 夜雨聆风
夜雨聆风如果你最近在看具身智能、机器人 Agent、自然语言控制机器人,应该已经注意到一个越来越常见的组合:OpenClaw + ROS 2。
这套东西真正值得关注,不是因为“给机器人接了个聊天框”,而是因为它开始尝试把大模型放进真实的机器人软件栈。
结合 OpenClaw 官方文档、ROSClaw 论文,以及 ros2_control、Nav2、MoveIt 2、rosbridge 的资料来看,结论其实很明确:
OpenClaw 很适合做机器人的自然语言入口和 Agent 编排层,但绝对不适合直接下沉到底层控制。
模型可以理解“去厨房”“把杯子拿过来”“退后 20 厘米”。但它不该直接决定每一个电机这一毫秒该怎么转。
真正要解决的问题,从来不是“AI 能不能控机器人”,而是:如果你真的要把 OpenClaw 通过 ROS 2 用到机器人上,怎样做才更安全、更精确、效果也更好。
先说结论
先把最重要的判断放前面。
一句话结论:让 OpenClaw 负责理解,让 ROS 2 负责执行,让中间层负责否决。
拆开来说,正确的分工应该是:
OpenClaw 负责理解用户意图、拆解任务、选择能力、组织反馈 ROS 2 负责真实执行、实时控制、限幅、回退和安全约束 中间必须有一层“执行前验证”的桥接层,不能让模型直接碰总线和驱动
如果没有这层中间层,所谓“自然语言控制机器人”就很容易从 Demo 变成事故生成器。
原因不复杂:大模型擅长的是意图理解和高层决策,而机器人执行要求的是实时、确定、可验证、可回退。这两者不是一回事。
为什么 OpenClaw + ROS 2 值得关注
先看最新项目状态。
OpenClaw 官方仓库 到 2026 年 4 月初已经是一个非常活跃的项目,GitHub 页面显示约 34.7 万 Star。从 官方 Getting Started 文档 来看,它的定位很清楚:这是一个运行在你自己的设备上的 AI Assistant 框架,负责多通道接入、会话、工具调用、技能编排和 Gateway 管理。
官方给出的最短安装路径大概是这样:
curl -fsSL https://openclaw.ai/install.sh | bashopenclaw onboard --install-daemonopenclaw gateway status另一边,ROSClaw 项目 则是在做一件更有意思的事:把 OpenClaw 接到 ROS 2。
它的 README 里把数据链路写得非常清楚:
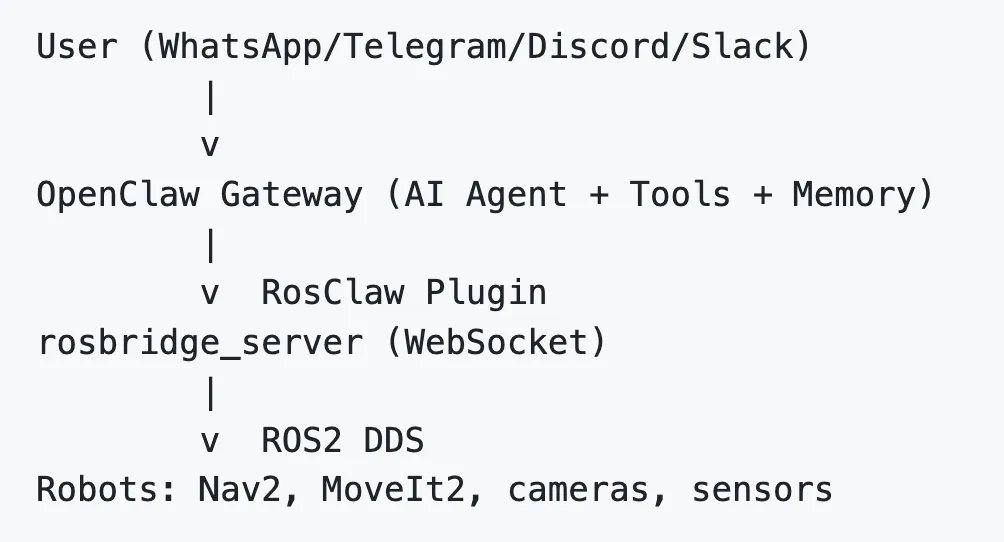
这条链路很关键。
因为它说明这件事不是“模型 SSH 上机器人直接乱发命令”,而是通过 RosClaw 插件 + rosbridge_server + ROS 2 标准接口 接入机器人软件栈。这个方向之所以值得认真看,就是因为它天然比“模型直连底层控制”更可治理。
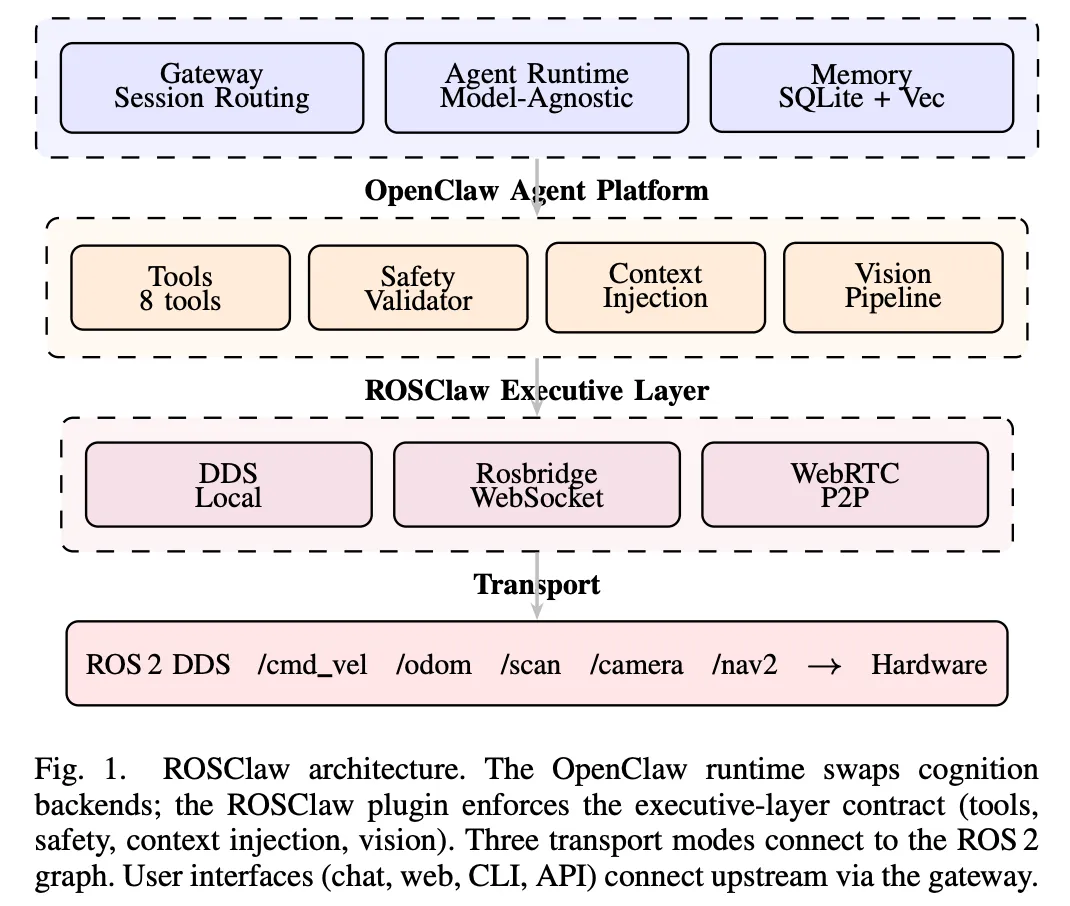
更值得注意的是,ROSClaw 论文 在 2026 年 3 月 27 日提交到 arXiv,摘要里明确强调了四个核心设计:
动态能力发现 多模态观测归一化 执行前动作校验 结构化审计日志
如果你做过机器人系统,就会知道这四件事其实是在说同一句话:
别让模型裸奔。
真正合理的架构,不是“AI 直接控机器人”
如果你准备把这套方案做成一个真正能跑的系统,我建议采用四层架构。
第一层:OpenClaw 只做入口和编排
OpenClaw 最适合负责这些事情:
接收来自微信、Telegram、Slack 等通道的自然语言指令 结合上下文理解用户到底要机器人做什么 选择应该调用哪个机器人能力 把结果、状态和失败原因再组织成人能看懂的话返回给用户
这一层像一个“理解器”和“协调器”。
它不该是实时控制器。它也不该直接连电机、驱动或者底层总线。
第二层:RosClaw 或自定义插件负责语义翻译
根据 ROSClaw README,当前可用的能力包括:
ros2_publishros2_subscribe_onceros2_service_callros2_action_goalros2_param_get/setros2_list_topicsros2_camera_snapshot
这里我要非常明确地说一句:
不要把这些底层原语原封不动地交给大模型。
这不是哪份文档里的原话,这是我基于 OpenClaw、ROSClaw、rosbridge、Nav2 和 MoveIt 2 的边界分析之后给出的工程建议。
原因很简单。像 ros2_publish 这种能力太强了,它几乎等于“模型可以向任意 topic 发任意消息”。而 rosbridge_suite 官方仓库 也说明了,它本质上就是一个让外部系统通过 JSON 去发布、订阅、调 service 的桥。
如果你追求的是安全和精度,真正应该暴露给模型的,不是这些底层能力,而是高层能力面,例如:
navigate_to_named_place(name)move_base_relative(x, y, yaw)pick_object(object_id)dock_to_charger()read_battery()emergency_stop()
这两种设计的区别非常大。
前者是把总线权限交给模型。后者是把任务语义交给模型。
我会毫不犹豫地选后者。
第三层:ROS 2 执行层负责真实控制
真正碰执行链路的,应该是 ROS 2 那一层。
移动机器人,优先交给 Nav2。机械臂,优先交给 MoveIt 2 或 MoveIt Servo。底层硬件和关节控制,则统一收敛到 ros2_control。
ros2_control Controller Manager 文档 里有两个参数特别值得注意:
fallback_controllersenforce_command_limits
前者的意义是,主控制器出问题时,可以自动切换到回退控制器。后者的意义是,系统会根据 URDF 里的 joint limits 去强制裁剪命令。
这两个能力看起来不花哨,但在 AI 控机器人这个问题上,它们非常重要。
因为它们代表的是:即便上层做错了,下层也不至于完全失控。
第四层:硬件安全层做最终兜底
这一层千万别省。
Nav2 Collision Monitor 文档 明确说过,它能提供额外的近场防撞能力,但它不是硬实时安全认证方案。
这意味着什么?
意味着软件层的防撞、限速、停障都很有价值,但它们不能替代:
硬件急停 电源或驱动级急停回路 安全雷达或安全光幕 人机混行场景下的物理隔离 分区限速和禁行区
如果你的机器人真的要进办公室、仓库、展厅或者实验室,最后替你兜底的,一定不能只有提示词和软件逻辑。
怎么落地,才不会一开始就走歪
我建议按下面这个顺序来搭。
第一步:先把 OpenClaw 单独跑通
先按照官方文档把 OpenClaw Gateway 跑起来。
从官方资料和 ROSClaw README 来看,优先使用 Node 24 会更省心,因为两边的环境要求更容易对齐。
这一阶段先只验证三件事:
会话和 Agent 是否正常 工具调用链路是否正常 Gateway 是否稳定
别一开始就把它接进群聊,更别一开始就给真机器人权限。
第二步:先接仿真,不要先接真机
ROSClaw README 给出的最短演示路径很直接:
pnpm installpnpm buildcd dockerdocker compose up这会拉起 ROS2 + rosbridge + Gazebo。然后把 OpenClaw 配到 ws://localhost:9090。
这一阶段最重要的不是“演示酷不酷”,而是看三件事:
模型会不会选错工具 工具会不会把参数映射错 执行后的反馈能不能再被模型正确理解
很多系统在 Demo 时看起来没问题,一上真机就露馅,问题往往就出在这里。
第三步:从“开放总线”收缩到“安全能力面”
这一步很容易被忽略,但它往往最决定系统最后是“能演示”还是“能落地”。
研究型项目为了灵活,通常会开放很多通用能力。但生产型系统最忌讳的,恰恰就是“太自由”。
一个移动机器人的首版能力面,我建议尽量收缩到这几个:
导航到已命名地点 在相对坐标内微调 读取当前位姿 读取电量 获取一张当前画面 停车 急停
不要一上来就给:
任意 topic publish 任意 parameter set 任意 service call 任意脚本执行
功能越自由,调试时越爽。但事故概率也会一起涨。
第四步:把模型输出改成结构化任务
如果你真的在乎精度,就不要让模型输出一段模糊的自然语言,再让下游去猜。
更好的方式,是要求模型输出结构化任务,比如:
{"task": "navigate_to_pose","target_frame": "map","x": 2.15,"y": -0.84,"yaw": 1.57,"max_linear_speed": 0.25,"safety_mode": "indoor_human_shared"}这样做的价值非常现实:
单位清楚 参数边界可以校验 任务意图可以审计 出问题时可以回放
这也和 ROSClaw 论文 里强调的执行前验证、结构化日志高度一致。
安全这件事,不能只靠提示词
很多团队一碰到 Agent 控机器人,第一反应就是“把 system prompt 写严谨一点”。这当然有帮助,但远远不够。
OpenClaw 官方安全文档 说得很清楚,真正的安全约束来自:
tool policy 执行审批 sandbox channel allowlist
换到机器人场景里,我认为至少要补上四层约束。
1. 把 Gateway 暴露面缩到最小
官方文档明确建议:
gateway.bind: "loopback"默认只允许本机访问非 loopback 绑定会扩大攻击面 不要把未认证 Gateway 直接暴露到 0.0.0.0WebSocket 要启用 token 或 password
这件事在机器人场景里尤其重要,因为一旦 Gateway 暴露过大,你失去的不只是聊天权限,而是现实世界里的行动权限。
所以更稳妥的做法是:
开发阶段只允许本机访问 远程调试优先走内网或 Tailscale 不直接暴露公网 多用户场景做会话隔离
官方还建议多人 DM 场景使用 session.dmScope: "per-channel-peer" 之类的会话隔离策略。这个点放到机器人控制里,我认为几乎是必需的,因为你绝不希望不同用户的上下文彼此污染。
2. 把高风险工具隔离出去
OpenClaw 文档对 exec、browser、web_fetch、web_search 这类工具的风险提示是很明确的。
这件事放到机器人里,最合理的策略是:
负责控机器人的 Agent 只保留机器人相关工具 网页检索、文档阅读、代码执行,拆给独立的只读链路 不要让同一个 Agent 既能上网找资料,又能直接给机器人下动作
这不是形式主义,而是在降低“模型被外部内容污染后直接影响真实执行”的概率。
3. 在 ROS 2 执行前做第二次约束
这层约束至少应该包括:
topic、service、action 白名单 参数 schema 校验 速度上限 加速度和角速度上限 地图边界检查 禁区检查 高风险任务黑名单
举个最简单的例子:“后退 5 米”在空旷仓库可能没问题,但在办公室里,大概率就不合理。
所以更好的做法,不是让模型自己判断环境,而是在工具层直接拒绝不符合规则的动作。
4. 对危险动作启用人工确认
不是所有动作都该自动执行。
下面这些动作,我建议默认都走人工确认:
长距离移动 机械臂抓取 靠近人机混行区 靠近门、电梯、玻璃或楼梯 修改运行参数 切换控制模式
真正好的体验,不是“AI 什么都自己干”,而是“AI 先把计划说清楚,再由人确认要不要执行”。
想要精确,关键不是让模型更聪明
很多人对“精确”的理解,还停留在“换个更强的大模型”。
但在机器人控制里,精确的核心通常不是模型大小,而是控制分工是否正确。
我的建议非常简单:
大模型负责高层目标 控制器负责闭环控制 传感器负责反馈修正
移动机器人:优先走 Nav2 action,不要迷恋 cmd_vel
ROSClaw README 里展示过两类典型能力:
用 /cmd_vel做相对运动用 Nav2 goal 做到点导航
如果是做演示,两种都可以。如果你在乎稳定性,我会更推荐 Nav2 action。
原因很简单:直接发 cmd_vel 更像手搓遥控;而给 Nav2 一个目标,等于是把路径规划、局部避障、速度控制交给成熟导航栈。
这通常会更稳,也更容易叠加安全能力。
同时,把 Nav2 Collision Monitor 打开。它不是认证级安全方案,但对于近场减速和刹停非常实用。
机械臂:优先走 MoveIt 2 / MoveIt Servo,不要裸发关节命令
MoveIt Servo 官方文档 明确提到,它支持奇异点检查、碰撞检查、平滑和关节速度限制,而且在接近奇异点或碰撞时会降低速度。
这就是为什么我不建议让 OpenClaw 直接生成一串关节角度命令。
更合理的分工应该是:
模型提出末端目标或抓取目标 MoveIt 做 IK、碰撞检查和轨迹规划 Servo 做实时伺服和限速 ros2_control做最终命令裁剪和执行
这么分层,精度通常会比“模型直控关节”高很多,风险也会小很多。
想让整体效果更好,必须把反馈链路做完整
机器人场景里,“效果好”不是指它看起来很聪明,而是指它在真实环境里不容易飘。
根据 ROSClaw 论文,这套方案强调多模态观测归一化和结构化审计日志。我非常认同这一点,因为机器人一旦脱离反馈,系统马上就会从“会做事”退化成“会说话”。
我建议至少做三件事。
1. 每次执行都记录前态、动作、后态
比如一条“去充电桩”的命令,不要只记录 action 发没发出去,而要记录:
执行前位姿 执行前电量 下发目标 执行过程关键反馈 最终位姿 是否进入充电状态
只有这样,下一轮推理才有真实世界上下文。
2. 给模型看的不是 topic 洪流,而是状态摘要
原始 ROS topic 太碎,也太吵。
真正好用的机器人 Agent,通常会在中间层先做一次状态压缩,比如:
当前位置:会议室门口 导航状态:已到达 机械臂状态:空闲 电量:27% 前方 0.6 米有动态障碍
这比把几十个 topic 原样塞给模型有效得多。
3. 让失败变得可解释
如果动作失败,系统不该只说一句“执行失败”。
它至少应该能说明:
是规划失败,还是控制失败 是目标不可达,还是安全层拒绝 是地图越界,还是电量不足 是碰撞风险,还是控制器异常
很多时候,用户觉得系统“聪不聪明”,不是看成功时它说得多漂亮,而是看失败时它能不能把原因讲清楚。
一套我认为更靠谱的组合
如果你问我,2026 年 4 月这个时间点,怎么把 OpenClaw 和 ROS 2 组合起来更靠谱,我会给出下面这套建议。
推荐组合
OpenClaw 负责多通道接入、会话和 Agent 编排 RosClaw 负责 OpenClaw 到 ROS 2 的桥接 rosbridge_server 只在受控网络里开放 Nav2 负责移动机器人高层导航 MoveIt 2 / MoveIt Servo 负责机械臂规划与伺服 ros2_control负责硬件接口、命令限幅和回退控制器Collision Monitor 负责额外的近场防撞 硬件急停和安全传感器负责最终兜底
不推荐组合
让模型直接控制底层驱动 把 ros2_publish向所有 topic 全开放让同一个 Agent 同时拥有上网、执行 shell、控机器人三类高风险能力 没有仿真验证就直接接真机 只靠提示词做安全
我最后的判断
我认为 OpenClaw + ROS 2 这条路值得认真投入。
因为它终于开始把“大模型会说话”和“机器人能安全做事”拆成两个系统问题,而不是硬糊在一起。
尤其是 ROSClaw 论文里强调的 executive layer 思路,我觉得非常关键。机器人 Agent 真正缺的,从来都不是一个更花哨的聊天界面,而是一个介于模型和执行器之间、能做约束、验证、审计和回退的中间层。
如果你只想做一个看起来很酷的视频,事情不难。但如果你想做一个能真正进入办公室、仓库、展厅或者实验室的系统,那就别让模型直接碰电机。
这不是保守,这是工程。
参考资料
OpenClaw GitHub: https://github.com/openclaw/openclaw OpenClaw Getting Started: https://docs.openclaw.ai/start/getting-started OpenClaw Security: https://docs.openclaw.ai/gateway/security ROSClaw GitHub: https://github.com/PlaiPin/rosclaw ROSClaw 论文: https://arxiv.org/abs/2603.26997 rosbridge_suite GitHub: https://github.com/RobotWebTools/rosbridge_suite ros2_control Controller Manager 文档: https://control.ros.org/rolling/doc/ros2_control/controller_manager/doc/userdoc.html Nav2 Collision Monitor 文档: https://docs.nav2.org/configuration/packages/collision_monitor/configuring-collision-monitor-node.html MoveIt Servo 文档: https://moveit.picknik.ai/main/doc/examples/realtime_servo/realtime_servo_tutorial.html
