 夜雨聆风
夜雨聆风点击蓝字 关注我们
引言
机器人仿真平台的世界里,不存在“一招通吃”的神器。Gazebo曾是开源仿真的事实标准,但Gazebo Classic已于2025年1月正式停更,社区与新版本之间的“断崖切换”让许多老用户无所适从。MuJoCo在学术界的地位无可撼动,它被DeepMind收购后开源,几十年来一直是运动控制研究的“黄金标准”;CoppeliaSim则以“瑞士军刀”式的多引擎灵活性在各式异构场景中独树一帜;PyBullet凭借轻量级的Python封装和极低的使用门槛,在教学和快速原型领域占有一席之地;而NVIDIA Isaac Sim正依托RTX光线追踪和GPU并行物理加速,在视觉真实感和训练吞吐量上建立起工业级的竞争壁垒——以高达99%的精度跨越了仿真到现实部署的巨大鸿沟。
本文将从工业制造、学术研究和开源验证三大场景,带您系统梳理当前主流仿真平台的技术特点与选型逻辑,帮助本土企业找到那把“称手的兵器”。
一、先“对号入座”:
你要训练什么?你的机器人在哪一站?
选型之前,不妨先问自己三个问题:
我的任务依赖高精度视觉感知吗? 如果你的策略模型需要从RGB图像中学习物体识别、场景理解,那么平台的渲染能力至关重要。NVIDIA Isaac Sim在这些场景下拥有几乎唯一的代差优势。
我的核心任务是力学精度(与接触动力学)吗? 若你研究四足机器人的步态生成或灵巧手的抓取控制,则物理引擎的刚体接触动力学精度是首要指标。MuJoCo被公认为该领域的黄金标准,而Newton引擎在可微分物理方向也展现出强劲潜力。
我的团队是ROS生态的传统标准使用者吗? 若团队已深度继承ROS/ROS2的代码资产与工程习惯,Gazebo Fortress/Harmonic仍然是无缝继承ROS生态的路径。
此外还可以关注:推理阶段的可微分物理是否能通过梯度传导加速收敛;是否支持柔性体、粒子、流体等多物理场建模;以及团队现有的硬件预算能否支撑RTX高显存显卡和多GPU训练集群。
二、Gazebo:ROS生态的老牌劲旅,
新版本是必须迈过的坎
Gazebo是ROS社区的默认仿真器,凭借ROS生态的深度集成,它在移动机器人导航、多机器人协同验证等传统算法研究领域占据绝对优势。在2026年的机器人仿真生态中,Gazebo仍然是ROS研发流程中最容易上手的仿真器。
2.1 现状:新版本已成主流,Gazebo Classic已无路可走
需要特别强调的是,Gazebo Classic(版本≤11)已于2025年1月正式停止维护,依赖的Ubuntu 20.04 Focal也已在2025年4月结束生命周期。目前官方推荐使用的版本包括Gazebo Fortress(长期支持,配合ROS2 Humble)和Gazebo Harmonic(配合ROS2 Iron/Jazzy)等。新版本使用gz sim命令启动,与旧版ign gazebo有较大差异。国内社区不少教材仍在沿用Classic版本的代码片段,这可能会导致新建项目在“尚未开始熟悉框架”时就走错了技术路线的风险。新项目必须直接从Fortress/Harmonic版本学习,避免在已被遗弃的旧框架上投入心血。
2.2 优缺点与可用范围
优点:与ROS 2深度集成,社区体量庞大,教程和插件积累极其丰富,物理引擎可切换(ODE/Bullet/DART),新版本在传感器模拟和场景管理上有了显著增强。
不足:GPU并行性能远弱于Isaac Sim,视觉渲染质量无法与RTX光追相提并论,大规模端到端感知模型训练存在瓶颈。
适用场景:ROS技术栈内部的算法功能性验证、中低维传感器(激光雷达、里程计、IMU)的导航规划算法测试、多机器人协同演示原型开发。
三、MuJoCo:运动控制的“黄金标准”,MJX让训练快两三个数量级
MuJoCo(Multi-Joint Dynamics with Contact)在刚体接触动力学和摩擦建模精度上长期占据学术神坛——绝大多数涉及四足、人形、灵巧手操作的论文都基于MuJoCo验证算法改进。然而,传统MuJoCo由C语言实现、单线程运行,经典批量训练方式依赖CPU多进程调度,扩展能力有限。
3.1 MJX:把训练搬上GPU,还送自动微分功能
MJX是Google DeepMind用JAX语言完整重写的MuJoCo后端,核心变化是把物理仿真搬到了GPU上。借助JAX的vmap管道,单张GPU上可同时跑成百上千个仿真环境实例,XLA编译器自动做算子融合优化,训练吞吐量比CPU多进程高出一到两个数量级。更关键的是JAX天然支持自动微分,物理仿真本身变成了可微的,策略梯度可以直接从仿真动力学中传递回来,大幅减少了噪声估计。其训练环境MuJoCo Playground涵盖四足、双足运动和非精密操作等经典任务和视觉任务,支持JAX和Warp双重后端实现。
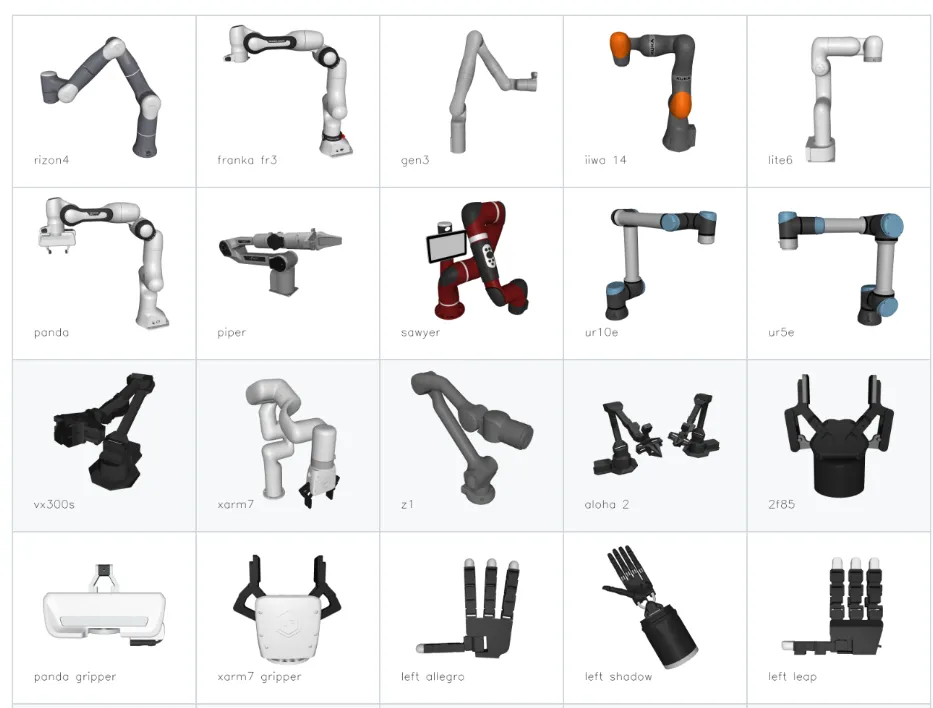
MJX还提供了DeepMind官方维护的mujoco_menagerie模型库,迄今已收录70多款高质量仿真模型,覆盖Franka机械臂、Unitree Go1/H1/G1四足与人形、ANYmal四足等主流机型。每个模型附带明确的质量评级(A+、B、C等),A+级模型的惯性参数和碰撞体都经过严格校准,即开即用。所有模型兼容MJX的GPU后端,可以直接用于大规模并行仿真和可微优化,无需为GPU版本单独转换模型格式。
3.2 硬接触与柔性体的边界
MuJoCo对硬碰硬接触的模拟远优于Bullet/ODE等引擎。在一项2026年4月独立发表的横评中,研究者用Drake、MuJoCo和Bullet复现实测碰撞轨迹数据——在简单立方体抛掷实验中,三款引擎捕捉非弹性碰撞的精度都令人满意,但对弹性恢复系数的还原普遍存在偏差;在Cassie双足机器人高自由度跳跃着陆这一更高维例子里,仿真器能较好抓取主体运动趋势,但精度受限于真实机器人模型与被仿真模型的差异。这表明,即便接触力学精度最高的MuJoCo,用于Sim-to-Real之前仍然需要做细致的物理参数辨识。
四、CoppeliaSim:多引擎“瑞士军刀”,异构系统集成利器
CoppeliaSim(原V-REP)的特色是“把选择权交给用户”——它内置了5种物理引擎(ODE、Bullet、Newton、Vortex、MuJoCo),可随任务自由切换。对于需要混合多种物理特性的场景(例如柔性绳索抓取与刚体机械臂运动在同一任务中交替发生),这一能力是其他单一引擎无法比拟的。
平台支持“创建-组合-仿真”全链路操作,可精准模拟真实物理交互与多模态感知场景,适配人形、机械臂等各类具身智能体模型开发需求,无缝对接主流框架与ROS/ROS2生态,大幅缩短研发周期、降低落地成本。传感器精度的细节把控也足够扎实——接近传感器支持自定义检测空间,视觉传感器内置图像处理管道,可用于对力触、图像传感器的原型验证。在通信层面,CoppeliaSim支持Lua和Python两种脚本语言,对模型行为的控制粒度非常细,国产替代成本相对可控。但也有一个明显的不足——可视化渲染的真实感远低于Isaac Sim;大规模视觉策略训练的自动化程度仍以学术演示为主,工业量产的应用较少。
五、PyBullet:
轻量级Python性价比之王,入门首选
PyBullet是Bullet Physics SDK的官方Python接口,几行代码即可启动仿真,硬件门槛极低。PyBullet提供实时碰撞检测、多物理仿真、正向/逆向动力学和运动学计算、以及URDF/SDF/MJCF/OBJ等多种模型导入,可与OpenAI Gym深度集成。
PyBullet的一个重要场景是“低成本验证算法可行性”。在探索控制策略结构或调参阶段,轻量级仿真带来的快速反馈与大模型级训练产线同等重要。最新版本PyBullet 3.2.0还改善了机器人sim-to-real的物理模型精度,提供对Laikago四足机器人的精确模拟和多层指令实现,可通过Python调取VR接口进行沉浸式调试。
PyBullet的主战场包括强化学习算法的快速原型开发、人形机器人双足平衡初步验证,以及缺少独立GPU、只能靠笔记本电脑做开发的学生和初创团队。由于渲染质量较低,不适合重点依赖视觉输入(RGB/深度图像)的感知密集型训练,大规模并行吞吐也无法与Isaac Lab或MuJoCo MJX相提并论。
六、Isaac Sim:
“工业级标杆”的代名词
Isaac Sim的核心竞争力在于“GPU加速”和“AI原生”这两个从未被颠覆的标签。
高保真物理引擎(PhysX 5 + Newton实验性支持):利用GPU强大算力,Isaac Sim可以同时实时模拟成千上万个刚体、软体、流体和关节的动力学系统——学术圈基准测试显示,CPU仿真器如Gazebo Classic只能跑数个环境,而Isaac Sim可以并行跑4096+个环境,使强化学习训练速度提升一到两个数量级。最新版本6.0启用了Core Experimental API和Newton/MuJoCo-Warp后端作为可选的物理底层。换句话说,Isaac Sim正在从NVIDIA自家的PhysX单一引擎,走向兼容多种物理后端的开放平台——这个趋势对更广泛地接受学术社区的贡献至关重要。
核心功能体系包括:
物理引擎:PhysX 5(刚体、软体、流体等)+ 可选的Newton实验后端,接触力学精确模拟摩擦力、碰撞反弹和柔性物体变形。
传感器套件:RGB相机(支持曝光、光圈、运动模糊、镜头畸变、ISP管线模拟)、激光雷达(模拟光束发散、反射强度、雨雾干扰、多回波)、深度相机(模拟ToF或结构光原理的噪声和缺失)、触觉/力觉传感器、IMU(模拟加速度计和陀螺仪零偏与噪声)。
合成数据生成(Synthetic Data Generation,SDG):同步生成分割掩码、3D边界框、深度图、法线图、实例ID等完美真值标签;域随机化光照、纹理、位置和背景干扰等要素,迫使模型学会“不变泛化”。6.0版本在Replicator层面还新增了对物理属性(质量、摩擦、恢复系数)跨场景随机化、火和烟雾的体素级数据捕获等高级功能。
ROS 2桥接:Isaac Sim节点可直接作为ROS 2节点发布/订阅话题,支持硬件在环验证——在Isaac Sim中运行机器人模型,另一台计算机运行真实ROS 2导航栈或控制算法,实现真正的“虚实结合”测试。
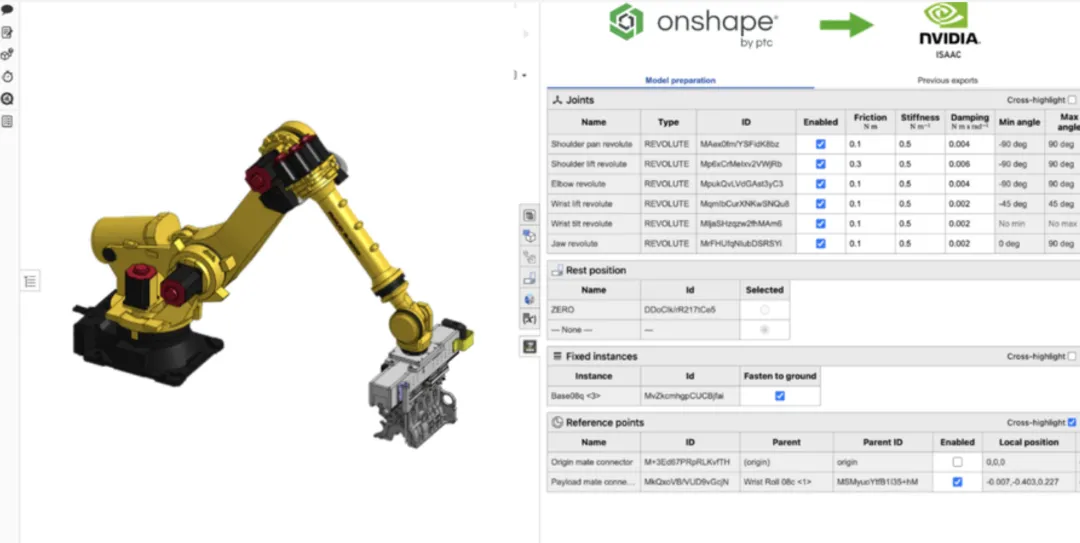
OpenUSD场景标准:基于通用场景描述(Universal Scene Description,OpenUSD)构建,支持非破坏性编辑、图层化管理和多工具协作(Maya、Blender、CAD软件均可导入),是数字孪生的标准格式。
与Isaac Lab的分工协作:Isaac Sim专注于场景搭建、传感器配置、可视化、ROS 2测试和数据生成(偏向“搭建”和“预览”);Isaac Lab则承担强化学习/模仿学习的大规模并行训练,完全基于Python API在无头模式下运行(偏向“训练”和“批量推演”)。
工业部署验证:ABB已将NVIDIA Omniverse库深度集成到其离线编程与仿真软件RobotStudio®中,连同新发布的RobotStudio® HyperReality技术平台,使制造商能在虚拟环境中完成生产线设计、测试和优化,将安装调试时间缩短高达80%,降低成本高达40%,上市周期缩短达50%。该方案已在富士康消费电子组装线成功落地试点。RoboDK也为Isaac Sim 5.0发布了对80多个品牌1200多款工业机器人的桥接,形成从虚拟设计到真实执行的无缝工作流。智元机器人依托Genie Sim 3.0在真实工业场景中完成严苛验证——仅2万帧仿真数据训练即实现真机抓取100%成功率。西门子在NVIDIA GTC 2026上展示的合作成果同样将原型开发周期从18-24个月缩短至仅7个月。这些密集落地的工业案例足以证明,Isaac Sim已经超越了“学术玩具”的定位,正在成为工业制造的规模化底座。
七、工业案例:从落地数据论英雄
以下是2025至2026年间部分有据可查的重要工业案例:
ABB + NVIDIA:将Omniverse库集成至RobotStudio,安装调试时间缩短80%,成本降40%,上市周期缩短50%,富士康率先试点。
智元机器人:依托Genie Sim 3.0,仅2万帧仿真数据训练即实现真机抓取100%成功率,在实际产线部署中保持零失误。
西门子 + Humanoid + NVIDIA:基于仿真先行硬件设计,原型开发周期从18-24个月缩短至7个月,大幅优化了执行器选型和关节质量分布。
这些头部企业的规模化部署经验足以说明,物理AI仿真的工业成熟度已跃过从“实验室玩具”到“制造业必需品”跨越的临界点。
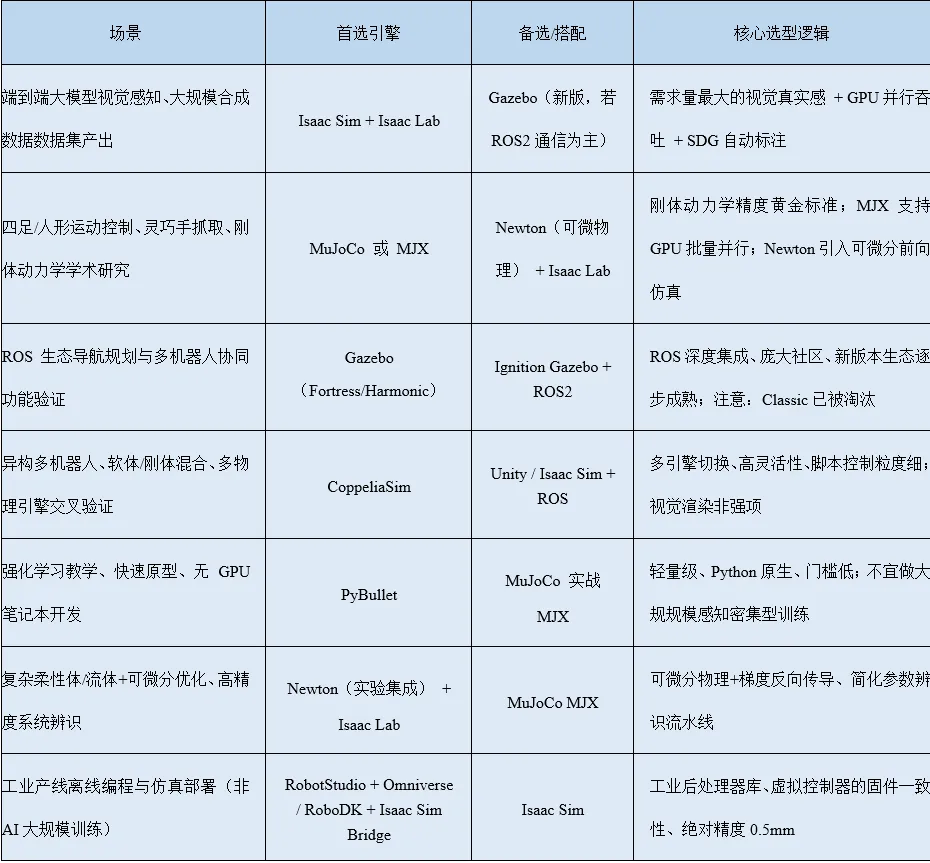
八、选型一览表:一张表终结选择困难
九、结语
仿真平台没有尽善尽美的选项,但有“更匹配当下任务”的选择。如果你需要在真实感环境里培养端到端的视觉策略,Isaac Sim是目前唯一的生产级支柱。如果你的刚体动力学精度还差一点点、论文审稿人看着呢,MuJoCo仍然是不可绕开的金标准。如果你属于ROS生态的坚定支持者,只需记住:新项目必须投向Gazebo Fortress/Harmonic,彻底告别Classic的桎梏。如果你们是一家教学机构或初创团队,PyBullet和CoppeliaSim能帮助在预算极度受限的前提下完成绝大多数最初几轮的技术验证。
选型不是一劳永逸的孤立决定——企业发展到不同阶段,需要动态调整和灵活组合。但工业落地数据胜于任何空泛的口头评价,让那些已经在万台项目交付线和数字化工厂中被反复校验的方案,成为你决策的航灯。
初稿:江召兵
排版:王绎贤
审核:纪小方
往期回顾
【物理AI仿真+具身智能数据与应用(3)】CAE数值仿真:从有限元到多体动力学,为机器人的“肌肉骨骼”注入精确物理参数
【物理AI仿真+具身智能数据与应用(2)】合成数据破解“数据粮荒”——让中小企业也能用上亿级训练资源
【物理AI仿真+具身智能数据与应用(1)】万台机器人下线前,先虚拟跑完十万公里
---------------------------------
南京欧帕提亚信息科技有限公司
地址:南京市江宁区天元西路59号银城INC中心
电话:13921197961(微信同) 19005444324
邮箱:owen9020@126.com
珠海欧帕提亚信息科技有限公司
地址:珠海市香洲区正方云溪谷A座1803
手机:13921197961
邮箱:owen9020@126.com
---------------------------------
湖南云数仿真信息技术有限公司
地址:长沙市高新开发区芯城科技园一期2栋
手机:15345188568
邮箱:owen9020@126.com
---------------------------------
