 夜雨聆风
夜雨聆风

视觉算法圈有个共识:模型在实验室跑得再好,一上路就露怯。夜间眩光、运动模糊、低光照噪声——往往不是算法不行,而是从传感器进光那刻起,退化已经发生。
这几年,视觉技术栈正在被重新拼接。神经ISP和任务驱动优化开始打通成像与感知的壁垒,RAW域数据不再只为出漂亮图像,而是直送下游检测与分割。扩散模型和Mamba架构将去噪、超分、去模糊统一为逆问题求解,成为恢复视觉信息的底层设施。可微光学设计则把镜头本身变成可学习参数,与重建网络端到端联合优化。SAM、CLIP、Depth Anything等基础模型,让开放场景的视觉理解不再依赖海量标注。真正卡脖子的是:这些方法散在论文里,怎么从“读到”到“跑通”,再到“部署到自己的硬件上”?
这次五天专题,就是用可复现的代码和工程级数据,把“光子→决策”这条链路从头走一遍。
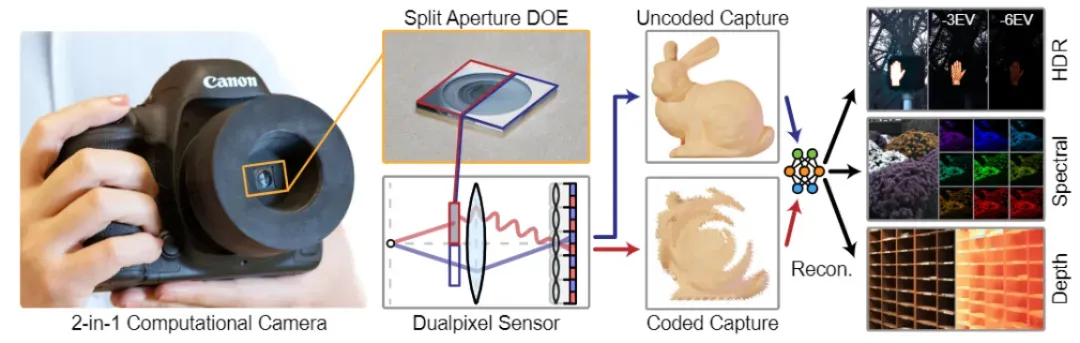
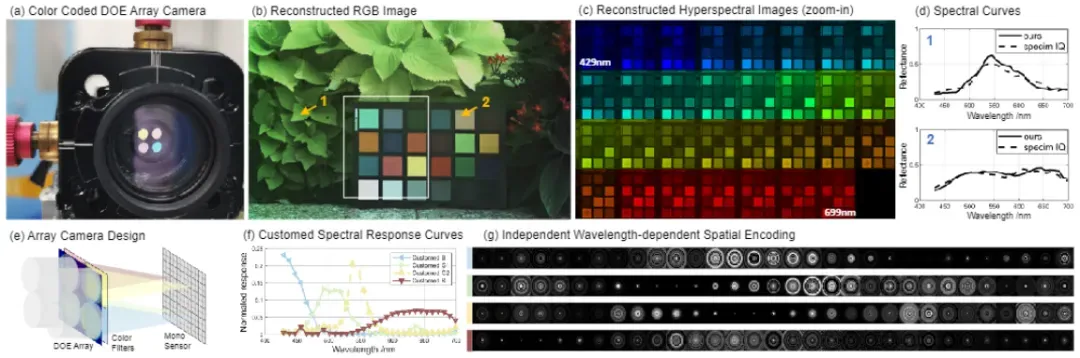
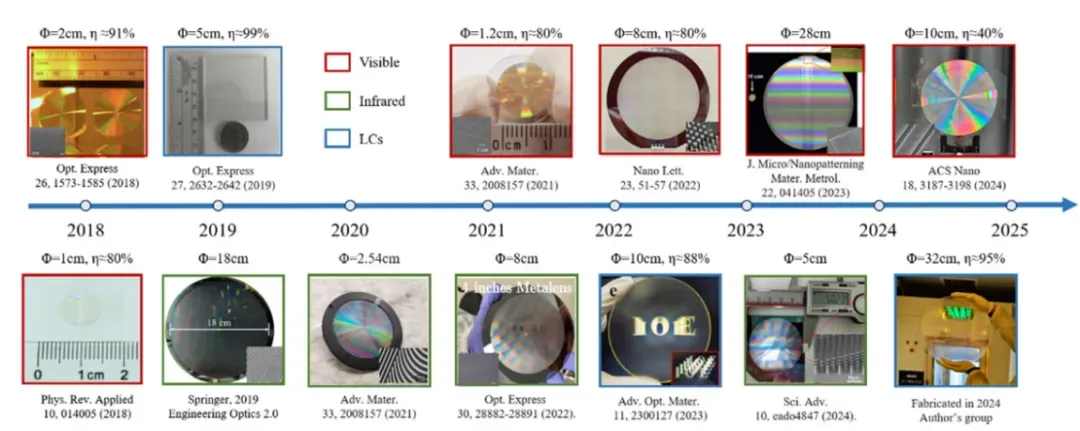
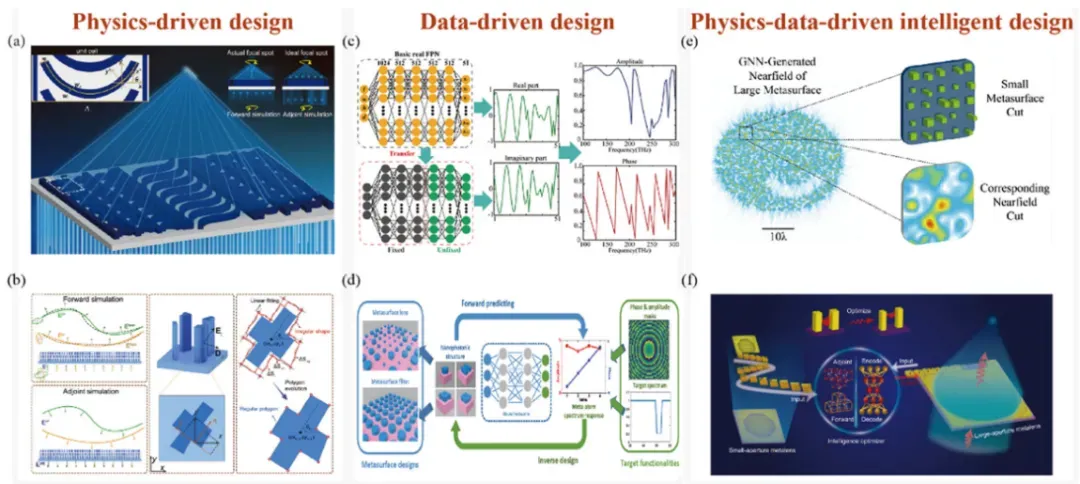
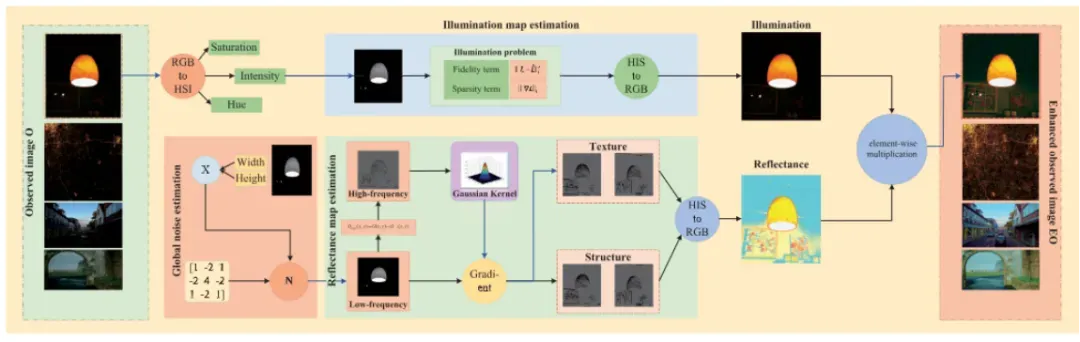
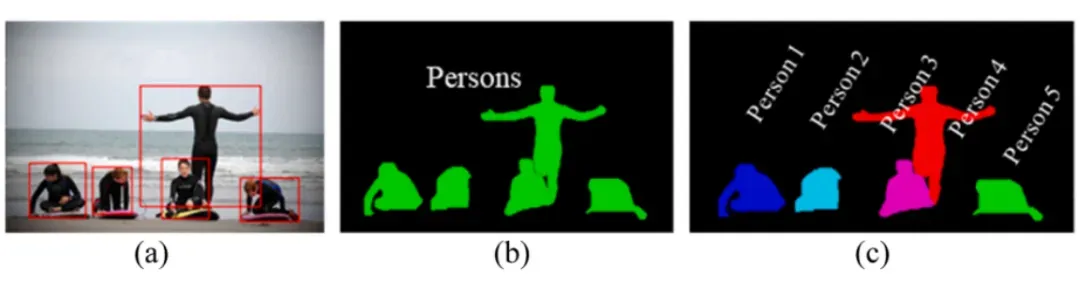
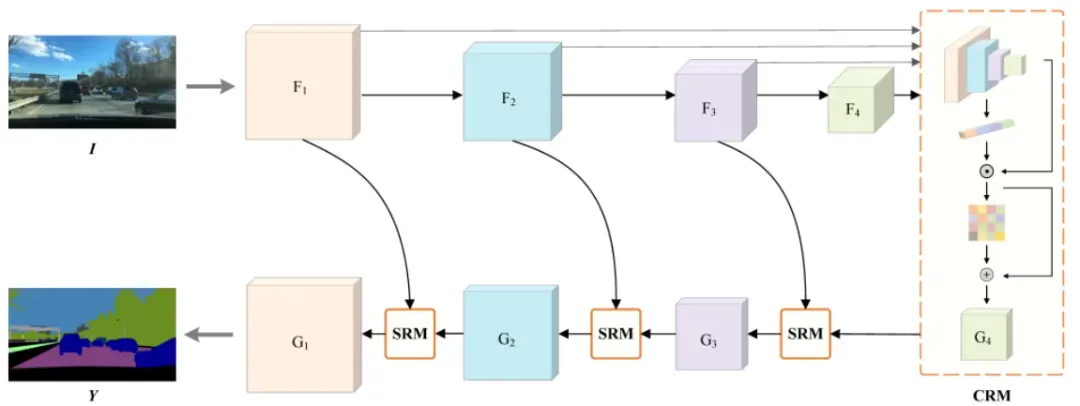
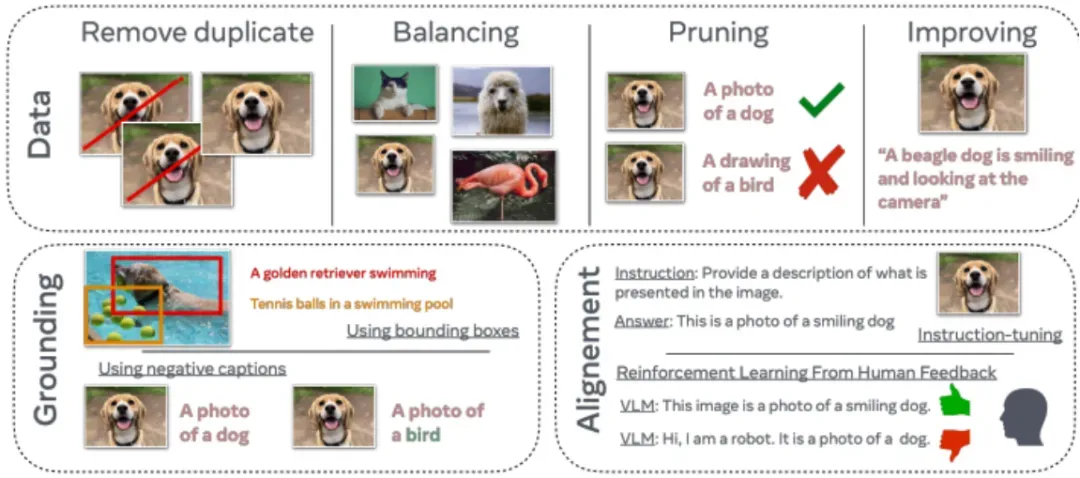
第一天从CMOS传感器和RAW数据起步,手写简化ISP管线,构建泊松-高斯噪声模型,训练轻量神经ISP,对比传统管线与学习式ISP在PSNR、SSIM和下游检测精度上的差距。第二天将图像复原统一为退化模型下的逆问题,从U-Net、Restormer到扩散模型和Mamba架构,逐一攻克去噪、超分、去模糊和低照度增强。第三天深入计算成像:PSF/OTF/MTF建模、编码孔径与无透镜成像、金属透镜,实现可微光学参数与重建网络的端到端联合优化,并探索AI Agent辅助光学设计。第四天聚焦深度估计与三维感知,覆盖单目、双目、RGB-D、NeRF与3D Gaussian Splatting,在KITTI、nuScenes等数据集上完成自动驾驶感知实战,同时打通机器人视觉SLAM与抓取感知流程。第五天升级到视觉基础模型与部署:SAM/SAM 2交互式分割、CLIP开放词表检测、视觉-语言模型辅助驾驶场景理解、BEV感知与多传感器融合,最后将模型导出ONNX、量化到TensorRT,完成端侧推理验证。五天带走一套“成像→复原→感知→部署”的系统工程能力。
适合谁来?
一线的自动驾驶感知、机器人视觉或ISP算法工程师每天跟眩光、雨雾、低光照和运动模糊打交道,想从RAW域和神经ISP层面提升感知鲁棒性。课程从传感器噪声建模一路推到任务驱动ISP优化,再到扩散复原和BEV感知,帮你打通“成像质量”与“任务精度”的因果链。
高校视觉、计算成像或机器人方向的PI和研究生卡在“光学模型如何与网络联合优化”“基础模型如何适配小数据集”“论文实验设计怎么写”。从可微PSF建模到光学-AI联合优化,从SAM/CLIP微调到多模态融合,每一步都是论文方法学模板。
做深度学习出身,想切入“视觉+光学+系统”交叉方向熟悉Transformer和扩散模型,但不懂Bayer阵列、MTF和ISP管线。第一天手写ISP,第三天建模PSF和可微光学,你会看到去噪网络的感受野如何匹配噪声空间相关性,可微前向模型怎样让光学参数跟随任务损失收敛。
企业研发负责人评估神经ISP、可微光学或视觉基础模型的落地价值。五天就是一份高密度可行性验证:传统ISP与神经ISP的实测对比,扩散复原的部署代价,BEV感知架构选型,帮你看清哪些模块可以立刻引入,团队需要补哪块能力。

专题学习目标
1、掌握现代图像信号链:理解 CMOS/CCD 传感器、RAW 数据、Bayer 阵列、噪声模型、白平衡、色彩校正、tone mapping、HDR 和神经 ISP 的基本原理,能够分析图像信号链对自动驾驶感知和机器人视觉任务的影响。

讲师介绍
深度学习计算机视觉与计算成像主讲老师:毕业于国家“985 工程”“211 工程”重点高校。目前在国外顶尖高校课题组,擅长深度学习、大模型与计算成像、计算机视觉、几何光学、波动光学、电磁建模交叉研究领域。近年来发表SCI论文20余篇包括:TCI, TMM, TCSVT, TETCI, ICLR等,授权三项发明专利。研究方向包括:图像处理与计算机视觉、深度学习方法、大语言模型、深度光学设计、几何光学、波动光学、物理驱动的光学成像、跨模态成像研究等。担任TCSVT、TCI、SIVP等多个国际期刊审稿人。
专题一:深度学习计算机视觉与计算成像专题



专题时间
深度学习计算机视觉与计算成像专题
专题费用
报名咨询方式
(请扫描下方二维码)
报名流程:扫码报名→管理员对接→发送正式培训(会议)邀请函→缴费及开具发票。
联系人|陈老师
咨询电话|15652523032(微信同号)
邮箱 | 15652523032@163.com
官方网站 | http://www.dxianai.com

