 夜雨聆风
夜雨聆风2026年了,嵌入式AI项目的成功率,不超过三成。不是技术不行,是节奏不对。
从RK3588到Jetson Orin,从Zephyr RTOS到瑞萨FSP,工具链越来越成熟。但跑通Demo和量产出货之间,隔着一整条沟。
这篇不讲大道理。直接上代码,逐条讲踩过的坑。
01 嵌入式AI:算法不是最难的,内存管理才是
很多人一上来就调模型、调参数。方向就错了。
嵌入式AI最大的杀手不是精度不够,是跑着跑着内存碎了,死机了,现场没人能复现。
先看一段典型的错误代码:
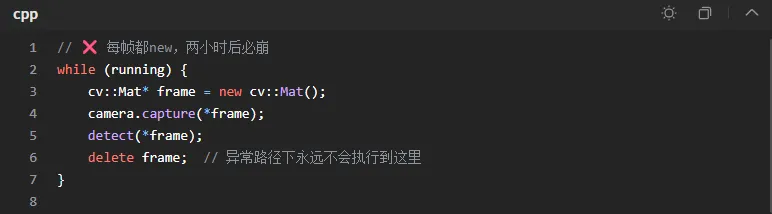
问题在哪?频繁new/delete制造内存碎片。嵌入式设备内存就那么点,碎片积累到一定程度,malloc都分不到连续空间,直接挂。
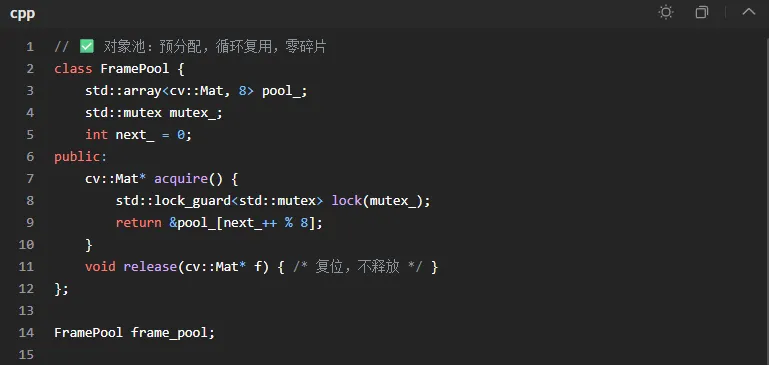
正确做法:对象池 + 环形缓冲区。
多路视频怎么处理?每路开一个线程,CPU直接压垮。
用读写者模式:
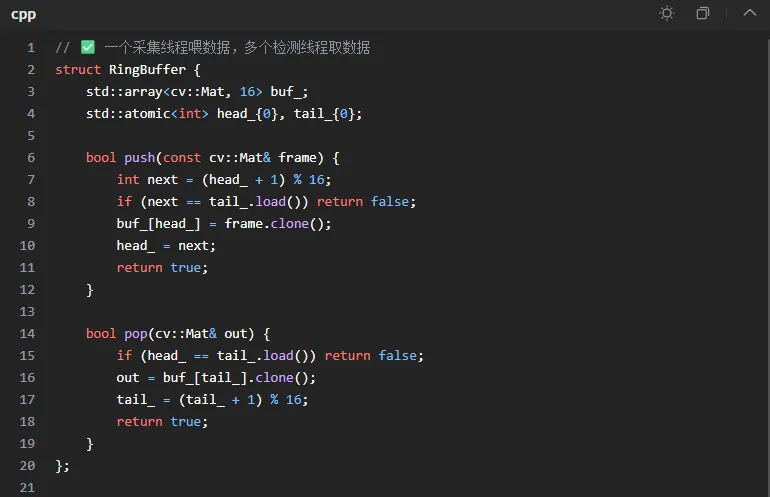
采集线程只管往里塞,检测线程只管往外取,彻底解耦。
再说模型部署。
转换工具一跑,模型导出,直接上板?
你会在现场发现:检测框偏移了20像素,置信度全乱了。
原因很简单——PyTorch的归一化参数和NPU要求的不一致。
必须跑一轮验证脚本:
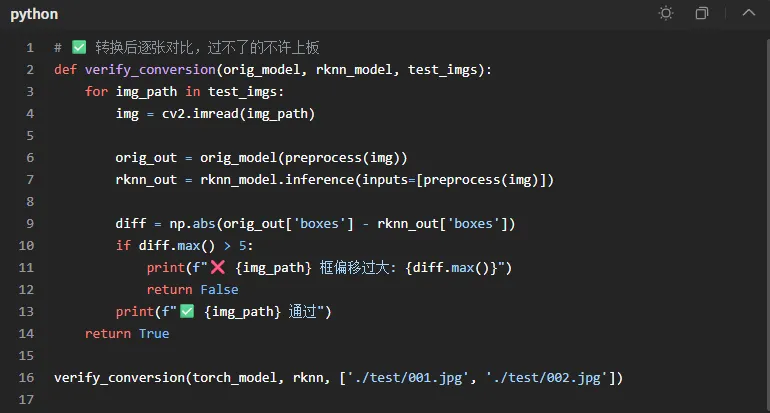
这一步不做,现场返工成本是开发阶段的十倍。
02 Zephyr:环境搭对了,才算开始
Zephyr是个好系统。但它的环境搭建,劝退了一大批人。
先把依赖装对,少一个都编译不过:
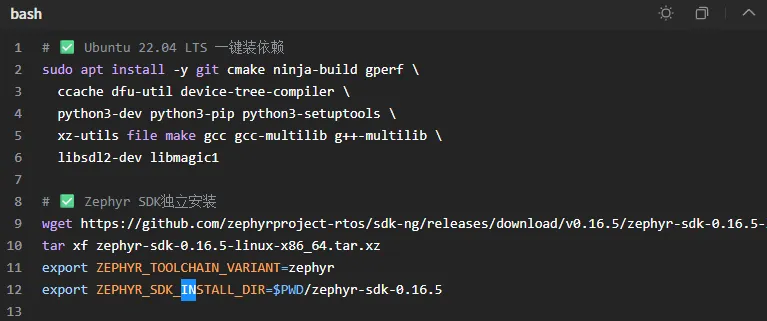
版本卡死这几个:
cmake ≥ 3.20.0 python3 ≥ 3.8 dtc ≥ 1.5.0
环境好了,上实战代码。这是一个多线程 + 日志的最小模板,可以直接拿去改:
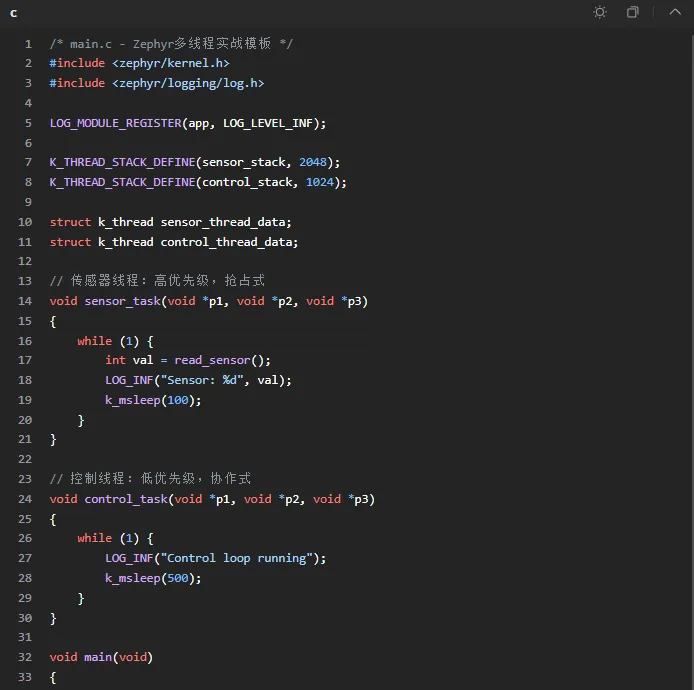
三个高频翻车点,一张表讲清楚:
K_THREAD_STACK_DEFINE(xxx, 2048) | ||
prj.confCONFIG_LOG_BACKEND_UART=y | ||
.dts 里对应外设是否 enable |
03 瑞萨FSP:图形化配置不是偷懒,是正解
瑞萨的FSP和传统HAL最大的区别:双向可配置。
上面用RASC图形工具点几下,下面针对特定外设做寄存器级优化。
以RA6M5的GPT定时器生成PWM为例,看RASC导出的代码长什么样:
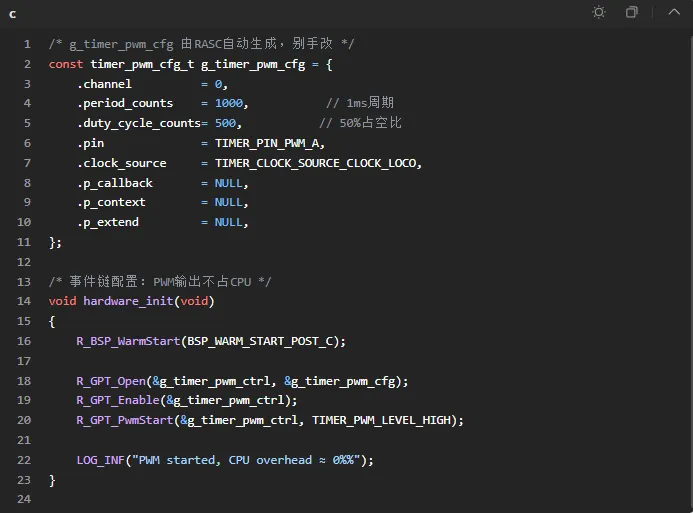
实测数据:FSP的GPT驱动比传统库函数,PWM生成时CPU开销降低约30%。靠的就是硬件事件链。
但有三个暗坑必须记住:
第一,版本矩阵是命根子。

第二,eFuse一旦烧录不可逆。开发阶段千万别真烧,用可撤销方式先验证。
第三,调试阶段别急着开存储加密,JTAG和日志输出会受限。功能验证完、量产前再开。
04 安全:一行代码毁掉整套加密
这不是吓唬你。见过不止一个项目这样出货:
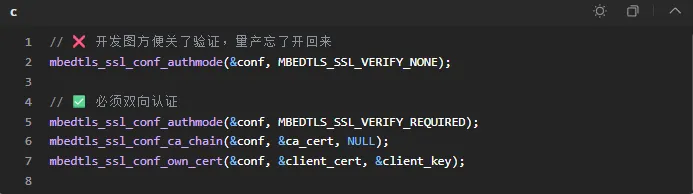
就这一行的差别,整套TLS加密形同虚设。
OTA升级必须A/B分区,没有例外:
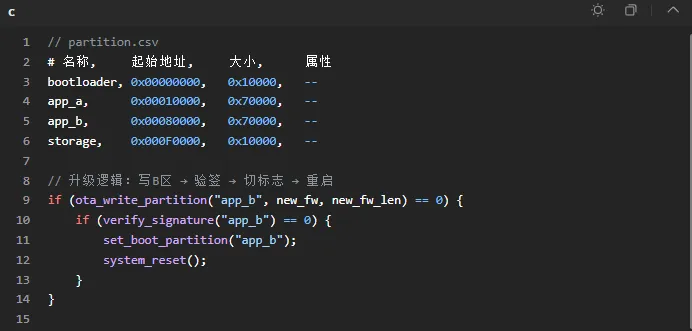
升级中途断电?不怕。启动失败自动回滚A区。
05 选场景:别从模型出发,从痛点出发
这是最反直觉的一条原则。
别一上来就想"我要上个AI"。先把产品里所有需要"判断"的地方列出来,逐个打分:
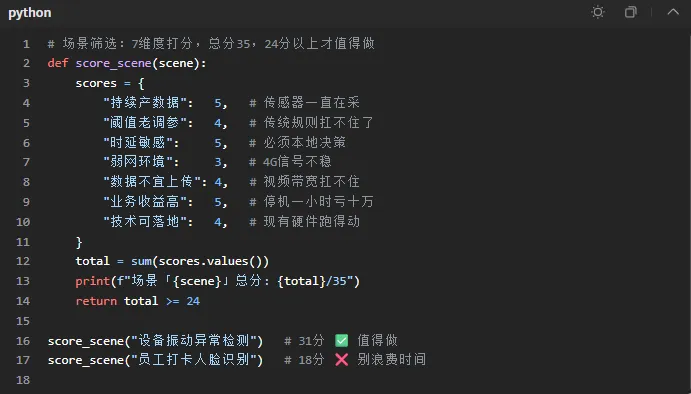
PoC做完后,别问"模型准确率多少"。问这四个问题:
设备是不是更早做出了正确动作? 上传到云端的数据量是不是减少了? 规则维护成本是不是降低了? 现有硬件预算内能不能长期稳定跑?
四个里三个"是",继续。只有"模型看起来还行"——不是好场景。
嵌入式AI、Zephyr、FSP,三条线各有各的战场。但底层逻辑完全一致:
不是单点技术问题,是全局工程问题。
算法、界面、硬件加速、多线程、内存管理、安全防线、场景筛选——缺一不可。
上面的代码可以直接拿去用。但比代码更重要的,是节奏:
先搭稳基础设施,再谈智能。
别急。急的人,半年后都在修Bug。
如果你渴望改变,技术深耕、拒绝内卷,嵌入式或许是你最值得的投资。扫码咨询学到牛牛课程顾问(15802827694微信同号)领取《嵌入式开发面试题库》及学习资料,开启你的高薪转行之路!

扫码领取学习资料
