 夜雨聆风
夜雨聆风▼ 做您定制的类似分析,请与刘老师联系。
不做实验,也能发IF10+SCI?正在悄悄流行的文献计量分析,不仅是“论文捷径”,更是“基金申请外挂”!
引言
自达芬奇手术系统问世以来,机器人手术已深刻改变外科实践,其中胸外科是发展最快的应用领域之一。这一进步建立在20世纪90年代从开胸手术向胸腔镜手术(VATS)转变的基础上,该转变奠定了微创胸外科的初步标准。近年来研究表明,机器人辅助手术(RATS)能够有效解决传统胸外科中的技术难题,如操作空间受限、器械灵活性不足、人体工学限制以及视野受限等问题。RATS系统提供三维视野、更高自由度、消除手抖及更高的手术精度,使复杂手术能够通过微创方式完成。
RATS的临床应用已从最初的可行性研究扩展至多种胸部疾病,包括肺切除、食管手术、纵隔肿瘤切除以及新兴的诊断应用。随着全球医疗机构的广泛应用,RATS已从实验技术逐步发展为大型医疗中心的常规临床实践。研究RATS的发展模式不仅具有学术价值,还可为手术培训、技术引进及患者管理提供重要依据。
尽管相关研究不断增加,但RATS领域仍存在研究分散的问题。单中心研究和局部综述难以全面反映全球研究趋势、合作网络及知识演变。由于RATS涉及外科、机器人技术、人工智能及医学影像等多学科交叉,有必要通过文献计量分析系统揭示其研究结构和发展趋势。
文献计量分析是一种通过统计分析文献数据来研究科研模式、知识结构和发展趋势的方法,能够系统评估发文情况、合作网络、引用关系及主题演化。然而,目前仍存在一些不足:(1)现有研究时间跨度不足或分析不全面;(2)缺乏将研究热点与临床实践相结合的系统分析;(3)未充分涵盖人工智能及机器人支气管镜等新兴方向;(4)缺乏对研究分布与全球医疗资源差异关系的探讨。此外,随着AI在外科中的应用增加,遵循如TITAN等报告规范对提高研究质量尤为重要。
因此,本研究旨在:(1)分析RATS的全球发文趋势及发展阶段;(2)构建国际合作网络并识别主要国家、机构和学者;(3)通过关键词分析研究热点及演变趋势;(4)利用突发引用分析识别前沿方向;(5)为未来研究重点和临床应用提供依据(见图1)。
该文2025年发表于International Journal of surgery,2024年JCR影响因子:约 10.1,JCR分区Q1!

▼ 想发表自己的文献计量分析论文?点击👇获得更多高质量文献计量分析模板。

(👆经典文献计量分析模板,持续更新中)
以下分为多个方面进行解读。
一. 主要方法
1. 数据库选择、检索策略与文献筛选过程
本研究在PubMed、Web of Science核心合集(WoSCC)和Scopus三个数据库中进行系统检索,时间范围为2000年1月1日至2025年8月31日。检索字段包括标题、摘要及关键词。
初步共获得13,143条记录,去重后剩余3986篇。进一步筛选文献类型及相关性后,排除不符合标准的文献961篇,最终纳入3025篇文献,其中包括2569篇研究论文和456篇综述论文。
2. 纳入与排除标准
纳入标准:(1)2000–2025年发表的原始研究或综述;(2)明确研究机器人辅助胸腔镜手术(RATS)的文献。
排除标准:(1)会议摘要、社论、信件等非正式文献类型;(2)与RATS相关性较低的研究;(3)非英文文献。
3. 文献计量分析方法
本研究采用三种工具进行分析:
- VOSviewer(1.6.19)
:用于构建合作网络、共被引分析及关键词共现网络,节点大小表示发文量,颜色表示不同研究集群。 - CiteSpace(6.2.R3)
:用于双图叠加分析及突发引用检测,识别研究前沿。 - Biblioshiny(R语言bibliometrix)
:用于展示全球发文分布、合作网络及研究主题演化。
4. 数据分析与可视化
采用Excel 2021分析发文趋势、引用情况及合作关系。
通过卡方检验比较不同阶段(2000–2010、2011–2015、2016–2025)关键词分布差异(P<0.05为显著)。
同时,对高被引文献进行人工分类,并依据循证医学标准评估研究质量。采用多项式回归预测未来研究趋势。
所有图表均进行标准化处理,以保证结果清晰一致。
二. 主要结果
1. 发文数量的定量分析
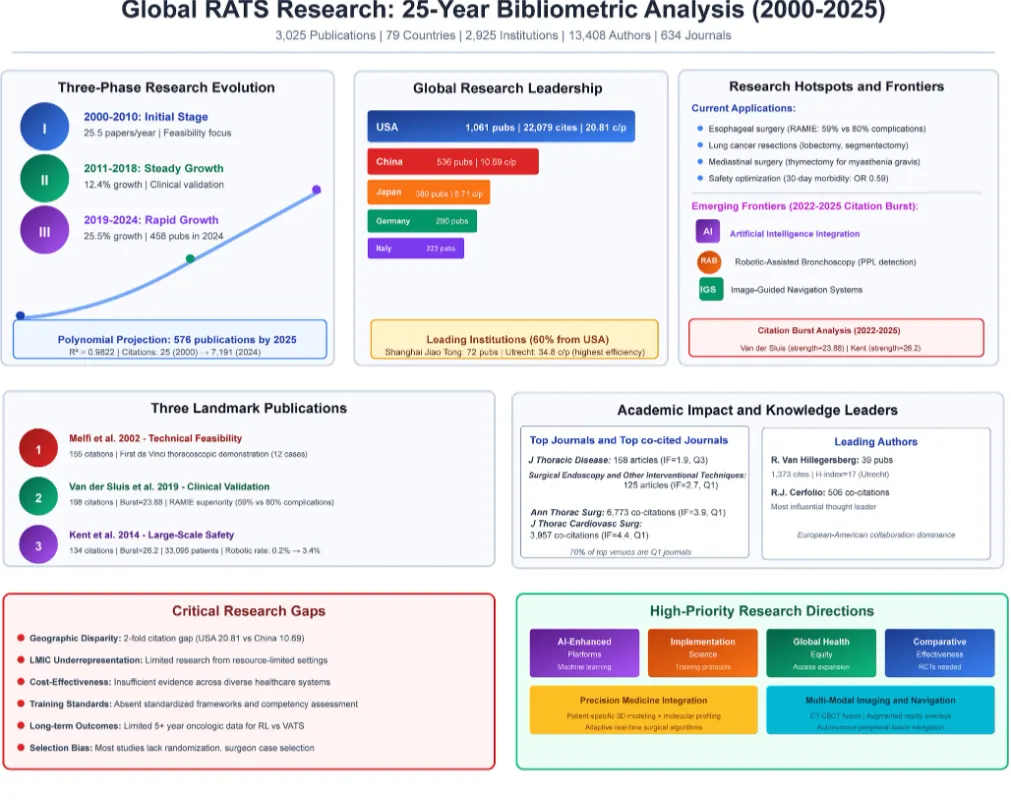
本研究共分析了3025篇RATS相关文献,涉及79个国家、2925家机构、13,408名作者和634种期刊。
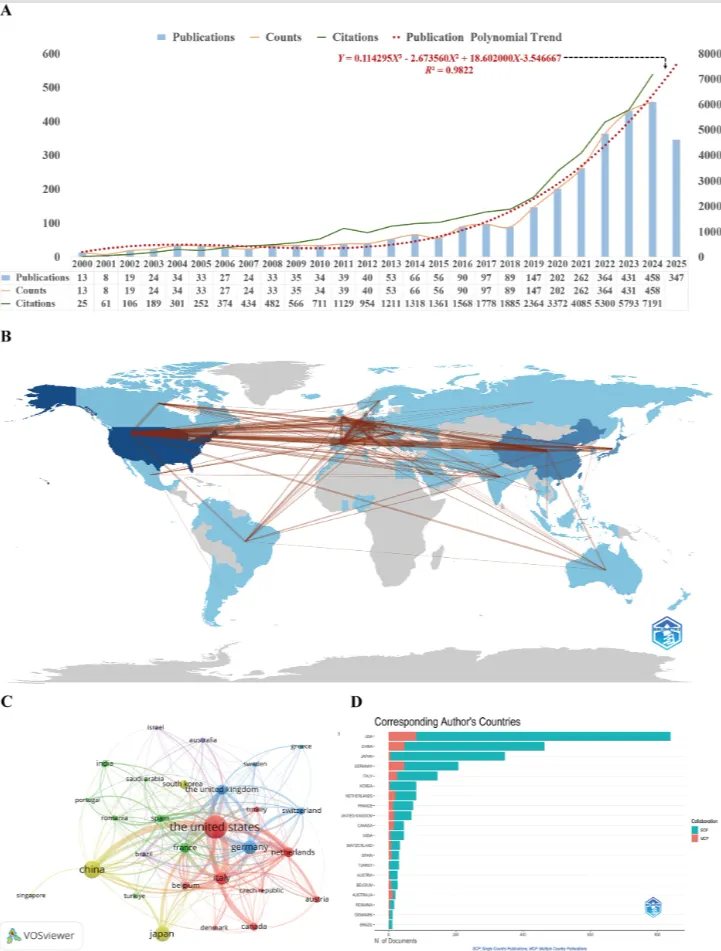
发文趋势呈现三个阶段(图2A):
初始阶段(2000–2010年):年均25.5篇 稳定增长阶段(2011–2018年):年增长率12.4%,由39篇增至89篇 快速增长阶段(2019–2024年):年增长率25.5%,最高达458篇
多项式趋势预测(R² = 0.9822)显示,2025年发文量预计将达到576篇。
同时,文献引用量从2000年的25次增长至2024年的7191次,呈指数增长趋势,表明该领域学术影响力持续提升。
2. 国家与机构分析
美国在该领域占据主导地位,共发表1061篇论文,总被引22,079次(篇均20.81次);中国以536篇位居第二,但篇均被引较低(10.69次),约为美国的一半。
欧洲国家虽发文量较少,但引用影响力较高,如荷兰(25.40)、德国(18.51)和意大利(19.13)。这反映出机器人手术对技术和资金要求较高,早期应用国家具有明显优势。
在机构层面,上海交通大学发文量最高(72篇,1175次引用),而乌得勒支大学医学中心在影响力方面表现最佳(64篇,2229次引用,篇均34.8次)。
美国机构占据主要地位(约60%),包括梅奥诊所、纪念斯隆凯特琳癌症中心、哈佛医学院和匹兹堡大学,篇均引用在14.9–26.5之间。欧洲机构(如乌得勒支大学、德国美因茨大学和米兰大学)虽发文量较少,但具有较高学术影响力。
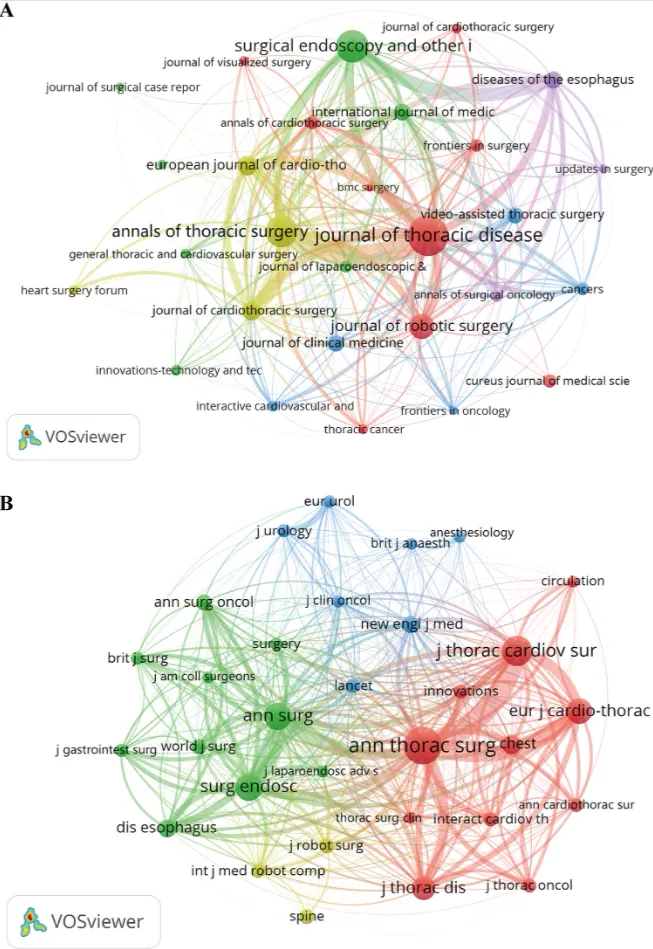
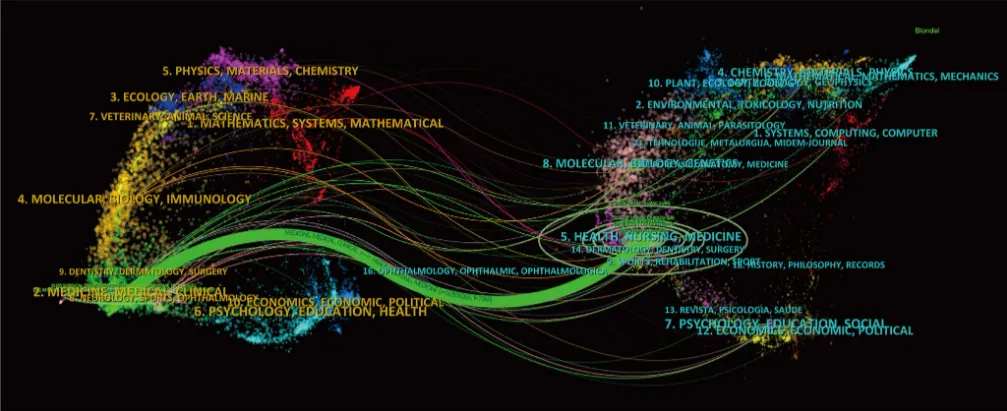
3. 核心期刊与共被引期刊分析
RATS相关研究主要发表于专业及综合外科期刊。《Journal of Thoracic Disease》发文量最高(168篇,IF=1.9,Q3),而高影响力期刊在引用方面表现更突出,如《Journal of Thoracic and Cardiovascular Surgery》(IF=4.4,Q1,3238次引用)和《Annals of Thoracic Surgery》(IF=3.9,Q1,5291次引用)。
前10期刊中约70%为Q1期刊,说明该领域已逐步成熟,并融入主流外科研究体系。
共被引分析显示,《Annals of Thoracic Surgery》(6773次)和《Journal of Thoracic and Cardiovascular Surgery》(3957次)是主要参考来源。同时,《新英格兰医学杂志》(NEJM)和《Annals of Surgery》等高影响力综合期刊的出现,表明该领域已与更广泛的医学与外科研究深度融合。
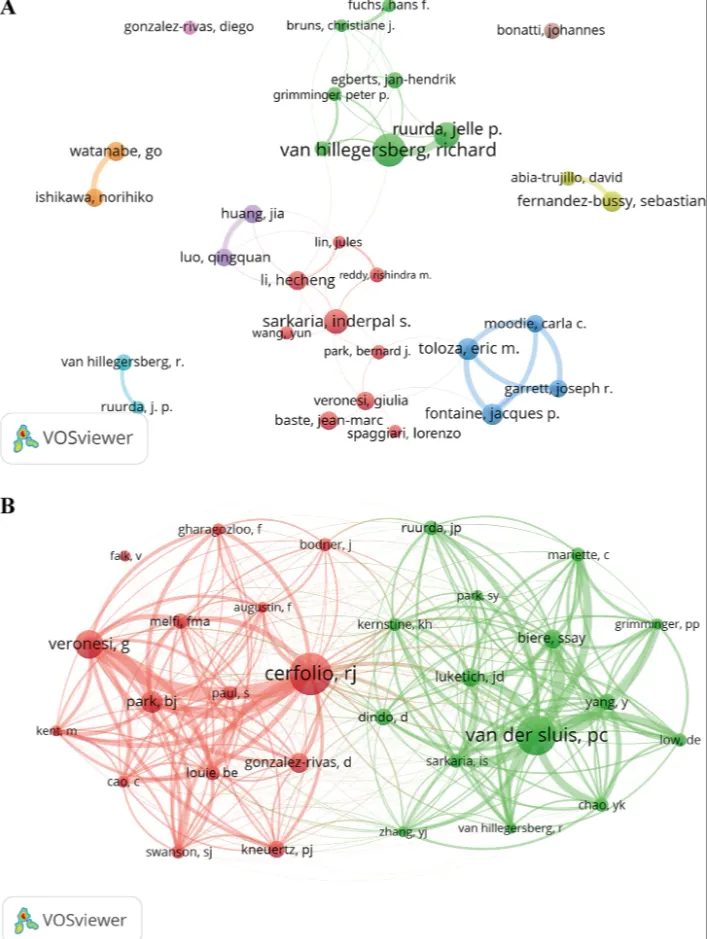
4. 核心作者与共被引作者分析
RATS领域的作者分布呈现出以欧美胸外科医生为主导的集中格局。其中,乌得勒支大学医学中心的Richard Van Hillegersberg(39篇,1373次引用,H指数17)和Jelle P. Ruurda(30篇,1186次引用,H指数15)在合作与影响力方面处于领先地位,体现了其在该领域的开创性贡献。
核心作者的发文量(22–39篇)和引用影响(151–1373次)差异较大,表明研究方向具有多样性。
亚洲学者(如中国的李鹤成、黄佳,日本的渡边刚)逐渐崭露头角,显示出国际参与度不断提升。同时,美国学者(如Inderpal S. Sarkaria、Eric M. Toloza)仍保持较高产出。
总体来看,该领域对临床经验、技术平台及长期研究投入要求较高,因此学术成果主要集中于少数高水平研究团队。
共被引分析识别出对RATS研究具有重要影响的核心学者,其中R.J. Cerfolio(506次共被引)和P.C. Van der Sluis(475次)是最具影响力的代表。
此外,G. Veronesi、B.J. Park和J.D. Luketich等传统胸外科领域的权威学者,为机器人手术的发展奠定了重要基础,体现了传统外科经验与机器人技术的融合。与此同时,D. Gonzalez-Rivas等新兴学者则代表了向更先进微创技术发展的趋势,对当前RATS临床实践具有重要推动作用。
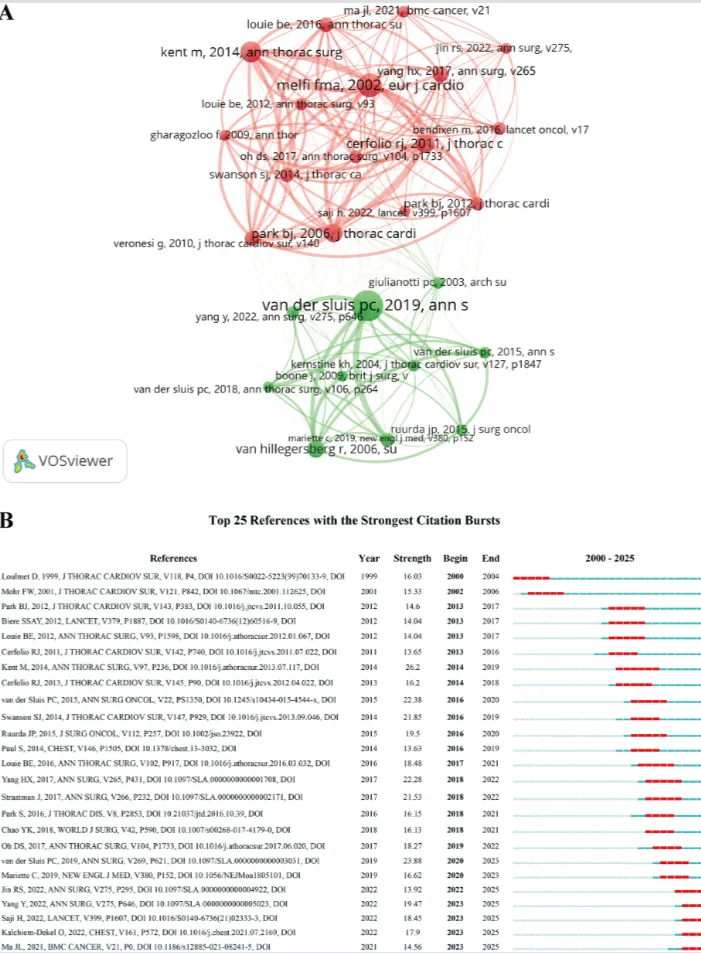
5. 高被引参考文献分析
Van der Sluis等研究的被引次数最高(198次)且突发强度最强(23.88),其次为Melfi等(155次)和Kent等(134次,突发强度26.2)。
这些研究反映了RATS发展的三个关键阶段:
- 技术验证阶段
:Melfi等首次证明达芬奇系统在胸腔镜手术中的可行性(12例) - 临床验证阶段
:Van der Sluis等研究表明机器人辅助食管切除术优于开胸手术(并发症更低、生活质量更高) - 规模验证阶段
:Kent等通过33,095例患者数据证实机器人手术的安全性,并显示其优于传统开胸手术
这些研究共同奠定了RATS全球推广的证据基础。
进一步分析显示,高被引文献以**回顾性比较研究(证据等级3)和病例系列研究(等级4)**为主,仅有一项随机对照试验(ROBOT试验,等级1),说明该领域早期高质量证据仍相对不足。
6. RATS领域的当前热点与关键主题
聚类分析显示,RATS研究主要集中在四大方向:
1)复杂胸外科手术这些方向反映了RATS从实验技术向成熟临床应用的专业化发展趋势。
此外,引用突发分析(2022–2025年)揭示了新兴研究前沿,包括:
人工智能(AI)融合 机器人支气管镜技术(RAB) 影像引导手术 外周肺病变 导航支气管镜
这些趋势表明,该领域正向精准化、智能化及诊疗一体化方向发展,同时更加重视临床效果和患者安全。
7. RATS领域的当前热点与关键主题
聚类分析显示,RATS研究主要集中在四大方向:
1)复杂胸外科手术3)纵隔手术技术应用优化与安全性评估
这些研究方向反映了RATS从早期探索逐步走向成熟临床应用后的专业细分趋势。此外,引用突发分析(2022–2025年)揭示了新的研究前沿,包括:
人工智能(AI)融合 机器人辅助支气管镜(RAB) 影像引导手术 外周肺病变 导航支气管镜
这些趋势表明,该领域正向精准化、智能化及诊疗一体化方向发展,同时更加重视临床疗效与患者安全。
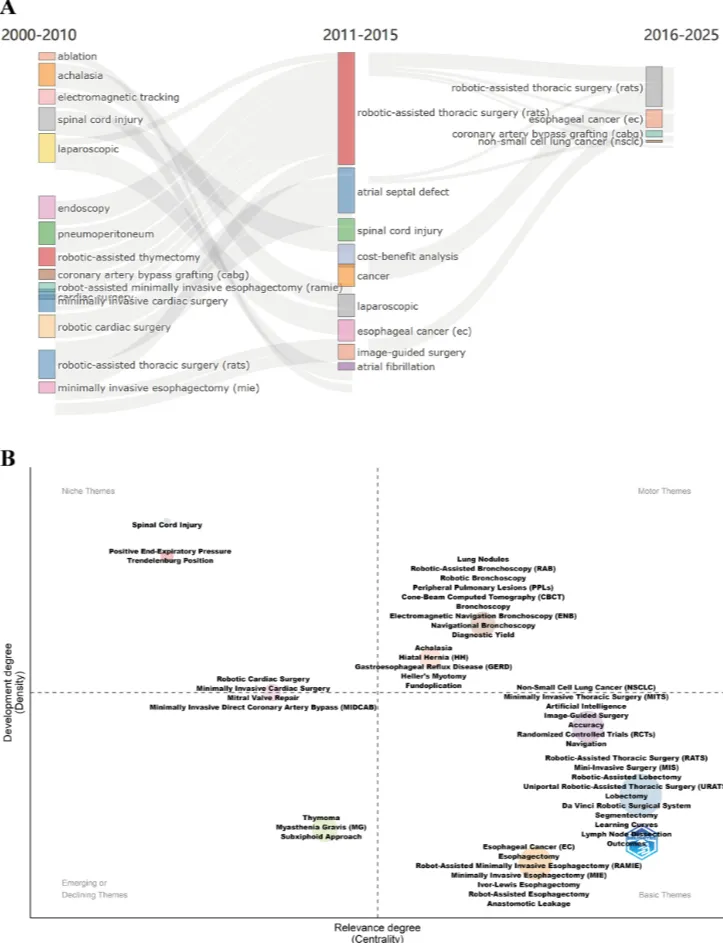
8. 主题演化与发展轨迹
主题演化分析显示,该领域经历了从技术探索到临床专科化的清晰发展过程(图8A)。统计分析结果表明,不同阶段关键词变化具有显著差异(P<0.001)。
具体而言:
“腹腔镜”“胸腔镜”等通用微创术语逐渐减少 “非小细胞肺癌”“食管癌”等疾病相关术语显著增加
这一变化表明,研究已从早期技术可行性探索转向以疾病为中心的临床应用验证。
第一阶段(2000–2010):技术起步阶段
在FDA批准(2000年)及首次RATS手术(2002年)后,研究主要集中于多领域探索,如心脏手术、冠脉搭桥、胸腺切除及食管手术等。👉 该阶段以验证技术可行性和安全性为主。
第二阶段(2011–2015):快速发展阶段
机器人肺叶切除术应用显著增加。研究逐渐聚焦肿瘤(尤其食管癌),并开始关注成本效益和技术优化。👉 标志着从技术探索向临床验证转变。
第三阶段(2016–2025):成熟应用阶段
研究高度专科化,主要集中于食管癌、非小细胞肺癌及冠脉手术。重点转向疗效比较、成本效益分析及技术创新(如单孔手术)。👉 表明RATS已发展为成熟、可推广的临床技术。
三. 讨论
1. 一般情况
本研究通过25年文献计量分析发现,RATS经历了从可行性验证→临床验证→优化应用的发展过程,但也暴露出明显的不平衡问题。
美国与中国在引用影响力上存在近2倍差距,这既反映研究质量差异,也与国际引用偏倚有关。技术资源丰富的机构形成“强者愈强”的循环,可能加剧全球不平等。此外,发文快速增长也可能体现数量导向而非质量提升。
高被引文献以中低等级证据为主,说明该领域早期主要依赖技术可行性研究。近期随机对照试验的出现表明研究正从“能否实施”转向“是否值得实施”的循证阶段。
RATS领域的主题演化与临床应用
复杂胸外科手术:食管与支气管应用(Complex thoracic resections)
机器人食管手术在淋巴结清扫、神经保护等方面优于传统胸腔镜,但成本效益和学习曲线仍是限制因素。
机器人支气管镜(RAB)作为新兴方向,可提高小病灶诊断率,并实现“诊疗一体化”,但长期疗效仍需验证。
肺切除与肺癌手术
机器人肺叶切除在围手术期效果优于开胸手术,但与胸腔镜相比优势仍存在争议。
关键问题:
长期肿瘤学效果仍需高质量研究验证 成本效益尚未明确 患者选择标准需进一步优化
纵隔手术与特殊应用
机器人胸腺切除在复杂解剖结构处理上具有优势,但现有研究缺乏统一标准和长期随访数据。
对于良性疾病,其成本效益在资源有限地区仍存在争议。
RATS在部分手术中已成为主流,显示更低并发症和更高手术精度。
但仍存在问题:
缺乏标准化培训体系 学习曲线数据主要来自大型中心 高成本限制技术普及
👉 需建立规范培训、认证体系及成本评估模型。
新兴趋势与未来方向
智能化与精准医疗
AI将成为核心发展方向,可实现:
实时决策支持 并发症预测 组织识别
未来将结合3D建模和分子信息,实现个体化手术。
先进影像与机器人支气管镜
多模态影像融合(CT+术中影像)将提高手术精度。
RAB将进一步发展,实现对小病灶的精准诊疗。
平台发展与推广策略
未来机器人系统将向多学科整合发展,并探索更微创的入路方式。
发展方向包括:
AI辅助模拟培训 远程手术指导 成本优化平台
转化价值:从研究到指南
RATS研究正逐步从单中心研究发展到多中心随机对照试验,为临床指南制定提供依据。
总体来看,RATS正向智能化、精准化和全球可及性发展,但其成功依赖于技术、临床和政策的协同推进。
编者按
本研究通过多维度文献计量分析,系统揭示了机器人辅助胸腔镜手术(RATS)在过去25年中的发展轨迹与知识结构演变。从早期技术可行性验证,到中期临床应用扩展,再到当前以精准医疗和智能化为导向的优化阶段,RATS已逐步完成从创新技术向成熟临床模式的转型。然而,研究亦清晰指出,该领域仍存在明显的地域不均衡、高等级循证证据不足以及技术推广受限等关键问题。
未来研究应重点关注以下几个方向:首先,需加强多中心、前瞻性随机对照研究,以提升证据质量并支持临床指南制定;其次,应推动人工智能与机器人技术的深度融合,实现术中实时决策支持与个体化治疗;再次,需构建标准化培训与评估体系,缩短学习曲线并保障手术安全;此外,应探索成本效益优化及可及性提升路径,缩小不同地区间的技术鸿沟。
值得强调的是,RATS的发展不应仅停留于技术革新层面,更需在临床价值、医疗公平与患者获益之间取得平衡。未来应通过跨学科合作与全球协同,推动机器人外科向更加智能化、精准化和普惠化方向发展,从而实现其在现代外科体系中的长期价值。
原文链接:
- DOI: 10.1097/JS9.0000000000004939
广而告之:
如果您也需要对自己公司的产品或者对自己研究的领域做系统梳理,可以找美国Healsan恒祥医学科技做文献计量分析。并可同时获赠五个仅Healsan™大数据才有的福利:
文献检索老师参与学员选题的文献检索; 完成分析后,免费使用SCI论文神器10天,以完成论文撰写; 作者撰写好之后,获得免费查重; 作者投稿前,获得免费的选刊服务。
(点击👆,获得持续的医学大数据分析报告)
 |  |
 |  |
 |  |
 |  |
(点击👆图片,进入自己感兴趣的专辑。或点击“资源”,浏览本公众号所有资源)
