 夜雨聆风
夜雨聆风软件简介
CGO(CHC Geomatics Office软件是华测公司完全自主研发的第二代全功能后处理软件。该软件采用全新的数据解算引擎。综合性的数据处理软件涉及到的行业、产品多;支持伽利略解算、满足更大范围用户需要;支持动静态转换、满足不同场景的处理需;支持PPP解算、提供高精度的单点定位需要;道路要素数据处理、满足道路客户各种使用场景;无人机数据处理、满足无人机客户基本需要。其中UAV(无人机模块)、USV(无人船模块)为付费模块。本章节解算将讲解使用华测CGO软件中免费GNSS模块解算方法。
图61华测CGO主界面
CGO的主界面包含标题栏、菜单栏、工作空间、图层管理器、视图、属性窗口、工具窗口、输出窗口、状态栏。主要功能全部在菜单栏呈现,包括:GNSS、RTK、电力、道路、UAV、USV,六个数据处理功能,和工程、视图、工具、支持四个辅助模块。
4.2 CGO解算无人机PPK
本次数据解算所用到的数据为通用格式,各个厂家GNSS设备的产生的原始数据格式都各不相同,需要使用设备厂家的专用软件转换为通用RINEX格式。在实际使用过程中数据的转换需要咨询设备厂家。也可以借鉴本章第二节的内容实现。
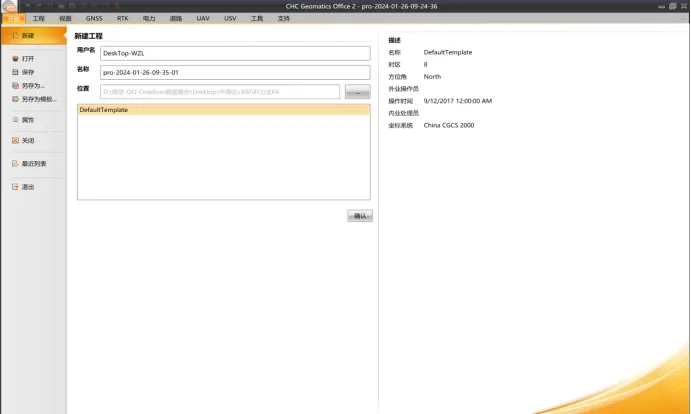
图62新建项目
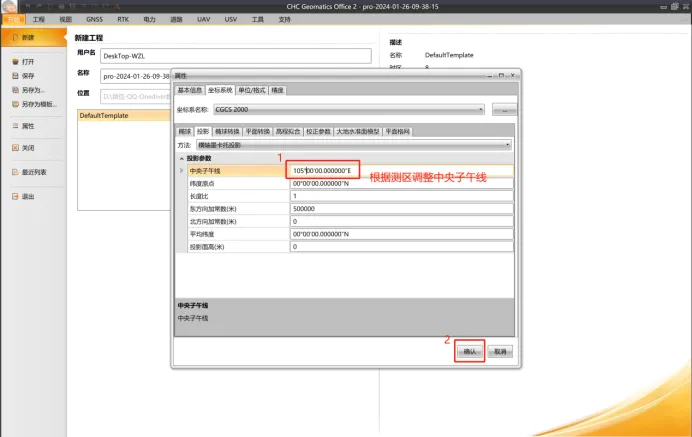
图63调整中央子午线
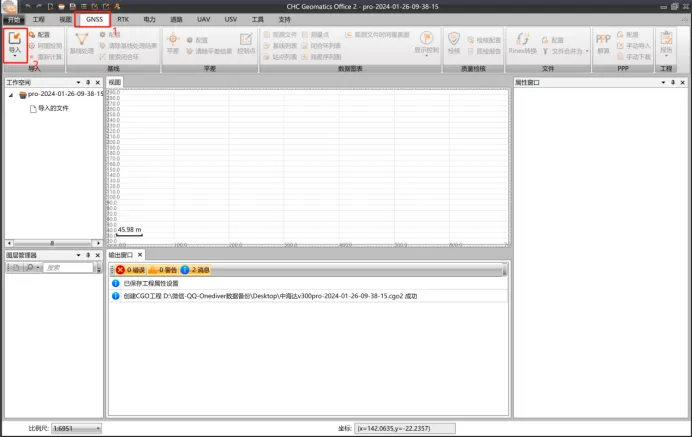
图64数据导入
数据导入过程需要导入GNSS设备的静态数据和无人机接受的历元信息,将静态数据设置为控制点,并且在控制点中要填入坐标信息,由于坐标信息直接影像解算结果,其精度要求可以参考相关规范规程要求,无人机数据设置为动态。
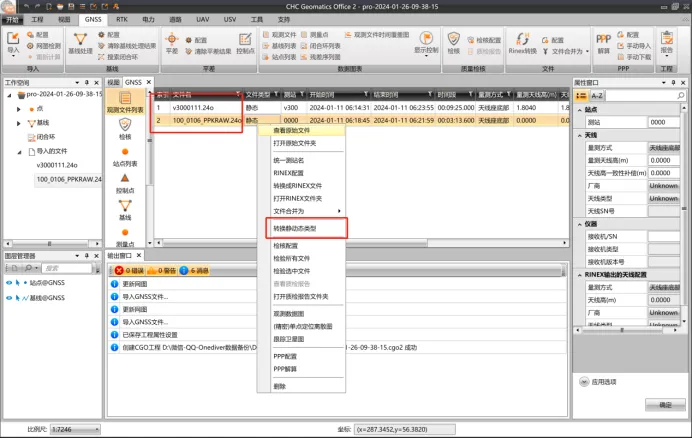
图65设置无人机航点数据为动态
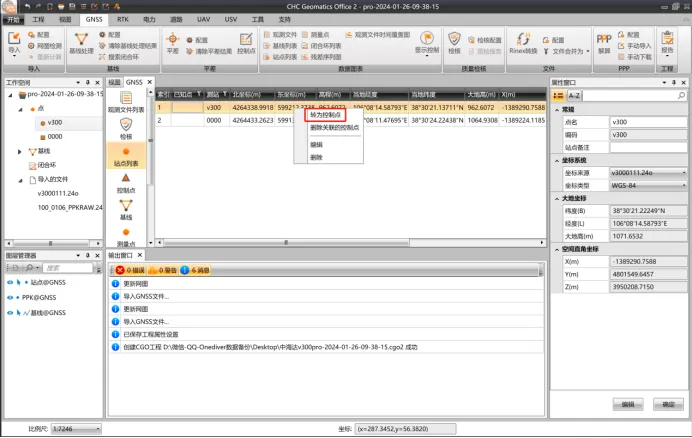
图66控制点设置
将静态数据设置为控制点。为了提高解算的精度,需要在属性中修改为用户自定义坐标,填入静态设备假设点的坐标。站点坐标需要在测量前根据项目的要求使用控制点的测量方法进行测量获得。
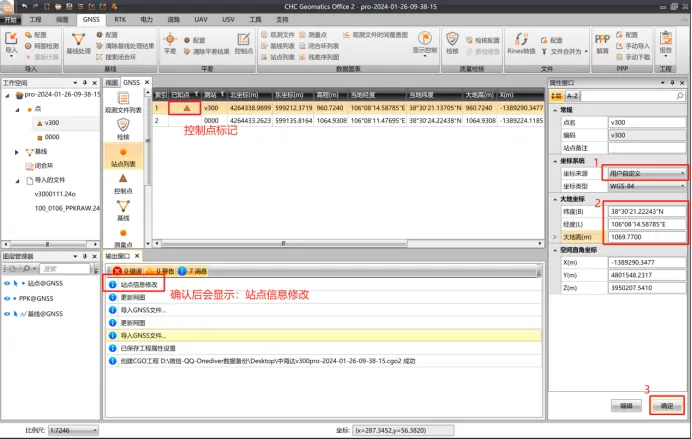
图67控制点坐标设置
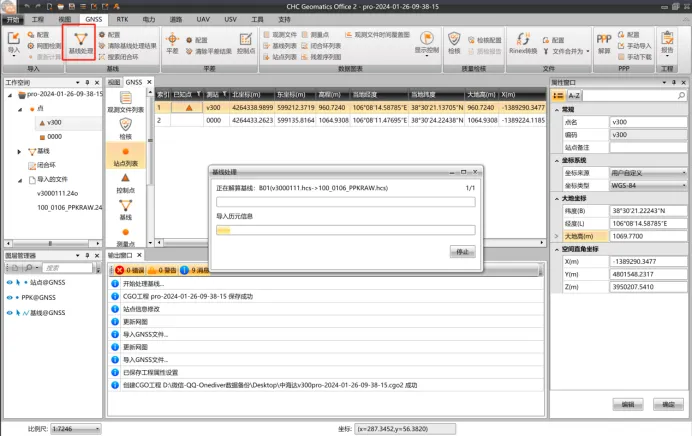
图68基线解算
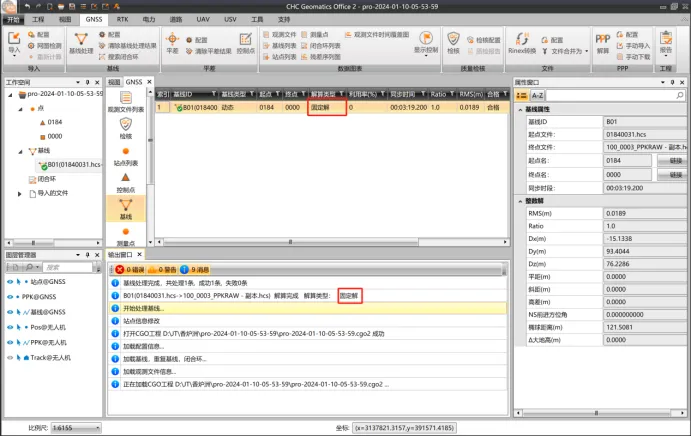
图69解算结束之后基线信息
在基线解算结束后,直接导出基线解算报告和文本文档的解算结果,从机选解算报告中可以看出各停靠点结果的状态,结果的状态分为:固定解、浮动解、单点解、伪距差分解等。由于无人机的动态观察点(历元)的时间较短(大疆精灵4RTK为0.2s)远远大于无人机航测过程中拍照的时间间隔。一般在PPK解算报告中历元固定解>95%的情况下,都可以得到照片拍照点的高精度位置信息。
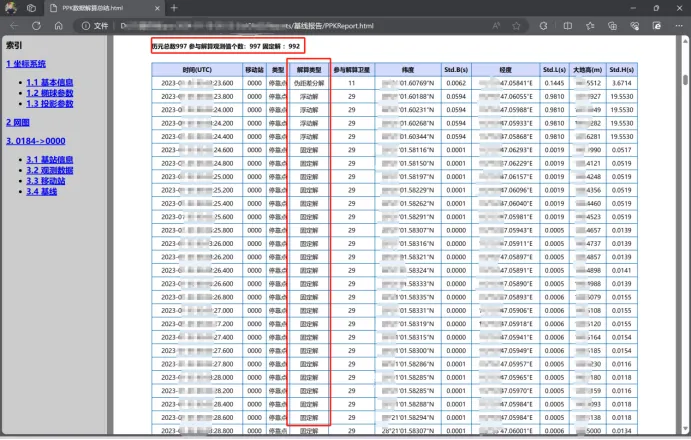
图70PPK基线解算报告
关于历元PPK解算结束之后,需要利用无人机航测过程中拍照时间点,在历元解算的结果上进行内插得到。具体方法与本章节第二节内容中是相同的,可以使用EXCEL表格处理,得到最终结果。
从历元的固定解到照片的pos数据的计算方法见前面rtklib计算结果的处理,方法和原理都一样。
