 夜雨聆风
夜雨聆风1. 创意背景 (Background)
痛点分析: 传统工业夹具(如气动夹爪、真空吸盘)在面对异形件、软质物体、多孔透气体或未知物体时,往往力不从心。袋式夹具虽能通过包裹提供大面积接触,但现有产品多为被动式,无法根据物体形状动态调整内部压力分布,易导致抓取不稳或物体损伤。
技术契机: 随着柔性传感器、微型气泵及边缘计算AI芯片的发展,使得实时感知物体轮廓并预测最佳抓取策略成为可能。
应用场景: 电商物流分拣(大小不一的快递)、生鲜处理(易损水果)、医疗废弃物回收、家庭服务机器人整理杂物。
2. 设计思路 (Design Philosophy)
采用“感知-决策-执行”的闭环控制理念。
形态模仿: 模仿人类手掌抓取不规则物体时的肌肉收缩与皮肤贴合机制。
分区控制: 将单一的“袋子”划分为多个独立的气动微腔室。
AI赋能: 引入深度学习模型,使夹具不仅能“抓”,还能“懂”物体的物理属性(硬度、重心),从而实现从“刚性包裹”到“柔性顺应”的质变。
3. 特征 (Features)
超柔顺应性: 采用高弹性TPU复合材料,可包裹复杂几何形状。
多模态感知: 集成触觉(压力阵列)与视觉(微型摄像头/ToF)传感器。
动态刚度调节: 根据物体易碎程度,AI自动调整夹持力,实现“刚柔并济”。
自学习优化: 每次抓取后的数据回传云端,通过联邦学习不断优化抓取模型。
4. 用途 (Applications)
工业4.0: 杂乱工件分拣(Bin Picking),特别是针对无CAD模型的未知物体。
智慧物流: 全自动包裹分拣线,兼容纸箱、软包、气泡膜信封。
特种作业: 核废料处理、深海采样,避免人员直接接触危险物。
辅助生活: 残障人士护理机器人,轻柔抓取眼镜、手机等细小物品。
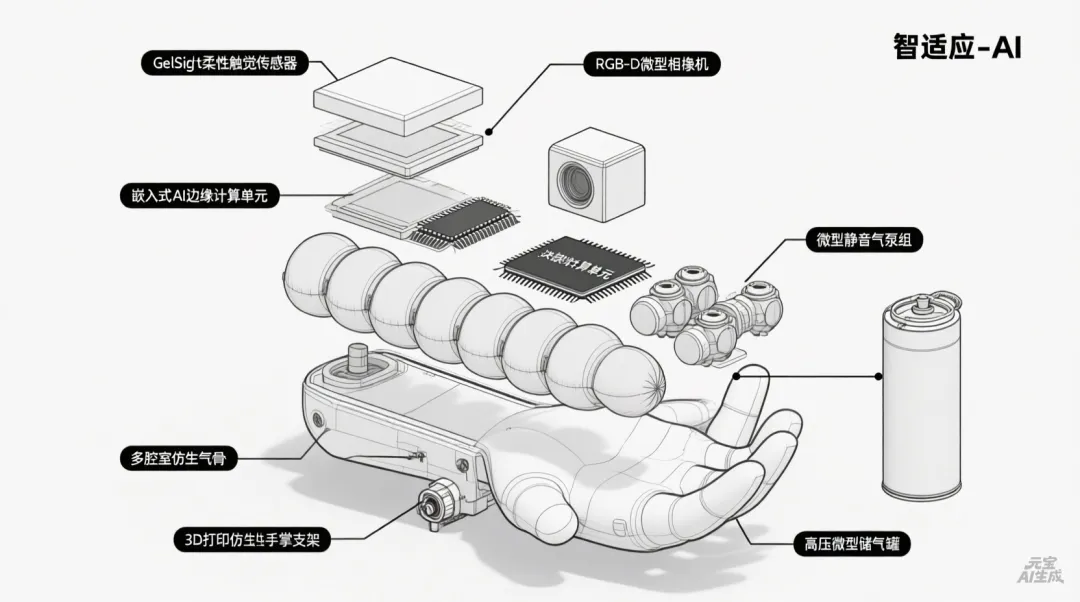
5. 构思器件组成 (Components)
模块 | 核心器件 | 功能描述 |
|---|---|---|
感知层 | GelSight柔性触觉传感器 + RGB-D微型相机 | 实时采集物体表面纹理、形状点云及接触压力分布。 |
决策层 | 嵌入式AI边缘计算单元 (如Jetson Nano/Xiaomi CyberDog芯片) | 运行轻量化CNN神经网络,进行物体识别、位姿估计及抓取稳定性预测。 |
执行层 | 多腔室仿生气囊 (5-7个独立气室) + 微型静音气泵组 | 独立控制各腔室充气/放气,实现局部塑形与整体包裹。 |
结构层 | 3D打印仿生手掌支架 + 快换接口 | 连接机械臂末端,提供结构支撑与快速更换能力。 |
能源层 | 高压微型储气罐 | 提供瞬时充气动力源,减少气泵响应延迟。 |
6. 作品运行流程图 (Operational Flowchart)
graph TD
A[启动与自检] --> B{视觉预扫描 (RGB-D)};
B --> C[AI物体识别与粗定位];
C --> D[机械臂移动至目标上方];
D --> E{接触式精细感知<br>(触觉阵列反馈)};
E --> F[AI模型推理: <br>1. 物体材质硬度<br>2. 重心位置<br>3. 最优包裹姿态];
F --> G[生成多腔室气压控制序列];
G --> H[执行自适应包裹动作];
H --> I{稳定性监测<br>(压力波动分析)};
I -- 稳定 --> J[执行搬运/放置任务];
I -- 滑移/不稳 --> K[动态调整气压/重新抓取];
K --> I;
J --> L[任务完成,数据上传云端迭代];7. 科学原理 (Scientific Principles)
流体力学与帕斯卡原理: 利用封闭流体传递压强,通过控制不同腔室的压差,实现对物体表面的非均匀贴合。
摩擦学原理: 通过增大接触面积(A)和AI优化的法向压力(N),最大化静摩擦力(F=μN),防止物体滑落。
深度学习 (Deep Learning): 采用卷积神经网络 (CNN) 处理视觉图像,结合图神经网络 (GNN) 处理触觉拓扑图,预测抓取品质分数 (Grasp Quality Score)。
材料力学: 选用超弹性体材料,遵循Mooney-Rivlin本构模型,确保在大变形下的回弹性和耐用性。
8. 创新点 (Innovation Highlights)
AI驱动的形态重构: 不同于传统被动变形的软体手,本设计通过AI主动控制每个气室的“膨胀策略”,实现预测性包裹而非反应性变形。
触觉-视觉融合导航 (Multi-modal Fusion): 解决单一视觉在遮挡、透明物体上的失效问题;利用触觉数据修正视觉识别的位姿误差。
基于数字孪生的预训练: 在实际抓取前,利用NVIDIA Isaac Sim等平台进行数百万次虚拟抓取训练,大幅缩短现实世界的试错周期(Sim2Real Transfer)。
能耗自优化算法: AI会学习如何以最低的气压消耗完成抓取,延长设备续航(针对移动机器人)。
9. 预期效益 (Expected Benefits)
经济效益:
降低破损率: 预计将物流分拣中的易碎品破损率从3%降低至0.5%以下。
提高通用性: 一套夹具替代传统3-5种专用夹具,降低企业设备采购成本30%以上。
社会效益:
人机协作安全: 柔性接触特性极大降低了工业机器人对人造成伤害的风险。
推动智能制造: 为应对小批量、多品种的生产模式提供关键技术支撑。
技术效益:
形成一套通用的“软体抓取AI数据集”,推动行业开源发展。
总结
这款“智适应-AI”袋式夹具不仅仅是机械结构的改良,更是将抓取问题转化为一个实时优化问题。通过引入人工智能,它让夹具具备了“观察、思考、适应”的能力,是迈向通用型机器人操作(General-Purpose Robotic Manipulation)的重要一步。
