 夜雨聆风
夜雨聆风点击蓝字
关注我们
关注并星标
从此不迷路

公众号ID|计算机视觉研究院
学习群|扫码在主页获取加入方式
https://pmc.ncbi.nlm.nih.gov/articles/PMC12944408/pdf/sensors-26-01366.pdf
计算机视觉研究院专栏
Column of Computer Vision Institute
PART/1
痛点
痛点:野外实时监测,到底难在哪?
野外相机监测面临三大核心难题:
- 无效触发多:风、雨、植被晃动占满存储,90% 以上是空图。
- 网络与算力受限:偏远地区无互联网,云端推理做不到秒级响应。
- 夜间图像质量差:红外模糊、局部遮挡、运动拖影,常规 AI 识别极易出错。
尤其针对美洲狮这类高风险人兽冲突场景,必须在动物在场时就完成识别并触发干预,传统批量分析完全跟不上。
PART/2
方案
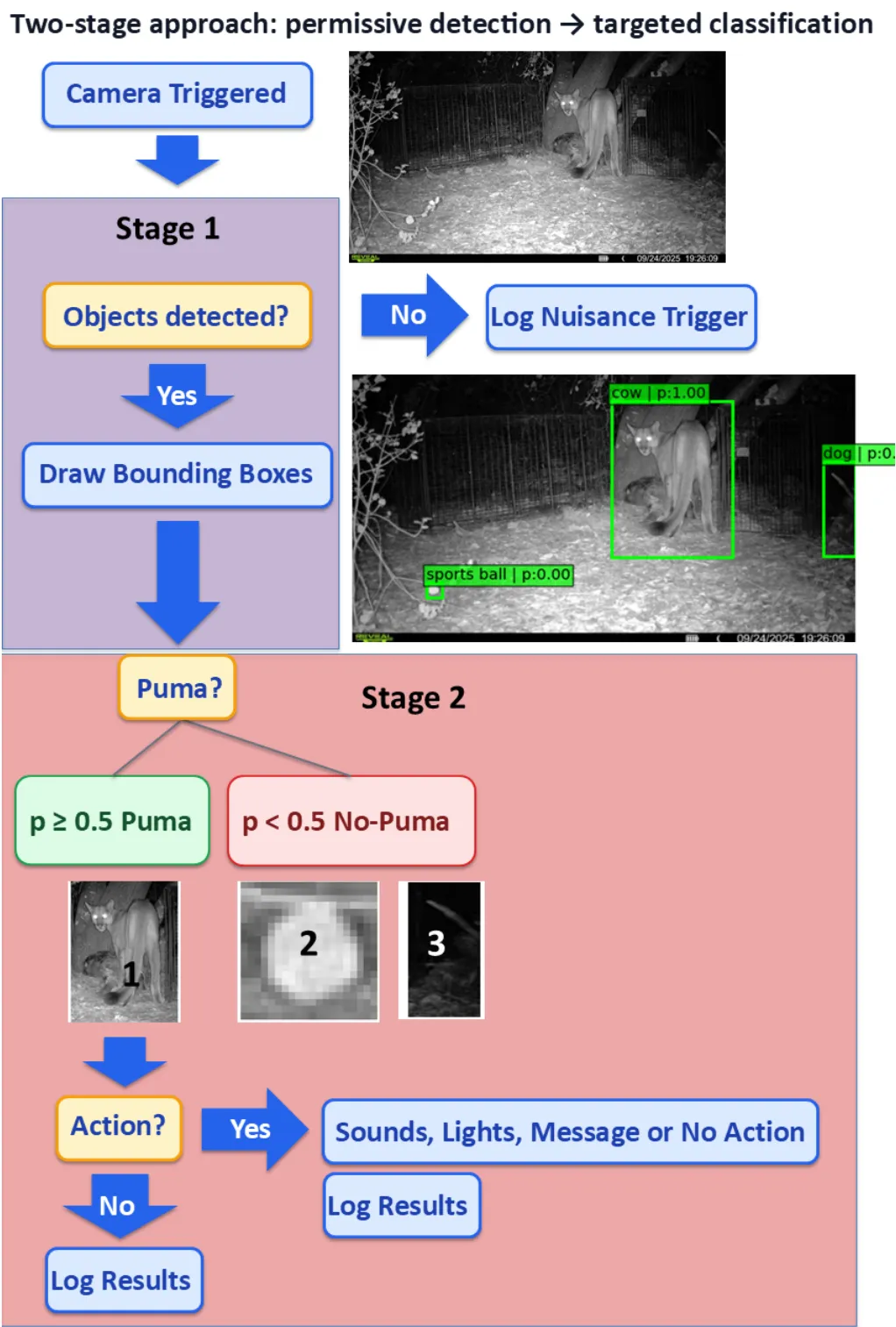
方案:两阶段 AI cascade,检测 + 分类各司其职
研究团队设计了一套离线边缘视觉传感器,用 “宽检测 + 精分类” 的两阶段 pipeline,在树莓派 5 上就能跑,全程不用网。
1. 第一阶段:YOLO 快速过滤 + 定位
模型:YOLOv8 任务:过滤空图,只保留有动物的画面;输出动物候选框,裁剪 ROI 区域。 原则:不做物种判断,只做 “宽召回” 定位,避免漏掉真实目标。
2. 第二阶段:EfficientNet 精准确认物种
模型:EfficientNetV2-S 训练:课程迁移学习(先冻主干训分类头,再全量微调) 任务:对 ROI 做二分类(是美洲狮 / 不是美洲狮),输出最终决策。
【两阶段检测 - 分类流程示意图】
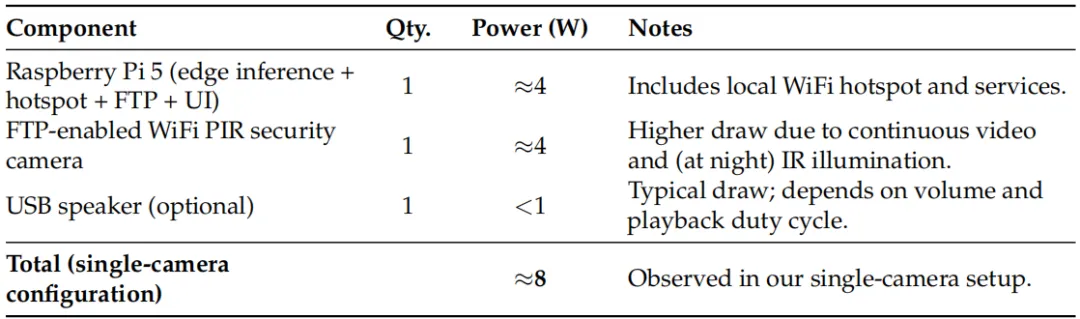
整套系统硬件极简:FTP 无线相机 + 树莓派 5+USB 音箱,单套成本约130 美元,功耗仅 8W,太阳能就能带。
【系统功耗预算表】
PART/3
效果
效果:精度近满分,端到端仅 4 秒
在1434 个独立测试事件(新墨西哥训练 + 加州测试,跨地域跨相机)上,系统表现碾压单阶段方案:
精确率:0.983 召回率:0.975 F1 分数:0.979 准确率:0.986 误报仅 8 次,漏检仅 12 次
【各方案消融实验对比结果】

速度与部署
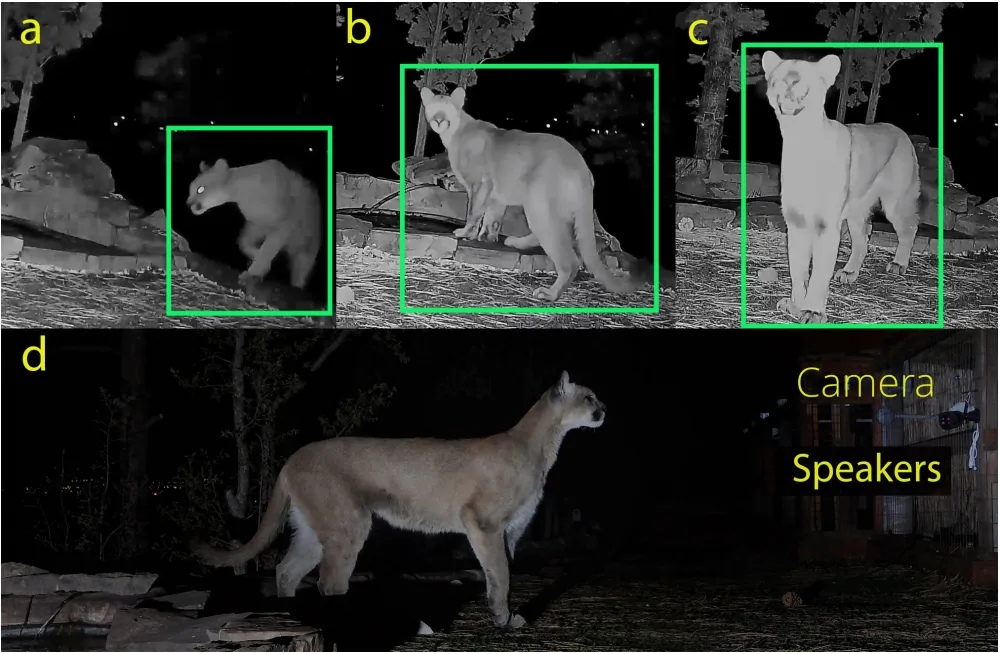
端到端延迟:约 4 秒(相机触发→图像传输→AI 推理→执行动作) 野外连续运行:自 2025 年 5 月至今稳定工作 误报率:全场 12436 次触发中,仅 98 次误报,误报率 0.8%
【野外实测美洲狮识别 + 音频驱离现场图】
PART/4
优势
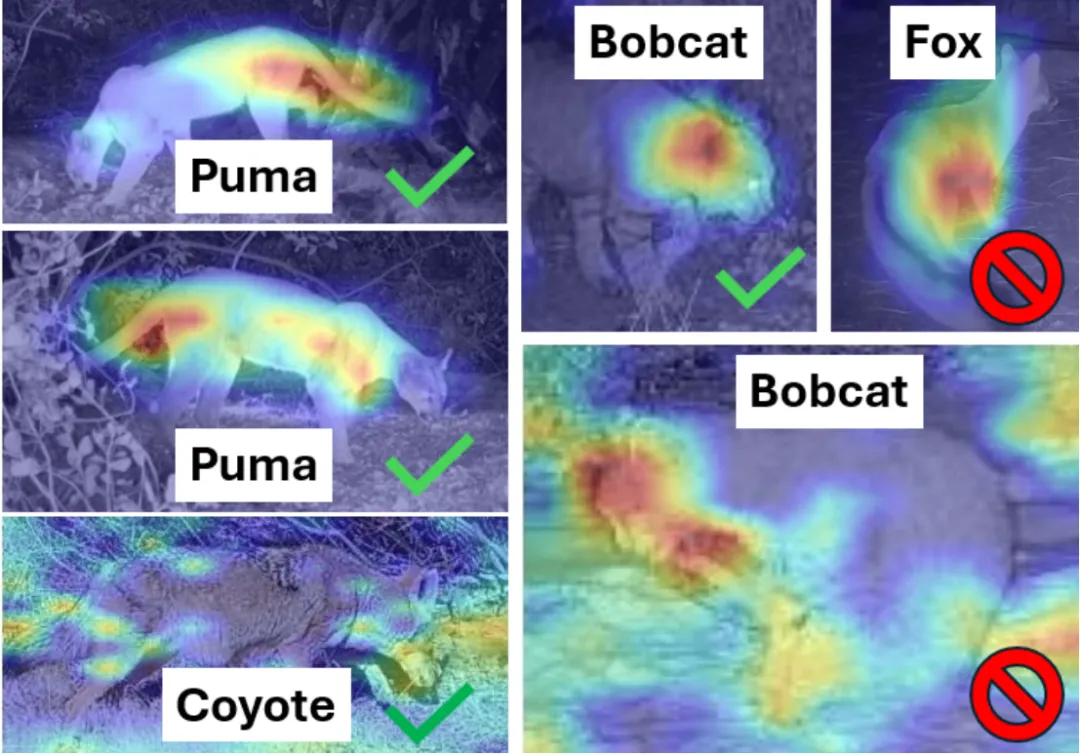
优势:可迁移、可解释、够鲁棒
PART/5
总结
这套两阶段边缘 AI 野生动物监测系统,完美解决野外无网、低算力、高误报、延迟高的痛点:
全离线运行,边缘端秒级出结果 两阶段分工,精度高、误报极低 低成本硬件,易部署、易迁移 适配昼夜红外,应对复杂野外图像
为人兽冲突预警、珍稀物种监测、生态实时保护,提供了可落地的轻量化 AI 方案。


END

转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
🔗
YOLO-TLA:一种基于 YOLOv5 的高效轻量级小目标检测模型 ViT-YOLO:基于Transformer的用于目标检测的YOLO算法 SSMA-YOLO:一种轻量级的 YOLO 模型,具备增强的特征提取与融合能力,适用于无人机航拍的船舶图像检测 LUD-YOLO:一种用于无人机的新型轻量级目标检测网络 Gold-YOLO:基于聚合与分配机制的高效目标检测器 Drone-YOLO:一种有效的无人机图像目标检测 「无人机+AI」“空中城管” 无人机+AI:光伏巡检自动化解决方案 无人机视角下多类别船舶检测及数量统计 机场项目:解决飞行物空间大小/纵横比、速度、遮挡等问题引起的实时目标检测问题 2PCNet:昼夜无监督域自适应目标检测(附原代码) YOLO-S:小目标检测的轻量级、精确的类YOLO网络 大改Yolo框架 | 能源消耗极低的目标检测新框架(附论文下载) 改进的检测算法:用于高分辨率光学遥感图像目标检测
