宫晓燕, 戴星原, 李芮霖, 等. AI交通科学家:大模型驱动的自主交通科研[J]. 智能科学与技术学报, 2026, 8(1): 33-46. Gong X Y, Dai X Y, Li R L, et al. AI transportation scientist: LLM-driven autonomous transportation research[J]. Chinese Journal of Intelligent Science and Technology, 2026, 8(1): 33-46.
0引言
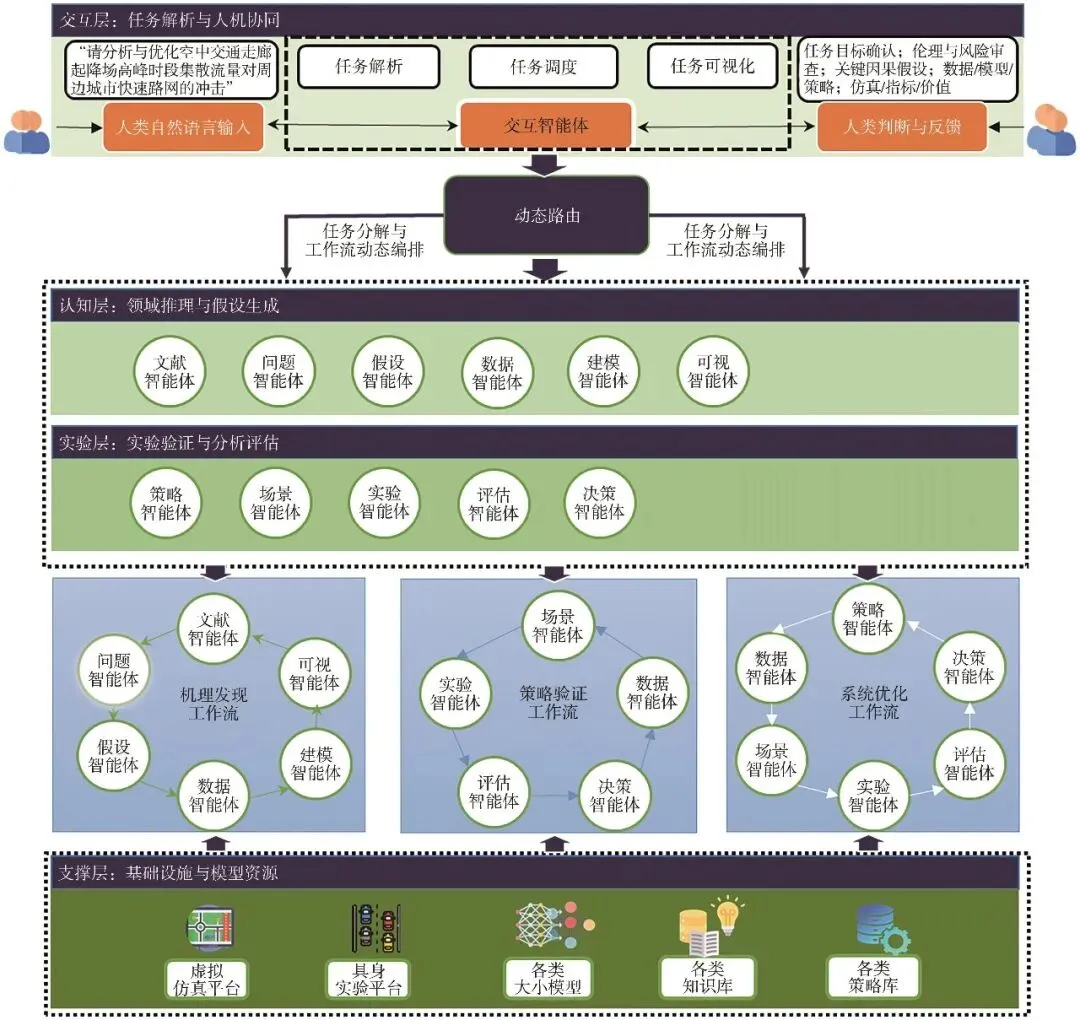
城市交通系统处于一场深刻的结构性转型之中,正从传统的物理系统加速演进为社会物理信息系统(cyber-physical-social system,CPSS)。随着无人车、无人机、路侧智能体、具身机器人以及虚拟交通员工等新型主体的持续融入,交通系统已从单一的物理流网络,转变为一个多智能体共生、跨空间耦合的复杂生态系统,呈现出多尺度、强耦合与高度时变的特征。在此类系统中,局部扰动可能被迅速放大,诱发全局性系统风险。例如,在低空无人机配送与地面高峰车流叠加的城市场景中,若空地调度算法未能及时响应气象变化或突发需求,就可能引发“空地拥塞共振”现象,导致整体交通系统瘫痪。防范此类风险,要求科研体系具备从问题发现、机理探索到技术创新的快速闭环能力,这对交通科学的研究速度与智能化水平提出了前所未有的挑战。长期以来,交通科学依赖建模、仿真与优化来揭示系统机理并制定控制策略,其研究范式正逐步从“模型驱动”向“数据驱动”再向“智能驱动”过渡。模型驱动方法基于物理方程与理论假设,但在CPSS场景下难以准确刻画异构主体之间的非线性互动与动态反馈机制;数据驱动方法则借助机器学习与神经网络技术,在预测与控制任务中取得了显著进展,但仍依赖人工提出问题与固定研究流程,缺乏自主发现问题与持续学习的能力,难以适应开放环境中知识快速演化以及人机智能共生的新需求。平行智能理论和人工社会+计算实验+平行执行(artificial society+computational experiment + parallel execution,ACP)方法为构建虚实交互的自动化和智能化研究框架提供了理论基础。大语言模型(large language model,LLM)与多智能体系统(multi-agent system,MAS)则为交通科研范式向智能驱动的转变提供了技术路径。LLM具备语义理解、因果推理与知识融合等认知能力,可作为科研流程的智能中枢;MAS则通过角色封装与协同机制,实现从问题识别、仿真推演到策略反馈的自组织与自进化流程。自驱实验室已在化学、材料等领域取得重要突破,能够通过自动化的问题发现、假设提出与实验验证推动规律与机理的发现。然而,交通科学的目标不仅在于揭示规律或机理,更在于确保形成的策略具备可执行性和可验证性。例如,在城市出行管理中,研究者可识别“短途高频通勤是拥堵主因”这一规律,但真正的挑战在于如何将其转化为可实施的差异化收费或激励策略,使其具备技术可行性和社会适应性,从而引导交通参与者出行行为的改变。为应对上述挑战,基于平行智能理论,本文提出融合大模型与多智能体技术驱动的自主交通科研框架——AI交通科学家。该框架由交互层、认知层、实验层、支撑层及动态路由组成,针对交通研究中的机理发现、策略验证与系统优化3类问题,通过动态路由组织各层智能体形成协作链路,完成不同的任务。该框架覆盖从文献分析、问题识别、假设生成、仿真验证到策略生成与反馈优化的人机协同闭环,不仅能实现问题的自动识别与解决,更能推动规律的自主发现与策略的创新、验证与持续优化。
“AI交通科学家”针对机理发现、策略验证与系统优化这3类科研问题,通过动态路由引擎自适应地编排认知层与实验层的智能体,形成3条自动化科研工作流。2.2.1机理发现类问题:探索与归纳该流程旨在探索复杂交通现象背后的内在规律与因果机制,实现从数据与知识中自动归纳生成可验证的理论假设的目标。工作流由认知层智能体驱动,核心智能体包括交互智能体、文献智能体、问题智能体、假设智能体、数据智能体、建模智能体、可视智能体。结合“城市突发拥堵形成机理发现”的例子,详细说明其工作流程。科研人员通过自然语言把“分析城市突发拥堵的形成机理”的任务输入交互智能体。交互智能体识别任务类型为机理发现,提取目标变量和期望输出。目标变量包括交通流量、气象条件、信号配时、驾驶行为等,期望输出包括机理模型、因果图谱等。交互智能体最终输出结构化任务描述,包括研究目标、潜在数据类型及智能体调用序列。文献智能体基于交互智能体输出的任务描述,识别领域关键词,如“突发拥堵”“瓶颈流率”“信号控制”等,开展自动检索和相关文献解析,抽取变量、模型与假设关系,形成交通拥堵知识图谱,最终输出文献驱动的变量网络与研究空白点,如气象与驾驶行为的交互作用尚未形成机理模型。问题智能体基于来自文献智能体的知识图谱与数据智能体提供的实时交通数据,对时空数据进行异常检测和关联分析,识别潜在科研问题,如“雨雾条件下瓶颈流率下降是否触发同步流形成”,输出科学问题陈述与关联变量集。假设智能体基于科研问题与变量集,利用交通科研大模型的因果推理提出假设,并自动生成因果图结构,如“气象导致瓶颈流率下降→引发同步流→导致系统级拥堵爆发”,最终输出可检验的机理假设及因果模型原型。数据智能体基于假设中涉及的变量关系,调用多源数据,包括传感器、视频、气象、事件记录等,执行特征抽取与因果识别,验证变量间的相关性与时序因果,输出经验证的变量耦合结构与高维特征矩阵。建模智能体基于数据智能体输出的因果关系与特征矩阵,构建宏微观耦合动力学模型的混合动力学模型,完成参数估计与模型校准,最终输出数据支撑的机理模型与可计算公式。可视智能体基于机理模型结果,执行因果可视化、知识图谱构建与自然语言解释,输出拥堵形成机理的可视化因果链图与关键因子排序。2.2.2策略验证类问题:假设与检验该流程是对已有的理论假设或既定策略进行有效性、安全性与鲁棒性的系统化验证,包括交互智能体、数据智能体、场景智能体、实验智能体、评估智能体和决策智能体。本文结合自适应信号控制策略的多场景验证问题,说明策略验证类问题的工作流。用户通过交互智能体输入任务“验证预测驱动的自适应信号控制在高峰期的有效性”。交互智能体解析任务,识别为策略验证,并将此需求转化为具体、可执行的控制策略候选集,如基于强化学习或模型预测控制的多种信号配时方案。数据智能体从支撑层的历史数据库中整合相应数据并提供给场景智能体。场景智能体根据验证需求和数据智能体提供的数据,在数字孪生平台中生成多种仿真场景,如常态高峰、事故拥堵、大型活动散场等。实验智能体在这些仿真场景中并行执行所有策略候选,并收集详细的过程数据,如延误、排队长度、通行效率等。评估智能体对实验数据进行多维度绩效评估与因果归因,量化各策略的优劣。决策智能体基于评估报告对不同策略进行综合权衡,若策略有效,决策智能体可作出采纳决策或提出参数微调建议,并返回交互智能体;若策略未达预期,决策智能体会生成策略修订建议,开启新一轮的验证。最终,流程输出策略的多场景量化评估报告和策略采纳/优化/修订建议。2.2.3系统优化类问题:搜索与迭代该流程面向复杂动态交通系统,旨在寻找满足多重约束与目标的最优或近似最优解,并通过持续迭代实现策略的进化,包括交互智能体、策略智能体、数据智能体、场景智能体、实验智能体、评估智能体和决策智能体。以空地协同调度的多智能体优化问题为例,该流程始于用户通过交互智能体输入的自然语言任务,如“优化无人机与地面车辆的协同调度,平衡效率与能耗”,交互智能体随即对任务进行语义解析,将其识别为系统优化类型,并提取关键变量、目标与约束,形成一份结构化的优化任务描述。接下来,策略智能体承接此任务描述,将其转化为一个具体的搜索问题,生成一个多样化的初始策略种群,即多种可能的调度方案,并形式化地定义多目标优化函数,为后续的演化计算奠定基础。数据智能体从支撑层的历史数据库中整合相应数据并提供给场景智能体。场景智能体根据优化问题与策略种群的特征和相应数据,在数字孪生平台中构建与之匹配的高保真仿真实验环境,为策略评估提供可靠的测试场。环境就绪后,实验智能体作为核心的“演化引擎”开始工作,驱动策略种群在虚实交互的仿真环境中进行大规模并行实验,并利用进化算法或强化学习等技术,使策略不断地经历评估、选择、交叉与变异的迭代循环,从而自主地演化出性能逐代提升的新策略。评估智能体则在此过程中密切监控,对每一代策略的表现进行多维度量化评估,并生成关键的帕累托前沿,以清晰揭示不同优化目标(如效率与能耗)之间的内在权衡关系。最后,决策智能体基于评估结果与帕累托前沿行使最终决策权。它综合系统约束与决策偏好,判断当前策略种群是否已收敛到满意解。若已满足要求,则从中选定最终的策略方案输出并返回给交互智能体;若未满足,则自动分析性能瓶颈,调整优化方向或目标权重,并将修订指令反馈给策略智能体,从而开启新一轮“策略生成-实验-评估”迭代。流程最终输出经演化优化的最优策略方案、帕累托前沿分析报告以及策略控制参数集。2.2.4概念验证:贯穿3类流程为说明“AI交通科学家”框架处理复杂CPSS问题的全流程能力与人机协同,本文设计了城市空中交通走廊(urban air mobility corridor,UAM)与地面主干路网动态耦合优化的概念验证案例。此案例将依次触发机理发现、策略验证与系统优化3类科研流程,并贯穿人机协作。案例如下:在未来特大型城市的空中交通走廊中,电动垂直起降飞行器(electric vertical take-off and landing,eVTOL)与地面车流产生交互。人类管理者向系统提出任务:“请分析与优化空中交通走廊起降场高峰时段集散流量对周边城市快速路网的冲击,并预防系统性瘫痪风险”。人类管理者通过交互智能体以自然语言下达上述指令,动态路由将其识别为机理发现类问题,并激活机理发现科研链路。系统完成从跨域文献综述、空-地多源数据关联分析到科学假设生成的过程,并提出因果假设“恶劣天气导致eVTOL进近航段效率陡降,引发的航班积压与改航备降需求,在短时间内转化为前往备用起降场的地面保障车辆与旅客接送车流,是触发关键枢纽周边路网级联性拥堵的共振诱因”。将上述假设及支撑的时空关联数据提交给人类专家审核。人类专家确认其合理性,补充关键的社会行为参数,修正模型中关于旅客在延误场景下对网约车偏好的微观行为偏差。“旅客在面临航班取消或长时间延误时的焦虑情绪,会显著提高其放弃公共交通转而选择即时性更高的网约车出行的概率”。由此,系统构建了融合专家反馈的包含空域流量、地面路网、气象干扰及旅客行为的模型。基于上述模型,人类管理者下达了新的具体指令“验证基于气象预警的空-地动态流量协同疏导策略的有效性,具体来说,当气象雷达预测未来30 min内UAM将出现效率衰减时,系统自动生成并仿真一组联合指令,包括适当调减起降场中eVTOL的起降架次、向空中航班发布预先改航建议、同步对地面关联快速路匝道实施动态流量诱导与信号协调”。动态路由识别其为策略验证问题,并激活相应科研链路。在由实验层智能体构建的城市级数字孪生环境中,对该策略进行大规模、多场景的仿真测试与量化评估。决策智能体生成的评估报告显示,该策略在模拟的雷暴天气场景下,能平均降低关联区域40%的极端交通延误,避免路网瘫痪。报告同时指出,该策略会导致UAM运营商在高峰时段损失约15%的运营收益。系统将包含公众出行效率提升与商业运营收益损失的量化评估报告提交给人类管理者。管理者统筹之后,给出指令“采纳该方案作为高级别预警下的应急响应机制,但需启动精细化协同优化”。由此,任务目标成为在多重约束下寻找空-地系统全局更优的常态化运行方案,系统经动态路由识别后进入系统优化阶段。策略智能体生成一个包含大量可变参数的策略种群,如精细化eVTOL时隙分配、地面路网自适应信号配时、对旅客的多模式出行建议等。实验智能体作为演化引擎,驱动该策略种群在虚实同构的具身实验场中进行自主迭代与进化。评估智能体持续计算“整体通行效率”“UAM运营准点率”“社会总出行时间成本”等多个目标的帕累托前沿。当系统演化出一组或者几组最优方案时,决策智能体将最终的判断权交还给人类管理者,并将完整的帕累托分析报告、各方案对应的具体技术参数、预期效果和潜在影响均呈交给人类管理者,由人类管理者依据政策导向选定最终实施方案。综上,该概念验证案例表明,“AI交通科学家”框架可将一个涉及未来技术、跨管理域、充满不确定性的复杂系统挑战,系统分解并依次通过机理发现、策略验证、系统优化的科研链条进行处理,形成从理论认知到优化策略的闭环。它展示了“人类在环”协同机制:人类在跨域问题定义、社会行为参数注入、多维利益权衡与重大价值裁决等节点行使监督与指导权,系统则承担了海量异构数据分析、高通量跨域仿真推演与高维策略空间搜索等繁重的计算任务,为人机协同决策提供了支持。
 夜雨聆风
夜雨聆风