 夜雨聆风
夜雨聆风





OpenClaw + Robot 项目专栏|桥接层、操作系统层、应用层
点击下方卡片,关注【Xbotics具身智能实验室】公众号
更多具身干货,欢迎加入【Xbotics知识星球】(戳我)
👉具身智能学习资料汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-Guide
👉具身智能求职/实习信息汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-AI-Job
你想要的这里都有~~

以前大家聊 OpenClaw 和 MCP,兴奋点总落在同一句话上:“大模型终于能控机器人了。” 至于怎么稳定地接、怎么管理进程、怎么做成人能用的应用,大部分项目还顾不上。现在,这三个项目刚好把这三层补上了:桥接层、操作系统层、应用层。
一、ros-mcp:在急着做大脑之前,先把接口做扎实
第一个项目 jonasneves/ros-mcp,仓库首页一句话就能看懂:Connect AI agents to ROS robots。
它不做技能,不做花哨的交互。它只做一件事:把 ROS 世界里最核心的东西——topics、services、nodes、parameters、actions——全部暴露成 MCP tools,让 Claude Desktop、Claude Code、Cursor 这些上层 agent 直接调用。仓库已经覆盖了 30+ tools,而且把使用模式拆得很细:浏览器 dashboard、本地 stdio、HTTP server、远程 CI server,全部支持。
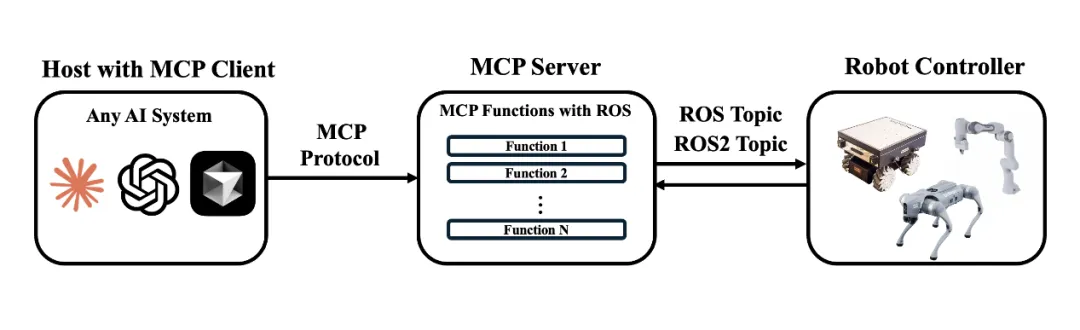
这个项目为什么值得写?因为绝大多数“机器人 + 大模型”项目,最先卡住的根本不是模型能力,而是接口层。agent 想接机器人,它得知道当前有哪些 topic、哪些 service 能调、参数是什么、动作怎么停、状态怎么看、是不是接对了 rosbridge。这些东西以前散落在调试脚本和私有 glue code 里,乱成一团。ros-mcp 做的事情,就是把这些东西往一个通用 harness 里收。
一句话总结:它不是在做机器人大脑,而是在做机器人世界的 USB-C 接口。 这件事不如“机器人会聊天了”抓眼球,但基础设施从来就不是靠抓眼球活下来的。只有先把接口层做清楚,后面的多 agent、调度、长期运行才不是空中楼阁。
二、rosaOS:当所有人都在聊 Agent,有人开始认真做“机器人操作系统”了
第二个项目 castorini/rosaOS,名字就很不掩饰:ROS Agentic Operating System。
它的核心逻辑不复杂:用户说一句话,不是直接扔给一个大模型去硬解,而是先进 kernel,再决定要不要起 worker、调用哪些 MCP server、走不走 RAG agent,最后再通过 Reachy Mini 说话或动作反馈回来。仓库的 README 把结构写得很清楚——kernel 负责调度和监督 process,process manager 用内部 MCP server 暴露 fork 这样的 syscall 接口,worker subprocesses 各自跑自己的 agent,device layer 把硬件暴露成可调用工具。
连启动顺序都给你写死了:先起 Reachy Mini daemon,再起 MCP server,然后 process manager MCP server,最后 RAG agent,一套一套来。这个味道已经不是“玩个 agent demo”,而是“在搭一台有进程和设备层的机器人计算机”。
这件事最值得看的点,在于它把一个问题提前摆上了台面:机器人 agent 未来比的,可能不单是模型,而是谁的 runtime 更像系统。 谁能把语音、设备、工具、上下文、并发任务、失败恢复组织成一套能长期运行的结构,谁就更可能往前走。rosaOS 现在还很早期,但它已经把问题提到这一步了。
三、Reachy Mini conversation app:应用层开始长出来,而且已经能“装工具”了
第三个项目 pollen-robotics/reachy_mini_conversation_app,补的是第三层:真正给人用的机器人应用层。
仓库首页写得很明确:一个结合实时语音、视觉管线、编排动作库的会话应用。Hugging Face 官方博客同步做了详细说明:现在 Reachy Mini 的对话 app 已经可以通过 MCP 调用托管在 Spaces 上的外部工具,添加新能力不需要改本地代码,一条命令 tool-spaces add 就行。而且这套机制还不是完全裸奔的——工具是否可用,要过 profile 里的 tools.txt,动态扩展和能力边界管理是一起长出来的。
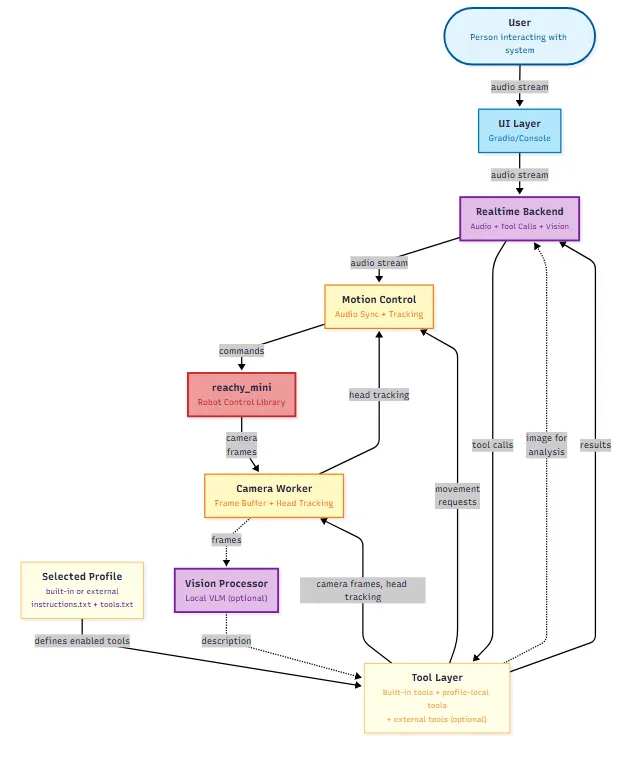
这意味着什么?以前我们说“机器人用工具”,更多是研究语境下的演示。现在 Reachy Mini 这套做法,已经有一点真正的产品逻辑了:本地保留可信的内建工具,远程 stateless 工具通过 MCP 动态扩展,能力由 profile 控制,外部工具不必下载到本地代码库。一旦这个方向成熟,机器人生态会很快从“每个团队自己写 skill”,走向“我给机器人装 app、装工具、装 profile”。
这就不只是 agent 了。这更像一个机器人软件平台的雏形。
写在最后
把三个项目放在一起看,逻辑很清楚。
-
ros-mcp 补桥接层:让 ROS2 世界被 agent 真正看见、调到、用起来。
-
rosaOS 补操作系统层:让机器人 agent 不再只是“一个会调工具的模型”,而是有 kernel、有 process manager、有 device layer 的运行时系统。
-
Reachy Mini conversation app 补应用层:让机器人不只是“能做动作”,而是一个能持续对话、能装远程工具、能被 profile 管理的用户侧应用。
如果只看表面,你会觉得这周不过是又多了几个 MCP + robotics 项目。但把这三条线拼在一起,信号会清楚很多:机器人 Agent 正在从“会调用工具”,走向“像一套系统那样运行”。
这比再多几个演示视频都更重要。因为真正决定一条技术路线能不能走远的,往往不是第一个 Demo,而是桥接层、操作系统层、应用层这些看起来没那么热闹,但会决定系统形状的东西。
-END-
Ask Me Anything|提问箱
❝
对文章有疑惑,或想聊更深?欢迎把你的问题丢给我们:技术方案、实操踩坑、课程与资料、项目合作、职业发展,都可以问。
怎么问:在评论区留言,或私信公众号
我们会做什么:每周集中整理高质量问题并公开回复,重点问题邀请作者或嘉宾深度解答;典型问题会加入知识库并持续更新。
提问小提示:尽量说明「你的目标—当前做法—期望产出」,附上必要信息(硬件/软件版本、数据规模等),能更快获得有用答案。
一起把问题变成知识,推动社区进步 🚀
