,000 个 (图片, 文字描述) 配对
来源: CC3M 数据集,GPT-4 帮忙生成描述
任务: 给一张图片,生成对应的文字描述
让对齐模块学到: 怎么把视觉向量投射到 LLM 的空间中,
使得 LLM 能基于视觉 token 生成正确的描述
训练时间: 约 4 小时 (8× A100)
这个阶段结束后,对齐模块已经学会了基本的翻译——但模型只会"描述图片",还不会"回答关于图片的问题"。
Stage 2:视觉指令微调(Visual Instruction Tuning)
目标: 让模型学会按照指令回答关于图片的问题
冻结: ✅ 视觉编码器 ← 继续冻结
训练: 🔥 对齐模块 ← 继续微调
🔥 LLM(全参数或 LoRA) ← 解冻!开始调整
数据: 158,000 条视觉问答/对话数据
格式: (图片, 问题) → 回答
用 GPT-4 / GPT-4V 帮忙生成高质量的问答对
例子:
图片: 一张厨房的照片
问题: "这个厨房有什么不寻常的地方?"
回答: "这个厨房的不寻常之处在于水槽里堆满了脏盘子,
而台面上摆着一个看起来很精致的蛋糕..."
训练时间: 约 10 小时 (8× A100)
这个阶段结束后,模型不仅会描述图片,还会回答各种问题、进行多轮对话、做推理。
为什么视觉编码器始终冻结?
两个原因:
1. 效率: ViT 有 ~300M 参数,冻结它可以节省大量计算
2. 保护: CLIP-ViT 在 4 亿图文对上训练的视觉能力非常强,
如果解冻它用少量数据微调,可能会破坏这种能力
但也有例外: 当领域和 CLIP 的预训练数据差异很大时
(比如医学影像、卫星图像),可能需要解冻 ViT 做适配。
七、从静态到动态 — 视频怎么处理?
静态图像的问题已经基本解决了。但现实中很多重要的视觉信息是动态的——视频、超声、DSA 造影序列。
核心挑战:时间维度
静态图像: 一帧 → 196 个 token → 送入 LLM
视频: T 帧 → T × 196 个 token → 送入 LLM?
如果 T = 8 帧: 8 × 196 = 1,568 个视觉 token
如果 T = 32 帧: 32 × 196 = 6,272 个视觉 token
如果 T = 1 秒 (24fps): 24 × 196 = 4,704 个视觉 token
LLM 的上下文窗口通常是 4K-128K 个 token。
视觉 token 太多会挤占文本空间,也会让 Attention 的计算量暴增
(Attention 的计算量和序列长度的平方成正比)。
三种处理方案
方案 1:均匀抽帧
从视频中均匀抽取 N 帧(比如 8 帧)
每帧独立通过视觉编码器 → 8 × 196 = 1568 个 token
(可选)每帧做 token 压缩 → 8 × 64 = 512 个 token
拼接后送入 LLM
优点: 简单,复用静态图像的全部技术
缺点: 丢失了帧间的连续性,可能遗漏关键动作
方案 2:时序 Attention
每帧独立编码后,加一层时序 Attention:
帧 1 的 token 可以 attend to 帧 2, 3, ... 的 token
→ 建模帧间的变化(运动、变化、因果关系)
优点: 保留了时间信息
缺点: token 数翻倍增长,计算量大
方案 3:3D 编码器(视频原生)
用 3D 卷积或 Video Transformer 直接处理 T×H×W 的视频张量
从一开始就在时间和空间上联合建模
优点: 时空信息保留最好
缺点: 计算量大,预训练模型较少
当前的前沿
视频理解仍然是一个活跃的前沿研究方向。 尤其是长视频(几分钟到几小时)的理解,还远未解决。
动态影像序列的特殊性
医学中的 DSA 造影、超声视频等动态影像序列,和一般视频有关键的不同:
一般视频:
- 场景可能变化(切镜头、新场景)
- 时间跨度长(分钟到小时)
- 关注"发生了什么事"
动态影像序列:
- 场景固定(同一个器官/血管)
- 时间跨度短(几秒到几十秒)
- 关注"变化的模式"(造影剂如何流动、血管如何显影)
- 时间分辨率要求极高(帧间的微小变化很重要)
这意味着一般的抽帧方案可能不够——因为关键信息可能就在相邻两帧的微小差异中。这是多模态 LLM 在专业领域落地时面临的真正挑战。
八、语音 — 和图像一样的演化路径
图像的多模态处理讲完了,那语音呢?你和 ChatGPT 语音对话时,它是先把你的话转成文字、再处理文字吗?
答案是:早期确实如此,但现在不一定了。
管道式:语音 → 文字 → LLM
用户说话
↓
Whisper(语音识别模型)→ "今天天气怎么样"(文字)
↓
LLM 处理文字 → 生成回答文字
↓
TTS(文字转语音)→ 播放语音
LLM 从头到尾只处理了文字。语音只是"输入输出的壳"。
早期 ChatGPT 的语音模式就是这样。问题在于:信息在语音→文字的转换中丢失了——语气、情感、停顿、口音、犹豫,全部被扔掉了。LLM 听不到你声音里的焦虑或兴奋。
原生式:语音信号 → 音频 token → 直接进 LLM
GPT-4o 的 "o" 是 "omni"(全能),它处理语音的方式和处理图像的思路完全一样:
图像: 像素矩阵 → ViT 切 patch → 视觉 token → 进入 LLM
语音: 音频波形 → 音频编码器 → 音频 token → 进入 LLM
语音的具体过程:
1. 音频波形 → 转成梅尔频谱图(mel spectrogram)
频谱图本质上是一张"图片"——横轴时间,纵轴频率,颜色是能量
2. 频谱图 → 音频编码器 → 输出一组音频特征向量
3. 音频向量 → 对齐/投射 → 音频 token
4. 音频 token + 文本 token → 一起送入 Transformer LLM
LLM 直接"听到"了声音的特征,不需要先转成文字。 这就是为什么 GPT-4o 能听出你的情绪、能实时打断、能模仿不同语气——因为声学信息没有在中间被丢弃。
演化模式完全平行
图像: CNN独立处理 → CLIP对齐 → ViT token 进入 LLM
语音: Whisper独立转文字 → 音频编码器对齐 → 音频 token 进入 LLM
视频: 逐帧独立处理 → 时序压缩 → 视频 token 进入 LLM
每种模态都在走同一条路:从"专用工具做预处理"到"直接变成 token 进入 Transformer"。
九、全景视角 — 多模态 AI 的三级光谱
讲了这么多具体技术,让我们退一步看全局。
Google Research 在一篇关于多模态医学 AI 的博文中,提出了一个有用的分类框架:多模态 AI 的实现方式不是只有一种,而是一个从松耦合到紧耦合的光谱。
Tool Use Model Grafting Generalist
(工具调用) (模型嫁接) (通才系统)
────────────────────────────────────────────────────────────→
松耦合/高模块化 中间路线 紧耦合/高整合
Tool Use — LLM 调用专业工具
用户: "请分析这张X光片"
→ LLM 识别到需要图像分析
→ 调用独立的放射学 AI 系统(通过 API)
→ API 返回文字报告:"右肺中叶见一 8mm 结节"
→ LLM 把报告整合进回答
LLM 自己不"看"图,而是把图交给专家处理。
类似于:LLM 调用计算器做数学题,而不是自己算。
优点:每个子系统可以独立开发、独立验证、独立拿监管认证。对医疗等高监管领域非常重要——你可以单独验证放射学 AI 的准确率,不用担心 LLM 的干扰。
缺点:信息在传递中被"窄化"了。视觉系统返回的是文字结论,LLM 看不到原始图像特征。就像请专科会诊只收到一页会诊报告,而不是亲自看片子。
Model Grafting — 模型嫁接
这就是本文前面讲的 LLaVA 三段式架构。
图像 → 视觉编码器 → 对齐层(adapter) → LLM
Google 把它叫"嫁接"(grafting)——把一棵树(视觉模型)
的枝条嫁接到另一棵树(LLM)上。比喻很贴切。
Google 的 ELIXR 系统用了这个方案做胸部X光分析——用预训练的胸部X光基础模型作为视觉编码器,通过 "medical information adapter" 接入 LLM。他们发现一个有趣的现象:模型出现了涌现能力——语义搜索和视觉问答能力是"自动出现"的,不是专门训练的。
优点:视觉信息以向量形式直接进入 LLM,信息保留更完整。训练成本可控——只需要训练 adapter 层。
缺点:视觉编码器和 LLM 毕竟是分别训练的,融合的深度有限。
Generalist — 通才系统
所有模态从训练第一天起就在同一个模型中联合训练。
Google 的 Med-PaLM M:
文本/表格 → 文本编码器 ──┐
X光/心电图/病理切片/ ├─→ 统一的 Transformer → 输出
肺活量图 → 视觉编码器 ──┘
同一套权重处理所有任务。
优点:融合最深,理论上效果最好。
缺点:只有顶级实验室有资源做这种端到端训练。而且对于医疗监管来说,一个"什么都做"的黑箱比独立的专用系统更难获得认证。
三者之间怎么选?
Tool Use: 最适合监管严格、需要可追溯性的场景(如临床诊断)
Grafting: 最适合需要跨模态理解、且有领域数据做微调的场景
Generalist: 最适合通用场景、且有海量数据和算力的大厂
对于专业领域的团队来说,Model Grafting 通常是最务实的选择:
- 不需要从头训练(用开源 LLM + 预训练视觉编码器)
- 只需要训练 adapter + 微调(算力可控)
- 可以灵活替换视觉编码器或 LLM
- 有足够的论文和开源代码可以参考
Google 在那篇文章中诚实地说:"哪种方式最好,取决于大量尚未评估的因素。" 这是一个务实的立场——不是哪种架构更"先进"的问题,而是哪种更适合你的场景。
十、边界与思考
多模态幻觉 — 模型"看见"了不存在的东西
多模态 LLM 继承了文本 LLM 的幻觉问题,而且可能更严重:
文本幻觉: 模型编造一个事实
视觉幻觉: 模型声称看到了图中不存在的东西
例如:
图中有一只猫坐在桌上
模型回答: "图中有一只猫和一只狗坐在桌上"
→ 狗是幻觉出来的
为什么会这样?
1. LLM 的先验知识太强——它"知道"猫和狗经常一起出现
2. 视觉信息在传递过程中被压缩/丢失
3. 对齐模块的映射不够精确
这在专业领域尤其危险——模型可能在影像中"看到"一个不存在的病灶。
细粒度理解的局限
当前多模态 LLM 在以下任务上仍然不稳定:
✗ 精确计数: "图里有几个人?" → 经常出错
✗ 空间关系: "A 在 B 的左边还是右边?" → 不可靠
✗ 细小文字: 读取图中的小字 → 容易遗漏
✗ 遮挡物体: 被部分遮挡的物体 → 识别困难
这些局限来自 ViT 的 patch 机制——16×16 像素的 patch 可能把关键细节"切断"或模糊。高分辨率方案(如动态分辨率)正在改善这个问题,但还没有根本解决。
回到柏拉图洞穴
在 Embedding 文章的结尾,我们提到了柏拉图表示假说:
所有影子来自同一个"真实"。足够好的 Embedding 空间,就是对那个"真实"的逼近。
多模态 LLM 的架构印证了这个思想:
文字 "苹果"
照片 苹果照片 → 经过各自的编码器 → 在 LLM 内部的同一个
声音 咬苹果的声音 Embedding 空间中 → 汇聚成同一个概念
↓
LLM 用这个统一的表示做推理
Transformer 的 Attention 机制不区分模态——对它来说,来自文字的 token 和来自图像的 token,都只是"一个向量"。Attention 计算的是向量之间的相关性,不关心向量的来源。
这意味着,多模态不是给 LLM "加装"了视觉能力,而是让不同的感知通道共享了同一个推理引擎。就像人类不是用一个大脑做思考、另一个大脑做视觉——而是视觉信息和语言信息在同一个神经网络中融合处理。
当然,人类大脑的多模态整合远比当前的 AI 复杂得多。AI 的"融合"还停留在向量空间的对齐层面,而人类的感知融合涉及时间整合、空间整合、情感整合、记忆整合等多个层次。
但方向是对的:不同的入口,同一个空间,同一个推理引擎。
一个诚实的补充:拼接式 vs 原生多模态
本文讲的是 LLaVA 式的"拼接"架构——先分别训好视觉编码器和 LLM,再用对齐层把它们"接"起来。这是开源界最主流、最清晰的方案。
但 GPT-4o、Claude、Gemini 这些闭源模型,很可能用的不是这种架构。
拼接式(LLaVA、开源模型):
分别训好视觉编码器和 LLM → 用对齐层"接线"
优点: 简单、便宜、开源可复现
缺点: 视觉和语言的融合深度有限
原生多模态(GPT-4o、Gemini):
从训练第一天起,视觉和语言就在同一个模型里联合训练
不需要独立的"对齐层",融合更深
优点: 理论上视觉理解更强
缺点: 训练成本极高,架构细节不公开
GPT-4o 的 "o" 就是 "omni"(全能),OpenAI 明确说它是原生多模态。Gemini 也是从头联合训练视觉和语言的。它们的内部架构和本文讲的 LLaVA 有本质区别——但具体怎么做的,谁也没见过。
那本文讲的还有意义吗?有,而且很大。
第一,原理是对的。不管是拼接式还是原生式,核心思想都是"把图像变成 token,和文字一起用 Attention 处理"。差异在工程实现,不在原理。
第二,LLaVA 是可验证的。它完全开源——代码、权重、论文都公开,你可以亲手验证每一步。GPT-4o 的架构只能猜。
第三,对专业领域应用来说,拼接式恰恰是最实用的。因为你不可能从头训练一个 GPT-4o,但你完全可以用 LLaVA 的方法,在开源模型上做领域微调。
就像学开车:教练车是手动挡,和你以后开的自动挡不完全一样。但方向盘、油门、刹车的原理是相通的。先理解手动挡,再开自动挡就很容易了。
**一句话记住:** 多模态 LLM = 视觉编码器(把图变成 token)+ 对齐模块(翻译成 LLM 的语言)+ LLM(统一做推理)。**Transformer 不挑食——文字、图像、视频,进来都是向量,用同一套 Attention 处理。**
参考文献
Dosovitskiy, A. et al. (2020). An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. ICLR 2021. Radford, A. et al. (2021). Learning Transferable Visual Models From Natural Language Supervision (CLIP). ICML. Liu, H. et al. (2023). Visual Instruction Tuning (LLaVA). NeurIPS. Li, J. et al. (2023). BLIP-2: Bootstrapping Language-Image Pre-training with Frozen Image Encoders and Large Language Models. ICML. Girdhar, R. et al. (2023). ImageBind: One Embedding Space To Bind Them All. CVPR. Huh, M. & Isola, P. (2024). The Platonic Representation Hypothesis. ICML. Liu, H. et al. (2024). LLaVA-NeXT: Improved Reasoning, OCR, and World Knowledge.
本文首发于「AI 学习笔记」博客:https://Jason-Azure.github.io/ai-blog/
微信公众号:AI-lab学习笔记
延伸阅读:当数字学会了远近亲疏——Embedding · Attention 机制零基础拆解 · 从语言本质到 QKV 设计
本文首发于「AI 学习笔记」博客
微信公众号:AI-lab学习笔记
