 夜雨聆风
夜雨聆风PX4 是全球最主流的开源无人机飞控软件项目。它为无人机、无人车、无人艇等自主系统提供高性能、模块化的飞行控制解决方案,被广泛用于研究、工业、商业和DIY领域。

PX4 是什么?
PX4 是一个完整的开源飞行控制栈(Flight Stack),它不仅能控制飞行,还提供了从传感器融合、姿态控制、导航到任务执行的完整软件框架。
主要特点:
高度模块化:每个功能都是独立模块,通过 uORB(发布-订阅消息总线)通信,可在运行时动态替换。 跨平台:主要运行在 NuttX 实时操作系统上,也支持 Linux。 多机型支持:多旋翼、固定翼、VTOL(垂直起降)、无人车、无人艇等。 研究友好:被全球高校和研究机构作为首选平台。 工业级可靠性:支持商业和专业应用。
支持的飞行器类型(尤其是 VTOL)
PX4 对 VTOL 支持非常出色,是其一大亮点。
常见 VTOL 构型包括:
QuadPlane(固定翼 + 四旋翼垂直电机,最常用) Tailsitter(尾坐式) Tiltrotor(倾转旋翼)

上图:Volantex Ranger-Ex QuadPlane(典型 PX4 VTOL 示例)

软件架构(核心亮点)
PX4 采用清晰的两层架构:
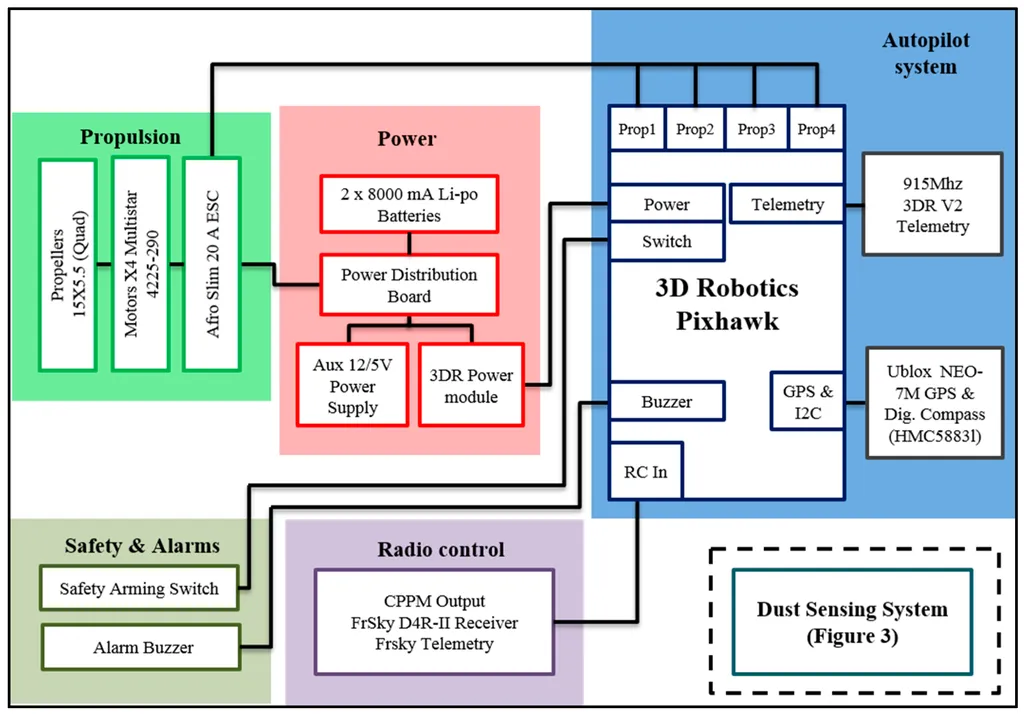
高层架构说明(官方概念):
上层(Middleware):通用机器人中间件,负责通信、硬件抽象、uORB 消息总线。 下层(Flight Stack):飞行控制核心,包含: 传感器融合(EKF2 等) 姿态/位置控制器 导航(Navigator) 飞行模式管理 执行器控制(电机/舵机)
这种设计让开发者可以轻松添加新功能或替换模块。
硬件生态 —— Pixhawk
PX4 最经典的硬件搭档是 Pixhawk 系列飞控(开源硬件设计)。

上图:Pixhawk 4(现代主流版本)
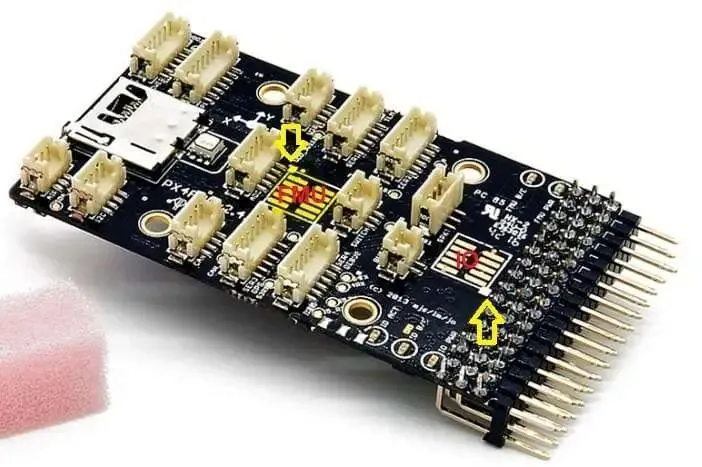
Pixhawk 系列支持多种传感器、遥控、 telem 模块,扩展性极强。
地面站与工具链
QGroundControl(QGC) 是 PX4 官方推荐的地面站软件。
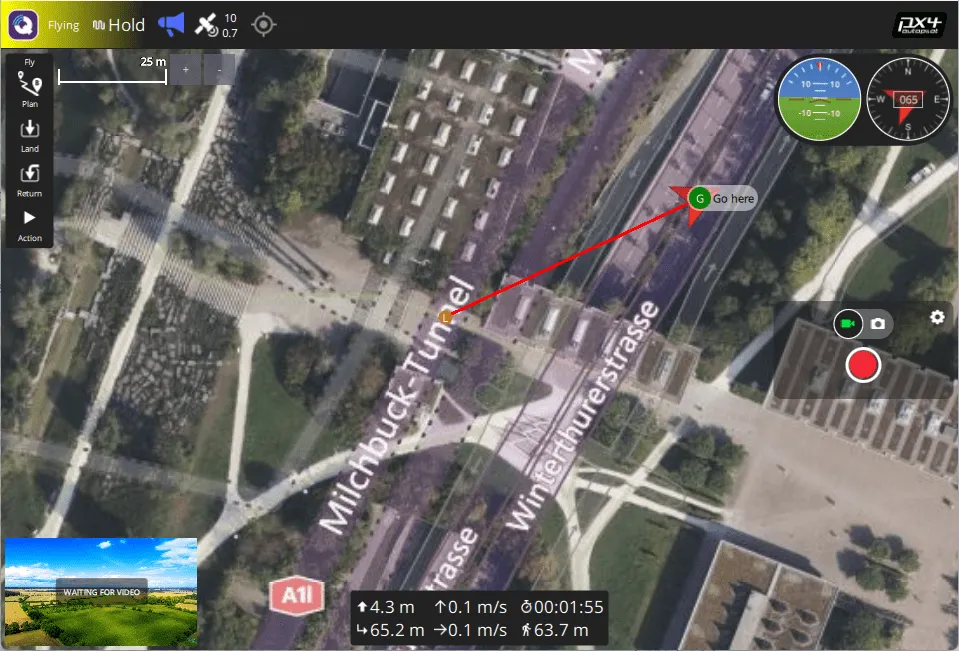
QGroundControl 主要功能:
飞行参数配置与调参 航线规划与任务执行 实时飞行监控 日志分析 固件烧录
其他重要工具:
MAVLink:轻量级通信协议(PX4 与地面站、伴侣计算机通信标准) MAVSDK:用于开发地面站/App/伴侣计算机的 SDK Gazebo:强大仿真环境(支持 SITL/HITL) ROS 2:深度集成,支持高级自主应用
PX4 的优势与适用场景
优势:
模块化程度高,易于二次开发 VTOL 支持领先 社区活跃 + 企业支持(Dronecode) 研究与工业双友好 持续更新(当前已到 v1.17+ 版本)
典型应用场景:
科研与高校教学 工业巡检无人机(尤其是 VTOL) 自主系统研发 商业无人机平台定制 教育与 DIY 高级项目
与 ArduPilot 简单对比
| 架构 | |||
| VTOL 支持 | |||
| 研究友好度 | |||
| 社区与企业 | |||
| 上手难度 |
如何快速上手 PX4?
硬件:购买 Pixhawk 4 / 6X 等 + GPS + 遥控器 软件: 下载 QGroundControl 通过 QGC 烧录最新 PX4 固件 仿真:使用 Gazebo SITL(无需硬件即可测试) 学习资源: 官方文档:https://docs.px4.io GitHub:https://github.com/PX4/PX4-Autopilot
总结
PX4 Autopilot 是目前开源飞控领域最专业、最模块化、VTOL 支持最强的平台之一。它不仅适合爱好者 DIY,更被大量研究机构和工业项目采用。
如果你想:
构建自己的 开源 VTOL 无人机 进行高级自主飞行研究 或者只是想深入了解现代飞控架构
PX4 都是非常值得投入学习和使用的项目。
