 夜雨聆风
夜雨聆风
“光啾科技开发了全球首款深度边缘光计算AI处理器,以光子架构重塑10GHz实时算力时代
——为前沿科技与高价值产业提供超低时延、实时自适应训练的光计算解决方案”
近年来低空经济的快速发展对无人机的稳定飞行能力提出了严峻的挑战。无人机在高机动飞行、强环境风场、复杂地形近地飞行以及多机密集编队协同等复杂飞行场景下中面临高度非线性且时变的气流扰动。在以上复杂气流环境中,理想的标称动力学模型会严重失效。传统的PID、滑模控制等反馈控制策略难以补偿气流扰动带来的残差力与误差。因此学术界和工业界都在积极探索使用人工智能的手段实现无人机精确实时自适应控制的方法。
光啾科技创始团队联合上海科技大学研究团队提出使用边缘光计算AI处理器来解决在复杂飞行气流环境中的无人机的实时自适应控制难题。如图一所示,具有四层深度架构的边缘光计算AI处理器(PRC)根据无人机的传感器数据实时的预测环境扰动所带来的残差力,并通过控制器进行前馈补偿,进而实现无人机的平稳飞行。
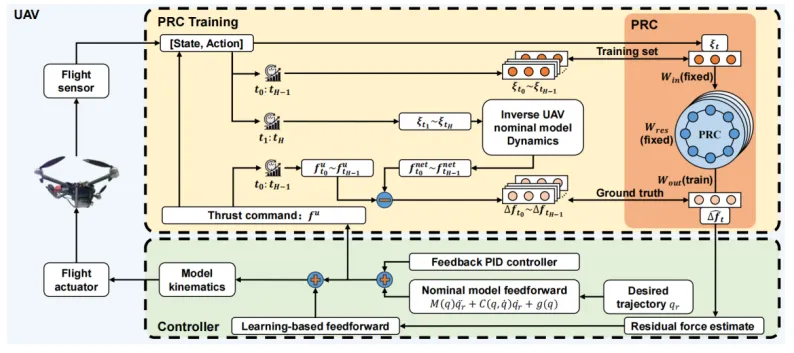
图一 基于边缘光计算AI处理器(PRC)的无人机实时自适应控制方法
研究结果表明,边缘光计算AI处理器能够精确地预测无人机在气流扰动环境中所受到的残差力(图二),其预测性能与数字域时域卷积神经网络(TCN)相当,而多层感知机(MLP)与传统模型均无法准确的预测该残差力。然而TCN训练需用时45分钟、MLP训练需用时27分钟,数字域神经网络训练耗时过长无法满足无人机在线自适应以及毫秒级实时控制的需求。作为对比,边缘光计算AI处理器训练用时小于1毫秒(图三),比数字TCN和MLP快6个数量级,满足无人机在线自适应的精确实时控制需求。
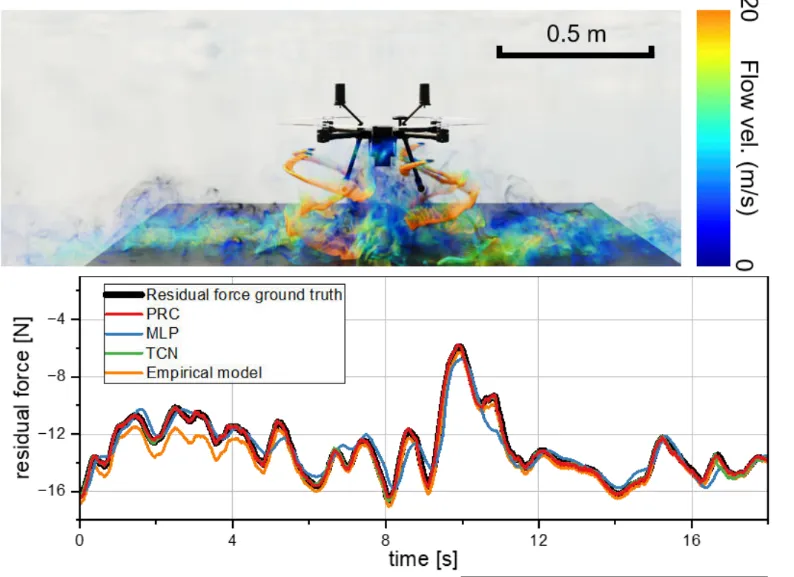
图二 边缘光计算AI处理器(PRC)与数字MLP和TCN网络的对比
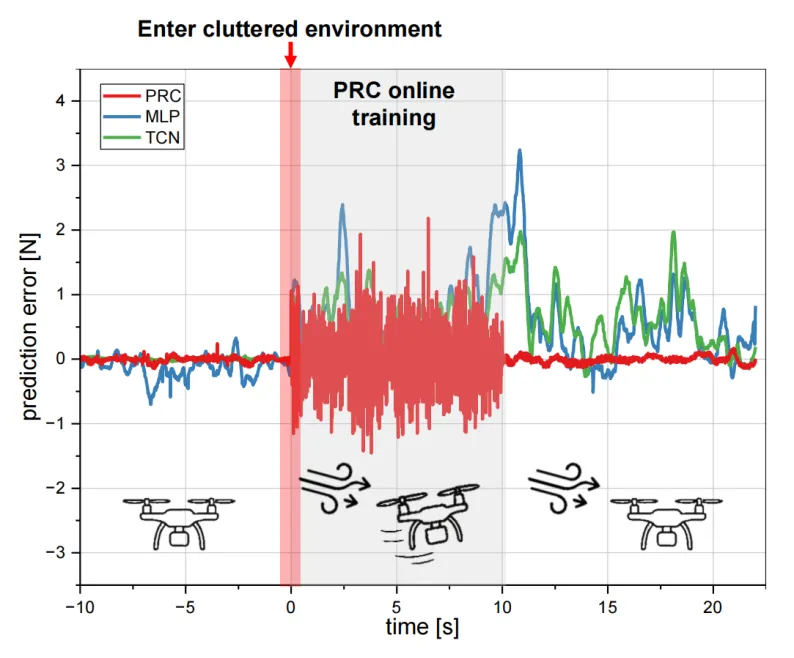
图三 边缘光计算AI处理器(PRC)的在线实时自适应功能
以上工作将于2026年6月在维也纳举办的IEEE顶会International Conference on Robotics & Automation (ICRA)进行公开口头报道。
点击文章底部左下方“阅读原文”可查看论文。
光啾科技(上海)有限公司致力于基于光子技术的天然优势重塑边缘人工智能的未来。公司开发的边缘光计算AI处理器以非冯·诺依曼架构突破传统电子计算的性能瓶颈,为各类边缘端应用场景提供超低时延、实时自适应、高速高能效的灵活算力解决方案。
