
文档内容
题型必刷练 1 “3 实验+4 计算”
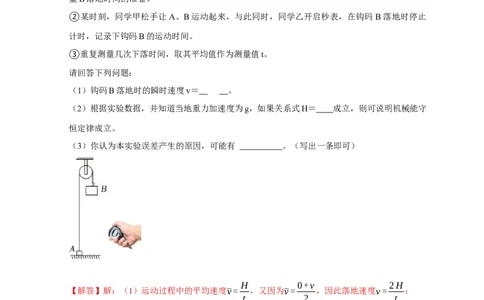
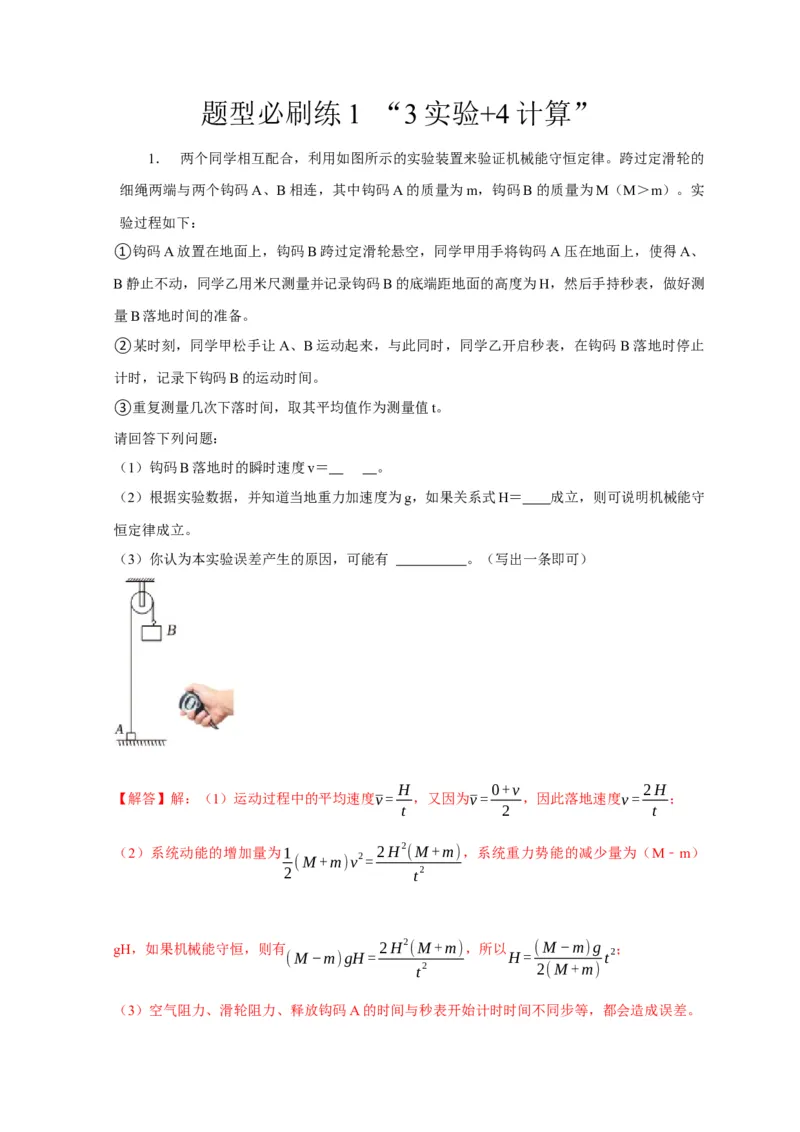
1. 两个同学相互配合,利用如图所示的实验装置来验证机械能守恒定律。跨过定滑轮的
细绳两端与两个钩码A、B相连,其中钩码A的质量为m,钩码B的质量为M(M>m)。实
验过程如下:
①钩码A放置在地面上,钩码B跨过定滑轮悬空,同学甲用手将钩码A压在地面上,使得A、
B静止不动,同学乙用米尺测量并记录钩码B的底端距地面的高度为H,然后手持秒表,做好测
量B落地时间的准备。
②某时刻,同学甲松手让A、B运动起来,与此同时,同学乙开启秒表,在钩码 B落地时停止
计时,记录下钩码B的运动时间。
③重复测量几次下落时间,取其平均值作为测量值t。
请回答下列问题:
(1)钩码B落地时的瞬时速度v= 。
(2)根据实验数据,并知道当地重力加速度为g,如果关系式H= 成立,则可说明机械能守
恒定律成立。
(3)你认为本实验误差产生的原因,可能有 。(写出一条即可)
H 0+v 2H
【解答】解:(1)运动过程中的平均速度v= ,又因为v= ,因此落地速度v= ;
t 2 t
(2)系统动能的增加量为1 2H2 (M+m),系统重力势能的减少量为(M﹣m)
(M+m)v2=
2 t2
gH,如果机械能守恒,则有 2H2 (M+m),所以 (M−m)g ;
(M−m)gH= H= t2
t2 2(M+m)
(3)空气阻力、滑轮阻力、释放钩码A的时间与秒表开始计时时间不同步等,都会造成误差。2H (M−m)g
故答案为:(1) ,(2) t2,(3)释放钩码A的时间与秒表开始计时时间不同
t 2(M+m)
步、空气阻力、滑轮与绳子摩擦力等都会造成误差。
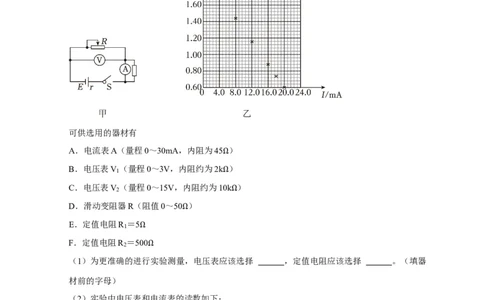
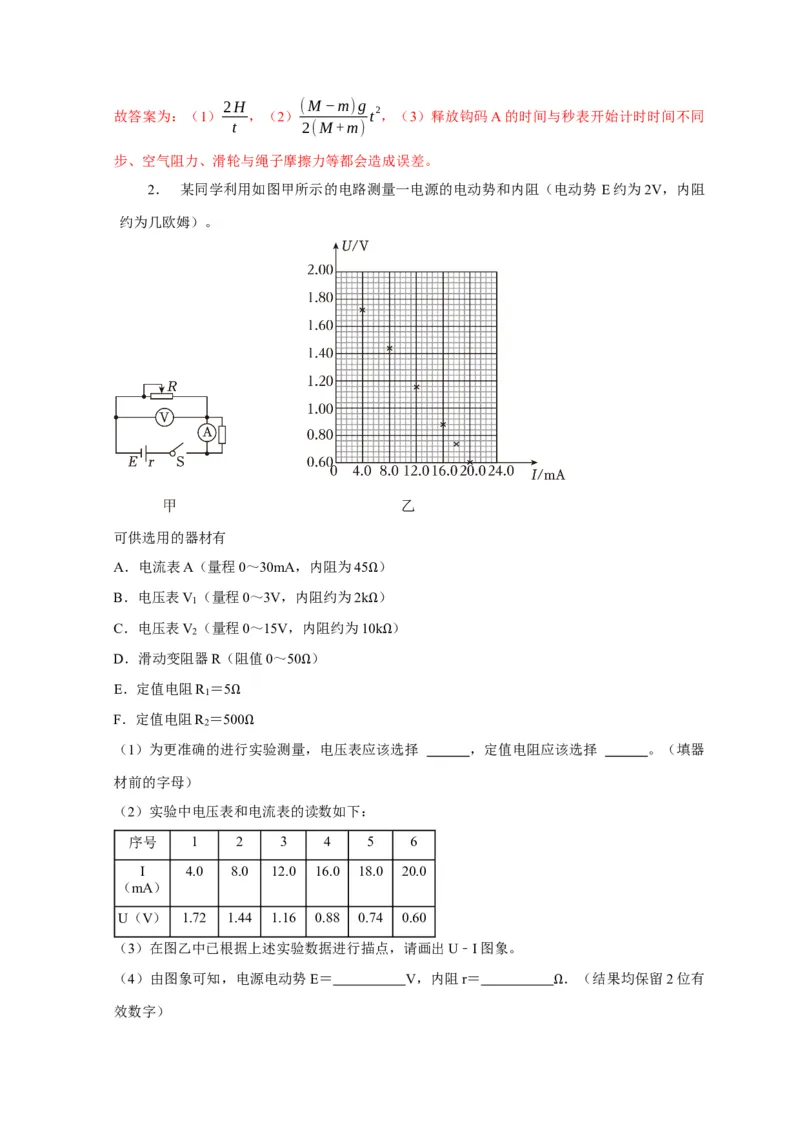
2. 某同学利用如图甲所示的电路测量一电源的电动势和内阻(电动势 E约为2V,内阻
约为几欧姆)。
可供选用的器材有
A.电流表A(量程0~30mA,内阻为45 )
B.电压表V
1
(量程0~3V,内阻约为2kΩ)
C.电压表V (量程0~15V,内阻约为1Ω0k )
2
D.滑动变阻器R(阻值0~50 ) Ω
E.定值电阻R 1 =5 Ω
F.定值电阻R =50Ω0
2
(1)为更准确的进行Ω实验测量,电压表应该选择 ,定值电阻应该选择 。(填器
材前的字母)
(2)实验中电压表和电流表的读数如下:
序号 1 2 3 4 5 6
I 4.0 8.0 12.0 16.0 18.0 20.0
(mA)
U(V) 1.72 1.44 1.16 0.88 0.74 0.60
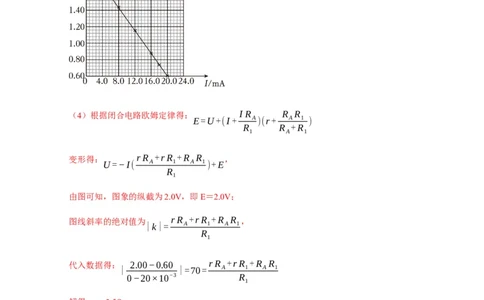
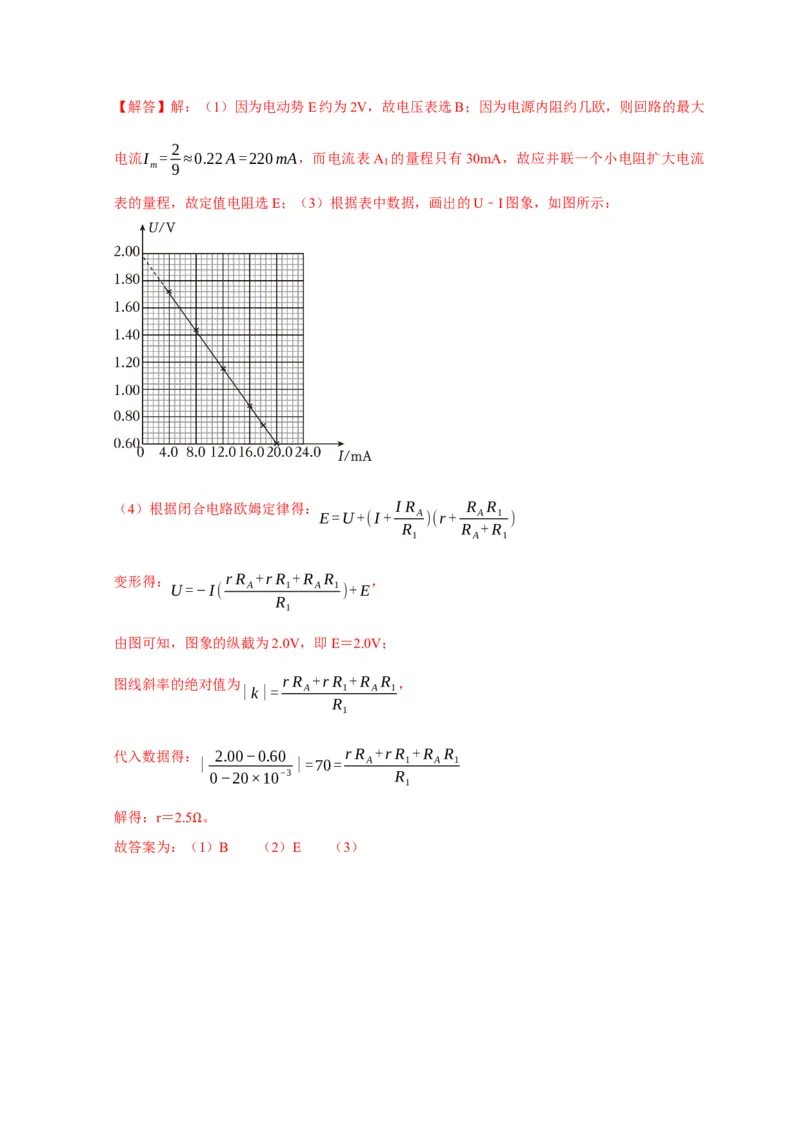
(3)在图乙中已根据上述实验数据进行描点,请画出U﹣I图象。
(4)由图象可知,电源电动势E= V,内阻r= .(结果均保留2位有
效数字) Ω【解答】解:(1)因为电动势E约为2V,故电压表选B;因为电源内阻约几欧,则回路的最大
2
电流I = ≈0.22A=220mA,而电流表A 的量程只有30mA,故应并联一个小电阻扩大电流
m 9 1
表的量程,故定值电阻选E;(3)根据表中数据,画出的U﹣I图象,如图所示:
(4)根据闭合电路欧姆定律得: I R R R
E=U+(I+ A )(r+ A 1 )
R R +R
1 A 1
变形得: rR +rR +R R ,
U=−I( A 1 A 1 )+E
R
1
由图可知,图象的纵截为2.0V,即E=2.0V;
图线斜率的绝对值为 rR +rR +R R ,
|k|= A 1 A 1
R
1
代入数据得: 2.00−0.60 rR +rR +R R
| |=70= A 1 A 1
0−20×10−3 R
1
解得:r=2.5 。
故答案为:(Ω1)B (2)E (3)(4)2.0;2.5
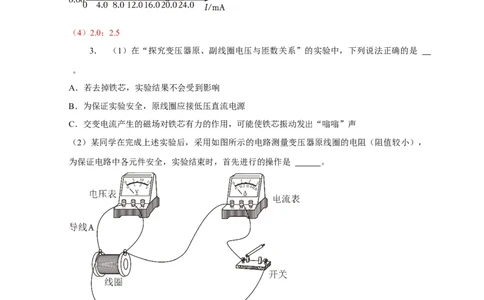
3. (1)在“探究变压器原、副线圈电压与匝数关系”的实验中,下列说法正确的是
。
A.若去掉铁芯,实验结果不会受到影响
B.为保证实验安全,原线圈应接低压直流电源
C.交变电流产生的磁场对铁芯有力的作用,可能使铁芯振动发出“嗡嗡”声
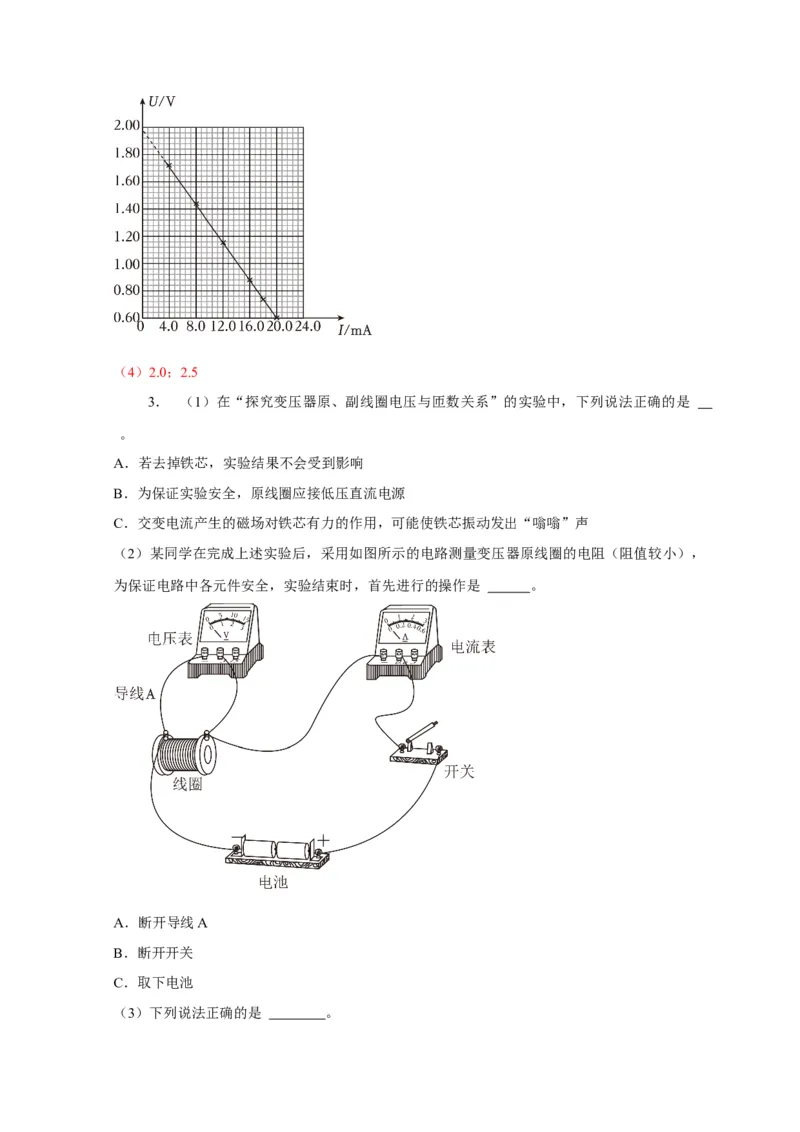
(2)某同学在完成上述实验后,采用如图所示的电路测量变压器原线圈的电阻(阻值较小),
为保证电路中各元件安全,实验结束时,首先进行的操作是 。
A.断开导线A
B.断开开关
C.取下电池
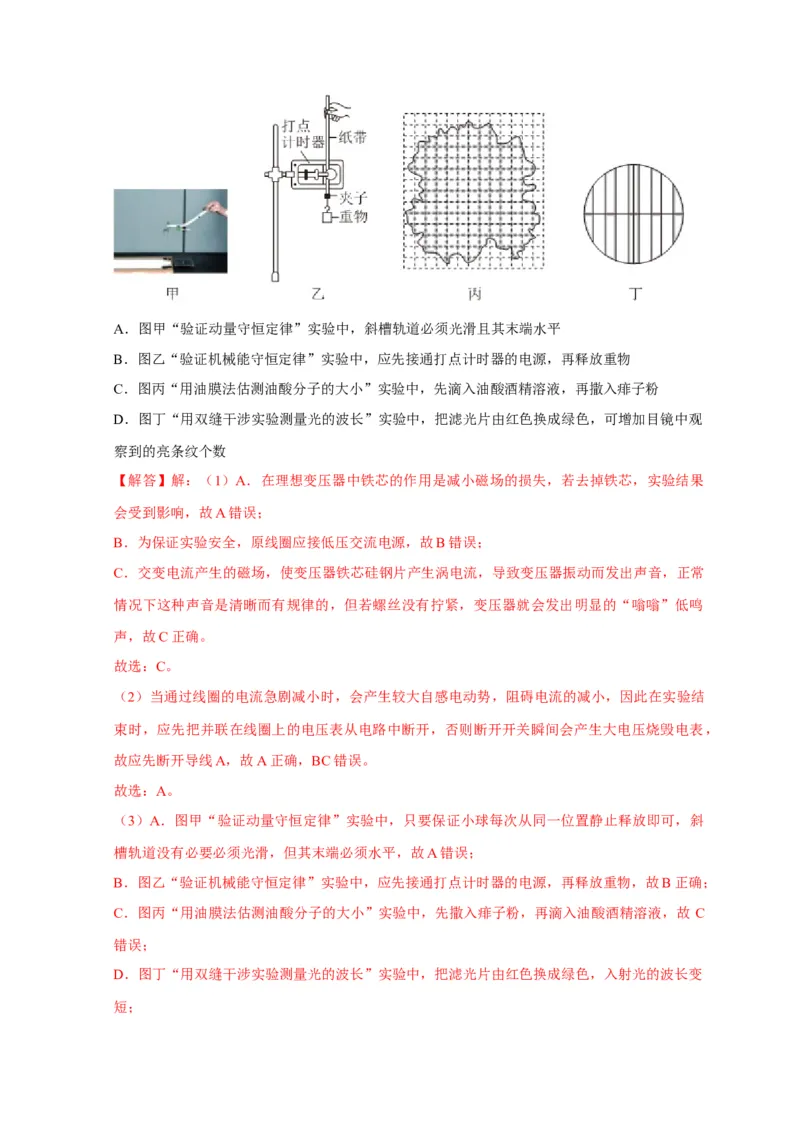
(3)下列说法正确的是 。A.图甲“验证动量守恒定律”实验中,斜槽轨道必须光滑且其末端水平
B.图乙“验证机械能守恒定律”实验中,应先接通打点计时器的电源,再释放重物
C.图丙“用油膜法估测油酸分子的大小”实验中,先滴入油酸酒精溶液,再撒入痱子粉
D.图丁“用双缝干涉实验测量光的波长”实验中,把滤光片由红色换成绿色,可增加目镜中观
察到的亮条纹个数
【解答】解:(1)A.在理想变压器中铁芯的作用是减小磁场的损失,若去掉铁芯,实验结果
会受到影响,故A错误;
B.为保证实验安全,原线圈应接低压交流电源,故B错误;
C.交变电流产生的磁场,使变压器铁芯硅钢片产生涡电流,导致变压器振动而发出声音,正常
情况下这种声音是清晰而有规律的,但若螺丝没有拧紧,变压器就会发出明显的“嗡嗡”低鸣
声,故C正确。
故选:C。
(2)当通过线圈的电流急剧减小时,会产生较大自感电动势,阻碍电流的减小,因此在实验结
束时,应先把并联在线圈上的电压表从电路中断开,否则断开开关瞬间会产生大电压烧毁电表,
故应先断开导线A,故A正确,BC错误。
故选:A。
(3)A.图甲“验证动量守恒定律”实验中,只要保证小球每次从同一位置静止释放即可,斜
槽轨道没有必要必须光滑,但其末端必须水平,故A错误;
B.图乙“验证机械能守恒定律”实验中,应先接通打点计时器的电源,再释放重物,故B正确;
C.图丙“用油膜法估测油酸分子的大小”实验中,先撒入痱子粉,再滴入油酸酒精溶液,故 C
错误;
D.图丁“用双缝干涉实验测量光的波长”实验中,把滤光片由红色换成绿色,入射光的波长变
短;L
根据双缝干涉条纹间距公式Δx= λ可知,相邻条纹间距减小,可增加目镜中观察到的亮条纹个
d
数,故D正确。
故选:BD。
故答案为:(1)C;(2)A;(3)BD。
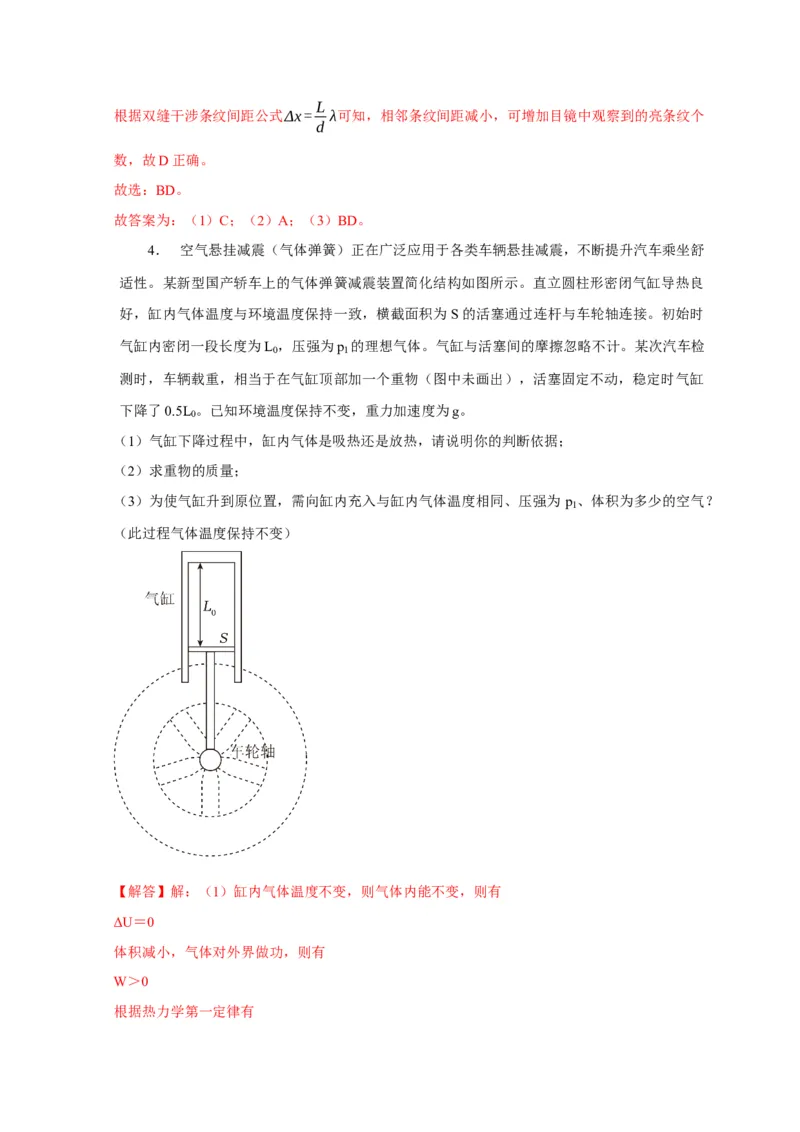
4. 空气悬挂减震(气体弹簧)正在广泛应用于各类车辆悬挂减震,不断提升汽车乘坐舒
适性。某新型国产轿车上的气体弹簧减震装置简化结构如图所示。直立圆柱形密闭气缸导热良
好,缸内气体温度与环境温度保持一致,横截面积为 S的活塞通过连杆与车轮轴连接。初始时
气缸内密闭一段长度为L ,压强为p 的理想气体。气缸与活塞间的摩擦忽略不计。某次汽车检
0 1
测时,车辆载重,相当于在气缸顶部加一个重物(图中未画出),活塞固定不动,稳定时气缸
下降了0.5L 。已知环境温度保持不变,重力加速度为g。
0
(1)气缸下降过程中,缸内气体是吸热还是放热,请说明你的判断依据;
(2)求重物的质量;
(3)为使气缸升到原位置,需向缸内充入与缸内气体温度相同、压强为 p 、体积为多少的空气?
1
(此过程气体温度保持不变)
【解答】解:(1)缸内气体温度不变,则气体内能不变,则有
ΔU=0
体积减小,气体对外界做功,则有
W>0
根据热力学第一定律有ΔU=W+Q
可知
Q<0
故气体放热。
(2)设气缸下降0.5L 后,缸内气体压强为p ,对缸内气体,根据玻意耳定律有
0 2
1
p SL =p SL
1 0 22 0
解得
p =2p
2 1
设大气压强为p 、气缸质量为m ,未载重时,对气缸有
0 0
m g+p S=p S
0 0 1
载重时,对气缸和重物有
m g+p S+mg=p S
0 0 2
联立解得
p S
m= 1
g
(3)设充入的气体体积为V,根据玻意耳定律有
p (L S+V)=p L S
1 0 2 0
解得
V=L S
0
答:(1)气缸下降过程中,缸内气体是放热过程,判断依据见解析;
p S
(2)重物的质量为 1 ;
g
(3)为使气缸升到原位置,需向缸内充入与缸内气体温度相同、压强为p 、体积为L S的空气。
1 0
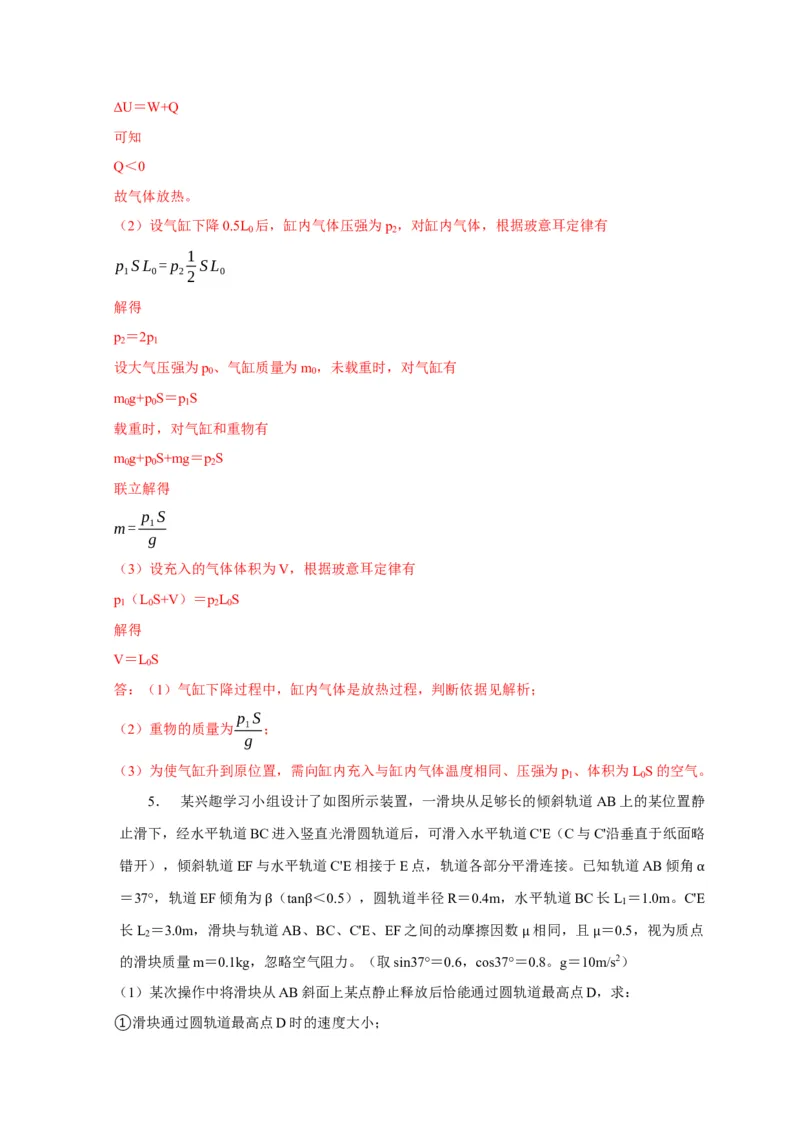
5. 某兴趣学习小组设计了如图所示装置,一滑块从足够长的倾斜轨道AB上的某位置静
止滑下,经水平轨道BC进入竖直光滑圆轨道后,可滑入水平轨道C'E(C与C'沿垂直于纸面略
错开),倾斜轨道EF与水平轨道C'E相接于E点,轨道各部分平滑连接。已知轨道AB倾角
=37°,轨道EF倾角为 (tan <0.5),圆轨道半径R=0.4m,水平轨道BC长L =1.0m。C'Eα
1
长L =3.0m,滑块与轨β道AB、β BC、C'E、EF之间的动摩擦因数 相同,且 =0.5,视为质点
2
的滑块质量m=0.1kg,忽略空气阻力。(取sin37°=0.6,cos37°=μ0.8。g=10μm/s2)
(1)某次操作中将滑块从AB斜面上某点静止释放后恰能通过圆轨道最高点D,求:
①滑块通过圆轨道最高点D时的速度大小;②滑块刚到圆轨道最低点C'时,滑块对圆轨道的压力。
(2)若滑块能到达E点,并能滑向EF轨道,求:
①滑块到达E点时滑块动能E 与滑块释放点到B点距离x之间的函数关系;
k
②滑块最终静止在轨道EF上的位置与滑块释放位置之间连线与水平面的夹角的正切值。
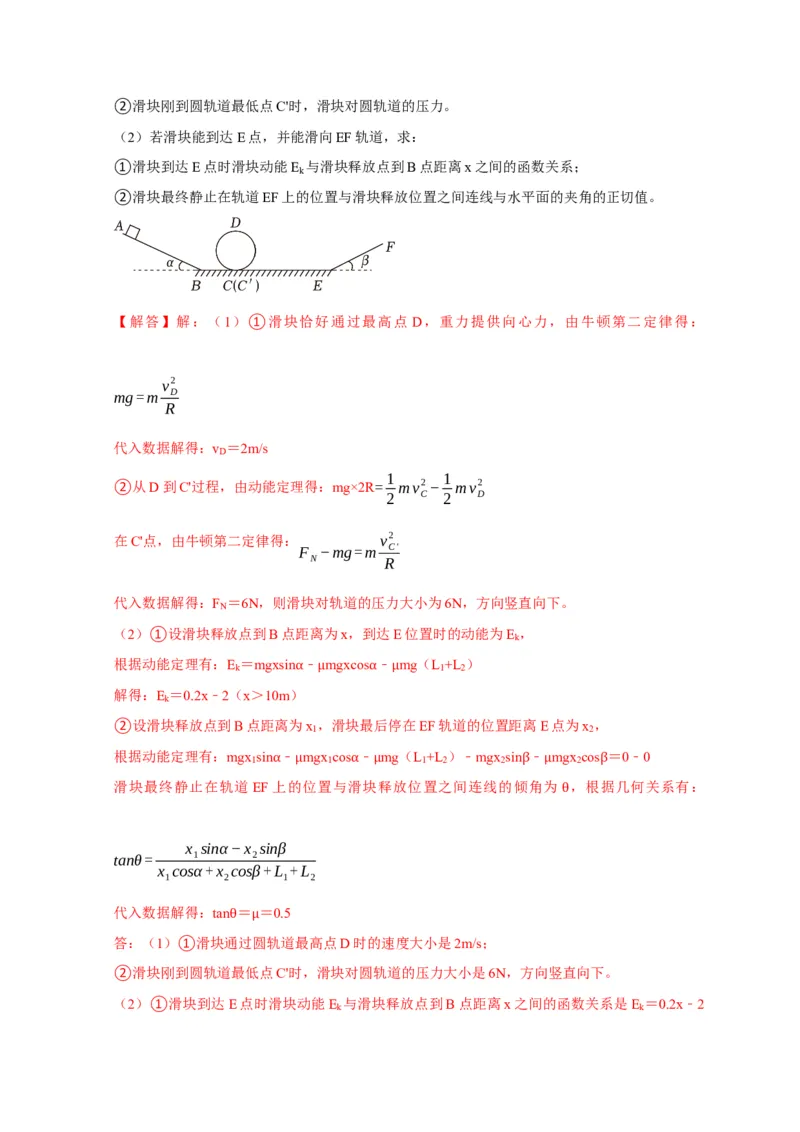
【解答】解:(1)①滑块恰好通过最高点 D,重力提供向心力,由牛顿第二定律得:
v2
mg=m D
R
代入数据解得:v =2m/s
D
1 1
②从D到C'过程,由动能定理得:mg×2R= mv2− mv2
2 C 2 D
在C'点,由牛顿第二定律得: v2
F −mg=m C'
N R
代入数据解得:F =6N,则滑块对轨道的压力大小为6N,方向竖直向下。
N
(2)①设滑块释放点到B点距离为x,到达E位置时的动能为E ,
k
根据动能定理有:E =mgxsin ﹣ mgxcos ﹣ mg(L +L )
k 1 2
解得:E =0.2x﹣2(x>10m)α μ α μ
k
②设滑块释放点到B点距离为x ,滑块最后停在EF轨道的位置距离E点为x ,
1 2
根据动能定理有:mgx sin ﹣ mgx cos ﹣ mg(L +L )﹣mgx sin ﹣ mgx cos =0﹣0
1 1 1 2 2 2
滑块最终静止在轨道EF上α 的μ位置与滑α块μ释放位置之间连线的倾β角为μ ,根β据几何关系有:
θ
x sinα−x sinβ
tanθ= 1 2
x cosα+x cosβ+L +L
1 2 1 2
代入数据解得:tan = =0.5
答:(1)①滑块通θ过μ圆轨道最高点D时的速度大小是2m/s;
②滑块刚到圆轨道最低点C'时,滑块对圆轨道的压力大小是6N,方向竖直向下。
(2)①滑块到达E点时滑块动能E 与滑块释放点到B点距离x之间的函数关系是E =0.2x﹣2
k k(x>10m);
②滑块最终静止在轨道EF上的位置与滑块释放位置之间连线与水平面的夹角的正切值是0.5。
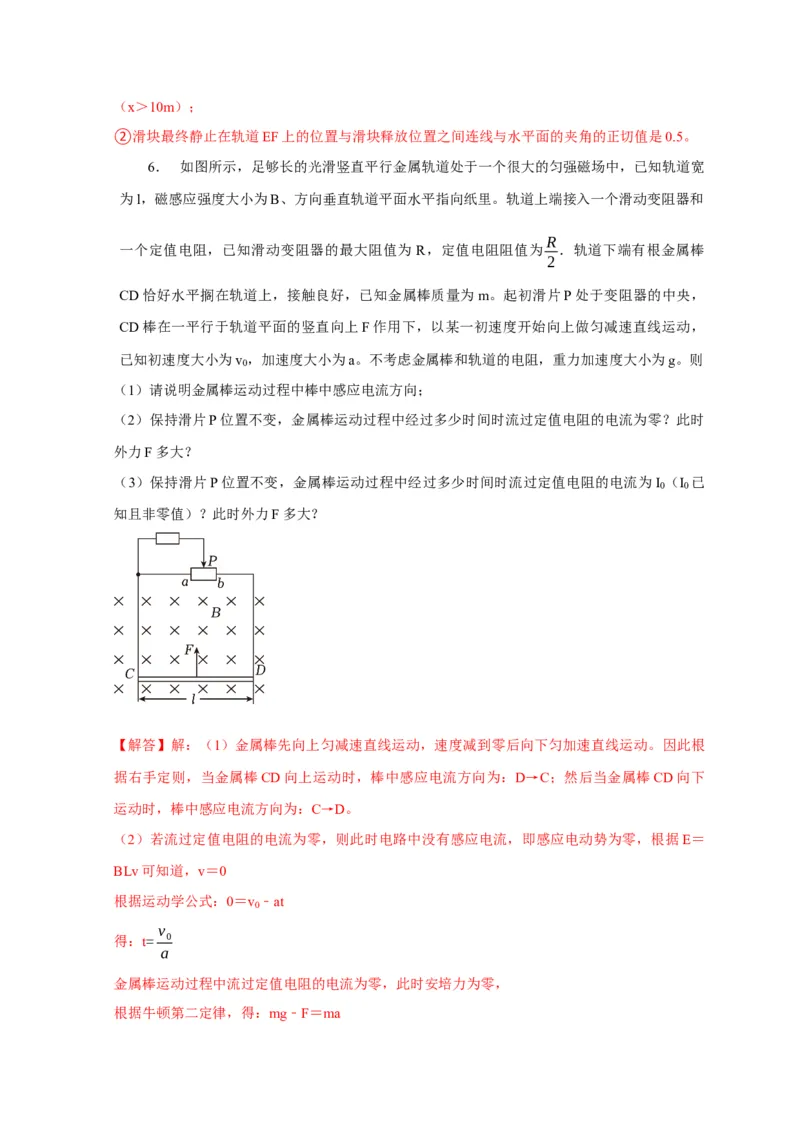
6. 如图所示,足够长的光滑竖直平行金属轨道处于一个很大的匀强磁场中,已知轨道宽
为l,磁感应强度大小为B、方向垂直轨道平面水平指向纸里。轨道上端接入一个滑动变阻器和
R
一个定值电阻,已知滑动变阻器的最大阻值为 R,定值电阻阻值为 .轨道下端有根金属棒
2
CD恰好水平搁在轨道上,接触良好,已知金属棒质量为m。起初滑片P处于变阻器的中央,
CD棒在一平行于轨道平面的竖直向上F作用下,以某一初速度开始向上做匀减速直线运动,
已知初速度大小为v ,加速度大小为a。不考虑金属棒和轨道的电阻,重力加速度大小为g。则
0
(1)请说明金属棒运动过程中棒中感应电流方向;
(2)保持滑片P位置不变,金属棒运动过程中经过多少时间时流过定值电阻的电流为零?此时
外力F多大?
(3)保持滑片P位置不变,金属棒运动过程中经过多少时间时流过定值电阻的电流为I (I 已
0 0
知且非零值)?此时外力F多大?
【解答】解:(1)金属棒先向上匀减速直线运动,速度减到零后向下匀加速直线运动。因此根
据右手定则,当金属棒CD向上运动时,棒中感应电流方向为:D→C;然后当金属棒CD向下
运动时,棒中感应电流方向为:C→D。
(2)若流过定值电阻的电流为零,则此时电路中没有感应电流,即感应电动势为零,根据E=
BLv可知道,v=0
根据运动学公式:0=v ﹣at
0
v
得:t= 0
a
金属棒运动过程中流过定值电阻的电流为零,此时安培力为零,
根据牛顿第二定律,得:mg﹣F=ma此时外力为:F=mg﹣ma
R 3
(3)当滑片处于中央时,并联电阻为 R,回路总电阻为 R.流过定值电阻的电流为I 时,此
0
4 4
时干路电流为2I 。
0
3 3 E 3I R
感应电动势为:E=2I • R= I R,根据E=BLv得:v= = 0
0 0
4 2 BL 2BL
讨论:金属棒先向上匀减速直线运动,后向下匀加速直线运动。
3I R
①当v
0
< 0 时,只在向下加速过程中,才出现流过定值电阻的电流为 I根据运动学
2BL
公式得到,经过时间流过定值电阻的电流为I 。
0
此时,根据牛顿第二定律得:
mg﹣F﹣F =ma,此时F=mg﹣ma﹣F =mg﹣ma﹣2I LB
A A 0
v 3I R
此时t= 0+ 0
a 2BLa
3I R
②当v = 0 时,在t =0以及向下加速过程中,出现流过定值电阻的电流为I 。
0 1 0
2BL
t =0时,棒向上运动,mg+F ﹣F=ma,得到此时F=mg+F ﹣ma=mg﹣ma+2I LB
1 A A 0
2v
t = 0时,棒向下运动,mg﹣F﹣F =ma,此时F=mg﹣ma﹣F =mg﹣ma﹣2I LB
2 A A 0
a
3I R
3I R v − 0
③当v> 0 ,t 0 2BL
0 2BL =
a
时,向上和向下过程中都出现流过定值电阻的电流为I
0
向上过程中,此时 mg+F ﹣F=ma,得到此时 F=mg+F ﹣ma=mg﹣ma+2I LB 此时 t
A A 0
3I R
v − 0
0 2BL
=
a
向下过程中,经过时间,此时mg﹣F﹣F =ma,此时F=mg﹣ma﹣FA=mg﹣ma﹣2I LB 此时
A 0
v 3I R
t= 0+ 0
a 2BLa
答:(1)金属棒CD向上运动时,棒中感应电流方向为:D→C;然后当金属棒CD向下运动时,
棒中感应电流方向为:C→D。v
(2)金属棒运动过程中经过时间为 0时流过定值电阻的电流为零,此时外力Fmg﹣ma。
a
3I R v 3I R
(3)①当v< 0 时,时t= 0+ 0 ,F=mg﹣ma﹣2I LB
0 0
2BL a 2BLa
3I R
②当v = 0 时,在t =0 F=mg﹣ma+2I LB
0 1 0
2BL
2v
t = 0时,F=mg﹣ma﹣2I LB
2 0
a
3I R
3I R v − 0
③当v> 0 时,向上F=mg﹣ma+2I LB 此时t 0 2BL
0 2BL 0 =
a
v 3I R
向下过程F=mg﹣ma﹣2I LB 此时:t= 0+ 0
0
a 2BLa
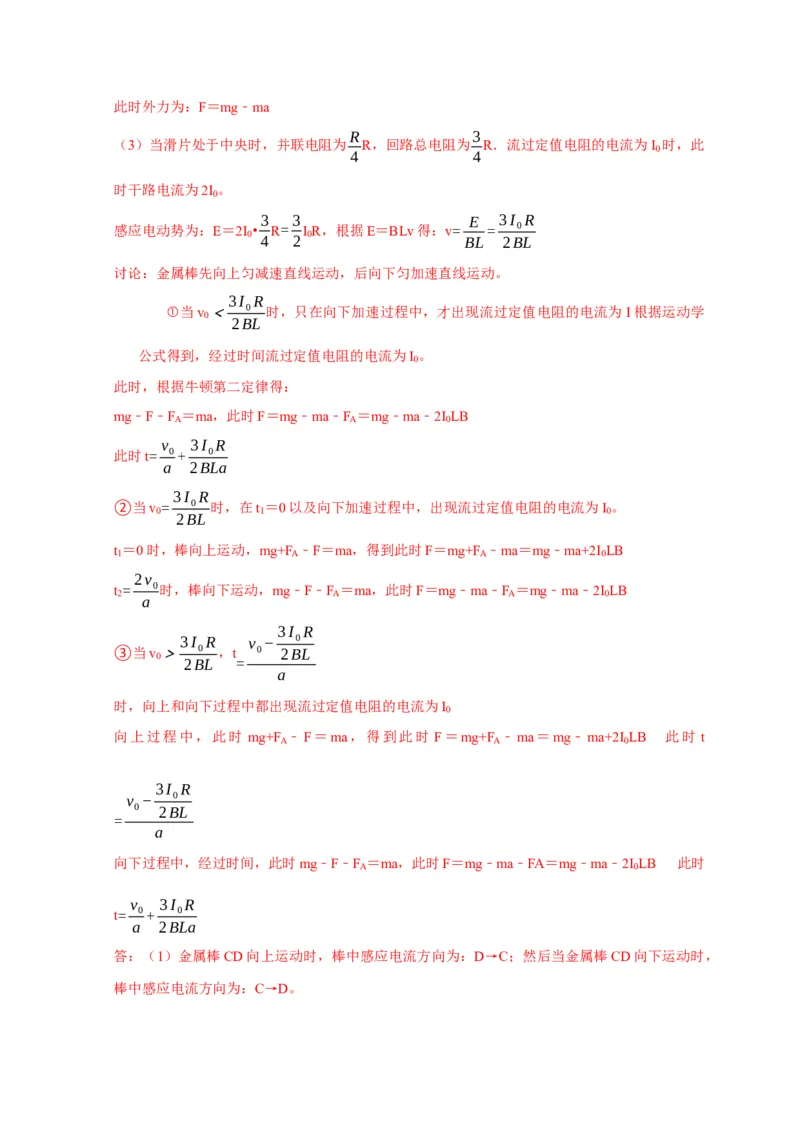
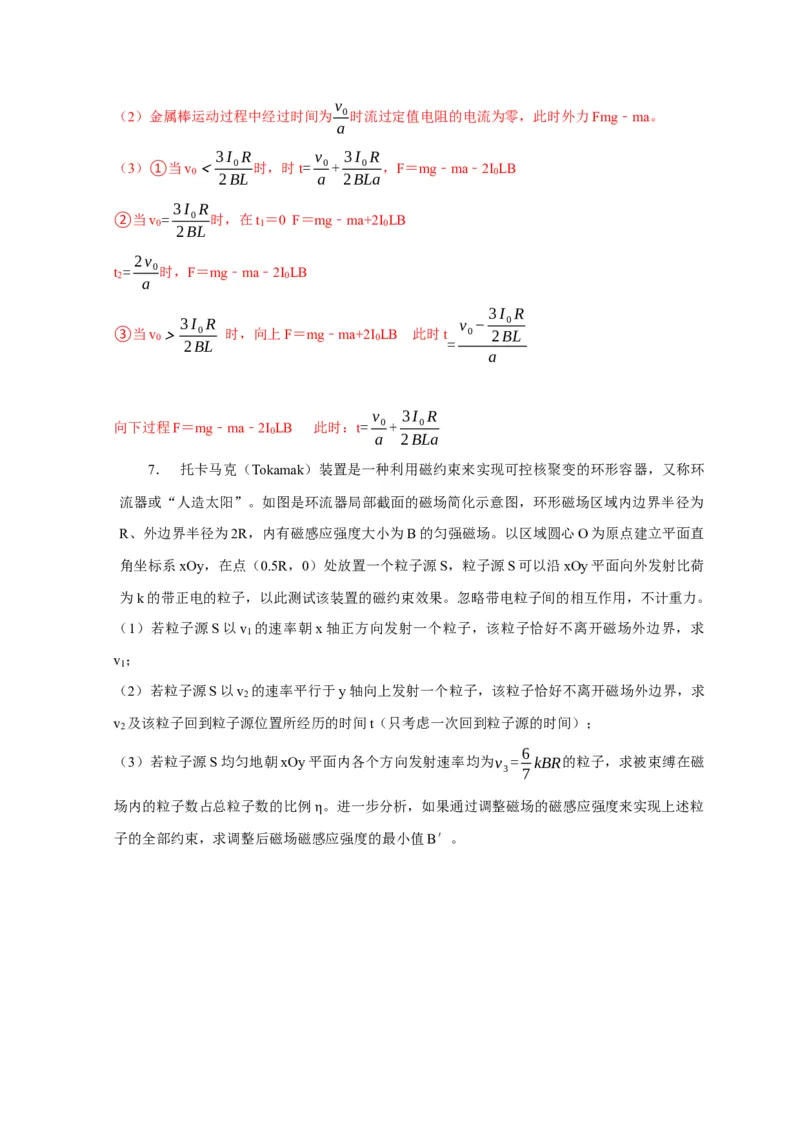
7. 托卡马克(Tokamak)装置是一种利用磁约束来实现可控核聚变的环形容器,又称环
流器或“人造太阳”。如图是环流器局部截面的磁场简化示意图,环形磁场区域内边界半径为
R、外边界半径为2R,内有磁感应强度大小为B的匀强磁场。以区域圆心O为原点建立平面直
角坐标系xOy,在点(0.5R,0)处放置一个粒子源S,粒子源S可以沿xOy平面向外发射比荷
为k的带正电的粒子,以此测试该装置的磁约束效果。忽略带电粒子间的相互作用,不计重力。
(1)若粒子源S以v 的速率朝x轴正方向发射一个粒子,该粒子恰好不离开磁场外边界,求
1
v ;
1
(2)若粒子源S以v 的速率平行于y轴向上发射一个粒子,该粒子恰好不离开磁场外边界,求
2
v 及该粒子回到粒子源位置所经历的时间t(只考虑一次回到粒子源的时间);
2
6
(3)若粒子源S均匀地朝xOy平面内各个方向发射速率均为v = kBR的粒子,求被束缚在磁
3 7
场内的粒子数占总粒子数的比例 。进一步分析,如果通过调整磁场的磁感应强度来实现上述粒
子的全部约束,求调整后磁场磁感η应强度的最小值B′。【解答】解:(1)粒子运动轨迹如图1所示,设粒子的轨迹半径为r ,由几何关系,有
1
(2R−r ) 2=r2+R2
1 1
解得
3
r = R
1 4
又
mv2
qv B= 1
1 r
1
解得
3
v = kBR
1 4
图1
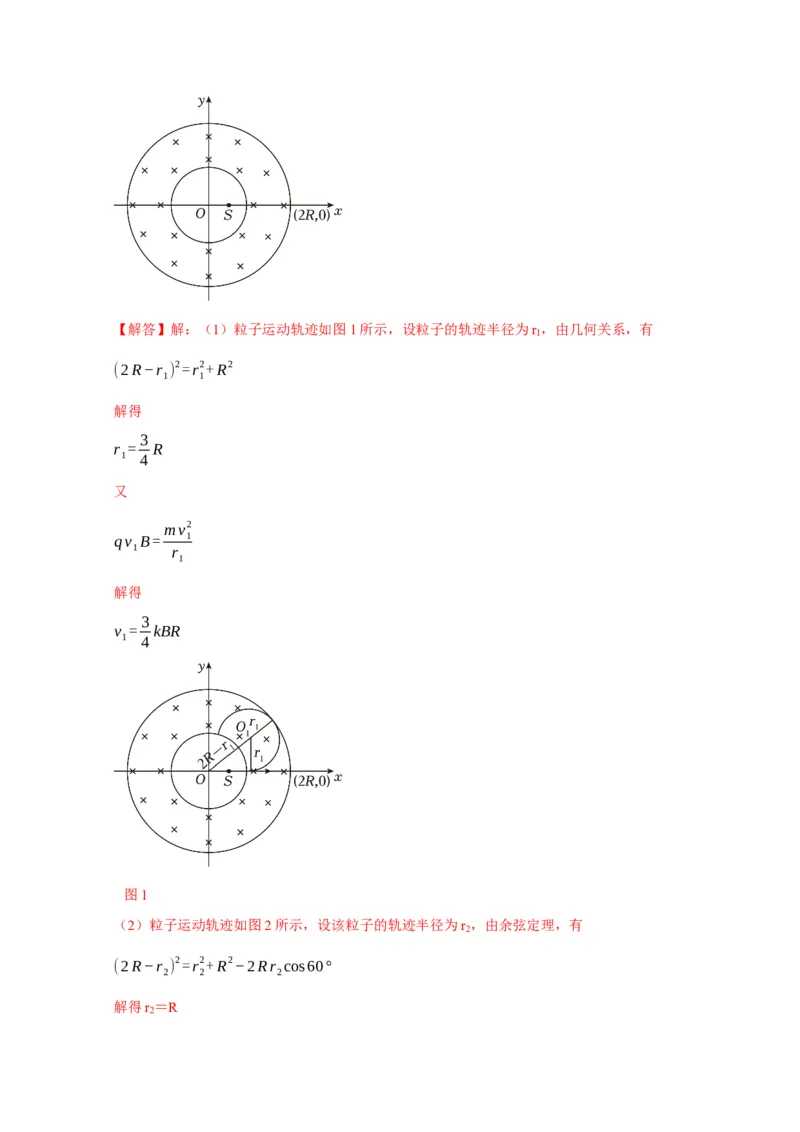
(2)粒子运动轨迹如图2所示,设该粒子的轨迹半径为r ,由余弦定理,有
2
(2R−r ) 2=r2+R2−2Rr cos60°
2 2 2
解得r =R
2又
mv2
qv B= 2
2 r
2
解得v =kBR
2
粒子运动的轨迹如图所示,回到粒子源位置的时间为
4πm √3R
t=3( + )
3qB v
2
解得
4π+3√3
t=
kB
图2
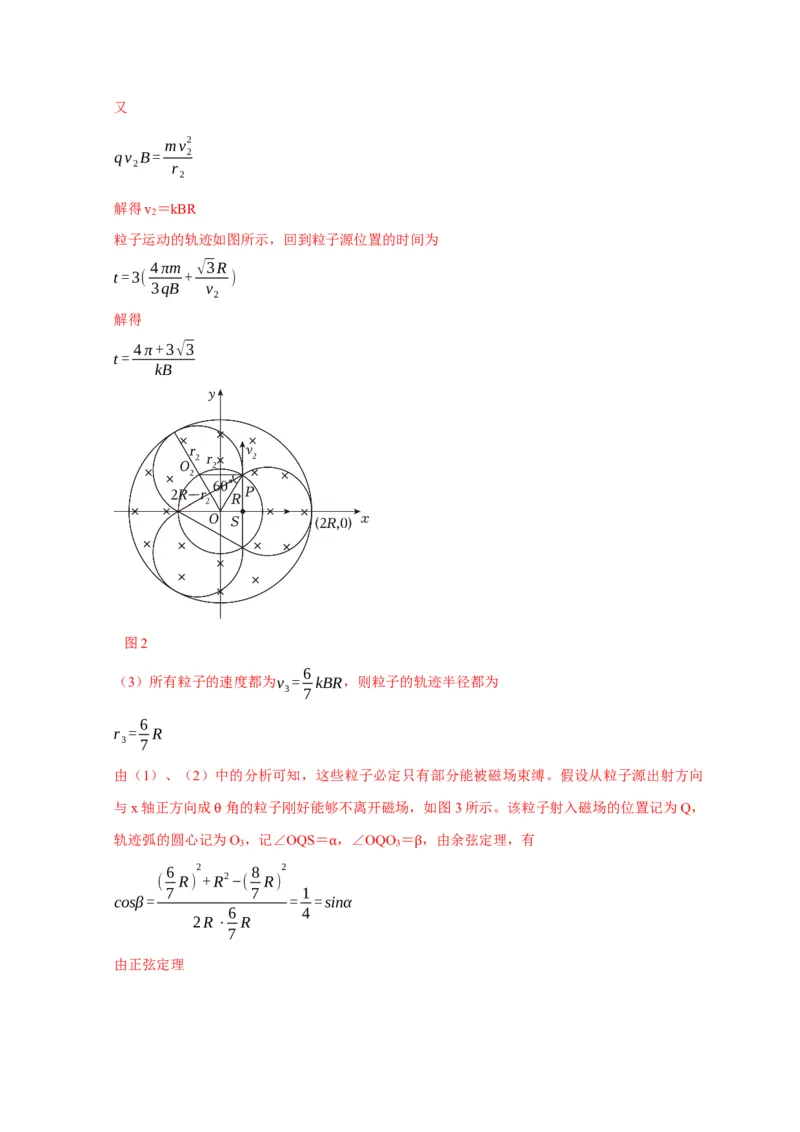
6
(3)所有粒子的速度都为v = kBR,则粒子的轨迹半径都为
3 7
6
r = R
3 7
由(1)、(2)中的分析可知,这些粒子必定只有部分能被磁场束缚。假设从粒子源出射方向
与x轴正方向成 角的粒子刚好能够不离开磁场,如图3所示。该粒子射入磁场的位置记为Q,
轨迹弧的圆心记为θ O ,记∠OQS= ,∠OQO = ,由余弦定理,有
3 3
6 2 8 2 α β
( R) +R2−( R)
7 7 1
cosβ= = =sinα
6 4
2R⋅ R
7
由正弦定理R
2 R
=
sinα sin(π−θ)
得
1
sinθ=2sinα=
2
故 =30°或 =150°
由此θ可知,当θ带电粒子的发射方向角 介于30°~150°之间时,粒子无法离开磁场,占比
150°−30° 1 θ
η= = ≈33.3%
360° 3
图3
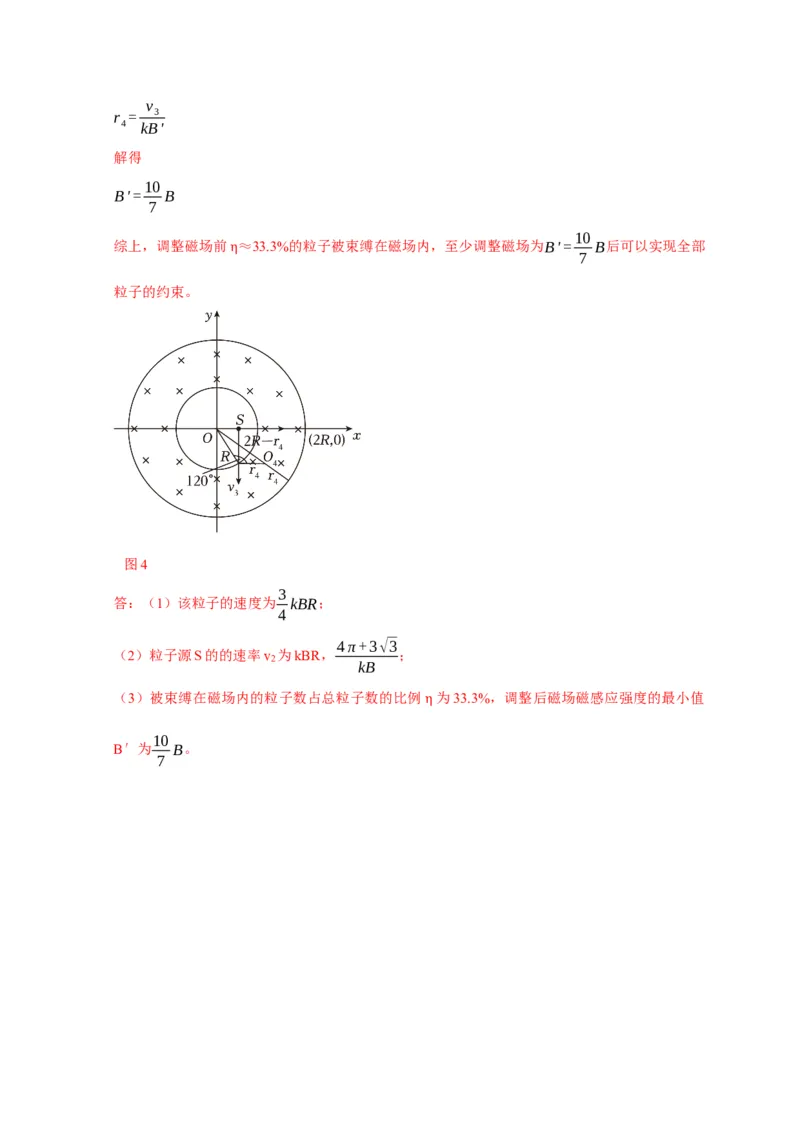
进一步分析,调整磁场的磁感应强度为B′以实现上述粒子的全部约束,则只需保证最易离开的
粒子无法离开即可。朝y轴负方向向下发射的粒子最易离开磁场,不妨假设该粒子刚好不离开磁
场,轨迹半径为r ,如图4所示,由几何关系,有
1
(2R−r ) 2=r2+R2−2Rr cos120°
4 4 4
解得
3
r = R
4 5
而
mv2
qv B'= 3
3 r
4
故v
r = 3
4 kB'
解得
10
B'= B
7
10
综上,调整磁场前 ≈33.3%的粒子被束缚在磁场内,至少调整磁场为B'= B后可以实现全部
7
η
粒子的约束。
图4
3
答:(1)该粒子的速度为 kBR;
4
4π+3√3
(2)粒子源S的的速率v 为kBR, ;
2
kB
(3)被束缚在磁场内的粒子数占总粒子数的比例 为33.3%,调整后磁场磁感应强度的最小值
η
10
B′为 B。
7
