 夜雨聆风
夜雨聆风关注本公众号并设星🌟标,不错过最新精彩内容
最近,OpenClaw 成了机器人圈最火的“流量密码”。
只要在产品介绍里加上“接入 OpenClaw”,仿佛机器人立刻就能听懂人话、自主思考、甚至帮你写周报。
但热潮之下,一个关键问题被反复忽略:OpenClaw 本质上是个 Agent,不是控制器。
它擅长的是在虚拟世界里拆解任务、调用工具、串联流程——就像你让豆包或通义千问“帮我查资料、做PPT、发邮件”一样。
可一旦进入物理世界,面对真实的力、摩擦、延迟和不确定性,这套逻辑还能跑通吗?
答案是:能,但有边界。
OpenClaw 的本质:一个免费又强大的“数字员工”
先说清楚 OpenClaw 到底是什么。
它不是一个新模型,而是一个开源的 Agent 框架,核心能力在于:
- 理解复杂自然语言指令;
- 将大任务拆解为可执行子任务;
- 自动调用预设的“技能”(Skill)完成闭环;
- 最终汇总结果返回用户。
举个例子:你说“帮我整理最近两个月发布的人形机器人信息,生成飞书文档”,OpenClaw 会自动分解为:搜索新闻 → 筛选有效信息 → 结构化整理 → 调用飞书 API 创建文档。
整个过程无需人工干预。
它的魔力不在“自己干活”,而在“会派活”。
而最关键的是——它完全开源、免费,且生态活跃,已成为 GitHub 上 Star 数最高的项目之一。

当这样一个“超级调度员”遇上机器人,会发生什么?
三大落地流派:从“遥控器”到“自进化系统”
经过对近期厂商与科研团队实践的梳理,OpenClaw + 机器人的应用大致可分为三类:
一、SDK 直连派:把机械臂当成“可编程外设”
最直接的方式,是将机器人底层 SDK 封装成 OpenClaw 的 Skill。
比如松灵机器人开放七轴机械臂控制接口,宇树 G1 用户则通过自定义模块,让 OpenClaw 能调用感知、运动、抓取等原子能力。
在这种模式下,OpenClaw 充当“高级遥控器”:用户说“拿桌上的红色杯子”,它就调用“识别红色物体 → 规划路径 → 执行抓取”这一串 Skill。
优势是灵活,劣势也很明显:所有动作仍依赖预设接口,无法处理未见过的交互场景。
比如杯子滑了怎么办?桌子歪了怎么调?这些动态适应能力,OpenClaw 本身并不具备。
二、场景触发派:用大模型替代“工作流编辑器”
这是目前主流厂商的选择。
OpenClaw 不直接控制电机,而是作为高层意图理解引擎,识别用户需求后,触发机器人本体已有的功能模块。
例如 Vbot 大头机器人听到“十秒后提醒我喝水”,OpenClaw 解析出“定时+语音提醒”意图,调用内置闹钟 Skill;松延动力的 Demo 中,孩子设定“看到爸妈就挥手”,OpenClaw 负责识别人脸并触发预设动作。
这种方式大幅降低交互门槛,用户无需学习复杂指令,自然语言即可驱动。但能力天花板也清晰:只能调用已有功能,无法创造新行为。
精细操作、复杂物理交互(如拧瓶盖、叠衣服)依然遥不可及。
三、自进化派:让机器人“自己卷自己”
最前沿的探索来自上海交大穆尧团队与智元合作的 RoboClaw。
他们将 OpenClaw 作为“全生命周期管理器”,构建了一个 数据采集 → 模型更新 → 任务执行 → 能力反馈 的自动化飞轮。
具体来说,OpenClaw 不仅下发任务,还监控执行过程,自动标记失败案例,触发新一轮数据收集与模型微调。
通过“纠缠动作对”(Entangled Action Pairs)和过程监督机制,系统能在长时程任务中保持鲁棒性。
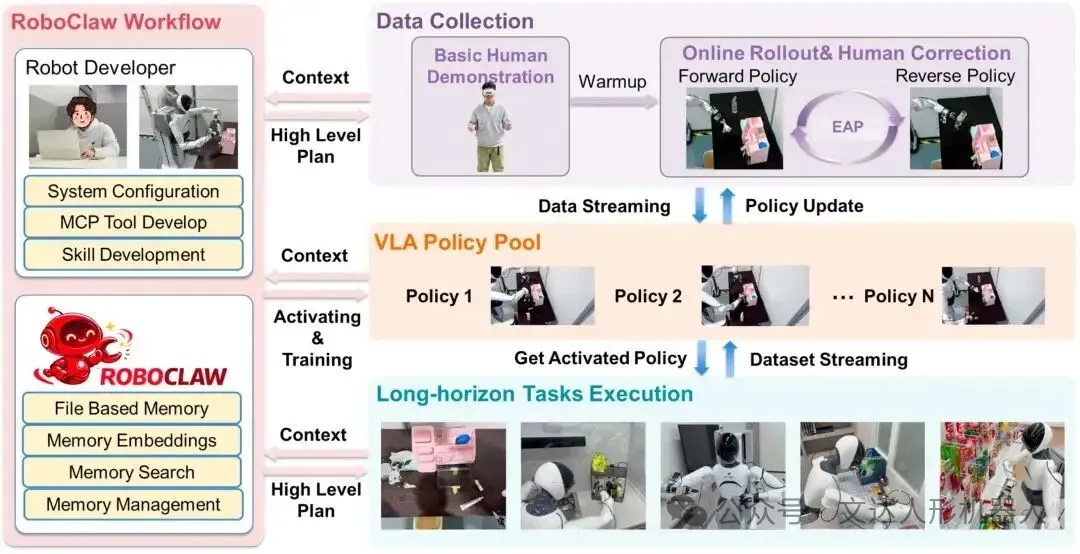
实验显示,该方法将真实场景数据采集效率提升近一倍。
OpenClaw 在这里不再是调度员,而是“机器人教练”——教它如何更高效地学习。
清醒认知:最强外脑 ≠ 全能身体
必须明确:OpenClaw 是“大脑”,不是“小脑”。
它能理解“请帮我泡一杯咖啡”,但无法知道水温多少合适、咖啡粉压多紧、手柄握多大力。
这些物理世界的常识与精细控制,仍需依赖 VLA 模型、世界模型或专用控制器。
当前最务实的架构,是 “分层智能”:
- 上层:OpenClaw 负责语义理解与任务规划;
- 下层:VLA 或传统控制器负责实时动作生成与力控。
这种设计既发挥大模型的泛化理解优势,又规避其在低延迟、高精度控制上的短板。
就像人类大脑发出“拿杯子”指令,小脑和脊髓自动协调肌肉完成动作。
因此,期待 OpenClaw 让机器人明天就能做饭带娃,显然不现实。但它确实能让现有机器人变得更“听话”、更“聪明”、更易用。
理性拥抱“龙虾热”:各角色的务实路径
面对这波 OpenClaw 热潮,不同角色应有不同策略:
OpenClaw 的爆火,某种程度上反映了行业对“低成本智能化”的迫切需求。但热潮之下,需分清“赋能”与“替代”的边界。
算法团队不妨将其视为任务调度与数据闭环的加速器——用它组织感知、规划、执行模块,构建自动化训练流水线,而非指望它直接输出关节力矩。
硬件厂商可借其打造更友好的人机交互层,让用户用日常语言触发预设能力,提升产品易用性,但核心操作仍需依赖扎实的底层控制栈。
终端用户则能率先体验到“说人话就能干活”的便利,比如让机器人查日程、播音乐、巡逻房间,但对复杂家务仍需保持合理预期。
真正有价值的,不是谁“用了 OpenClaw”,而是谁用它解决了真实场景中的效率瓶颈。
写在最后:智能的拼图,才刚刚开始
OpenClaw 的价值,不在于它能单枪匹马造出通用机器人,而在于它提供了一种低成本、高效率的智能集成范式。
它让机器人厂商不必从零搭建对话系统,让研究者快速验证高层策略,也让用户真正用自然语言与机器对话。
但物理世界的复杂性,终究无法仅靠语言模型跨越。真正的具身智能,需要“理解力”与“执行力”的深度耦合。
OpenClaw 是这场革命的重要拼图,但不是全部。
如需转载,请注明出处
