
文档内容
热点 01 共点力平衡模型
1.命题情境源自生产生活中的与共点力平衡相关的情境,对生活生产中与共点力平衡有关的问题
平衡问题,要能从情境中抽象出物理模型,正确画受力分析图,正确利用平行四边形定则、三角
形定则、三角函数、正弦定理等数学知识解决问题。
2.命题中单个物体、多个物体的平衡问题,经常运用整体法和隔离法,正交分解法,动态分析法。
3.命题较高的考查了运算能力和数形结合能力。
一、有关斜面的平衡问题
1.重力场中的平衡问题
一般平行于斜面和垂直于斜面对物体所受力进行正交分解。
2. 电场、磁场、重力场中的斜面平衡问题
一般平行于斜面和垂直于斜面对物体所受力进行正交分解。注意分析静电力时要注意带电体所带
电量的正负,通电导体在磁场中所受安培力的方向要通过左手定则判断,有时要将立体图转换成平面
图。
二、平衡中的连接体模型
1.轻杆连接体问题
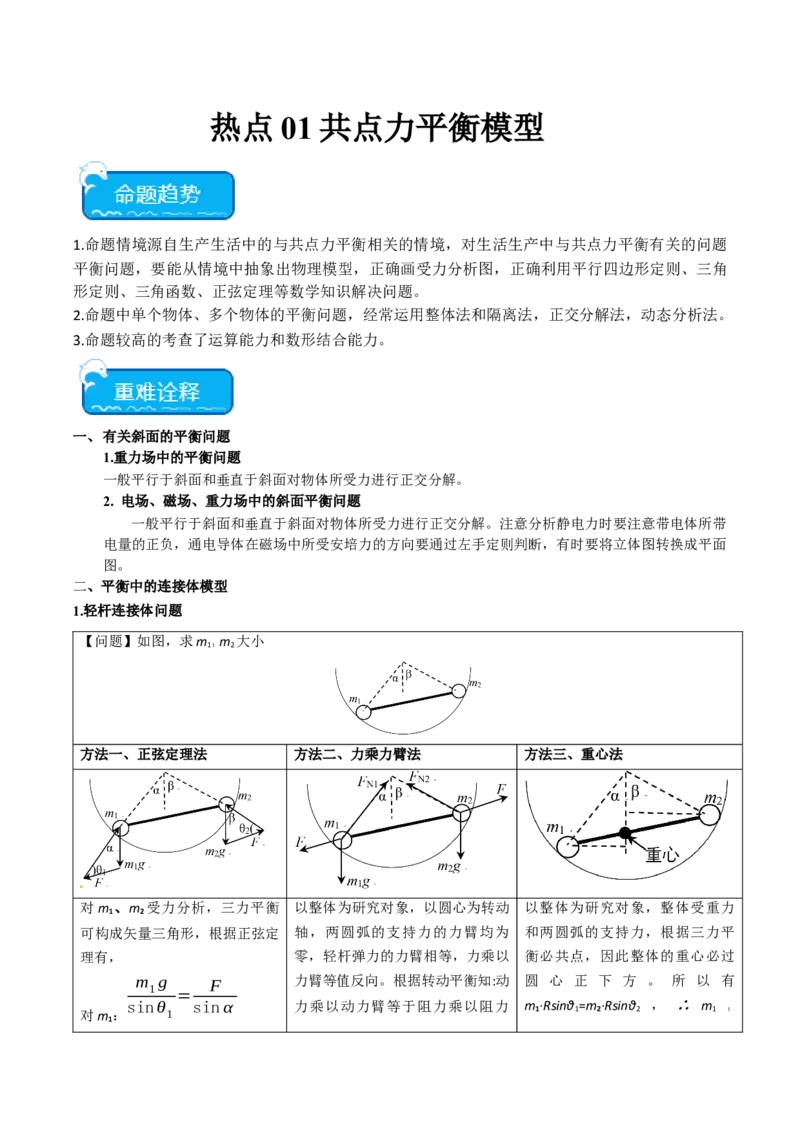
【问题】如图,求m m 大小
1: 2
方法一、正弦定理法 方法二、力乘力臂法 方法三、重心法
对m 、m 受力分析,三力平衡 以整体为研究对象,以圆心为转动 以整体为研究对象,整体受重力
1 2
可构成矢量三角形,根据正弦定 轴,两圆弧的支持力的力臂均为 和两圆弧的支持力,根据三力平
理有, 零,轻杆弹力的力臂相等,力乘以 衡必共点,因此整体的重心必过
m g F 力臂等值反向。根据转动平衡知:动 圆 心 正 下 方 。 所 以 有
1
=
sinθ sinα 力乘以动力臂等于阻力乘以阻力 m ·Rsinθ =m ·Rsinθ , ∴ m
对m : 1 1 1 2 2 1 :
1m 2 g F 臂,即m 1 g·Rsinα=m 2 g·Rsinβ。 m 2 =sinβ:sinα
=
sinθ sinβ ∴m m =sinβ:sinα
对m : 2 1: 2
2
根据等腰三角形有:θ =θ
1 2
联立解得m gsinα=m gsinβ
1 2
∴m m =sinβ:sinα
1: 2
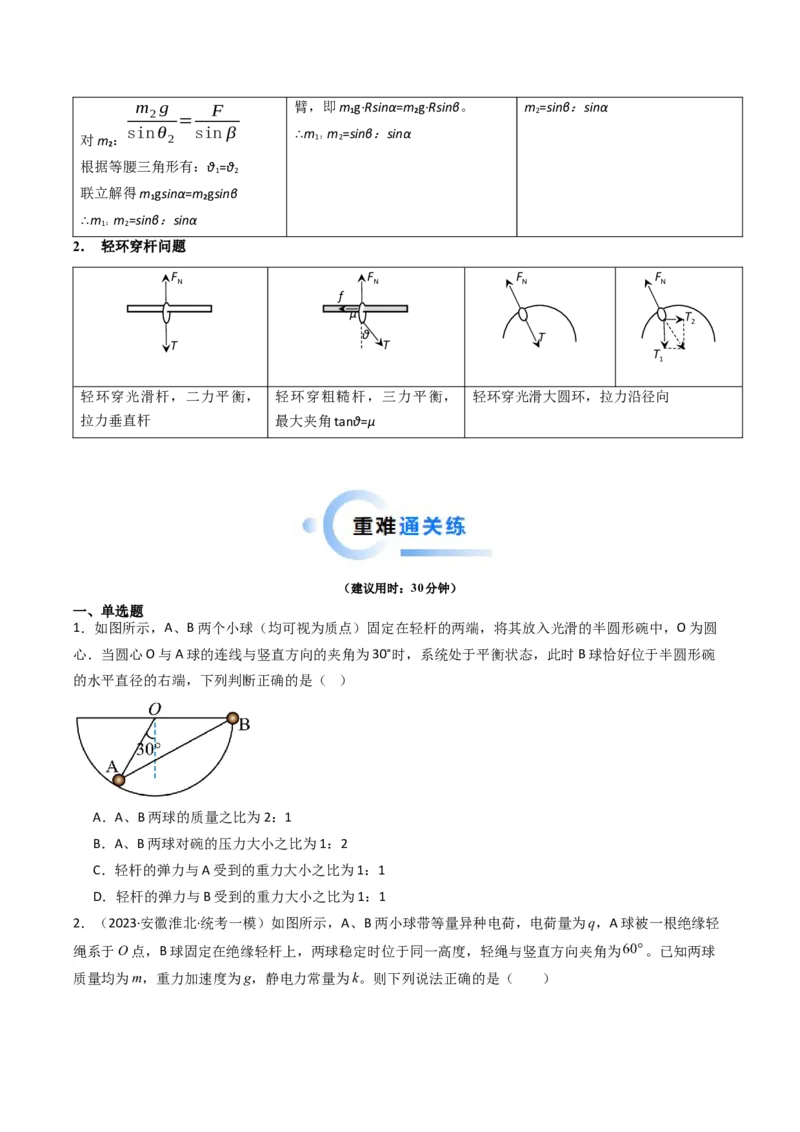
2. 轻环穿杆问题
F F F F
N N N N
f
μ T
2
θ T
T T
T
1
轻环穿光滑杆,二力平衡, 轻环穿粗糙杆,三力平衡, 轻环穿光滑大圆环,拉力沿径向
拉力垂直杆 最大夹角tanθ=μ
(建议用时:30分钟)
一、单选题
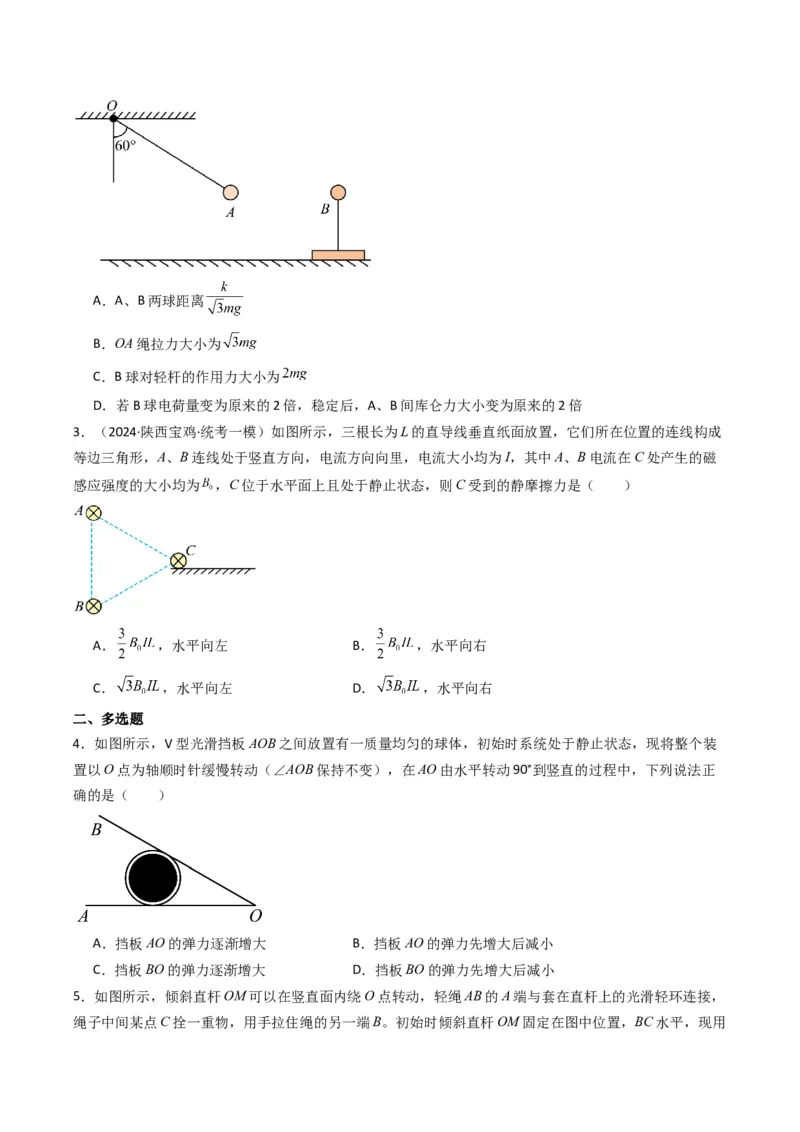
1.如图所示,A、B两个小球(均可视为质点)固定在轻杆的两端,将其放入光滑的半圆形碗中,O为圆
心.当圆心O与A球的连线与竖直方向的夹角为30°时,系统处于平衡状态,此时B球恰好位于半圆形碗
的水平直径的右端,下列判断正确的是( )
A.A、B两球的质量之比为2:1
B.A、B两球对碗的压力大小之比为1:2
C.轻杆的弹力与A受到的重力大小之比为1:1
D.轻杆的弹力与B受到的重力大小之比为1:1
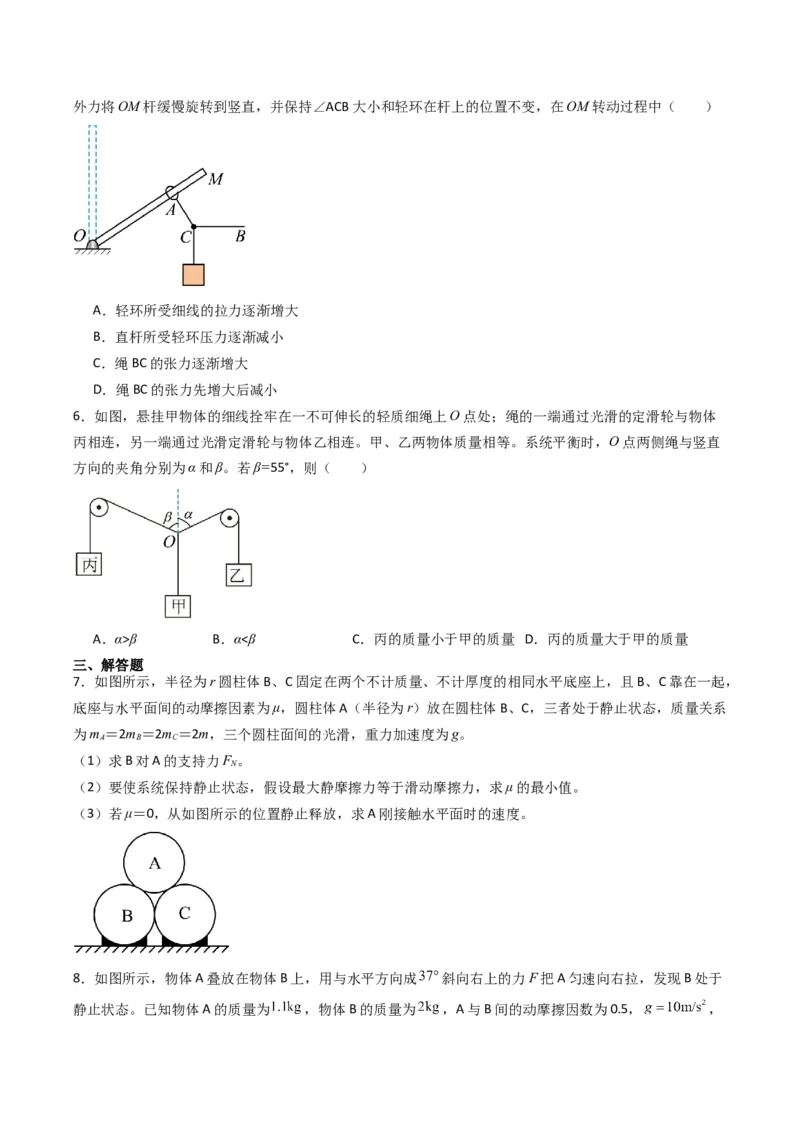
2.(2023·安徽淮北·统考一模)如图所示,A、B两小球带等量异种电荷,电荷量为q,A球被一根绝缘轻
绳系于O点,B球固定在绝缘轻杆上,两球稳定时位于同一高度,轻绳与竖直方向夹角为 。已知两球
质量均为m,重力加速度为g,静电力常量为k。则下列说法正确的是( )A.A、B两球距离
B.OA绳拉力大小为
C.B球对轻杆的作用力大小为
D.若B球电荷量变为原来的2倍,稳定后,A、B间库仑力大小变为原来的2倍
3.(2024·陕西宝鸡·统考一模)如图所示,三根长为L的直导线垂直纸面放置,它们所在位置的连线构成
等边三角形,A、B连线处于竖直方向,电流方向向里,电流大小均为I,其中A、B电流在C处产生的磁
感应强度的大小均为 ,C位于水平面上且处于静止状态,则C受到的静摩擦力是( )
A. ,水平向左 B. ,水平向右
C. ,水平向左 D. ,水平向右
二、多选题
4.如图所示,V型光滑挡板AOB之间放置有一质量均匀的球体,初始时系统处于静止状态,现将整个装
置以O点为轴顺时针缓慢转动(∠AOB保持不变),在AO由水平转动90°到竖直的过程中,下列说法正
确的是( )
A.挡板AO的弹力逐渐增大 B.挡板AO的弹力先增大后减小
C.挡板BO的弹力逐渐增大 D.挡板BO的弹力先增大后减小
5.如图所示,倾斜直杆OM可以在竖直面内绕O点转动,轻绳AB的A端与套在直杆上的光滑轻环连接,
绳子中间某点C拴一重物,用手拉住绳的另一端B。初始时倾斜直杆OM固定在图中位置,BC水平,现用外力将OM杆缓慢旋转到竖直,并保持∠ACB大小和轻环在杆上的位置不变,在OM转动过程中( )
A.轻环所受细线的拉力逐渐增大
B.直杆所受轻环压力逐渐减小
C.绳BC的张力逐渐增大
D.绳BC的张力先增大后减小
6.如图,悬挂甲物体的细线拴牢在一不可伸长的轻质细绳上O点处;绳的一端通过光滑的定滑轮与物体
丙相连,另一端通过光滑定滑轮与物体乙相连。甲、乙两物体质量相等。系统平衡时,O点两侧绳与竖直
方向的夹角分别为α和β。若β=55°,则( )
A.α>β B.α<β C.丙的质量小于甲的质量 D.丙的质量大于甲的质量
三、解答题
7.如图所示,半径为r圆柱体B、C固定在两个不计质量、不计厚度的相同水平底座上,且B、C靠在一起,
底座与水平面间的动摩擦因素为μ,圆柱体A(半径为r)放在圆柱体B、C,三者处于静止状态,质量关系
为m =2m =2m =2m,三个圆柱面间的光滑,重力加速度为g。
A B C
(1)求B对A的支持力F 。
N
(2)要使系统保持静止状态,假设最大静摩擦力等于滑动摩擦力,求μ的最小值。
(3)若μ=0,从如图所示的位置静止释放,求A刚接触水平面时的速度。
8.如图所示,物体A叠放在物体B上,用与水平方向成 斜向右上的力F把A匀速向右拉,发现B处于
静止状态。已知物体A的质量为 ,物体B的质量为 ,A与B间的动摩擦因数为0.5, ,, 。求:
(1)力F的大小;
(2)B对A的摩擦力大小和方向;
(3)地面对B的合力大小。
(建议用时:30分钟)
一、单选题
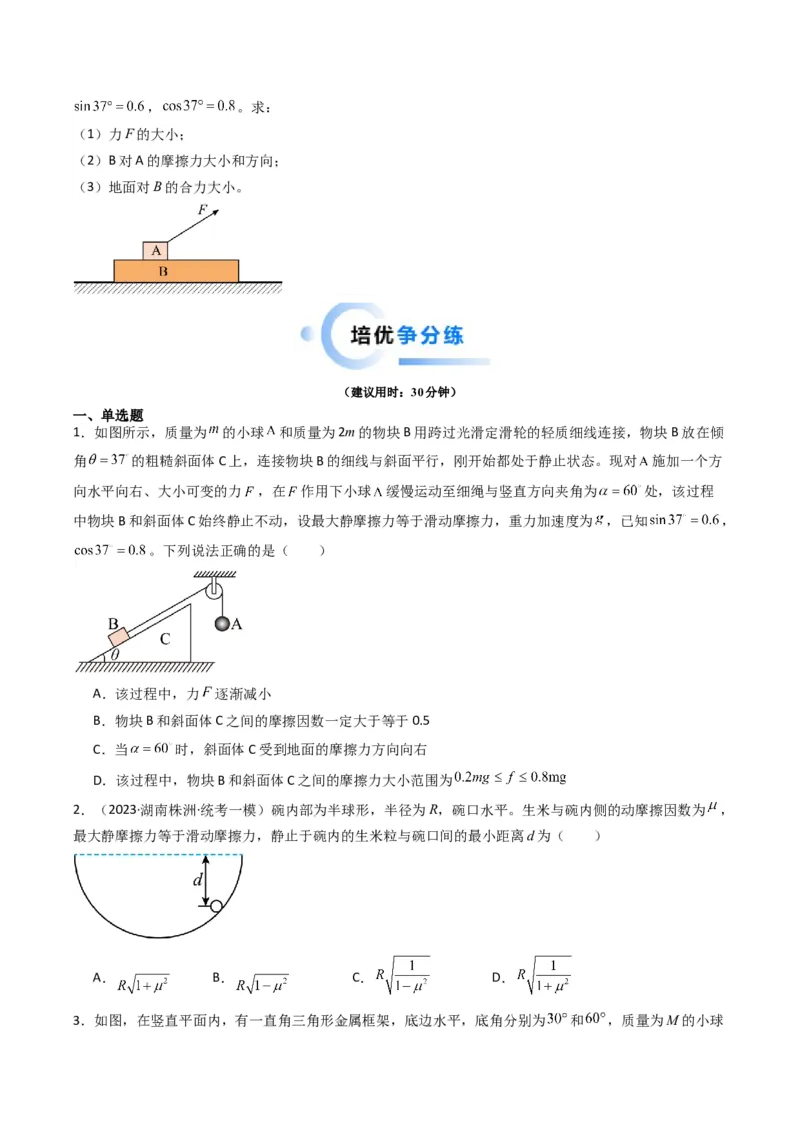
1.如图所示,质量为 的小球 和质量为2m的物块B用跨过光滑定滑轮的轻质细线连接,物块B放在倾
角 的粗糙斜面体C上,连接物块B的细线与斜面平行,刚开始都处于静止状态。现对 施加一个方
向水平向右、大小可变的力 ,在 作用下小球 缓慢运动至细绳与竖直方向夹角为 处,该过程
中物块B和斜面体C始终静止不动,设最大静摩擦力等于滑动摩擦力,重力加速度为 ,已知 ,
。下列说法正确的是( )
A.该过程中,力 逐渐减小
B.物块B和斜面体C之间的摩擦因数一定大于等于0.5
C.当 时,斜面体C受到地面的摩擦力方向向右
D.该过程中,物块B和斜面体C之间的摩擦力大小范围为
2.(2023·湖南株洲·统考一模)碗内部为半球形,半径为R,碗口水平。生米与碗内侧的动摩擦因数为 ,
最大静摩擦力等于滑动摩擦力,静止于碗内的生米粒与碗口间的最小距离d为( )
A. B. C. D.
3.如图,在竖直平面内,有一直角三角形金属框架,底边水平,底角分别为 和 ,质量为M的小球a和质量为m的小球b套在框架上,可以无摩擦地滑动,a、b之间用不可伸长的细线连接,当系统处于平
衡时,细线与金属框架形成的夹角 ,已知 ,则小球a、b的质量之比 为
( )
A. B. C. D.
4.如图所示,两个质量均为m的小球用轻质细杆连接静止于内壁光滑的半球形碗内,杆及碗口平面均水
平,碗的半径及两小球之间的距离均为R,不计小球半径,则碗对每个小球的支持力大小为( )
A. mg B. mg C. mg D.2mg
二、多选题
5.如图在一半径为R的表面光滑的半球形容器的球心O点,用长为 的绝缘细线悬挂一质量为 、电荷
量为 的小球A,在容器内放置一质量为m、电荷量为 的小球B,已知B与容器绝缘。两球在如图所
示的位置处于平衡状态,此时细线与竖直方向的夹角 。下列说法正确的是( )
A.容器对小球B的支持力等于细线对小球A的拉力
B.容器对小球B的支持力等于细线对小球A拉力的2倍
C.细线对小球A的拉力为小球A重力的
D.两小球间的库仑力为小球A重力的
6.水平放置的光滑绝缘环上套有三个带电小球,小球可在环上自由移动。如图所示是小球平衡后的可能
位置。图甲中三个小球构成一个钝角三角形,A点是钝角的顶点。图乙中三个小球构成一个锐角三角形,
其中三角形边长 。下列说法正确的是( )A.图甲中A、B两个小球一定带异种电荷B.图甲中三个小球一定带等量电荷
C.图乙中三个小球一定带同种电荷 D.图乙中三个小球带电荷量的大小为
三、解答题
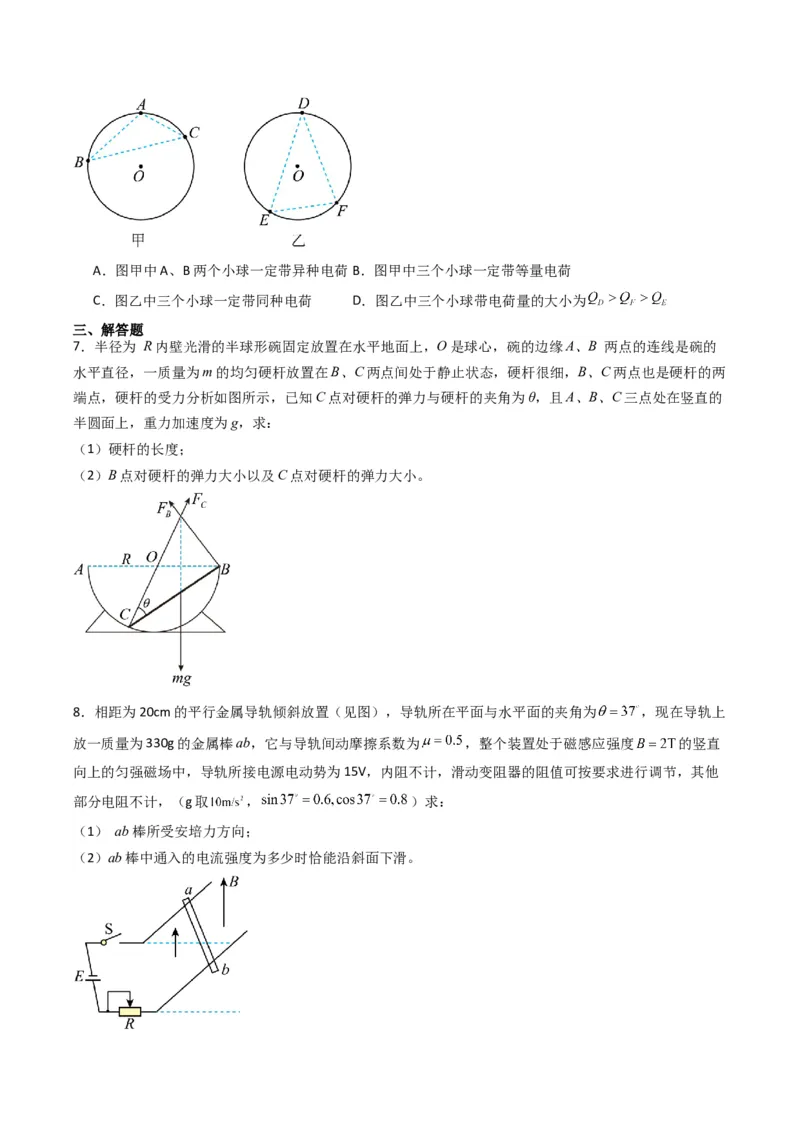
7.半径为 R内壁光滑的半球形碗固定放置在水平地面上,O是球心,碗的边缘A、B 两点的连线是碗的
水平直径,一质量为m的均匀硬杆放置在B、C两点间处于静止状态,硬杆很细,B、C两点也是硬杆的两
端点,硬杆的受力分析如图所示,已知C点对硬杆的弹力与硬杆的夹角为θ,且A、B、C三点处在竖直的
半圆面上,重力加速度为g,求:
(1)硬杆的长度;
(2)B点对硬杆的弹力大小以及C点对硬杆的弹力大小。
8.相距为20cm的平行金属导轨倾斜放置(见图),导轨所在平面与水平面的夹角为 ,现在导轨上
放一质量为330g的金属棒ab,它与导轨间动摩擦系数为 ,整个装置处于磁感应强度 的竖直
向上的匀强磁场中,导轨所接电源电动势为15V,内阻不计,滑动变阻器的阻值可按要求进行调节,其他
部分电阻不计,(g取 , )求:
(1) ab棒所受安培力方向;
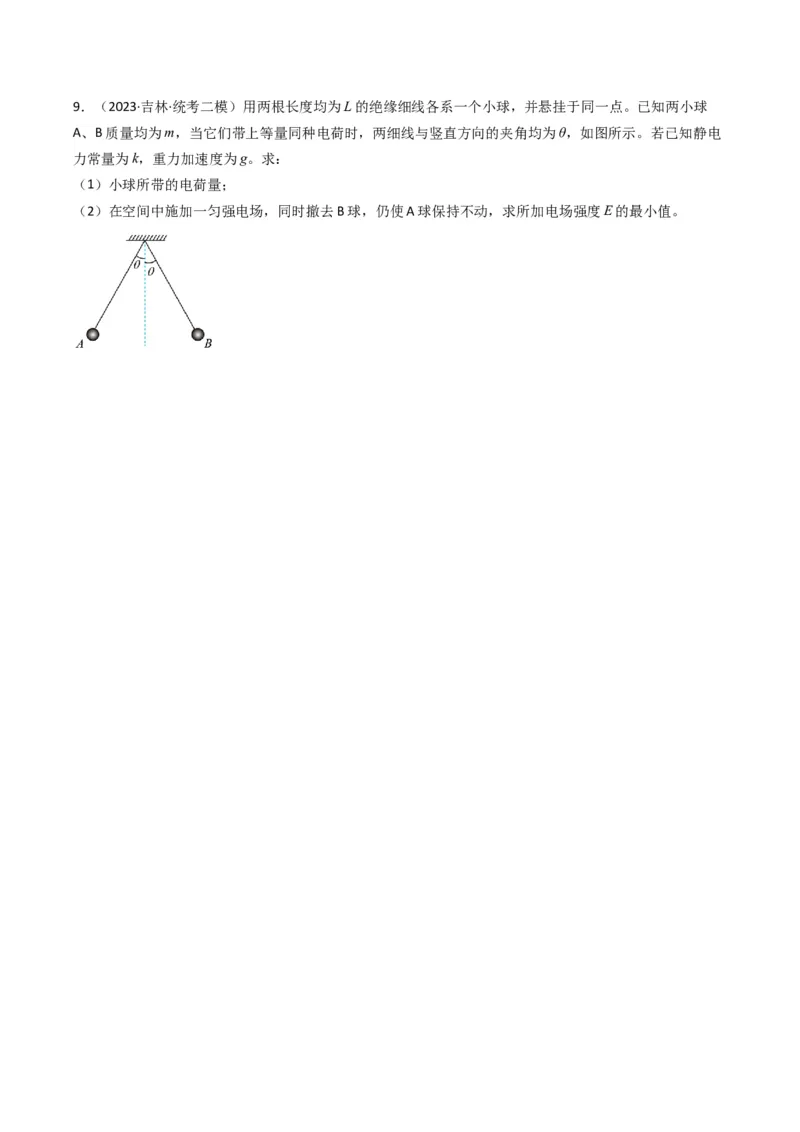
(2)ab棒中通入的电流强度为多少时恰能沿斜面下滑。9.(2023·吉林·统考二模)用两根长度均为L的绝缘细线各系一个小球,并悬挂于同一点。已知两小球
A、B质量均为m,当它们带上等量同种电荷时,两细线与竖直方向的夹角均为θ,如图所示。若已知静电
力常量为k,重力加速度为g。求:
(1)小球所带的电荷量;
(2)在空间中施加一匀强电场,同时撤去B球,仍使A球保持不动,求所加电场强度E的最小值。
