 夜雨聆风
夜雨聆风首先声明:本内容全部由AI自动生成,内容请自行判断。
无人机目前应用较广,因其成熟、便捷等特性,已经应用在各个行业中。现在换个思路,全部借助AI生成技术方案,探讨一下从机器人在传统行业中应用的数字化业务场景。
桥梁巡检检查机器人是一个典型的 “机-电-软-数” 多学科融合项目,需要兼顾硬件可靠性、控制精度、数据有效性和系统易用性。
在做该类设备研发时,要从总体设计框架、核心技术模块、关键技术要点和难点突破策略四个方面展开分析,为项目提供系统性方向。
一、总体设计框架:“三层三端” 架构
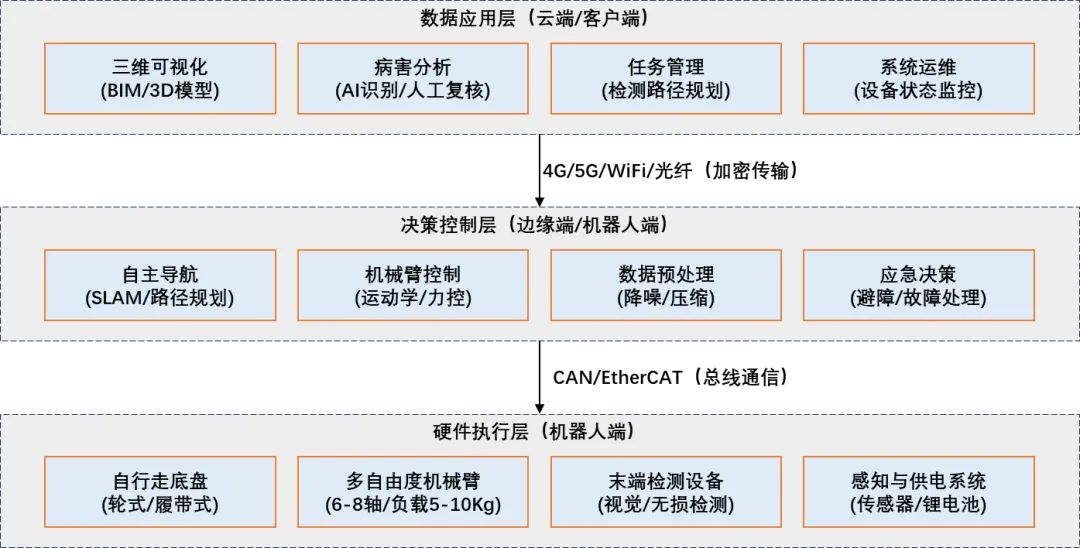
基于桥梁检测的场景特性(户外、大尺度、结构复杂、高精度要求),建议采用 “硬件执行层 - 控制决策层 - 数据应用层” 三层架构,联动 “机器人端 - 边缘端 - 云端” 三端协同工作,实现 “自主移动 - 精准检测 - 数据闭环” 全流程。
1. 总体架构图
2. 核心目标
- 自主化:减少人工干预,实现桥面 / 桥墩的自主巡检(定位精度≤5cm);
- 精准化:机械臂末端定位误差≤1mm,数据采集(如裂缝宽度)精度≤0.1mm;
- 鲁棒性:适应风雨、振动、电磁干扰等户外桥梁环境;
- 易用性:检测数据与桥梁 BIM 模型联动,支持可视化分析与报告生成。
二、核心技术模块设计
1. 硬件执行层:可靠性与适应性优先
(1)自行走底盘设计
- 结构选型:
桥面检测:优先轮式底盘(承重 50-100kg,直径 20-30cm 的橡胶轮,带减震器),适合平坦路面,运动效率高; 桥墩 / 梁底检测:可选履带式底盘(攀爬角度≤30°)或磁吸式底盘(针对钢结构桥梁,需强磁吸附 + 防脱落设计)。 - 驱动系统:
采用伺服电机 + 减速器(支持速度闭环控制),配合编码器实现里程反馈; 底盘宽度≤80cm(适应桥梁人行道宽度),轴距可调,提升转向灵活性。 - 环境适应性:
IP65 级防水防尘,应对雨水、灰尘;底盘离地间隙≥10cm,规避桥面碎石等障碍物。
(2)多自由度机械臂
- 参数设计:
自由度:6-8 轴(满足梁体侧面、支座、裂缝等多角度检测需求); 工作半径:1.5-12m(覆盖桥梁典型构件尺寸,1-3个标准车道);如果采用超级机械臂,可以延长至15米,该项方案需要全部重新编写,将在下一章节中探讨。 末端负载:≥5kg(兼容高清相机、激光测距仪、超声探头、回弹仪等设备); 重复定位精度:≤±0.1mm(确保检测点一致性)。 - 驱动与传动:
关节采用谐波减速器 + 伺服舵机(轻量化、高精度); 关键关节加装力矩传感器(实现力控,避免机械臂与桥梁结构刚性碰撞)。
(3)末端数据采集设备
需根据桥梁病害类型(裂缝、剥落、钢筋锈蚀、渗漏等)配置多模态传感器:
- 集成设计:
- 末端搭载快速更换接口(如磁吸式 / 卡扣式),支持 5 分钟内更换不同检测设备。
(4)感知与供电系统
- 感知模块:
定位:GPS / 北斗双模定位(桥面开阔区域,精度 1-3m)+ UWB 室内定位(桥下无 GPS 区域,精度 10cm 内); 避障:激光雷达(16 线) 扫描周边障碍物(量程 5-10m)+ 超声波传感器(近距离补盲,量程 0.1-2m); 姿态:IMU 惯性测量单元(实时监测底盘倾斜角,避免侧翻,精度 ±0.1°)。 - 供电系统:
采用12V/24V 锂电池组(容量 50-100Ah),支持热插拔,续航≥4 小时(满足中小型桥梁单次检测需求); 配备电源管理模块,动态分配底盘、机械臂、传感器的功耗(如待机时降低机械臂供电)。
2. 控制决策层:实时性与协同性核心
(1)主控制器选型
采用 “异构计算架构”: 主芯片:NVIDIA Jetson AGX Orin(算力 200TOPS,运行 AI 算法、SLAM、路径规划等复杂任务); 从控制器:STM32H7 系列 MCU(负责底盘电机、机械臂关节的实时控制,响应时间≤1ms); 通信:主从设备通过EtherCAT 总线连接(传输速率 100Mbps,延迟≤10μs),确保控制指令实时性。
(2)自主导航与路径规划
- 地图构建:基于激光 SLAM(如 Cartographer) 或视觉 SLAM(如 ORB-SLAM3) 构建桥梁局部地图,融合 GPS 数据生成全局路径;
- 路径规划:采用A*算法规划全局路径(避开护栏、桥墩等固定障碍),动态窗口法(DWA) 实现局部避障(应对突发障碍如施工设备);
- 精准停靠:在检测点附近(如裂缝位置),通过视觉标志物识别(如粘贴 AR 标签)实现厘米级定位停靠。
(3)机械臂控制算法
- 运动学求解:基于DH 参数法建立机械臂运动学模型,通过数值迭代法求解逆运动学(确保末端执行器姿态可控);
- 轨迹规划:采用三次多项式插值生成平滑轨迹(避免关节急动),速度限制≤0.5rad/s(减少振动对检测数据的影响);
- 力位混合控制:接触桥梁表面时(如回弹检测),通过力矩传感器反馈实现力控(压力控制在 5-10N),避免过度施压损坏构件。
(4)数据预处理与应急逻辑
数据预处理:在机器人端对原始数据(如图像、超声信号)进行降噪(如中值滤波)、压缩(如 JPEG 压缩图像),减少传输带宽; 应急处理:预设故障预案(如电机堵转时自动断电、机械臂碰撞时紧急回退、通信中断时本地缓存数据)。
3. 数据应用层:可视化与智能化闭环
(1)数据传输与存储
- 传输方式:
近距离(如桥面到巡检车):WiFi 6(传输速率≥1Gbps,支持高清视频实时回传); 远距离(如跨桥传输):工业级 4G/5G 模块(支持边缘计算节点转发,延迟≤100ms); 关键数据(如检测报告):通过VPN 加密传输,确保数据安全(符合桥梁基础设施保密要求)。 - 存储架构:
机器人端:本地 SD 卡(128-512GB)缓存数据,避免传输中断丢失; 云端:采用OSS或分布式数据库(如 PostgreSQL+PostGIS)存储带地理坐标的检测数据,支持 TB 级数据扩容。
(2)数据处理与 AI 分析
病害识别:训练深度学习模型(如 YOLOv8 检测裂缝位置,U-Net 分割裂缝轮廓),实现自动量化(长度、宽度); 数据融合:将多源检测数据(如 “图像裂缝 + 超声内部缺陷”)关联到桥梁 BIM 模型的对应构件(如梁体编号、支座位置); 趋势分析:基于历史数据(如年度检测结果),用时间序列算法预测病害发展趋势(如裂缝扩展速率)。
(3)可视化展示系统
开发Web 端 3D 可视化平台(基于 Three.js 或 Cesium),实现: 桥梁 BIM 模型、倾斜摄影或激光点云模型与检测数据叠加(点击构件显示病害详情); 机器人实时位置与轨迹回放; 检测报告自动生成(支持 PDF 导出,包含病害照片、量化数据、维修建议)。
三、关键技术要点
多传感器融合定位
问题:桥梁复杂环境(如桥下遮挡、金属结构干扰)导致单一传感器定位失效; 解决方案:采用卡尔曼滤波融合 GPS、IMU、激光雷达数据,动态权重分配(如 GPS 信号好时权重 0.7,无 GPS 时 IMU 权重 0.9),确保定位连续性。 机械臂与底盘协同控制
要求:底盘移动时机械臂保持末端稳定(如拍摄清晰图像); 技术:基于运动学逆补偿,通过 IMU 实时检测底盘姿态变化,反向调整机械臂关节角度(补偿量≤0.5°)。 户外环境下的传感器校准
相机加装温度补偿模块,定期(每 30 分钟)自动校准焦距; 超声设备每次使用前通过标准试块(已知缺陷尺寸)校准。 影响:温度变化(-10℃~50℃)导致相机焦距偏移、超声探头精度下降; 措施: 低带宽下的高效数据传输
图像采用感兴趣区域(ROI)压缩(仅高清传输裂缝区域,背景降质); 非关键数据(如环境参数)采用边缘计算聚合(10 分钟传一次统计值)。 策略:
四、核心难点与突破策略
1. 难点 1:复杂桥梁结构的检测可达性
- 问题:桥梁构件形态多样(如弧形梁底、斜拉索、支座缝隙),机械臂难以全覆盖;
- 突破策略:
机械臂末端设计柔性执行器(如带万向节的检测头),适应 ±30° 倾斜表面; 开发数字孪生预演系统:在虚拟环境中模拟机械臂运动轨迹,提前验证可达性,优化检测路径。
2. 难点 2:户外强干扰下的控制稳定性
- 问题:风雨导致底盘振动、电磁干扰(如高压输电线)影响通信;
- 突破策略:
底盘加装主动减震系统(基于磁流变减震器,实时调整阻尼); 控制信号采用跳频通信(如 433MHz 频段,抗干扰能力提升 30%),关键指令加 CRC 校验。
3. 难点 3:AI 模型的泛化性不足
- 问题:不同桥梁(混凝土、钢结构)、不同光照(逆光、夜晚)下,病害识别准确率下降;
- 突破策略:
构建多场景病害数据集(覆盖 10 + 桥梁类型、50 + 光照条件),采用迁移学习(在通用模型基础上微调); 加入人工复核机制:AI 识别置信度<80% 的结果自动标记,由工程师确认,同时作为新样本训练模型。
4. 难点 4:长续航与轻量化平衡
- 问题:高精度传感器和机械臂功耗高,续航与设备重量矛盾突出;
- 突破策略:
采用轻量化材料(如碳纤维机械臂,重量降低 40%); 开发智能休眠模式:闲置时关闭非必要传感器(如相机、激光雷达),仅保留 IMU 和通信模块,功耗降低 60%。
五、实施路径建议
分阶段研发:
第一阶段(6-12 个月):完成核心硬件原型(轮式底盘 + 6 轴机械臂)+ 基础控制功能(手动遥控 + 简单自主避障); 第二阶段(12-18 个月):开发自主导航与 AI 病害识别,实现中小型桥梁试点检测; 第三阶段(18-24 个月):优化系统鲁棒性,通过行业认证(如桥梁检测设备标准),推向商业化应用。 场景化测试:
实验室测试:模拟桥梁振动、雨水环境,验证设备可靠性; 现场测试:选择典型桥梁(如梁桥、拱桥)进行实地检测,收集反馈迭代优化。 产业链协作:
硬件方面:与伺服电机、传感器厂商联合定制高可靠性部件; 算法方面:与高校合作开发桥梁专用病害识别模型(利用其学术数据资源)。
通过以上设计,可实现桥梁病害检测从 “人工巡检” 到 “机器人自主检测 + AI 分析” 的升级,大幅提升检测效率(预计单次检测时间缩短 50%)和数据准确性(病害漏检率降低至 5% 以下),为桥梁运维提供精准的数据支撑。
