 夜雨聆风
夜雨聆风当我们谈论AI的时候,几乎只是在说AI可以为我们完成什么任务:写一封邮件,生成一段代码,总结一次会议,回答一个问题。然而,AI真正在做的事情,是压缩信息,连接零散的信号,综合上下文,甚至介入那些原本只属于人的判断。
这一切在航空业已经经历过了。驾驶舱自动化和数字航空电子设备吸收了大部分过去由飞航工程师处理的工作,并将许多飞机的三人制驾驶舱变为两人制。航空业的自动化已经向我们展示了三分之一的工作是怎么消失的。然而我们真正需要从中学习的是,自动驾驶并非是盲目地推进自动化。它围绕一小套定义明确的部件构建了严谨的系统,并将每一层新的自动化视为这些部件的重新分配。这套理论就叫工程控制论。
钱学森在1954年奠基了工程控制论的理论框架,1981年开始把“人”纳入视野,到1990年代正式提出“人机结合、以人为主”的综合集成研讨厅体系——一个把人的创造性思维和机器的计算能力整合在一起的动态系统。
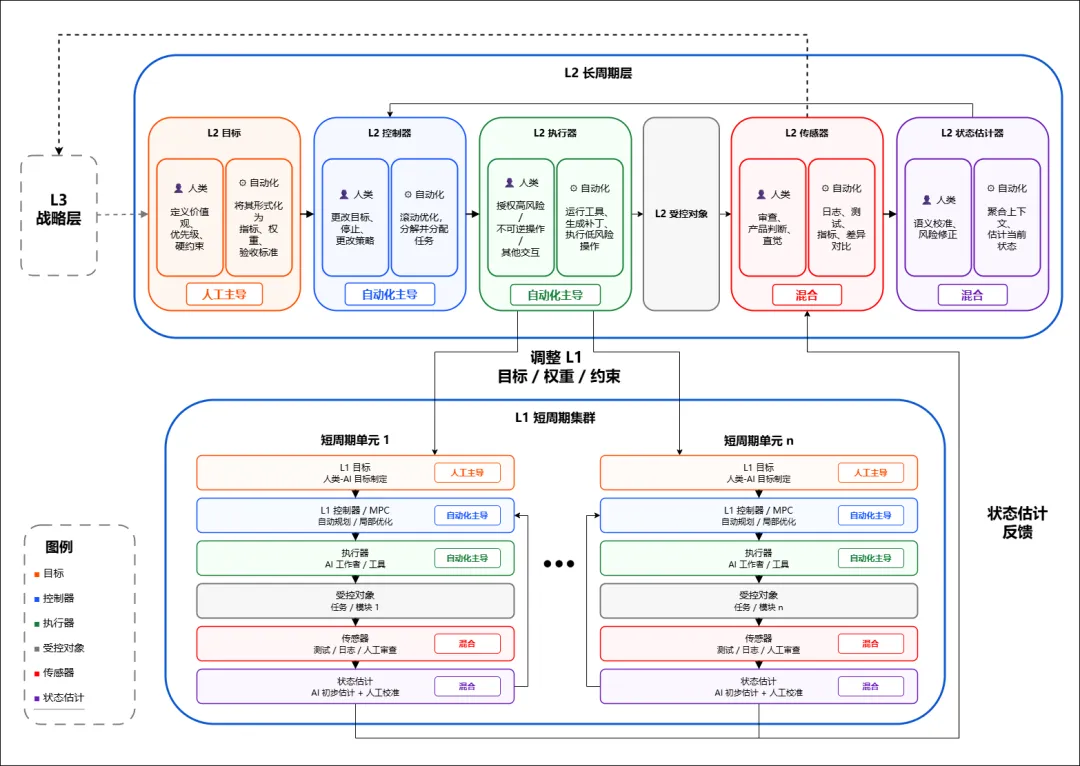
下面这个图就是控制论在ai上的应用。这套系统已经非常成熟,已经被广泛地应用在了自动驾驶领域。
---
目标
目标是各层级之间的接口,由人类主导定义。人类设定价值、优先级和硬性约束,自动化辅助将其形式化为指标与验收标准。上层指令不能直接被下层执行,必须先转化为当前控制窗口内的目标、权重和约束。一个好的目标必须回答:要达成什么?优先什么?底线在哪?如何判断可接受?何时必须暂停或重新讨论?人类始终保留否决权。当目标无法被下一层转化为局部控制问题时,它对系统就是噪音。
控制器
控制器根据状态估计器的输出选择下一步动作。它不直接触及真实世界,而是基于被估计、压缩且不确定的状态来决策。其核心运作类似模型预测控制(MPC):预测未来几步,选择当前最佳动作,仅执行第一步,等待新反馈后重新估计和计划。控制器的核心问题是:给定当前约束和状态,下一步如何做才能最好地保全未来的可控性?当信心不足、风险高或约束裕度过小时,控制器应放慢速度、缩小动作范围或请求人工复核,而非盲目推进。
执行器
执行器将控制器的决策转化为实际行动,但它永不做决策。分配任务、调用工具、修改文件,均由它完成,但目标、权重、约束和许可边界的改变不在其权限内。低风险动作可自动执行,但必须可追溯、可逆、可审计。高风险或不可逆动作的授权必须来自人工授权门或上层控制器。执行器仅验证授权、执行动作、记录日志并提供回滚切入点。一旦执行器实质上绕过复核、扩大权限或降低验收标准,它就越界接管了控制器的权力。
受控对象
受控对象是控制动作实际改变的那个实体。一个受控对象只能由一个单一控制器控制,且必须有对应的传感器和状态估计器。它可以是代码模块、智能体团队、业务流程或组织单元。系统必须明确:它的关键状态是什么?哪些动作可改变它?哪些改变可逆、哪些不可逆?哪些状态目前不可观测?其状态转移受系统自身动作和外部扰动共同影响。当一个系统能改变一个对象却不能观察其关键状态时,就陷入了开环自动化——这是控制论架构必须避免的局面。
传感器
传感器收集环境信号——指标、日志、测试结果、差异、人工复核、用户行为、产品判断和外部环境变化。传感器设计取决于控制目标。好的传感器应避免同代路径的污染,应当尽可能从独立来源获取信号。传感器的输出是观测值,但真实状态通常无法完全观测,必须由状态估计器结合模型和校准来还原。
状态估计器
状态估计器是系统的核心。控制器从不直接对真实世界行动,而是基于估计状态。估计器的工作是:预测状态,预测观测,与实际观测比较得出残差,再结合传感器可靠性、模型可靠性和人工校准来更新信念。其输出是结构化的状态估计,包含状态描述、置信度、不确定性来源、风险水平、约束裕度、残差解释、异常信号和升级建议。
状态估计器必须是人机混合的。AI擅长在现有框架内进行初步估计——日志分析、指标监控、差异追踪、上下文压缩和异常模式发现。但经验丰富的人类增加的是高维状态感知:产品意义、用户信任、组织张力、风险累积、时机、品味、战略漂移,以及当前问题框架本身是否错误。这在残差出现时尤为重要。一个残差可能是噪音,但也可能揭示当前状态空间缺少一个关键维度。经验丰富的人类通常在任何正式传感器存在之前就注意到这一点。持续存在的残差不只是一个错误信号,它是在请求更新系统模型本身。
反馈回路
反馈在两个层面运作。层内,受控对象的改变被传感器观察,经状态估计器解释后返回控制器,使下一步动作基于现实而非原始计划。跨层,状态估计器将压缩后的状态反馈给上层,驱动目标、权重或约束的修正。反馈的价值在于质量而非数量。低价值反馈仅重述系统自身的叙事,如例行周报、AI自评或孤立KPI。高价值反馈能改变下一个控制动作,如可复现实验、独立复核、真实用户行为和持续存在的残差。持续存在的残差是一个特殊信号:它可能不是噪音,而是在请求更新系统模型本身。
---
通过控制论拥抱AI
人类对AI的使用伴随着模型能力的成熟而演进:从提示工程,到RAG,到AI智能体,再到harness engineering。每一步都将问题提升了一层。提示词工程解决的问题是如何与模型对话。RAG解决如何为AI的回答提供可靠的依据。智能体解决如何让AI与真实的世界互动。harness engineer解决如何在AI在系统内部进行大量生成、决策和报告时,保持系统诚实、可观测和可恢复。
到现在,当你harness AI的时候,AI也在harness你。于是人- AI共同组成的控制系统应运而生。
AI改变了人类脑力劳动的效率。随着模型能力增强,它们对现有工作流产生两个同时发生的爆炸效应。第一个是行动爆炸——更多的代码、更多的原型、更多的模拟,以及比任何团队能手动追求的更多的并行探索路径。第二个是信息爆炸——从行动中返回的更多的追踪、总结、评估和中间决策,超出人类能手动检查、吸收或纠正的范围。瓶颈从生产工作转向了理解工作:知道了什么被做了,为什么被做,现实中改变了什么,以及我们现在处于什么位置。控制论给了我们一种组织这股力量的方法。它正是为这种不对称性而建立的:人的一点点想法,通过纠正性的反馈体系,就可以驾驭大量的自动化行动。
在一个人机控制论系统中,能力爆炸变成了定向探索——更多想法被尝试,更多路径被模拟,更多局部工作得以并行完成,并且每一步都留下系统可以学习的踪迹。信息爆炸变成了人和ai的共同组成的引擎——AI将信号洪流压缩成一幅系统真实状况的图景;人类则解读这幅图景中蕴含的意义、风险,以及数字无法言说的东西。
人类带来价值观、判断力、品味、责任感,以及在不确定性下做出承诺的意愿。AI带来规模、记忆、不知疲倦的注意力,以及看到任何单一头脑都无法容纳的模式的能力。过去需要一个季度的事现在只需一周。那些曾未经探索便消亡的想法得以重见天日。错误被某个一直在关注的人或事物更早地捕捉到。这就是控制论将AI能力转化成的:不仅仅是更快的产出,而是可观测、可纠正、持续增长的人机协作工作——一个运行得越久,就越敏锐、越扎实、越值得信赖的系统。
