

文档内容
参考答案:
5.D
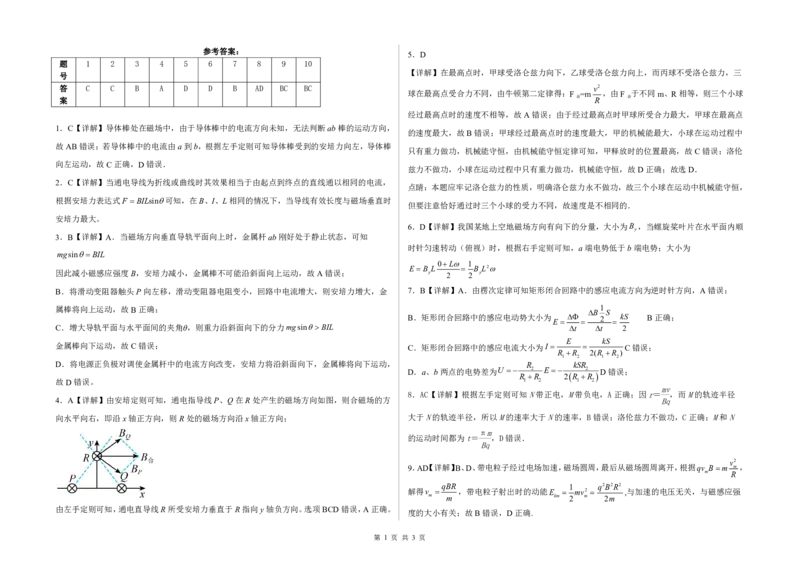
题 1 2 3 4 5 6 7 8 9 10
【详解】在最高点时,甲球受洛仑兹力向下,乙球受洛仑兹力向上,而丙球不受洛仑兹力,三
号
答 C C B A D D B AD BC BC v2
球在最高点受合力不同,由牛顿第二定律得:F =m ,由F 于不同m、R相等,则三个小球
案 合 R 合
经过最高点时的速度不相等,故A错误;由于经过最高点时甲球所受合力最大,甲球在最高点
1.C【详解】导体棒处在磁场中,由于导体棒中的电流方向未知,无法判断ab棒的运动方向,
的速度最大,故B错误;甲球经过最高点时的速度最大,甲的机械能最大,小球在运动过程中
故AB错误;若导体棒中的电流由a到b,根据左手定则可知导体棒受到的安培力向左,导体棒
只有重力做功,机械能守恒,由机械能守恒定律可知,甲释放时的位置最高,故C错误;洛伦
向左运动,故C正确,D错误.
兹力不做功,小球在运动过程中只有重力做功,机械能守恒,故D正确;故选D.
2.C【详解】当通电导线为折线或曲线时其效果相当于由起点到终点的直线通以相同的电流,
点睛:本题应牢记洛仑兹力的性质,明确洛仑兹力永不做功,故三个小球在运动中机械能守恒,
根据安培力表达式F BILsin可知,在B、I、L相同的情况下,当导线有效长度与磁场垂直时
但要注意恰好通过时三个小球的受力不同,故速度是不相同的.
安培力最大。
6.D【详解】我国某地上空地磁场方向有向下的分量,大小为B ,当螺旋桨叶片在水平面内顺
y
3.B【详解】A.当磁场方向垂直导轨平面向上时,金属杆ab刚好处于静止状态,可知
时针匀速转动(俯视)时,根据右手定则可知,a端电势低于b端电势;大小为
mgsinBIL
0L 1
E B L B L2
因此减小磁感应强度B,安培力减小,金属棒不可能沿斜面向上运动,故A错误; y 2 2 y
B.将滑动变阻器触头P向左移,滑动变阻器电阻变小,回路中电流增大,则安培力增大,金 7.B【详解】A.由楞次定律可知矩形闭合回路中的感应电流方向为逆时针方向,A错误;
属棒将向上运动,故B正确;
B
1
S
B.矩形闭合回路中的感应电动势大小为 2 kS B正确;
E
C.增大导轨平面与水平面间的夹角θ,则重力沿斜面向下的分力mgsinBIL t t 2
E kS
金属棒向下运动,故C错误; C.矩形闭合回路中的感应电流大小为I C错误;
R R 2(R R )
1 2 1 2
D.将电源正负极对调使金属杆中的电流方向改变,安培力将沿斜面向下,金属棒将向下运动, R kSR
D.a、b两点的电势差为U
R
2
R
E
2R
2
R
D错误;
故D错误。 1 2 1 2
mv
8.AC【详解】根据左手定则可知N带正电,M带负电,A正确;因r= ,而M的轨迹半径
4.A【详解】由安培定则可知,通电指导线P、Q在R处产生的磁场方向如图,则合磁场的方 Bq
向水平向右,即沿x轴正方向,则R处的磁场方向沿x轴正方向; 大于N的轨迹半径,所以M的速率大于N的速率,B错误;洛伦兹力不做功,C正确;M和N
πm
的运动时间都为t= ,D错误.
Bq
v2
9.AD【详解】B、D、带电粒子经过电场加速,磁场圆周,最后从磁场圆周离开,根据qv B m m ,
m R
qBR 1 q2B2R2
解得v ,带电粒子射出时的动能E mv2 ,与加速的电压无关,与磁感应强
m m km 2 m 2m
由左手定则可知,通电直导线R所受安培力垂直于R指向y轴负方向。选项BCD错误,A正确。
度的大小有关;故B错误,D正确.
第 1 页 共 3 页
{#{QQABAQCUogCgAAJAAAgCQQlgCkMQkACCAQoORAAUoAIBQANABAA=}#}2m
A、C、交变电场的周期与带电粒子运动的周期相等,带电粒子在匀强磁场中运动的周期T ,
qB
与粒子的速度无关,所以加速后交变电场的周期不需改变,不同的带电粒子,在磁场中运动的
周期不等,所以加速不同的带电粒子,一般要调节交变电场的频率;故A正确,C错误.
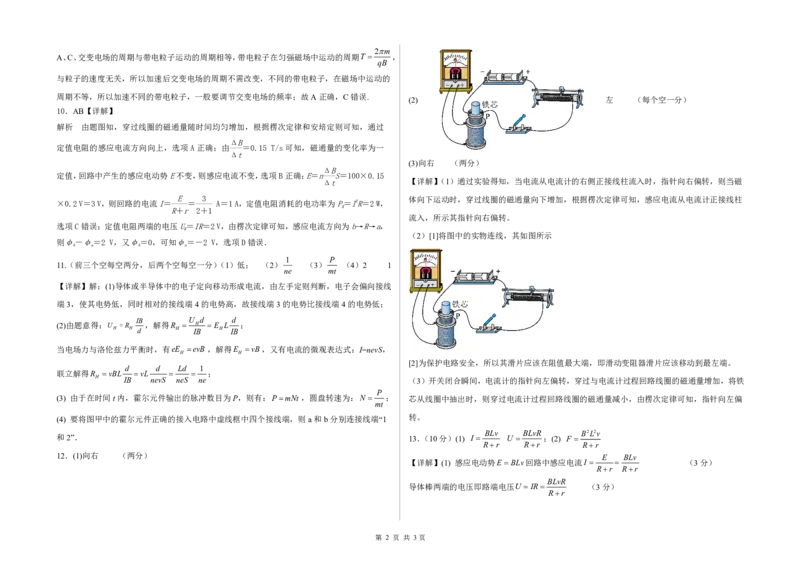
(2) 左 (每个空一分)
10.AB【详解】
解析 由题图知,穿过线圈的磁通量随时间均匀增加,根据楞次定律和安培定则可知,通过
ΔB
定值电阻的感应电流方向向上,选项A正确;由 =0.15 T/s可知,磁通量的变化率为一
Δt
(3)向右 (两分)
ΔB
定值,回路中产生的感应电动势E不变,则感应电流不变,选项B正确;E=n S=100×0.15
Δt 【详解】(1)通过实验得知,当电流从电流计的右侧正接线柱流入时,指针向右偏转,则当磁
E 3 体向下运动时,穿过线圈的磁通量向下增加,根据楞次定律可知,感应电流从电流计正接线柱
×0.2V=3V,则回路的电流I= = A=1A,定值电阻消耗的电功率为P=I2R=2W,
R+r 2+1 R
流入,所示其指针向右偏转。
选项C错误;定值电阻两端的电压U=IR=2V,由楞次定律可知,感应电流方向为b→R→a,
R
(2)[1]将图中的实物连线,其如图所示
则φ-φ=2 V,又φ=0,可知φ=-2 V,选项D错误.
b a b a
1 P
11.(前三个空每空两分,后两个空每空一分)(1)低; (2) (3) (4)2 1
ne mt
【详解】解:(1)导体或半导体中的电子定向移动形成电流,由左手定则判断,电子会偏向接线
端3,使其电势低,同时相对的接线端4的电势高,故接线端3的电势比接线端4的电势低;
IB U d d
(2)由题意得:U =R ,解得R H E L ;
H H d H IB H IB
当电场力与洛伦兹力平衡时,有eE evB ,解得E vB,又有电流的微观表达式:I=nevS,
H H
[2]为保护电路安全,所以其滑片应该在阻值最大端,即滑动变阻器滑片应该移动到最左端。
d d Ld 1
联立解得R vBL vL ;
H IB nevS neS ne (3)开关闭合瞬间,电流计的指针向左偏转,穿过与电流计过程回路线圈的磁通量增加,将铁
P
(3) 由于在时间t内,霍尔元件输出的脉冲数目为P,则有:PmNt ,圆盘转速为:N ; 芯从线圈中抽出时,则穿过电流计过程回路线圈的磁通量减小,由楞次定律可知,指针向左偏
mt
(4) 要将图甲中的霍尔元件正确的接入电路中虚线框中四个接线端,则a和b分别连接线端“1 转。
BLv BLvR B2L2v
和2”. 13.(10分)(1) I U ;(2) F
Rr Rr Rr
12.(1)向右 (两分)
E BLv
【详解】(1) 感应电动势E BLv回路中感应电流I (3分)
Rr Rr
BLvR
导体棒两端的电压即路端电压U IR (3分)
Rr
第 2 页 共 3页
{#{QQABAQCUogCgAAJAAAgCQQlgCkMQkACCAQoORAAUoAIBQANABAA=}#}B2L2v 则安培力方向竖直向上,由平衡条件知,安培力大小为
(2) 导体棒向右匀速运动,有F BIL (4分)
Rr
2m 5m
3BqL
F=mg=1N (3分)
14.(14分)(1) ;(2) ;(3)
Bq 3Bq 3m (2)杆产生的电动势
【详解】(1)粒子在磁场中做匀速圆周运动过程中,由牛顿第二定律有
E=BLv (2分)
mv2
Bqv (2分)
r
根据圆周运动的周期公式 杆中的电流
2r E
T (2分) I= (2分)
v Rr
联立解得
T
2m
(3分) 杆所受安培力
Bq
F =BIL (2分)
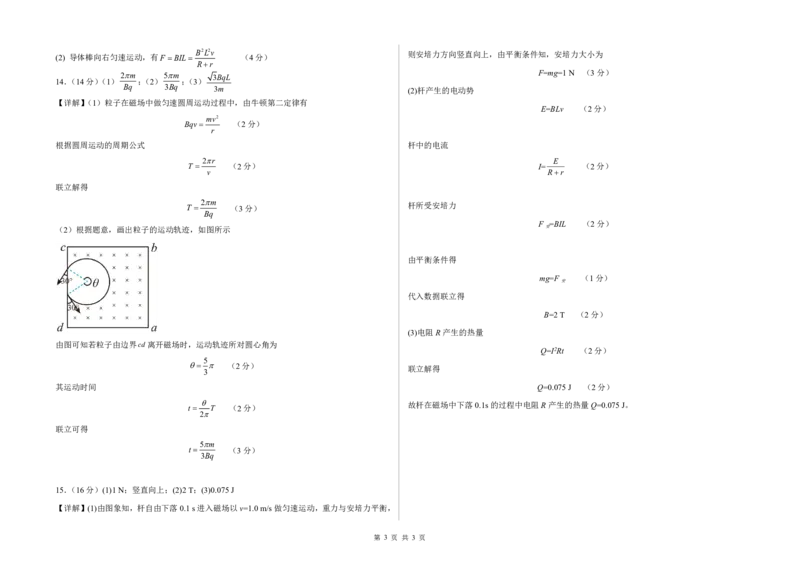
(2)根据题意,画出粒子的运动轨迹,如图所示 安
由平衡条件得
mg=F (1分)
安
代入数据联立得
B=2T (2分)
(3)电阻R产生的热量
由图可知若粒子由边界cd 离开磁场时,运动轨迹所对圆心角为
Q=I2Rt (2分)
5
(2分)
联立解得
3
其运动时间 Q=0.075J (2分)
t
T (2分)
故杆在磁场中下落0.1s的过程中电阻R产生的热量Q=0.075J。
2
联立可得
5m
t (3分)
3Bq
15.(16分)(1)1N;竖直向上;(2)2T;(3)0.075J
【详解】(1)由图象知,杆自由下落0.1s进入磁场以v=1.0m/s做匀速运动,重力与安培力平衡,
第 3 页 共 3 页
{#{QQABAQCUogCgAAJAAAgCQQlgCkMQkACCAQoORAAUoAIBQANABAA=}#}{#{QQABAQCUogCgAAJAAAgCQQlgCkMQkACCAQoORAAUoAIBQANABAA=}#}第 1 页 共 5 页
{#{QQABAQCUogCgAAJAAAgCQQlgCkMQkACCAQoORAAUoAIBQANABAA=}#}

