 夜雨聆风
夜雨聆风AI日报 2026-06-13
2026年6月13日 | 聚焦 AI Coding 与具身智能
智源大会发布“悟界”5款基座大模型:AI 从“预测下一个词元”迈向“预测下一个物理状态”

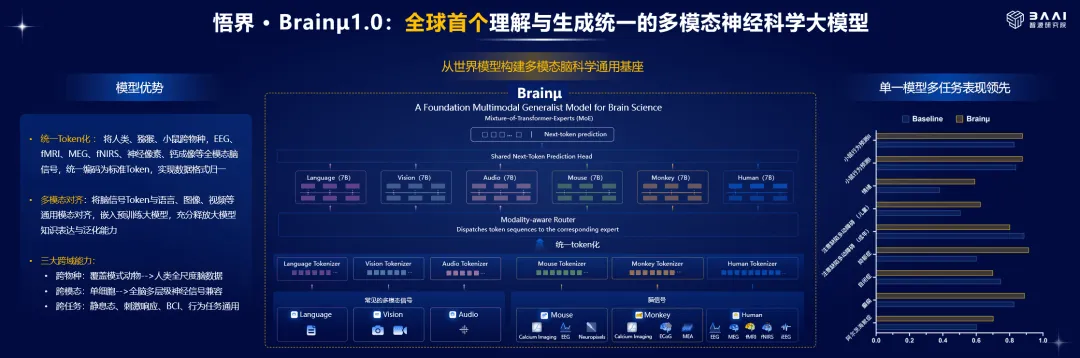
6 月 12 日,第八届北京智源大会在中关村国际创新中心开幕,智源研究院院长王仲远发布“悟界”系列 5 款基座大模型:Emu3.5(多模态统一,登 Nature)、Brainµ 1.0(神经科学,登 Science)、OpenComplex 2.5(药物发现)、Physis-v0.1(全球首个通用世界基座模型)以及 RoboBrain Orca 具身大脑。同期升级 FlagOS 2.1,支持 18 家芯片厂商 32 款芯片、算子超 600 个,生态成员超 80 家,并发布 4 款自研垂直智能体。
💡 值得关注的理由:从“悟道”到“悟界”,智源完成了一次范式跃迁:把 AI 的目标函数从“下一个 Token”换成“下一个物理状态”。这意味着大模型不再只在语言空间里内卷,而是开始具备理解真实物理世界的能力。Physis-v0.1 是全球首个“世界基座模型”,RoboBrain Orca 专为具身智能设计——这是中国 AI 首次在“物理 AI”领域定义新范式。
Kimi K2.7-Code 正式开源:1.1T 参数 MoE,国产编程模型登顶 HuggingFace
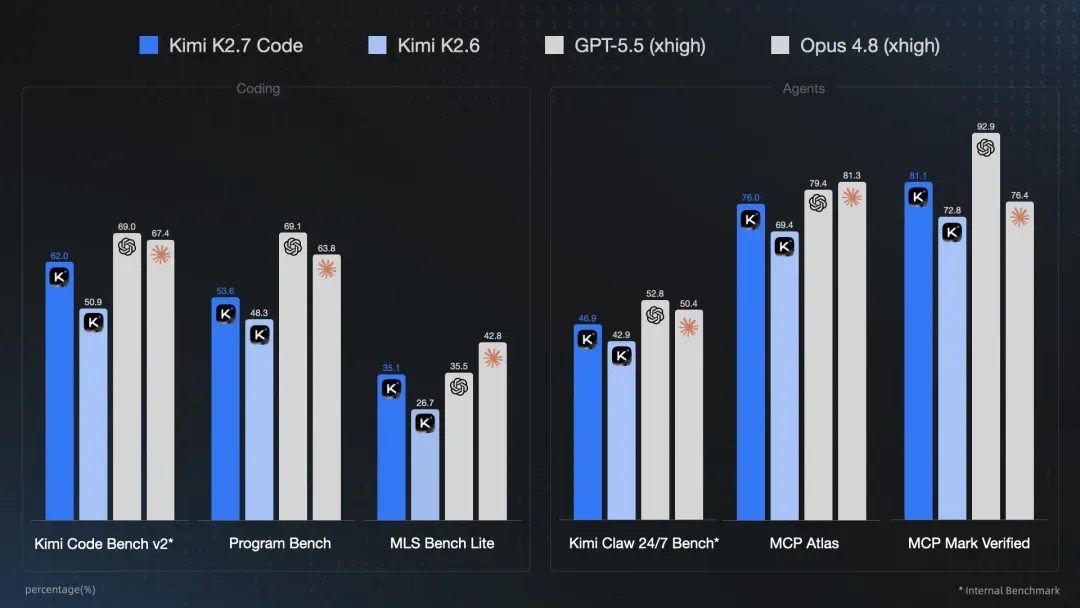
6 月 12 日,月之暗面发布并开源 Kimi K2.7-Code 编程大模型:1.1T 总参数 MoE 架构,推理时激活 32B,支持 256K 长上下文,配套 400M 参数 MoonViT 视觉编码器。在 HuggingFace 开源代码模型榜单上登顶,Kimi Code Bench v2 提升 21.8%、24/7 智能体自主执行基准提升约 10%,平均 token 消耗降低 30%。标准版输出 180 token/s,高速版提速 5–6 倍,将于 6 月 15 日上线。
💡 值得关注的理由:K2.7-Code 是国产开源编程模型第一次在 HuggingFace 上同时压过 Qwen、GLM、DeepSeek 系列。256K 上下文 + 1.1T 总参数 + 5–6 倍高速版,让中小团队用极低成本获得接近 GPT-5.5/Claude Opus 4.8 的代码 Agent 能力。30% 的 token 消耗下降,对做长上下文 Agent 产品的团队意义重大——成本直降,能力反升。
华为 HDC 2026 开幕:HarmonyOS 7 + 智能体框架 2.0 正式发布,鸿蒙进入 Agent 时代

6 月 12–14 日,华为开发者大会 HDC 2026 在东莞松山湖举办,正式发布 HarmonyOS 7 Developer Beta。鸿蒙智能体框架升级到 2.0,复杂任务处理成功率提升至 90%+,开放 20+ 项系统级 AI 能力,首次向开发者提供 GUI 操控权限;小艺接入 2000+ 鸿蒙智能体、500+ Skill、2100+ 系统能力。盘古 openPangu 2.0 开源推出。方舟引擎首次用大模型做性能优化,整体性能提升 15%。
💡 值得关注的理由:HarmonyOS 7 不只是版本号迭代,而是把“系统能力 Skill 化”做实了。智能体框架 2.0 配合盘古大模型 2.0 + GUI 操控权限,意味着开发者可以基于 6600 万台鸿蒙终端直接落地 Agent 应用——这是中国首个原生支持 Agent 编程范式的操作系统。对 AI Coding 创业者而言,鸿蒙是绕过 Android 生态封锁的独立赛道。
智源 SpikePingPong 跨本体机器人乒乓球对打:全球首个跨本体全自主系统
智源大会体验区,智源研究院 × 北京大学联合展示 SpikePingPong 系统:全球首个跨本体的人形机器人全自主乒乓球对打系统,可适配智元灵犀 X2、远征 A3、宇树 G1 等多类异构机器人。同期演示的酒店全场景清洁机器人基于 RoboBrainX 通用模型 + RoboClaw 交互系统 + 星源智 N5 算力平台实现端侧长程柔性操作,摆脱对云端网络依赖。
💡 值得关注的理由:“跨本体”三字是真正的突破。传统机器人演示只能跑在自家硬件上,而 SpikePingPong 让同一套算法在智元、宇树、远征三种完全不同的机器人上同时开打。这意味着具身智能的“算法-硬件”解耦正在发生,就像当年 Android 之于手机。酒店清洁机器人则展示了具身 AI 落地的真实场景:长程 + 柔性物体 + 端侧推理。
跨维智能 Dexterity-BEV:把自动驾驶的“鸟瞰图”范式搬进具身智能,3D 视觉基建新标准
具身大脑公司跨维智能推出 Dexterity-BEV,把自动驾驶领域成熟的 BEV(Bird's Eye View)范式引入具身智能数据基建:把多视角 RGB 图像、机器人状态、目标动作统一对齐到三维空间,2D 视觉编码器升级为带顶点图、顶点谱的 3D 坐标编码。在跨视角、跨基座、跨场景扰动测试下,传统 2D VLA 模型成功率显著下滑,Dexterity-BEV 保持稳定。
💡 值得关注的理由:具身智能过去两年卡在“数据基建”这一步——堆数据多但数据秩序混乱。Dexterity-BEV 把自动驾驶 5 年走通的 BEV 范式搬过来,相当于给机器人装上了“空间秩序引擎”。对创业团队而言,跨视角、跨基座、跨场景的稳定性是真正能上产线的指标,而不是论文里的 Demo 成功率。
本文由 AI 自动生成,仅供资讯参考 公众号:AI星图
