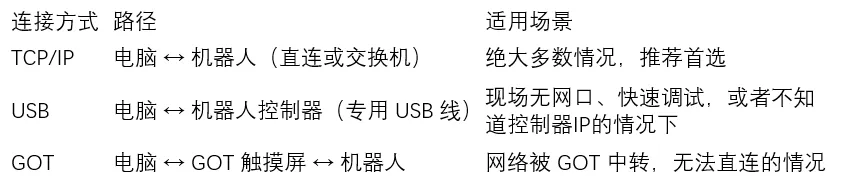
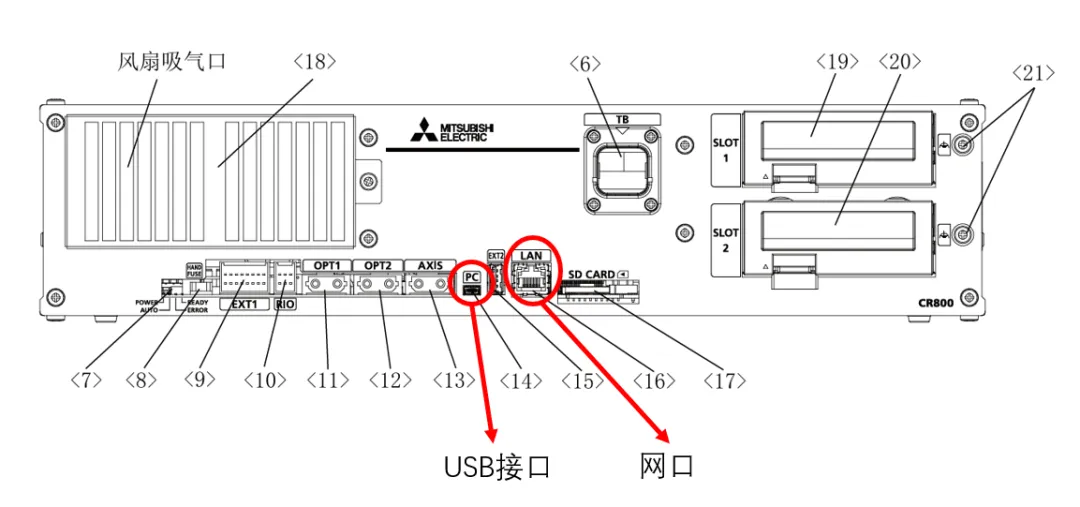
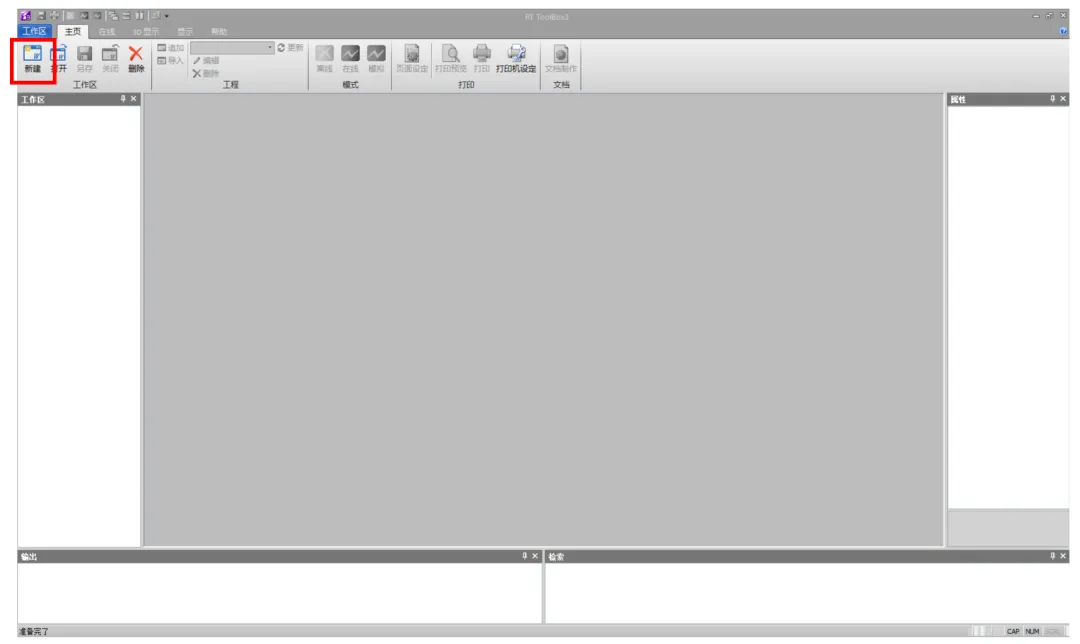
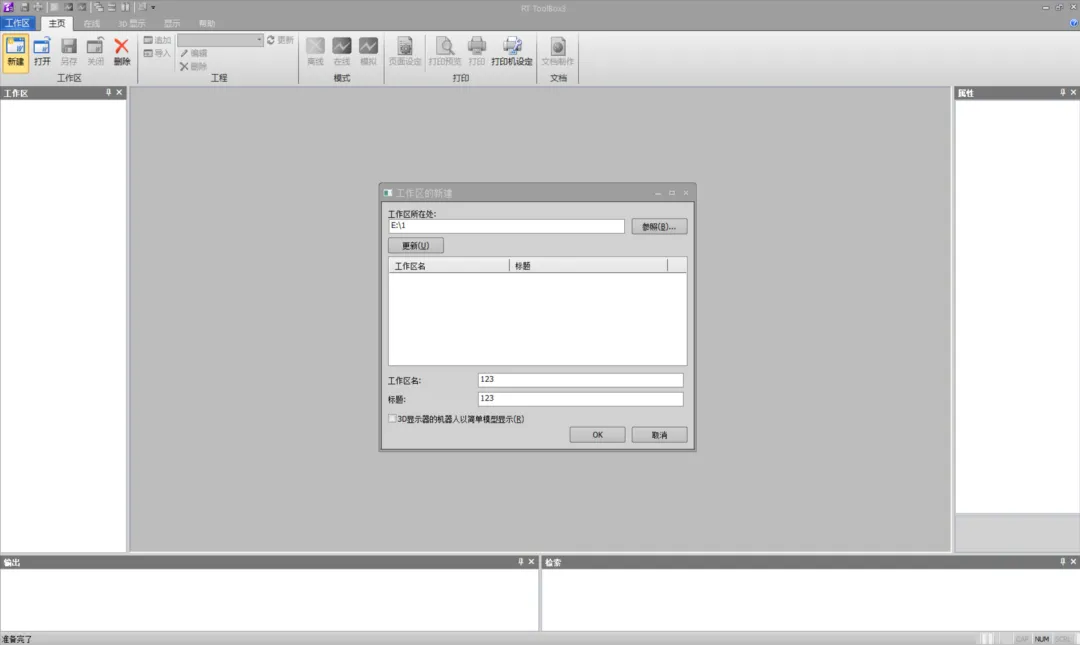
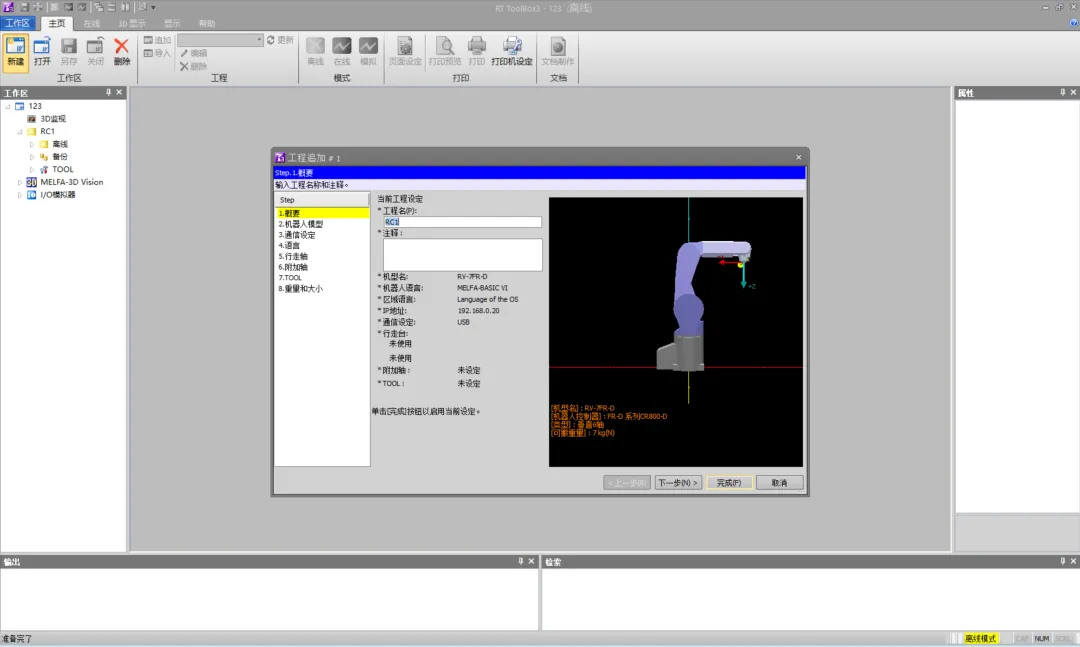
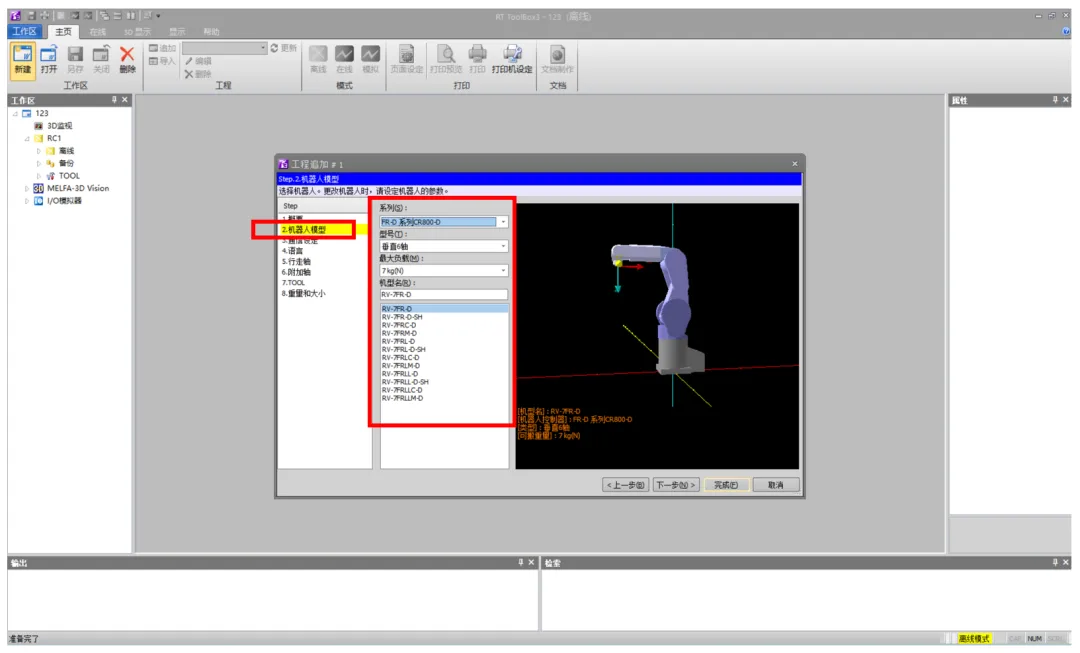
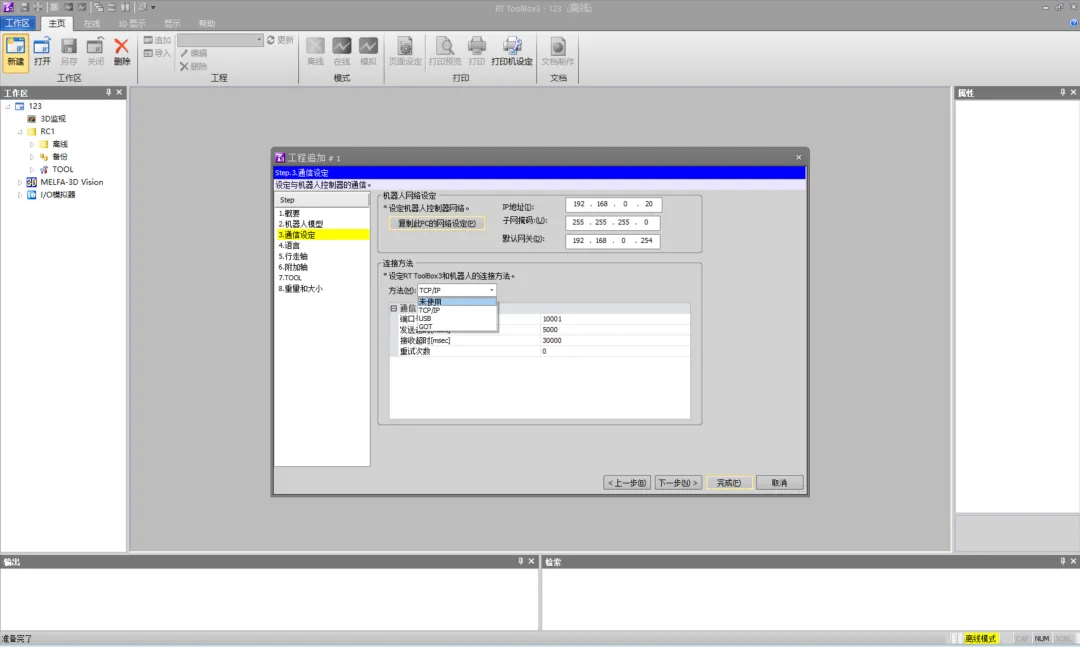
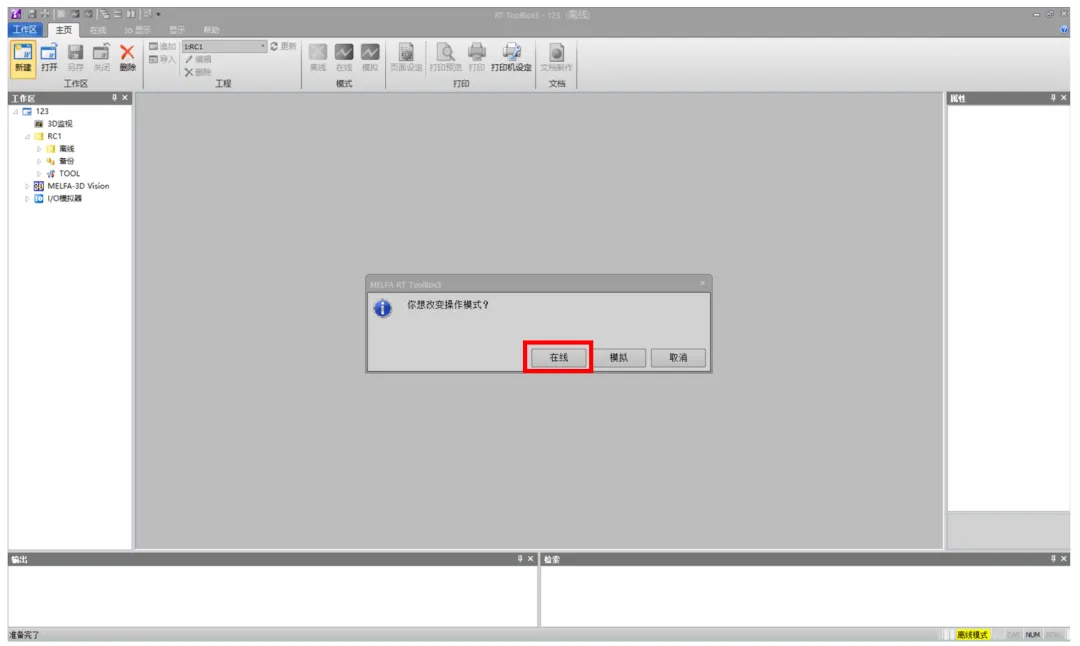
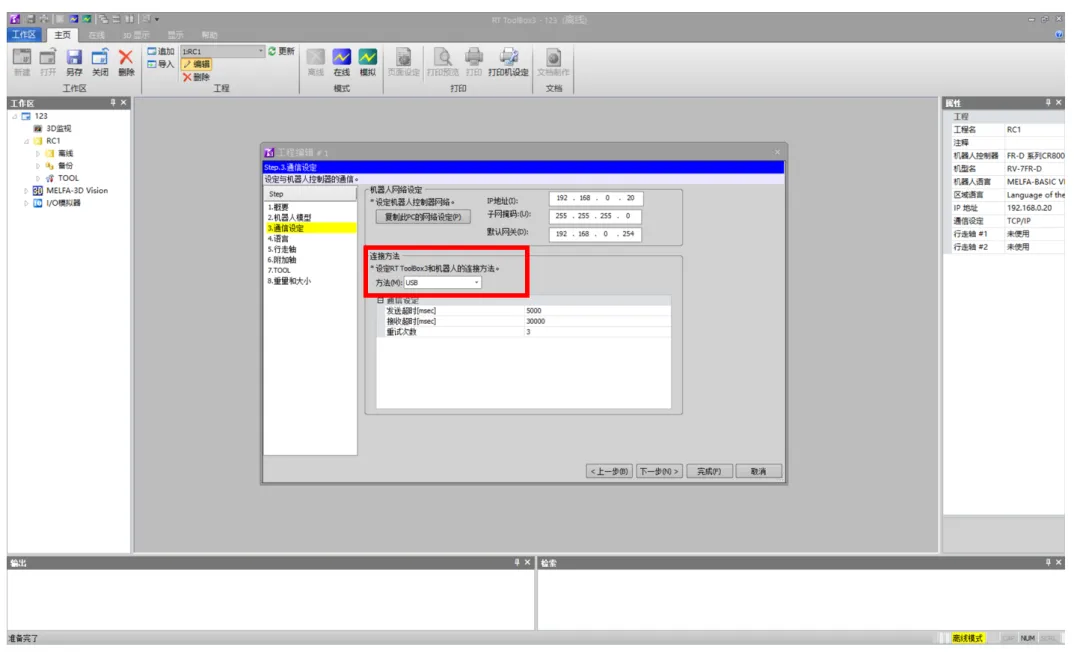
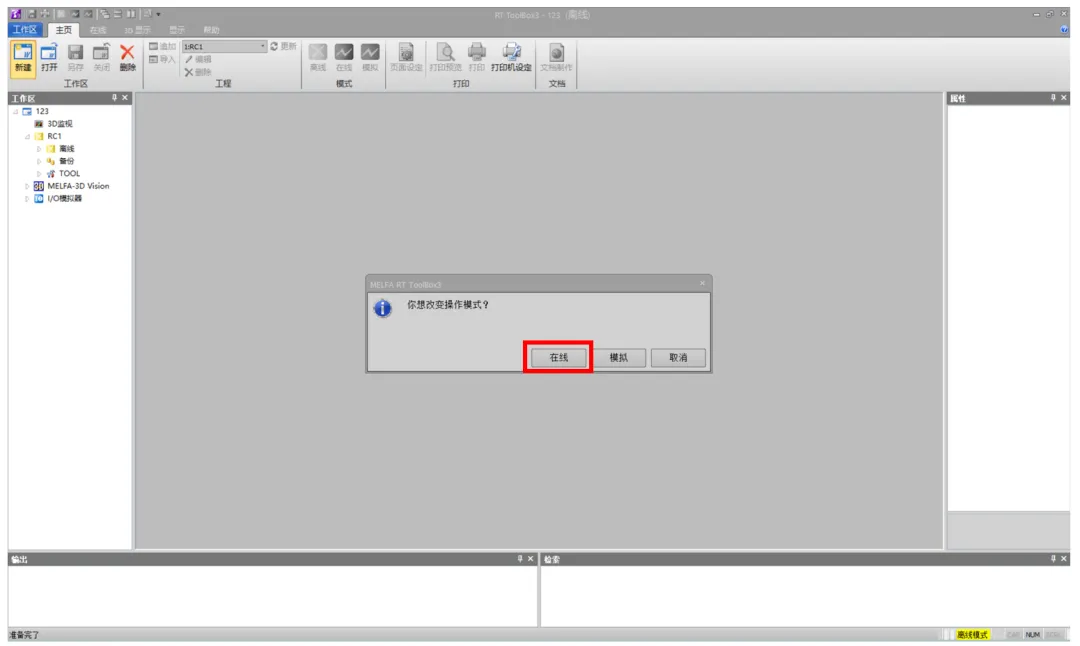
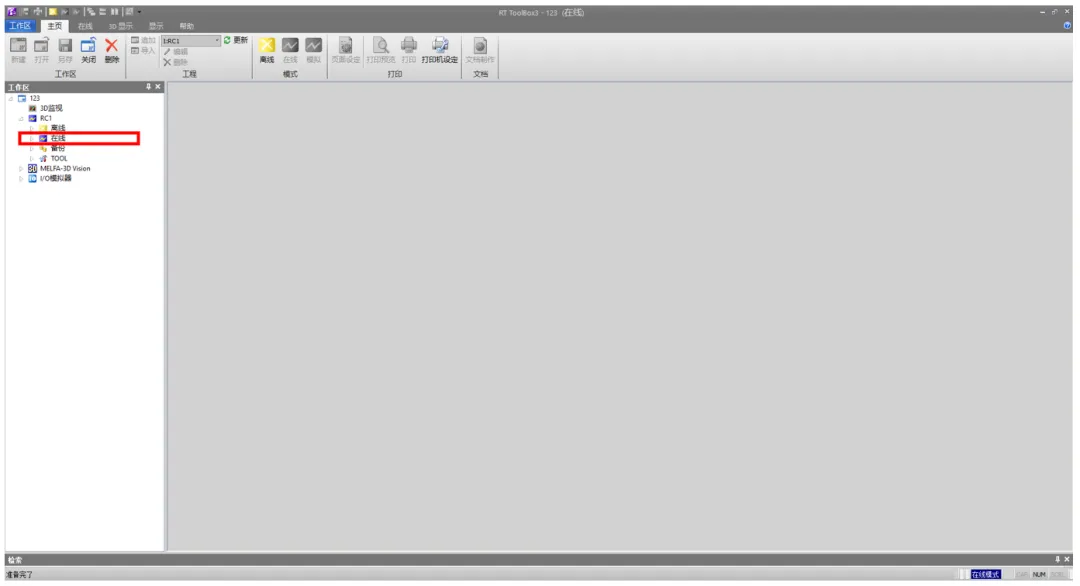
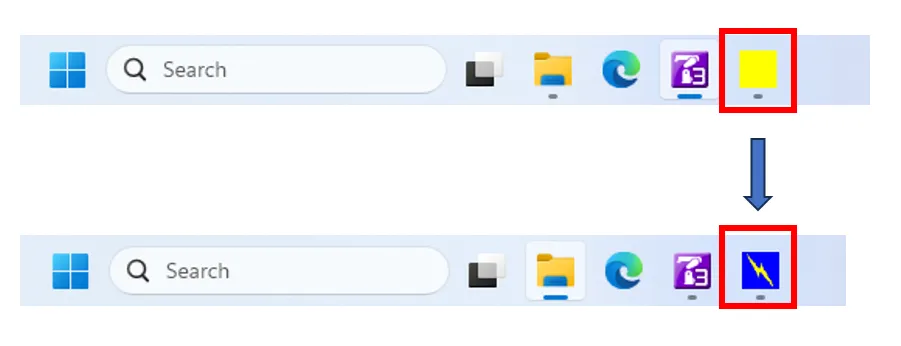
手把手教你用RT ToolBox3软件连接三菱Robot硬件准备:装有RT ToolBox3软件的电脑、一台三菱Robot(控制器CR800)通过软件连接三菱Robot有三种方式:1.TCP/IP 2.USB 3.GOT通常情况下用TCP/IP或USB的方式连接一.电脑IP设置与新建工作区1.设置电脑IP,通过TCP/IP的方式与手臂控制连接时,电脑IP需要与手臂控制器IP在同一网段,手臂控制器出厂时默认IP是192.168.0.20,这里电脑的IP暂时设置为192.168.0.100,在同一网段即可2.新建工作区①RT ToolBox3软件,新建一个工作区,给工作区和标题命名二.配置当前工程参数1.选择对应机型的机器人2.通讯设定选择TCP/IP连接或者USB连接其中一种即可①TCP/IP连接连接方式选择TCP/IP,无需修改IP,出厂时手臂默认IP是192.168.0.20,通讯设定后的语言,行走轴,附加轴,Tool,重量和大小暂时都可以使用默认,点击右下角“完成”按钮后会弹出一个操作模式选择弹窗,点击“在线”即可与ROBOT连接上②通过USB的方式连接通常情况下都是通过TCP/IP的方式连接,但是当手臂控制器的IP被修改或者端口号被占用时,这时候不知道控制器的IP,就需要通过USB的方式连接。连接方式选择USB,通讯设定后的语言,行走轴,附加轴,Tool,重量和大小暂时都可以使用默认,设定完成后点击右下角“完成”按钮后会弹出一个操作模式选择弹窗,点击“在线”即可与ROTOT连接上3.如何确认连上手臂①通讯连接上后,在界面的左侧会多出“在线”的功能按钮②同时,任务栏中连接状态图标会由黄色变成紫色通过以上步骤即可通过手臂软件连上手臂控制器
 夜雨聆风
夜雨聆风