 夜雨聆风
夜雨聆风





OpenClaw + Robot 项目专栏|OpenClaw 正在“长出身体”:这周最值得看的 3 个项目,透露了什么信号?
点击下方卡片,关注【Xbotics具身智能实验室】公众号
更多具身干货,欢迎加入【Xbotics知识星球】(戳我)
👉具身智能学习资料汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-Guide
👉具身智能求职/实习信息汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-AI-Job
你想要的这里都有~~
如果你最近一直在看 OpenClaw 和机器人的结合,大概率已经感受到一个变化:讨论重点正在从“又接上了一台机器人”转向“这套东西到底会长成什么样的系统”。
过去一段时间,OpenClaw 在很多人眼里更像是一个数字世界里的 Agent runtime:会调工具、会走流程、会接消息、会长期在线。但这周更值得看的,不是又多了几个花哨 Demo,而是这条线开始出现更清晰的分工:有人在把 OpenClaw 推向具身 runtime,有人在把它推向真实服务机器人场景,还有人在把它推向DIY 实体机器人。
换句话说,OpenClaw 不只是“会做事”了,它开始真的“长出身体”了。下面这 3 个项目,是本周最值得讲的代表。
1)ABot-Claw:不是再接一台机器人,而是在把 OpenClaw 往具身 runtime
项目地址:论文:ABot-Claw: A Foundation for Persistent, Cooperative, and Self-Evolving Robotic AgentsGitHub:amap-cvlab/ABot-Claw
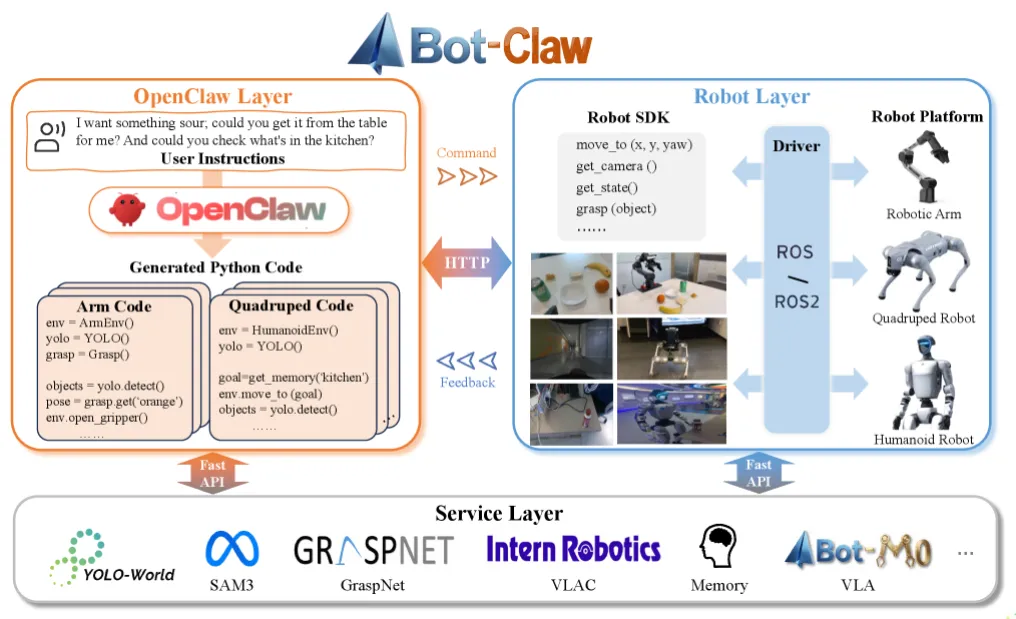
这周最值得重点讲的,还是 ABot-Claw。它的论文写得非常直接:这不是一个从零重做的具身智能框架,而是在 OpenClaw runtime 之上做具身扩展,目标是把原本偏高层的软件操作与任务编排能力,推进到真实世界里的长期、多机器人执行。
这个项目真正有价值的地方,不在“又支持了多少机器人”,而在它开始系统性回答一个长期存在的问题:
高层 Agent 的“意图”,怎么稳定地落到真实机器人的“执行”上。
从公开内容来看,ABot-Claw 的核心补丁有三块:
第一块是统一具身接口。它不是把每台机器人都当成一个完全独立的系统,而是试图抽出统一能力层,让 OpenClaw 可以面向不同本体去调度。
第二块是视觉中心的跨本体多模态记忆。也就是说,它不只是做一步一反馈,而是开始把空间、视觉、语义等信息沉淀到共享记忆里,让系统具备跨任务复用经验的可能。
第三块是critic 驱动的闭环反馈。这一点很重要,它意味着系统不是单纯“规划一次然后执行到底”,而是会在执行过程中评估状态、发现偏差、必要时做局部修正和重规划。
所以,如果你现在关注的是“OpenClaw 最终会不会变成机器人时代的一层通用执行底座”,那 ABot-Claw 是这周最值得跟的一条。它代表的不是“把 OpenClaw 接到某个本体上”,而是把 OpenClaw 从上层编排,推进成一个能管理异构机器人、能积累长期经验、能闭环修正执行的 embodied runtime。
2)feishu-classmate:不是做通用机器人,而是先把实验室服务场景做透
项目地址:GitHub:BaiTianHaoNian/feishu-classmate
如果说 ABot-Claw 更像基础设施路线,那 feishu-classmate 代表的就是另一条很现实的路径:
先别急着做“大一统机器人平台”,先把一个真实场景做透。
这个项目给自己的定义非常明确:它是一个面向机器人实验室的 AI 实验伙伴,核心组合是:
OpenClaw(大脑)+ Temi(身体)+ 飞书(记忆)+ MetaClaw(技能注入)
它不是单纯做机器人控制,而是把实验室日常高频事务接进来:带访客参观、项目进度管理、实验记录、训练跟踪、论文与投稿进度、器材借还巡查、团队协作提醒等。
这类项目最值得抄的,不是某个单点功能,而是它对“机器人到底该先做什么”这个问题的回答。很多团队一上来就想做“通用机器人助手”,最后往往陷进一堆复杂但不高频的能力里;而 feishu-classmate 反过来,它先抓住了实验室这个天然有流程、有协作、有访客、有知识沉淀需求的场景。
于是,机器人不再只是一个会动的终端,而是被放进了真实组织流里,开始承担导览、记录、提醒、协调这些持续发生的工作。
这条路线的意义在于,它让 OpenClaw 不再只是“会调机器人接口”,而是开始真正进入服务机器人场景。也就是说,机器人不只是一个执行器,而是变成了一个有对话入口、有任务上下文、有组织记忆的场景角色。
这个方向未必最炫,但很可能最容易形成可复用、可落地、可持续演进的产品原型。

3)real-tars:不是先做平台,而是让 OpenClaw 真正进入 DIY 实体机器人
项目地址:GitHub:zabbix-byte/real-tars
第三条值得讲的,是 real-tars。这条线的吸引力很直接:
它不是面向大厂平台,也不是面向复杂多机系统,而是在问一个更朴素的问题:
如果我手里只有比较有限的硬件预算,能不能先用 OpenClaw 做出一个真正“有身体”的机器人?
从仓库公开的信息看,real-tars 的定位很清楚:做一个受《星际穿越》里 TARS 启发的现实版机器人。项目里直接给了完整的阶段划分,包括 Brain、Senses、Muscles、Monolith 四个阶段;硬件侧用的是 XIAO ESP32-S3 Sense、VL53L0X 激光测距、OLED、舵机、I2S 音频 等相对可获得的器件,软件编排里则把 OpenClaw 放在 AI-Robot orchestration 的位置。
这类项目看起来没有“大平台”那么恢弘,但它的价值非常真实。因为它在把 OpenClaw 从“软件 Agent”进一步拉向低成本实体化。对于很多开发者、Maker、课程组织者和学生来说,这种路线比大型机器人平台更有启发意义:你不用先拥有一台昂贵的人形或四足,也能开始搭建自己的感知、语音、执行和交互闭环。
所以 real-tars 的意义,不是它已经做成了多么成熟的机器人,而是它证明了一件事:
OpenClaw 正在进入 DIY 机器人世界。
这意味着未来在课程、社区、黑客松、个人项目里,OpenClaw 很可能不只对应“消息里的 Agent”,还会越来越多地对应“桌面上的一个会听、会看、会动、会说话的实体”。
本周趋势补充:真正值得跟的,不只是真机项目,还有两类“基础层补丁”
如果把视野再放大一点,这周还有两条很值得补充的趋势。
EmbodiedClaw:更像开发工作流自动化
项目地址:论文:EmbodiedClaw
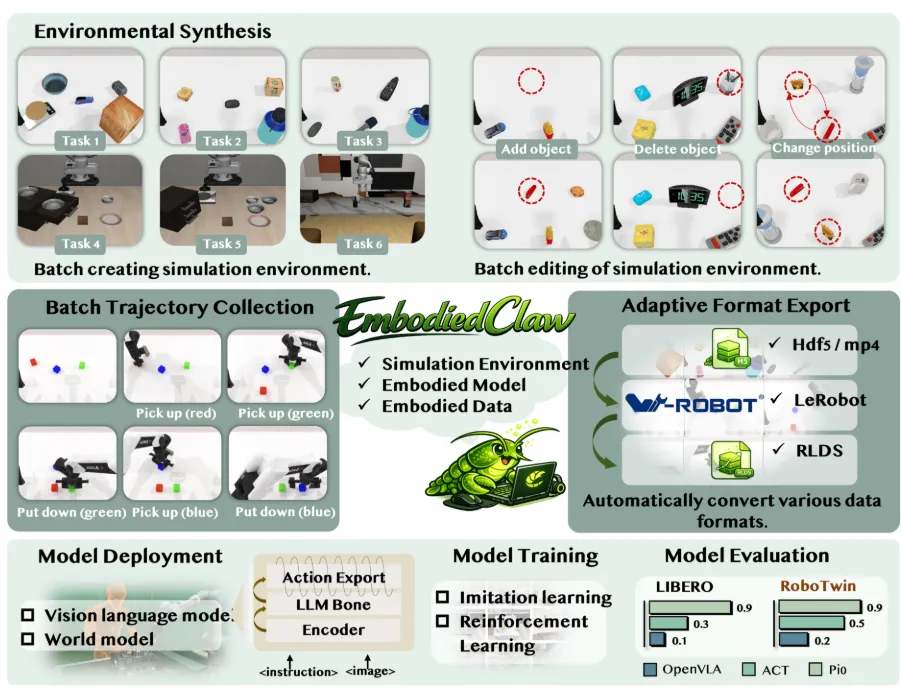
EmbodiedClaw 的切入点很特别,它不直接去控某一台机器人,而是把具身智能研发过程里那些高频、高成本的工程工作,变成可以通过对话触发的可执行流程。
论文里明确提到,它面向的是环境构建与修改、轨迹采集、模型训练与评测这类工作,把它们从手工工具链变成 conversational workflow。
这意味着 OpenClaw 风格的能力,正在往“机器人开发工具链”本身渗透。未来你要不要接机器人,可能都不再只是“写脚本 + 配环境 + 跑工具”,而是越来越像“给系统描述目标和约束,由它去组织开发流程”。
如果说 ABot-Claw 是在补真实执行闭环,那 EmbodiedClaw 更像是在补研发工作流自动化。
ChemBot:更像“VLA + memory + MCP”进入长程实机任务
项目地址:论文:Long-Term Memory for VLA-based Agents in Open-World Task Execution
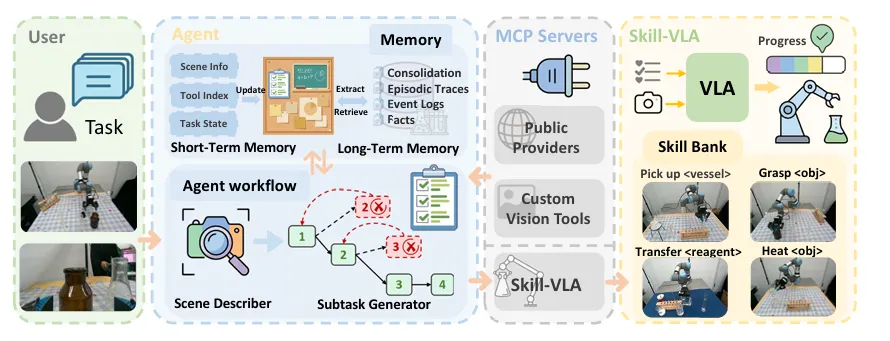
这篇工作虽然不是 OpenClaw 原生项目,但它很值得放到趋势补充里,因为它把VLA + 长时记忆 + MCP server 编排正式带进了长程实机任务。
从论文标题和公开描述来看,它关注的是 open-world task execution 里的长期记忆问题,把 autonomous AI agent 和 progress-aware VLA 结合起来,再通过 MCP server 组织工具和子模块,目标是解决复杂、长程、易中断、多阶段任务。
这条线的重要性在于,它说明大家已经不满足于“VLA 模型能不能出动作”,而开始认真补长期经验积累、记忆复用、异步推理和工具协调这些更偏系统层的问题。
对 OpenClaw × Robot 这条线来说,这其实是很强的邻近信号:未来机器人系统的竞争,很可能不只在模型本身,而在谁先把记忆层、协调层和执行层真正焊在一起。
观察位:openzess / robofang
openzessGitHub:[rosdebbu/openzess]https://github.com/rosdebbu/openzess
这条线更像一个偏 OpenClaw 操作 / 抓取底座 的项目,重点在 grip operations、系统工程和底层工具链。方向很值得看,但这周公开资料里对“新增了什么关键能力”的描述还不够完整,所以我暂时把它放在观察位。
robofangGitHub:[sandraschi/robofang]https://github.com/sandraschi/robofang
从公开仓库描述来看,robofang 更像一个实验性的 orchestration hub,重点放在 MCP fleet、multi-agent council、ROS 2 桥接和 robotics 这些能力上。它离“成熟产品”还有距离,但很适合拿来观察 OpenClaw 生态如何往机器人编排层扩张。
总结:这周真正值得看的,不是更多 Demo,而是 OpenClaw 开始出现了三种“身体”
把这几条线放在一起看,其实信号已经很明显了。
-
ABot-Claw 代表的是:OpenClaw 正在从上层编排走向具身 runtime。 -
feishu-classmate 代表的是:OpenClaw 正在进入真实服务机器人场景。 -
real-tars 代表的是:OpenClaw 正在进入 DIY 实体机器人。 -
而 EmbodiedClaw、ChemBot、openzess、robofang 这些补充方向,则说明这条线背后的开发工作流、记忆层、协调层,也在同步长出来。
所以,这周的核心判断不是“OpenClaw 又接上了几台机器人”,而是:
OpenClaw × Robot 这条线,已经开始从零散接入,走向分层成形。
接下来更值得看的,不是谁做了最炫的演示,而是谁能把这三件事真正串起来:
能组织任务、能接入场景、能落到实体、还能在系统层持续演进。
项目速查
ABot-Claw论文:https://arxiv.org/abs/2604.10096GitHub:https://github.com/amap-cvlab/ABot-Claw
feishu-classmateGitHub:https://github.com/BaiTianHaoNian/feishu-classmate
real-tarsGitHub:https://github.com/zabbix-byte/real-tars
EmbodiedClaw论文:https://arxiv.org/abs/2604.13800
ChemBot / Long-Term Memory for VLA-based Agents in Open-World Task Execution论文:https://arxiv.org/abs/2604.15671
openzessGitHub:https://github.com/rosdebbu/openzess
robofangGitHub:https://github.com/sandraschi/robofang
往期回顾
OpenClaw + Robot 项目专栏 | OpenClaw 正在“长出身体”:最近这 3 个项目,透露了什么信号?
OpenClaw + Robot 项目专栏|四个新增项目的实战导读
OpenClaw + Robot 项目专栏|把 OpenClaw 装进机器人身体:四个新增项目的实战导读
Xbotics-robot-openclaw-awesome-work:把“OpenClaw × Robot”方向上出现的项目、教程、活动和实践资料,整理成一个统一入口
-END-
Ask Me Anything|提问箱
❝
对文章有疑惑,或想聊更深?欢迎把你的问题丢给我们:技术方案、实操踩坑、课程与资料、项目合作、职业发展,都可以问。
怎么问:在评论区留言,或私信公众号
我们会做什么:每周集中整理高质量问题并公开回复,重点问题邀请作者或嘉宾深度解答;典型问题会加入知识库并持续更新。
提问小提示:尽量说明「你的目标—当前做法—期望产出」,附上必要信息(硬件/软件版本、数据规模等),能更快获得有用答案。
一起把问题变成知识,推动社区进步 🚀
