夜雨聆风
夜雨聆风
大家好,我是好奇喵。
今年9月,北航、北理、北邮三所高校要开一个全新专业——"具身智能"。
本喵喵第一反应:啥?AI不是一直只有脑子没身体吗?现在终于要有身体了?
今天聊聊这个"有身体的AI",以及为什么它可能是未来十年最火的专业。
先搞清楚:什么是"具身智能"?
简单说,就是给AI装个身体。
你手机里的Deepseek,属于"离身智能"——它只有脑子(算法),没有身体。它能跟你聊天、写诗、做题,但让它帮你倒杯水?做不到,因为它根本没有手。
具身智能不一样。它不只是会思考,还能感知环境、做出动作、跟物理世界互动。
举个例子:
工厂里的机械臂,以前只能按固定程序重复动作。你让它换个零件,得重新编程。具身智能的机械臂呢?它能"看懂"零件位置,自己规划抓取路线,放歪了还能调整。你告诉它"把那个红色的拿过来",它真的能听懂、找到、拿起来。
再举个例子:
波士顿动力的机器人Atlas,能跑能跳能后空翻。但它以前靠的是预设程序——工程师把每个动作都编好,它照做。具身智能的机器人呢?它能在没走过的路面上自己找平衡,摔倒了自己爬起来,遇到障碍物自己绕过去。
区别在哪?
离身智能:输入文字→输出文字,世界对它来说是一串符号。具身智能:输入传感器数据(摄像头、触觉、距离)→输出动作,世界对它来说是真实的物理空间。
本喵喵用一句话总结:离身智能是"纸上谈兵",具身智能是"真刀真枪"。
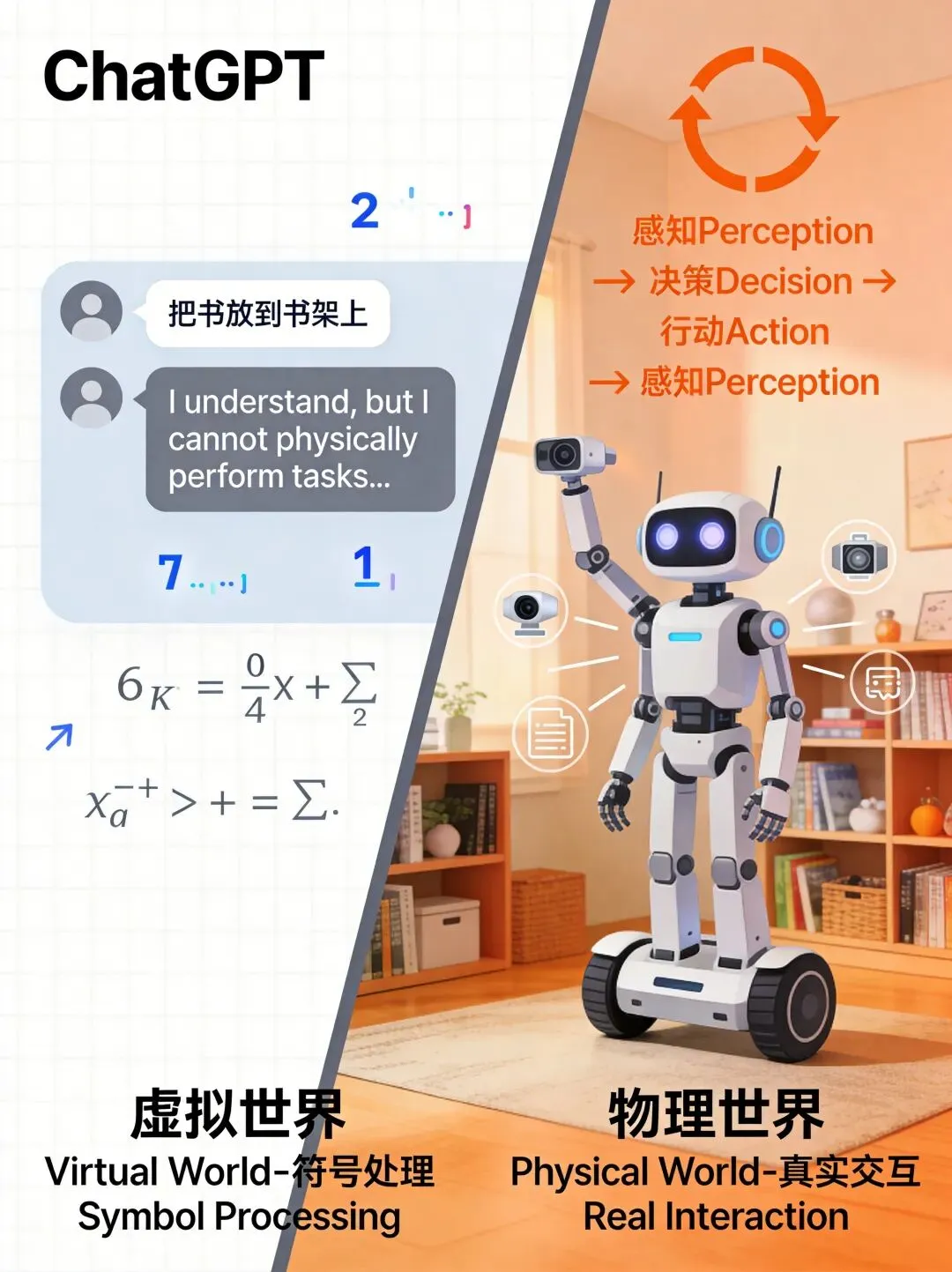
左:离身智能——虚拟世界,符号处理;右:具身智能——物理世界,感知-决策-行动闭环
为什么现在才火?
三个条件刚好凑齐了。
第一,AI大脑够用了。大语言模型让机器"听懂人话"成为可能。以前你跟机器人说"帮我把桌子上的书放到书架上",它根本不知道"书""桌子""书架"是什么。现在大模型能把这个自然语言指令,翻译成机器能理解的坐标和动作序列。
第二,传感器便宜了。激光雷达、深度摄像头、触觉传感器,以前一套几十万,现在几千块就能买到不错的。机器"看"和"摸"的成本降下来了。
第三,算力跟上了。训练一个能走路的机器人,需要在虚拟环境里模拟几百万次摔倒和爬起。以前算不起,现在云计算让这成为可能。
三个条件一凑,"有身体的AI"从科幻变成了工程问题。
三所高校,三种打法
北航、北理、北邮,三所学校风格完全不同。
北航——造飞机的,强项在航空航天和机械。它的具身智能专业,大概率偏"硬":机器人结构设计、飞行器控制、高精度机械臂。如果你想造一个能在火星上走路的机器人,北航很合适。
北理——军工背景,强项在自动化和武器系统。它的具身智能,可能更偏"准":精确控制、实时响应、复杂环境适应。如果你想让机器人在战场或灾区自主行动,北理有优势。
北邮——通信和计算机强校,强项在算法和网络。它的具身智能,会更偏"软":多模态感知(让机器人同时看懂图像、听懂语音、感知触觉)、云端协同(机器人大脑在云端,通过网络实时更新)。北邮还有个"元班",本研贯通,8年直接拿博士学位。
本喵喵总结:
喜欢造东西、摸硬件→北航 喜欢精确控制、系统工程→北理 喜欢写算法、搞智能→北邮

北航(蓝)-硬件强、北理(绿)-控制强、北邮(橙)-算法强
这个专业学什么?
具身智能是交叉学科,课程表看起来像个"大杂烩"。
数学基础:高等数学、线性代数、概率统计——这三门是AI的"母语",不会就别看后面的了。
计算机核心:数据结构与算法、机器学习、深度学习、计算机视觉——这是AI的"脑子"。
机械与控制:理论力学、机器人学、自动控制原理、传感器技术——这是AI的"身体"。
交叉融合:多模态感知(让机器人同时看懂、听懂、摸到)、强化学习(让机器人在试错中成长)、人机交互(让机器人理解人的意图)。
本喵喵提醒:这个专业不轻松。你既得会写代码,又得懂力学;既得调神经网络,又得拧螺丝。适合那种"文理兼修、软硬通吃"的同学。
未来能干什么?
本喵喵列几个方向,都是未来5-10年大概率爆发的:
家庭服务机器人。现在的扫地机器人只能扫地,未来的家庭机器人能做饭、叠衣服、照顾老人。具身智能是核心技术。
自动驾驶。L4/L5级自动驾驶,本质上就是"汽车这个身体+AI这个大脑"。特斯拉的FSD、百度的Apollo,都在招具身智能方向的人才。
工业自动化。柔性制造——工厂不再是一条生产线只造一种产品,而是机器人根据订单自动切换、自动调整。这需要机器人有"理解任务、自主规划"的能力。
医疗机器人。手术机器人、康复机器人、护理机器人,都需要精准感知和精细操作。具身智能让机器人从"按程序执行"变成"理解场景、自主决策"。
太空探索。月球基地、火星探测,不可能靠地球遥控——信号延迟太严重。机器人得自己看、自己判断、自己行动。具身智能是必选项。
这些知识点高考可能考到
物理:力学——牛顿运动定律在机器人控制中的应用;刚体转动惯量与机械臂设计;摩擦力与机器人行走稳定性。
数学:概率统计——贝叶斯推断在传感器融合中的应用;线性代数——矩阵运算在机器人坐标变换中的应用;优化算法——梯度下降在强化学习中的应用。
生物:神经科学——人脑运动皮层的工作原理(为机器人控制算法提供灵感);感觉系统——视觉、触觉、本体感觉的神经机制(对应机器人的多模态感知)。
信息技术:人工智能——机器学习的基本原理(监督学习、无监督学习、强化学习);计算机视觉——图像识别、目标检测、深度估计;传感器技术——激光雷达、深度摄像头、IMU(惯性测量单元)的工作原理。
通用技术:系统设计——反馈控制的基本原理(输入→处理→输出→反馈);工程思维——模块化设计、迭代优化、故障容错。
来做几道题练练手
(物理·选择题) 机器人在水平地面上匀速行走时,地面对机器人脚部的摩擦力方向是( )
A. 始终向前
B. 始终向后
C. 脚部向后蹬地时向前,向前摆动时向后
D. 与运动方向无关
(信息技术·选择题) 以下哪项技术最不属于"具身智能"的核心技术?( )
A. 计算机视觉(让机器人"看见"环境)
B. 自然语言处理(让机器人"听懂"指令)
C. 数据库管理(存储和查询大量数据)
D. 强化学习(让机器人通过试错学习动作)
(数学·应用题) 一个机器人手臂需要从A点(0,0)移动到B点(3,4),假设手臂由两段组成,第一段长3,第二段长2。问:这个机器人能否直接到达B点?如果不能,最短需要几段?(提示:用三角形两边之和大于第三边判断)
(通用技术·简答题) 结合材料,分析为什么"具身智能"需要同时发展"感知能力"和"行动能力",并说明如果只发展其中一项会出现什么问题。
答案在下面,做完再往下看
C
解析:机器人行走时,脚部向后蹬地,地面给脚向前的静摩擦力(这是前进的动力);当脚向前摆动落地时,地面给脚向后的摩擦力(防止打滑)。所以摩擦力方向在行走周期中是变化的。A和B都太绝对;D错误,摩擦力方向与运动阶段密切相关。
C
解析:数据库管理是通用IT技术,不直接涉及"智能体与物理世界的交互"。A计算机视觉是感知能力,B自然语言处理是理解指令的能力,D强化学习是通过环境反馈学习动作的能力,都是具身智能的核心。C虽然重要,但属于"基础设施"而非"智能核心"。
参考答案:
AB两点距离 = √(3²+4²) = √25 = 5
手臂两段总长 = 3+2 = 5
两段之和等于第三边(5=5),说明手臂刚好能伸直到达B点,但没有任何冗余自由度(手臂必须完全伸直,呈一条直线)。
如果B点距离大于5,两段手臂无法到达,需要增加第三段(或移动底座)。
这个例子说明:机器人手臂的"工作空间"取决于关节数量和长度,设计时需要根据任务需求计算最小自由度。
参考答案:
具身智能的核心是"感知-决策-行动"的闭环:
①感知能力让机器人获取环境信息(看到障碍物、感受到温度、听到声音);
②行动能力让机器人改变环境状态(移动位置、抓取物体、施加力)。
如果只发展感知不发展行动:机器人成了"只会看不会动"的监控摄像头,无法完成任何物理任务。比如它能识别出杯子,但拿不到,等于没用。
如果只发展行动不发展感知:机器人成了"蒙眼走路"的瞎子,只能按预设程序行动,遇到意外情况就会撞墙或损坏。比如机械臂按固定轨迹运动,但零件位置变了,它就会抓空。
只有感知和行动协同发展,机器人才能"看懂了再做,做错了再调整",形成真正的智能闭环。
好了,今天的稿子就到这里。我是好奇喵,本喵喵下期见。
喵喵想问问你
如果你有一个具身智能机器人,你最想让它帮你做什么?是"帮我写作业"、"给我做晚饭",还是"陪我去冒险"?评论区留下你的答案,本喵喵看看谁的脑洞最大。
觉得好奇喵的文章有意思?点个关注,下期更精彩。