OpenClaw:通过Nanobot源码,吃透AI Agent核心架构(Tools模块深度拆解)
刷到就是缘分!
点点关注不迷路(PS:点蓝色小字关注我),从此精彩不耽误!收藏起来慢慢看,下次找我更方便!后续还有更多内容哦~
如果说OpenClaw是2026年AI圈最火的开源项目,没人会反驳——从ClawdBot到Moltbot,再到如今登顶GitHub星标榜首的OpenClaw,它用“本地私有化部署+无限扩展能力”,重新定义了个人AI Agent的边界。但对于大多数开发者而言,OpenClaw核心代码量超43万行,直接啃源码如同“啃硬骨头”,门槛极高。
而香港大学开源的Nanobot,恰好给我们提供了一个“轻量化学习入口”——作为OpenClaw的精简实现,Nanobot仅用4000行核心代码,还原了OpenClaw的核心架构逻辑,尤其是Tools模块(工具系统),几乎完整复刻了OpenClaw工具调用的核心设计,却去掉了冗余的复杂封装,成为我们理解OpenClaw架构的“最佳敲门砖”。
今天,我们就从Nanobot的源码出发,手把手拆解Tools模块的实现细节、设计思想,结合全网OpenClaw相关知识,搞懂AI Agent“能做事、会做事”的核心逻辑——无论你是AI新手、架构学习者,还是想基于OpenClaw二次开发的开发者,这篇文章都能帮你打通“源码→架构→实战”的任督二脉。
前言:为什么要通过Nanobot学习OpenClaw的Tools模块?
在拆解源码前,我们先搞懂一个核心问题:OpenClaw的Tools模块到底是什么?为什么它是AI Agent的“核心能力底座”?
OpenClaw的本质是“具备自主执行能力的开源AI智能体”,它能帮你自动处理文件、执行Shell命令、网页搜索、甚至调用第三方服务,而这些所有“实际操作能力”,都来自于Tools模块——它就像OpenClaw的“手脚”,连接着AI的“大脑”(LLM模型)与现实世界,让AI的推理不再停留在文字层面,真正具备“落地执行”的能力。
但OpenClaw的Tools模块经过多轮迭代,已经变得异常复杂:支持20+种内置工具、兼容多平台适配、集成安全校验与权限控制,源码分散在多个目录,新手很难快速抓住核心。而Nanobot作为OpenClaw的“精简版”,核心目标就是“轻量化、易学习”,它的Tools模块保留了OpenClaw的核心设计,却去掉了冗余的兼容代码和高级特性,仅用几百行代码就实现了“工具定义→注册→调用”的完整流程,堪称“极简版OpenClaw工具系统”。
更关键的是,Nanobot与OpenClaw的Tools模块遵循完全一致的设计理念——模块化、可扩展、插件化,学会了Nanobot的Tools模块,再去看OpenClaw的源码,就能快速对应核心逻辑,事半功倍。
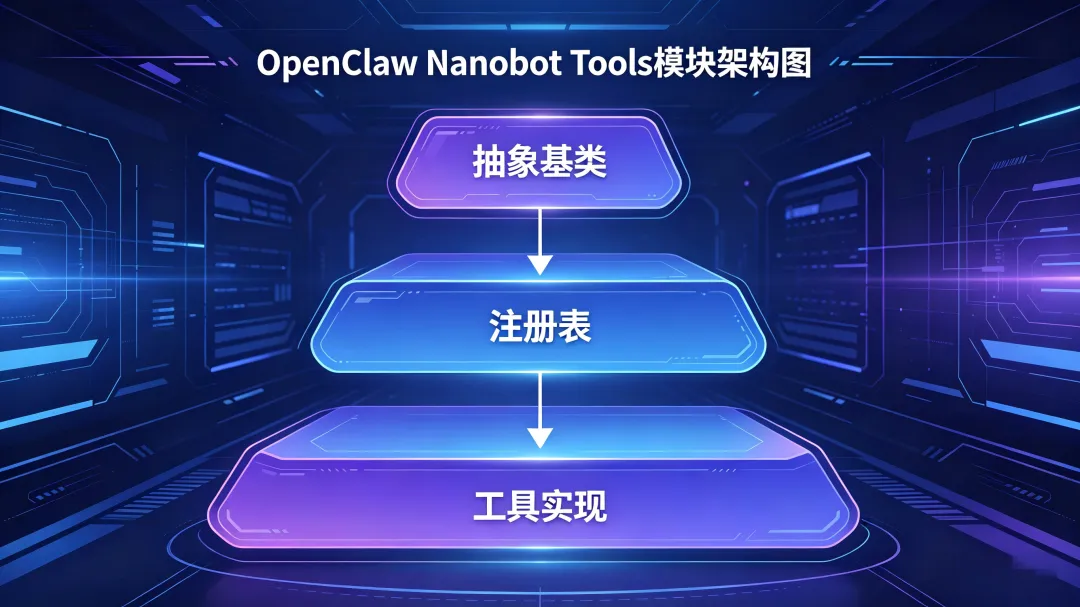
先放一张核心结论图,帮大家建立整体认知:Nanobot的Tools模块 = 抽象基类(定义标准)+ 工具实现(具体能力)+ 注册表(统一管理),这正是OpenClaw Tools模块的“简化版架构”,也是我们本次学习的核心框架。
第一步:环境准备+源码定位,找到Tools模块的核心文件
工欲善其事,必先利其器。在拆解源码前,我们先做好环境准备,找到Tools模块的核心文件,避免盲目查找。
1. 环境准备(极简版)
Nanobot的部署和源码阅读门槛极低,无需复杂依赖,几步就能搞定:
•克隆源码:git clone https://github.com/HKUDS/nanobot(香港大学官方仓库,稳定可访问);
•依赖安装:核心依赖仅Python 3.10+,执行pip install -r requirements.txt即可(无多余依赖,轻量化优势凸显);
•目录结构梳理:重点关注nanobot/agent/tools/目录——这就是我们本次要拆解的Tools模块核心目录,其他目录(如bus/、channel/)可暂时忽略,专注Tools模块即可。
2. Tools模块核心文件定位(关键!)
打开nanobot/agent/tools/目录,我们会发现3个核心文件,这3个文件构成了Tools模块的完整骨架,也是OpenClaw Tools模块的“精简复刻”,对应关系如下:
|
Nanobot核心文件
|
核心作用
|
对应OpenClaw文件
|
|
base.py
|
定义工具抽象基类,统一工具标准
|
claw/core/tools/base.py
|
|
registry.py
|
工具注册表,管理所有工具的注册与调用
|
claw/core/tools/registry.py
|
|
各类工具实现文件(如filesystem.py、shell.py)
|
具体工具的实现逻辑(文件操作、Shell执行等)
|
claw/core/tools/下各类工具文件
|
记住这3个文件的作用,我们接下来的拆解就围绕它们展开——从“标准定义”到“管理机制”,再到“具体实现”,一步步吃透Tools模块的架构逻辑。
第二步:深度拆解1:base.py——工具的“标准模板”,OpenClaw可扩展的核心
base.py是Tools模块的“灵魂文件”,它定义了所有工具必须遵循的“标准接口”——这也是OpenClaw Tools模块可扩展的核心设计:无论你是开发新工具,还是集成第三方工具,只要遵循这个接口,就能无缝接入系统,无需修改核心代码。
我们直接看Nanobot源码中的核心代码(精简后,保留关键逻辑),结合OpenClaw的设计理念,逐行解析:
核心代码解析(关键部分高亮)
pythonfrom abc import ABC, abstractmethodfrom typing import Dict, Anyclass Tool(ABC):"""工具抽象基类,所有工具必须继承此类并实现抽象方法"""@property@abstractmethoddef name(self) -> str:"""工具名称:唯一标识,用于LLM调用时指定工具"""pass@property@abstractmethoddef description(self) -> str:"""工具描述:用于LLM理解工具的功能,生成调用指令"""pass@property@abstractmethoddef parameters(self) -> Dict[str, Any]:"""工具参数:JSON Schema格式,定义工具需要的输入参数"""pass@abstractmethodasync def execute(self, **kwargs) -> str:"""工具执行逻辑:核心方法,接收参数并执行具体操作,返回结果"""pass
关键设计解析(结合OpenClaw)
这一段简单的抽象基类代码,看似简单,却蕴含了OpenClaw Tools模块的3个核心设计思想,也是我们学习架构的重点:
1. 抽象封装:统一接口,降低耦合
Nanobot通过ABC(抽象基类)定义了Tool类,所有工具(如文件操作工具、Shell工具)都必须继承此类,并实现4个抽象方法——这就是“接口标准化”。
对应到OpenClaw中,这个设计被进一步强化:OpenClaw的Tool基类不仅定义了这4个方法,还增加了权限校验、日志记录、异常处理等通用逻辑,所有工具都能复用这些逻辑,避免重复开发。而Nanobot保留了最核心的接口定义,去掉了冗余的通用逻辑,更便于我们理解“接口设计”的本质。
举个例子:无论是Nanobot中的ReadFileTool(读取文件),还是OpenClaw中的WebSearchTool(网页搜索),它们都必须实现name、description等方法——LLM在调用工具时,只需要通过name找到工具,通过description理解工具功能,通过parameters获取输入参数,再调用execute方法执行,完全不用关心工具的具体实现,这就是“解耦”的核心。
2. 面向LLM设计:让AI“看懂”工具
很多人疑惑:为什么Tool类需要name、description、parameters这3个属性?核心原因是——让LLM(大语言模型)能“看懂”工具,知道该如何调用。
在OpenClaw和Nanobot中,LLM的核心工作之一是“判断是否需要调用工具”以及“如何调用工具”。而LLM本身并不知道工具的存在,只能通过我们提供的描述信息来理解:
•name:工具的唯一标识,LLM调用时需要指定“调用哪个工具”(比如调用“read_file”工具读取文件);
•description:工具的功能描述,比如“读取指定路径的文件内容,支持绝对路径和相对路径”,LLM通过这个描述判断“这个工具是否能解决当前问题”;
•parameters:工具的输入参数(JSON Schema格式),比如read_file工具需要“file_path”(文件路径)参数,LLM通过这个信息生成正确的调用参数,避免调用失败。
这一点是OpenClaw Tools模块的核心设计之一——工具不仅要“能执行”,还要“能被AI理解”,而Nanobot完美复刻了这个逻辑,让我们能清晰看到“AI与工具交互”的底层逻辑。
3. 异步设计:适配高并发场景
注意到execute方法被定义为async(异步方法)吗?这不是偶然,而是OpenClaw和Nanobot共同的设计选择。
AI Agent在执行工具时,经常会遇到耗时操作——比如网页搜索、大文件读取、Shell命令执行,这些操作如果用同步方法,会阻塞整个Agent的运行,导致响应变慢。而异步方法(async/await)可以让Agent在执行工具的同时,处理其他任务(比如接收新的用户指令),提升并发能力。
对应到OpenClaw中,异步设计被广泛应用于工具调用、消息处理等核心流程,而Nanobot作为轻量化框架,保留了这个核心设计,也让我们意识到:AI Agent的架构设计,必须考虑“高并发”和“非阻塞”,这是生产级AI Agent的必备特性。
第三步:深度拆解2:registry.py——工具的“管理中心”,OpenClaw插件化的关键
有了工具的“标准模板”(base.py),接下来就需要一个“管理中心”,来统一管理所有工具——这就是registry.py的作用。它负责工具的“注册”和“调用”,相当于Tools模块的“通讯录”,让Agent能快速找到并调用所需的工具。
同样,我们先看Nanobot的核心源码(精简后),再结合OpenClaw的设计,解析其核心逻辑:
核心代码解析
pythonfrom typing import Dict, Typefrom .base import Toolclass ToolRegistry:"""工具注册表,单例模式,管理所有工具的注册与调用"""_instance = Nonedef __new__(cls, *args, **kwargs):单例模式:确保整个系统只有一个ToolRegistry实例if cls._instance is None:cls._instance = super().new(cls)cls._instance.tools: Dict[str, Tool] = {} # 存储工具:key=工具name,value=工具实例return cls._instancedef register_tool(self, tool: Tool) -> None:"""注册工具:将工具实例添加到注册表中"""if tool.name in self.tools:raise ValueError(f"工具 {tool.name} 已注册,不可重复注册")self.tools[tool.name] = tooldef get_tool(self, tool_name: str) -> Tool:"""获取工具:根据工具name,从注册表中获取工具实例"""if tool_name not in self.tools:raise ValueError(f"工具 {tool_name} 未注册")return self.tools[tool_name]async def execute_tool(self, tool_name: str, kwargs) -> str:"""执行工具:根据工具name获取工具,调用execute方法执行"""tool = self.get_tool(tool_name)return await tool.execute( kwargs)
|
关键设计解析(结合OpenClaw)
Nanobot的ToolRegistry采用“单例模式+字典存储”,逻辑简洁,但却完美复刻了OpenClaw工具注册机制的核心——插件化管理,这也是OpenClaw能支持“无限扩展工具”的关键。
1. 单例模式:全局唯一的工具管理中心
ToolRegistry采用单例模式,确保整个系统中只有一个工具注册表实例——这意味着,无论在Agent的哪个模块,只要需要调用工具,都可以通过同一个注册表获取工具,避免出现工具重复注册、调用混乱的问题。
在OpenClaw中,这个设计被进一步优化:OpenClaw的ToolRegistry不仅是单例,还支持“动态注册”和“动态卸载”工具——比如在Agent运行过程中,你可以随时添加新的工具,无需重启Agent,这对于生产级应用来说至关重要。而Nanobot保留了单例的核心逻辑,简化了动态卸载等高级功能,更便于我们理解“工具管理”的本质。
2. 字典存储:高效的工具查找
ToolRegistry用字典(tools)存储工具,key是工具的name(唯一标识),value是工具实例——这种设计的优势是“O(1)时间复杂度查找”,Agent在调用工具时,只需要知道工具的name,就能快速找到对应的工具实例,效率极高。
对应到OpenClaw中,工具注册表不仅存储工具实例,还存储工具的元信息(比如工具的版本、作者、权限等级),并支持按工具类型、权限等级进行筛选,满足更复杂的工具管理需求。而Nanobot的字典存储,是最基础、最核心的实现方式,也是我们学习架构时需要掌握的“高效查找”设计思路。
3. 统一调用入口:解耦工具调用与实现
ToolRegistry提供了execute_tool方法,作为所有工具的“统一调用入口”——Agent调用工具时,不需要直接操作工具实例,只需要调用这个方法,传入工具name和参数,就能完成工具执行。
这个设计的核心是“解耦”:Agent不需要知道工具的具体实现(比如read_file工具是如何读取文件的),只需要知道工具的name和参数,就能通过注册表调用工具。这种解耦设计,让Agent的核心逻辑(如LLM推理、消息处理)与工具实现完全分离,便于后续扩展和维护。
举个例子:如果我们想把Nanobot中的read_file工具替换成一个更高效的文件读取工具,只需要实现新的工具类(继承Tool基类),注册到ToolRegistry中,Agent的调用逻辑完全不需要修改——这就是插件化设计的魅力,也是OpenClaw能快速扩展工具的核心原因。
 点点关注不迷路,一起互动有温度!
点点关注不迷路,一起互动有温度!
 评论区里唠唠嗑,再来点赞+关注,您的好运挡不住!
评论区里唠唠嗑,再来点赞+关注,您的好运挡不住!
第四步:深度拆解3:具体工具实现——从源码看OpenClaw工具的核心逻辑
有了“标准模板”(base.py)和“管理中心”(registry.py),接下来就是具体的工具实现——Nanobot内置了6种常用工具,覆盖了文件操作、Shell执行、网页搜索等核心场景,这些工具的实现逻辑,与OpenClaw对应的工具高度一致,是我们理解“工具如何落地”的关键。
我们以2个最具代表性的工具为例,拆解其实现逻辑,结合OpenClaw的相关设计,搞懂“工具从定义到执行”的完整流程。
案例1:文件操作工具(filesystem.py)——最基础也最核心的工具
文件操作是AI Agent最常用的能力之一(比如读取配置文件、写入日志、编辑文档),Nanobot的filesystem.py中实现了4个文件操作工具:ReadFileTool(读取文件)、WriteFileTool(写入文件)、EditFileTool(编辑文件)、ListDirTool(列出目录内容)。
我们以ReadFileTool为例,看其具体实现(精简后):
pythonfrom .base import Toolfrom typing import Dict, Anyimport osclass ReadFileTool(Tool):@propertydef name(self) -> str:return "read_file" 工具唯一标识,与OpenClaw保持一致@propertydef description(self) -> str:return "读取指定路径的文件内容,支持绝对路径和相对路径;如果文件不存在,返回错误信息。" # 让LLM理解工具功能@propertydef parameters(self) -> Dict[str, Any]:# JSON Schema格式,定义输入参数,让LLM知道需要传入什么参数return {"type": "object","properties": {"file_path": {"type": "string","description": "文件路径,支持绝对路径和相对路径"}},"required": ["file_path"] # 必须传入的参数}async def execute(self, **kwargs) -> str:# 核心执行逻辑:读取文件内容file_path = kwargs.get("file_path")if not os.path.exists(file_path):return f"错误:文件 {file_path} 不存在"try:with open(file_path, "r", encoding="utf-8") as f:content = f.read()return f"文件 {file_path} 内容如下:\n{content}"except Exception as e:return f"读取文件失败:{str(e)}"
|
关键解析(结合OpenClaw)
1. 严格遵循抽象基类:ReadFileTool继承了Tool类,实现了所有抽象方法,完全符合“接口标准化”的设计,这也是它能被ToolRegistry注册和调用的前提。
2. 面向LLM优化:description和parameters的描述非常详细,LLM能清晰理解工具的功能和所需参数,避免调用错误——这一点在OpenClaw中被进一步强化,OpenClaw的工具描述会更细致,甚至会包含示例调用方式,帮助LLM更准确地生成调用指令。
3. 异常处理:execute方法中加入了异常捕获(文件不存在、读取失败等),并返回清晰的错误信息——这是生产级工具的必备特性,OpenClaw的工具也会包含更完善的异常处理、日志记录,确保工具调用的稳定性。
案例2:Shell工具(shell.py)——AI Agent的“超级权限”工具
Shell工具是OpenClaw最具争议也最强大的工具之一——它能让AI Agent直接执行Shell命令,实现“操控电脑”的能力(比如安装软件、运行脚本、查看系统状态)。Nanobot的shell.py中实现了ExecTool,精简了OpenClaw Shell工具的复杂逻辑,保留了核心功能。
pythonfrom .base import Toolfrom typing import Dict, Anyimport asyncioclass ExecTool(Tool):@propertydef name(self) -> str:return "exec"@propertydef description(self) -> str:return "执行Shell命令,返回命令执行结果;支持超时控制(默认30秒),避免命令阻塞。"@propertydef parameters(self) -> Dict[str, Any]:return {"type": "object","properties": {"command": {"type": "string","description": "要执行的Shell命令(如ls、pwd)"},"timeout": {"type": "integer","description": "超时时间(秒),默认30秒","default": 30}},"required": ["command"]}async def execute(self, **kwargs) -> str:command = kwargs.get("command")timeout = kwargs.get("timeout", 30)try:异步执行Shell命令,避免阻塞process = await asyncio.create_subprocess_shell(command,stdout=asyncio.subprocess.PIPE,stderr=asyncio.subprocess.PIPE)# 超时控制stdout, stderr = await asyncio.wait_for(process.communicate(), timeout=timeout)if process.returncode == 0:return f"命令执行成功:\n{stdout.decode('utf-8')}"else:return f"命令执行失败:\n{stderr.decode('utf-8')}"except asyncio.TimeoutError:return f"命令执行超时(超过{timeout}秒)"except Exception as e:return f"命令执行异常:{str(e)}"
|
关键解析(结合OpenClaw)
1. 异步执行Shell命令:使用asyncio.create_subprocess_shell异步执行命令,避免阻塞Agent的运行——这与OpenClaw的设计完全一致,OpenClaw的Shell工具也采用异步方式,支持高并发场景。
2. 超时控制:加入超时机制,避免恶意命令(如无限循环)导致Agent卡死——这是OpenClaw安全设计的核心之一,OpenClaw的Shell工具还会加入权限校验(比如限制某些危险命令的执行),而Nanobot作为轻量化框架,保留了超时控制这个最基础的安全特性。
3. 结果反馈:清晰返回命令执行结果(stdout)和错误信息(stderr),让LLM能根据结果判断下一步操作——这也是AI Agent“自主决策”的基础:LLM调用Shell工具后,根据返回结果,决定是否继续执行其他命令,或向用户反馈结果。
这里补充一个全网热点:2026年2月,OpenClaw曾因Shell工具权限过高,出现“AI锁死服务器”的安全事件,这也让OpenClaw团队加强了工具的权限控制——这也提醒我们:工具的强大伴随着风险,在设计工具时,必须加入安全校验和权限限制,这也是OpenClaw Tools模块后续迭代的核心方向。
第五步:从Nanobot到OpenClaw,Tools模块的架构升级与实战启示
通过拆解Nanobot的Tools模块,我们已经掌握了OpenClaw Tools模块的核心逻辑——抽象基类定义标准、注册表管理工具、具体工具实现功能。但Nanobot毕竟是精简版,OpenClaw的Tools模块在其基础上,进行了大量的架构升级,这些升级点,正是我们实战中需要重点关注的。
1. OpenClaw Tools模块的架构升级(核心差异)
对比Nanobot和OpenClaw的Tools模块,我们能清晰看到OpenClaw的升级方向,这些升级让OpenClaw从“轻量化框架”变成“生产级AI Agent”:
•更完善的通用逻辑:OpenClaw的Tool基类增加了日志记录、权限校验、异常统一处理、参数校验等通用逻辑,所有工具都能复用,避免重复开发;
•更强大的注册表功能:OpenClaw的ToolRegistry支持动态注册/卸载工具、工具分类管理、工具版本控制、权限分级管理,适配复杂的生产场景;
•更多样的工具类型:OpenClaw内置了20+种工具,覆盖网页搜索、邮件发送、数据库操作、第三方API调用等场景,还支持自定义工具和第三方工具集成(如百度电商Skill、网易云音乐API);
•更严格的安全设计:加入命令白名单、权限分级、操作日志审计等安全特性,解决Shell工具等高危工具的安全风险;
•更灵活的配置驱动:所有工具的参数的都支持通过JSON配置文件管理,无需修改源码,就能调整工具的行为(如Shell工具的超时时间、文件工具的权限范围)。
2. 实战启示:如何基于OpenClaw Tools模块二次开发?
学习源码的最终目的是实战,结合Nanobot的学习经验和OpenClaw的架构设计,我们可以总结出3个核心实战技巧,帮你快速上手OpenClaw Tools模块的二次开发:
技巧1:遵循接口标准,快速开发自定义工具
无论你是开发新工具,还是集成第三方工具,都要遵循OpenClaw的Tool基类接口——实现name、description、parameters、execute四个核心方法,就能快速将工具注册到OpenClaw中。
比如,你想开发一个“微信消息发送工具”,只需要:① 继承Tool基类;② 实现四个方法(name设为“wechat_send”,description描述功能,parameters定义接收的参数,execute实现发送逻辑);③ 通过ToolRegistry注册工具,就能让OpenClaw调用这个工具,实现“AI自动发送微信消息”的功能。
技巧2:利用注册表,实现工具的动态扩展
OpenClaw的ToolRegistry支持动态注册工具,这意味着你可以在Agent运行过程中,随时添加新的工具,无需重启Agent——这对于实战场景非常重要(比如根据业务需求,动态添加新的工具)。
具体操作:创建工具实例后,调用ToolRegistry的register_tool方法,传入工具实例,即可完成注册;调用get_tool方法,就能获取工具并调用。
技巧3:重视安全设计,规避工具调用风险
尤其是高危工具(如Shell工具、文件操作工具),必须加入安全校验:① 限制工具的权限范围(如Shell工具只允许执行指定的安全命令);② 加入超时控制,避免命令阻塞;③ 记录工具操作日志,便于审计和排查问题。
参考OpenClaw的安全设计,你可以在自定义工具的execute方法中,加入权限校验逻辑,确保工具调用的安全性——这是生产级AI Agent的必备要求。
第六步:总结:Tools模块的核心价值,及OpenClaw架构学习路径
通过Nanobot源码拆解OpenClaw的Tools模块,我们最终可以得出一个核心结论:Tools模块是OpenClaw的“能力底座”,它的设计逻辑——接口标准化、管理插件化、实现可扩展,不仅是OpenClaw的核心架构思想,也是所有AI Agent工具系统的通用设计范式。
对于开发者而言,Nanobot的Tools模块是我们学习OpenClaw架构的“捷径”——通过它,我们可以快速掌握核心逻辑,再去啃OpenClaw的源码,就能事半功倍;对于AI Agent爱好者而言,理解Tools模块的设计,能帮我们更清晰地认识到“AI Agent为什么能做事”,从而更好地使用OpenClaw搭建自己的个人AI助手。
最后,给大家推荐一条OpenClaw架构的学习路径(结合Nanobot):
1.先学习Nanobot的Tools模块(本文重点),掌握“抽象基类→注册表→工具实现”的核心逻辑;
2.再学习Nanobot的Agent Loop(核心循环)和Message Bus(消息总线),理解工具调用的完整流程;
3.最后深入OpenClaw的源码,重点看Tools模块的升级部分(安全设计、通用逻辑、工具扩展),结合实战场景,开发自定义工具。
OpenClaw的开源生态还在快速发展,腾讯云、阿里云、百度智能云等都已接入OpenClaw,工具系统也在不断丰富——掌握Tools模块的架构逻辑,不仅能帮你快速上手OpenClaw,更能让你掌握AI Agent的核心设计思想,在AI时代抢占先机。
后续我会继续拆解Nanobot的Agent Loop和Message Bus,结合OpenClaw的核心源码,带你吃透整个AI Agent的架构设计。如果大家在学习过程中有疑问,或者想了解某个具体工具的实现细节,欢迎在评论区留言交流~
请点击下面的卡片关注我or回到文章顶部,点击蓝色小字“#微龙v鸣轩”关注我,谢谢!
 夜雨聆风
夜雨聆风