夜雨聆风
夜雨聆风
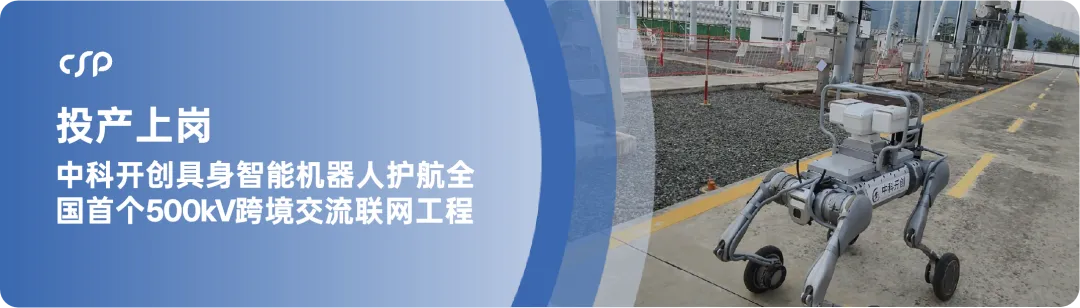
近日,中科开创自主研发的 “基于3D语义地图的智能巡操机器人及系统”,顺利通过中国信息通信研究院组织的科技成果评价,整体技术水平获评 “国际先进”。
这不仅是一项权威认定,更意味着中科开创在电力智能巡操领域实现了一次关键突破:
让机器人不再只是“会走、会看”,
而是进一步具备“看懂现场、理解任务、协同作业”的能力。
在电房、变电站、输配电线路、隧道管廊等场景中,机器人巡检早已不是新鲜事。但真正进入复杂工业现场后,难点远不止“能不能走起来”。
它还要面对:
现场空间结构复杂,设备密集;
不同区域、不同设备具有不同作业要求;
巡检任务不是固定动作,而是要根据现场情况动态调整;
多种机器人需要统一调度、协同执行;
系统既要稳定运行,还要真正服务业务闭环。
也就是说,行业真正需要的,不是一台“会移动的机器人”,
而是一套能够理解现场、规划任务、执行作业、协同联动的智能巡操系统。
中科开创此次获评“国际先进”的成果,正是围绕这一行业痛点展开。
如果说传统导航更像一张“路线图”,告诉机器人哪里能走;
那么 3D语义地图,更像是一张“带理解能力的现场认知图”。
它不仅描绘空间结构,还能够识别和理解:
设备在哪里;
哪些区域需要重点关注;
不同对象之间是什么关系;
当前任务应该如何展开。
这意味着,机器人面对复杂工业现场时,不再只是按照预设路线机械移动,而是能够在更接近真实作业逻辑的基础上,完成自主建图、自主导航和任务规划。
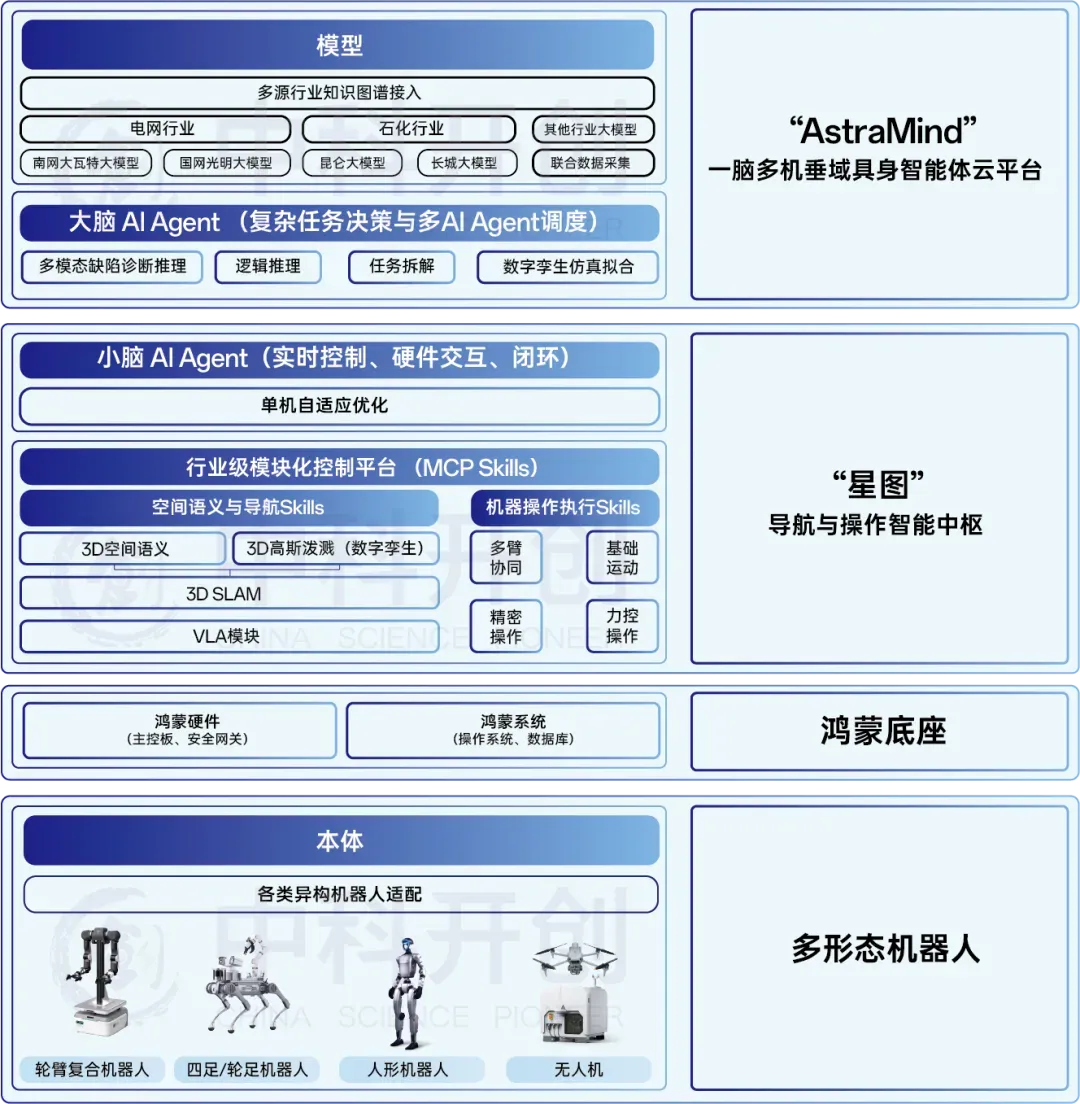
围绕这一核心能力,中科开创构建了以 3D语义导航系统 和 “一脑多机”管控平台 为支撑的智能巡操体系,形成:
具身感知 → 具身认知 → 具身决策 → 具身执行 → 具身优化的全流程闭环。
1. 从“看见环境”到“看懂现场”
系统可围绕复杂工业空间进行三维建模和语义理解,帮助机器人识别作业区域、设备对象与现场关系,提升其在非结构化环境中的自主适应能力。
2. 从“固定巡检”到“自主巡操”
机器人不再只是按照既定路线巡一遍,而是能够结合现场信息,自主完成任务规划、路径选择、异常识别与作业执行,推动智能巡检向智能巡操升级。
3. 从“单机作业”到“多机协同”
系统可适配轮式、足式、人形和无人机等多形态机器人,实现异构装备统一接入、统一调度和协同执行,让不同机器人围绕同一业务目标形成分工联动。
此次评价结果显示:
成果整体技术达到国际先进水平;
成果已实现工程化落地与规模化应用,经济社会效益突出。
这意味着,这项成果并非停留在概念验证阶段,而是已经完成从技术研发到场景应用的跨越。
目前,该系统可面向多个核心业务场景发挥作用,包括:
输电、变电、配电环节的智能巡检;
电力现场异常识别与风险预警;
带电作业辅助;
应急救援与高风险环境前置探查;
多机器人协同巡操与统一管控。
在这些场景中,中科开创推动机器人从“辅助工具”进一步走向“具备任务理解和执行能力的智能作业单元”。

“基于3D语义地图的智能巡操机器人及系统”,是中科开创多年技术积累的集中体现。
从早期二维导航,到三维语义理解;
从单机器人巡检,到多形态机器人协同;
从单点识别,到融合多模态感知、大模型语义理解、自主任务生成和异常处置的系统升级
中科开创正在构建一套更完整、更自主、更面向真实作业需求的电力智能巡操技术体系。
相关成果已完成多场景工程化验证与市场落地,也进一步夯实了公司在具身智能、3D语义导航、电力巡操系统和多机协同控制等方向的技术优势。
此次获评“国际先进”,是权威机构对中科开创技术创新能力与工程化实力的充分肯定。
面向未来,中科开创将继续深耕:
具身智能;
3D语义导航;
多机协同;
智能巡操;
自主可控与全栈信创能力建设。
公司也将加快推动相关成果在管廊隧道、各类电房、生产场站、应急救援、输配线路和基建现场六类场景,推进机器人能力的行业化适配与应用转化,赋能新型电力系统建设和新型城市基础设施升级。
让机器人真正看懂现场、理解任务、服务业务,
是中科开创持续推进智能化变革的方向。
· END ·