 夜雨聆风
夜雨聆风这篇先不从 AI Assistant 聊起。
我更想从 Esri 官方教程里的一个小项目说起:89 张无人机照片,拍的是一个住宅施工现场。任务也不复杂,把原始照片导进 Drone2Map,做出 True Ortho,用地面控制点提高精度,算一个料堆体积,最后发布成 Web Map 给组织里的人看。
这条链路听起来很顺,但里面每一步都可能卡人。
照片有 Lat、Long、Alt,不等于成果有精度。
控制点导进来了,不等于你知道哪些点该当 GCP,哪些点该留作 CP。
正射图看起来清楚,不等于 processing report 里的 RMSE 和 reprojection error 能过关。
成果能导出 TIF,也不等于甲方能在浏览器里顺手打开。到了 Web Map 这一步,COG、MRF、CRF 这些格式选择,反而会决定成果是不是能进入协作流程。
所以我看 Esri Drone2Map AI Assistant,不太关心它能不能说几句漂亮话。我更关心它能不能把这条从 89 张照片到 Web Map 的生产链讲清楚:哪里该提醒坐标系,哪里该分清 GCP/CP,哪里该看 RMSE,哪里该换成 COG。
如果这些硬门槛讲不清楚,Assistant 就只是一个文档搜索框。讲清楚了,它才可能变成无人机测绘生产里的第二个脑子。

第一坑:项目模板不是入口按钮,是交付合同的影子
这个 89 张照片的工地案例,最适合拿来拆 Drone2Map Assistant 的真实价值。
你是无人机操作员,刚拍完一个住宅施工现场,经理要你把原始无人机影像做成高精度 True Ortho,用地面控制点提高精度,再测一个料堆体积,最后把成果发布到 Web 上给组织里的人看。
这不是一个“打开软件看看照片”的任务。
它的交付物至少有三类:True Ortho、测量结果、Web 共享成果。中间还夹着坐标系、控制点、处理报告、测量单位这些东西。
所以第一步选 processing template,其实就已经在决定项目路线了。
Drone2Map 里有 2D Products、3D Products 这类模板。2D Products 可以做 True Ortho、DSM,也能处理多光谱和热红外影像。3D Products 更适合三维模型、点云、巡检场景。
这里的坑是:很多人把模板当成“先随便选一个再说”的入口按钮。其实模板更像交付合同的影子。你选 2D,不是因为 2D 听起来简单,而是因为这个项目真正要的是正射、表面模型、体积测量和地图发布。你选 3D,也不是因为三维更高级,而是因为你需要在三维场景里检查塔架、桥梁、立面或设备缺陷。
这时候 Assistant 如果只是回答“Drone2Map 有哪些模板”,价值不大。
它真正应该帮的是把一句项目话翻译成产品路线:
“我飞了一个工地,要算料堆体积,还要给项目经理网页查看,需要选什么模板,生成哪些产品,哪些可以先关掉?”
这才是对话式生产的第一步:不是替你点按钮,而是先帮你别走错生产线。
第二坑:照片有经纬度,不等于成果有精度
官方教程里有个细节很值得单独拎出来:这 89 张无人机影像,每张都带 Lat、Long、Alt,也就是纬度、经度和高度。大多数无人机确实会把这些信息写进照片 metadata,所以影像一导进 Drone2Map,就能落到地图上。
但这只说明软件知道照片大概在哪,不说明最终成果就准确。
Drone2Map 默认把很多无人机影像按 WGS 1984 水平坐标系和 EGM96 垂直坐标系处理。官方教程也提醒:很多没有 RTK / PPK 的普通无人机,高程 GPS 数据可能不稳定,垂直方向误差有时能到 100 米量级。
这个细节比“AI Assistant 很聪明”重要多了。
因为无人机测绘最怕的不是看起来错,而是看起来很漂亮但位置不准。正射很清楚,料堆边缘也能画,DSM 起伏也有,但如果高程基准没对,后面土方量、坡度、积水分析都可能跟着偏。
所以第二个实操判断是:
只靠照片 metadata 的项目,可以有不错的相对精度;但只要你要交付位置、高程、体积或验收成果,就不能把控制点当成可有可无的装饰。
Assistant 在这里最有用的提示,不应该是“什么是 GCP”,而应该更直接:
“我这批照片没有 RTK / PPK,只想算体积,必须加 GCP 吗?如果只做内部预览,可以接受什么风险?”
这种问题才是项目现场会问的。
第三坑:GCP 和 CP 不是两个缩写,是两种责任
地面控制点这一块,最容易被写成术语科普。但项目里真正要分清的是责任。
GCP,Ground Control Point,是拿来参与处理、提高水平和垂直精度的。CP,Check Point,是拿来检查最终产品精度的。简单说,GCP 是“帮你把成果拉准”,CP 是“拿来考你到底准不准”。
官方 2D 教程里,控制点一开始导入后默认是 GCP,后面会把 5 个 GCP 改成 CP,用来检查最终影像产品的整体准确性。这个动作很小,但很关键。
如果你把所有点都拿去参与校正,最后再拿同一批点说“你看我很准”,这个验收逻辑是虚的。就像考试前把答案塞进模型,再拿同一张卷子证明模型会做题。
Drone2Map 2026.1 在 ground control 上也有具体更新:auto link detection 提速超过 30%;导入地理坐标系控制点时,可以指定任意项目坐标系,而不是自动默认到最近的 UTM zone。如果需要转换,也可以在同一步处理。
这不是一个好看的功能点,而是很实在的工程减阻。
因为控制点导入最烦的地方,往往不是“点能不能进软件”,而是它们用的水平坐标系、垂直坐标系、单位和项目坐标系能不能统一。官方教程里甚至给了具体例子:控制点用 NAD 1983 StatePlane Texas S Central FIPS 4204 (US Feet),垂直坐标系也要单独设。换到国内项目,类似问题就是 CGCS2000、地方坐标、85 高程、独立坐标系、米和英尺这种细节。
Assistant 如果能在这个地方帮人少翻文档,价值就很直接:
“我导入的控制点是地理坐标,项目成果要用地方投影坐标,Drone2Map 会不会默认帮我选 UTM?我需要在哪里确认水平和垂直基准?”
注意,这不是让 AI 替你决定坐标系。
坐标系必须由项目要求决定。Assistant 能帮的是把容易藏在窗口里的设置拎出来,让你知道哪里必须检查。
第四坑:Rapid、High、Ultra 不是档位鄙视链
很多软件参数看起来像画质档位,实际是项目策略。
Drone2Map 的 processing options 里,Point Cloud Density 有 Rapid、High、Ultra。Ultra 细节最高,处理时间也更长;High 是多数项目推荐设置;Rapid 密度最低,适合快速项目或测试。
如果只是内部看一下今天航线有没有漏,Rapid 很可能比 Ultra 更合理。灾害响应、应急检查、施工阶段管理这类时间敏感项目,也不一定需要一上来就把所有产品跑到最细。先跑出一个可判断的 True Ortho 和 DSM,确认范围、遮挡、变形、明显问题,再决定要不要高质量重跑,这反而更像真实工作流。
但如果你要交最终验收成果,或者要从 DSM/DTM 里做细致量测,Rapid 就不能被当成省时间的万能钥匙。
这就引出 Assistant 可以帮的一类问题:
“我现在只是想快速检查飞行质量和覆盖范围,能不能用 Rapid?如果后面要交土方量报告,哪些设置必须重新跑?”
这类问题比“请介绍一下 Rapid point cloud density”有用得多。
还有一个更容易被忽略的硬约束:Drone2Map 的处理选项里会显示 CPU 线程、CUDA Compute Version 和 GPU VRAM。官方文档写到,CUDA computation 会用于 automated ground control point detection 和 Gaussian splat products 等深度学习工作流;如果硬件不支持最低 CUDA compute version,相关信息不会出现。GPU VRAM 也不是摆设,深度学习工作流最低需要 8GB VRAM。
所以专业软件里的 AI,不是只问一句话就完事。它后面有硬件、显存、处理时间和产品精度的账。
这部分如果写成一句“AI 提升效率”,就太虚了。
第五坑:Challenging mode 不是万能修复键
Drone2Map 2026.1 里新增的 Challenging adjustment mode,我觉得比 Assistant 更值得很多测绘人看一眼。
官方说得比较清楚:Standard 适合中高对比度、有纹理、有人工特征、植被稀疏的影像;Challenging 适合低对比度、纹理少、人工特征少、密集植被或水体比例高的场景,但它更耗处理资源。
这正好对应很多无人机项目的老毛病。
飞建筑工地,地面有道路、材料、墙体、车辆,特征点通常比较多。飞大片水面、湿地、林地、农田,画面重复、纹理弱,软件更容易掉照片、匹配不稳、空三质量差。
所以 Challenging mode 不是“效果不好就点一下”的万能修复键,它更像是在告诉软件:这批照片的特征匹配环境比较难,你要用更重的方式处理。
这里的实操判断很简单:
如果你飞的是工地、厂区、道路、桥梁,先用 Standard,出问题再看报告和影像分布。
如果你飞的是林地、水体、农田、低纹理屋顶,或者已经出现大量 uncalibrated images,再考虑 Challenging。
但只要切 Challenging,就要接受时间成本。不要一边要求又快又稳,一边把所有项目都丢给重模式。
Assistant 能不能有用,就看它能不能把这种取舍说清楚,而不是只回答“Challenging mode 用于困难影像”。
第六坑:processing report 不是附件,是验收前的体检单
无人机测绘成果最容易骗人的是视觉效果。
正射图看起来很清楚,客户也觉得“挺像那么回事”,但这不代表成果质量过关。官方教程里专门有一步叫 review the processing report,而且说得很直接:生成产品的视觉外观不一定能反映数据质量,否则施工现场的测量结果可能就是错的。
报告里至少有几个东西要看:
项目处理范围和耗时。
Mean Ground Sampling Distance,也就是 True Ortho 的分辨率。
Quality Checks 里的 calibrated images 数量。
控制点位置的 RMSE。
reprojection error。官方教程里提到,reprojection error 的值应该小于 1。
Initial vs Adjusted Image Positions,也就是蓝点和绿点之间的偏移。如果偏移很明显,可能说明无人机采集时 GPS 精度有问题。即使后续处理把误差纠正了,你也应该知道这批数据一开始并不稳。
这些就是干活时真正要盯的东西。
Assistant 在这个环节如果只会生成一句“报告显示项目质量良好”,那我会很不放心。
它更应该像一个会翻报告的助手,帮你问出具体问题:
“这次有多少张照片没有校准?”
“控制点 RMSE 到底卡在哪个方向?”
“reprojection error 超过 1 的原因可能是什么?”
“初始位置和调整后位置偏移很大,我还能不能拿这个结果去算体积?”
当然,最后能不能交付,不能由 Assistant 拍板。它可以帮你定位风险,但签字的人还是人。
第七坑:成果发布不是“导出一下”,而是给下一环节减负
Drone2Map 2026.1 的输出更新也很实际。
Merged TIF 产品现在可以默认生成 Cloud Optimized GeoTIFF,也就是 COG。COG 通过内部切片和 overviews 来改善云端访问。True Ortho、DSM、DTM、Shaded Relief 也增加了 MRF 和 CRF 两种输出格式,面向云存储和 Web 制图性能,尤其适合很大的数据集。
这件事对普通读者可能没那么性感,但对 GIS 项目很重要。
因为很多无人机成果不是在 Drone2Map 里看完就结束,它要进入 Web Map、ArcGIS Online、ArcGIS Enterprise,甚至还要给别的部门、甲方、施工方、巡检人员看。
如果你只是把一个巨大的 TIF 丢过去,后面的人打开慢、加载卡、无法在线查看,问题并不在“测绘成果有没有生成”,而在“成果有没有进入协作流程”。
2026.1 还支持把项目分享为 Oriented Imagery Layer。它可以和 3D Mesh 或 Gaussian Splat 图层放在 Web Scene 里,形成更适合三维巡检的工作空间。比如塔架巡检里,不只是看一张模型,还能从三维位置反查对应影像,定位某个风管、探照灯、外立面缺陷。
这也是为什么我觉得 Drone2Map Assistant 的价值,不该只看聊天框。
它如果能在发布阶段帮用户问清楚:
“这个成果是给内部 GIS 工程师二次处理,还是给甲方网页查看?”
“要长期放在云上访问,用 TIF、COG、MRF、CRF 哪个更合适?”
“这是正射量测成果,还是巡检影像成果,应该发布 Web Map、Tile Layer,还是 Oriented Imagery Layer?”
那它才是真正嵌进生产链了。
回到标题:89 张照片到 Web Map,中间真正硬的是这几关
写到这里,我对 Drone2Map Assistant 的判断反而变得比较具体。
它不是无人机测绘的自动驾驶。
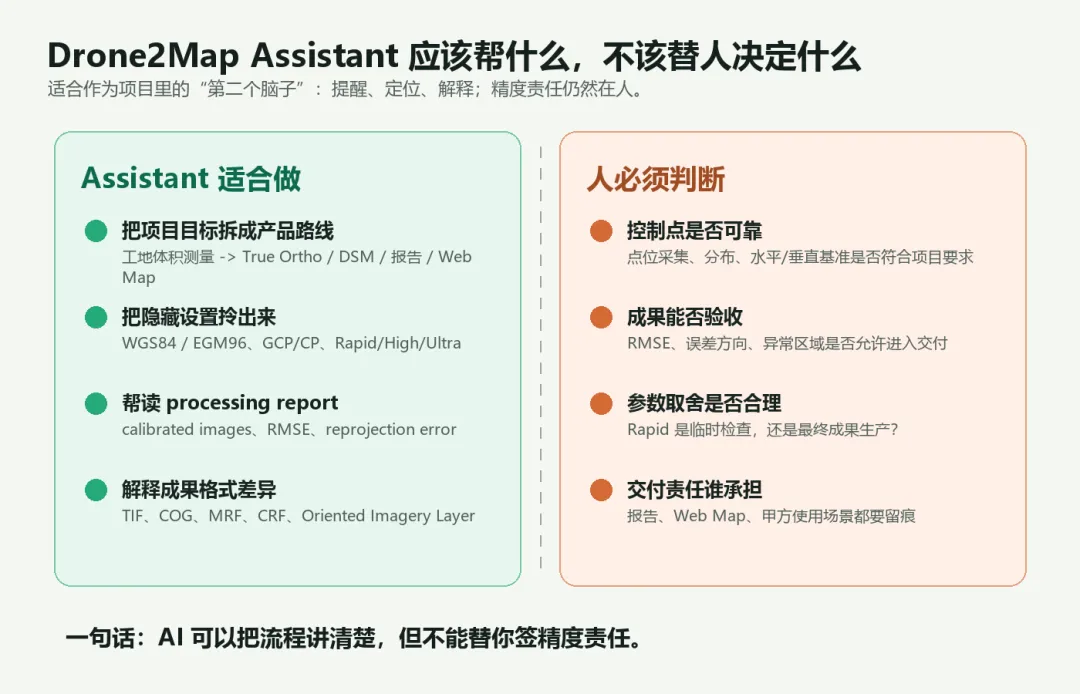
它更像一个项目里的“第二个脑子”,但这个脑子不能替你负责,只能帮你减少遗漏。
第一,它应该把 89 张照片背后的项目目标翻译成产品路线。
比如“工地算土方量”,对应 2D Products、True Ortho、DSM、控制点、processing report、体积测量、报告和 Web Map。不是所有产品都要开,也不是所有参数都要最高。
第二,它应该把 GCP/CP、RMSE 这类隐藏验收参数翻译成风险提示。
比如 WGS84 / EGM96、项目坐标系、控制点坐标系、GCP/CP、Rapid/High/Ultra、Standard/Challenging、RMSE、reprojection error。这些东西不应该只躺在文档里等用户翻。
第三,它应该把 COG、MRF、CRF 和 Web Map 这些成果格式翻译成下游用法。
比如 TIF 适合什么,COG 为什么适合云端访问,MRF/CRF 为什么对大数据集和 Web 制图更友好,Oriented Imagery Layer 适合什么巡检场景。
如果 Assistant 只能回答“这个按钮在哪里”,那它只是一个文档搜索框。
如果它能把“我今天飞了一个工地,老板要明天看体积和正射”拆成一条可检查的生产线,它才开始有点意思。
我会怎么用它,而不是怎么吹它
如果我真的拿 Drone2Map Assistant 跑一个项目,我不会一上来问“帮我完成无人机测绘”。
我会把问题问得很土:
“我有 89 张工地照片,没有 RTK,经理要算料堆体积,我应该先选哪些产品?哪些结果不能直接相信?”
“我导入了控制点,哪些点应该设成 GCP,哪些点应该留作 CP?如果我把所有点都设成 GCP,会有什么验收风险?”
“我只想今天先看覆盖范围和明显问题,用 Rapid 可以吗?最终交付时哪些选项要重跑?”
“processing report 里 calibrated images、RMSE、reprojection error、initial vs adjusted positions 分别该怎么看?”
“我要给甲方网页查看正射成果,不想让他下载大 TIF,COG、MRF、CRF、Web Map 哪个更合适?”
这些问题的共同点是:它们不把 AI 当神,也不把人当按钮工。
AI 负责把复杂软件和文档变成可追问的上下文;人负责判断项目要求、精度责任和最终交付。
这才是我觉得 Drone2Map 2026.1 Assistant 值得写的原因。
它不是一个炫技入口,而是提醒我们:低空经济最后不会只落在飞行许可、航线平台和监管大屏上。它会落在这些很细的生产问题里:照片怎么导、控制点怎么用、报告怎么看、成果怎么发、责任怎么留痕。
真正有用的空间智能,不是让人少学专业知识,而是让人在关键步骤少漏一个检查项。
如果你做过无人机测绘、倾斜摄影或外业巡检,最卡的是模板选择、控制点、坐标系、空三失败、processing report、DSM/正射质量、体积测量,还是成果发布?留言写一个真实卡点和你用的软件,我后面挑一个具体问题继续拆。

参考资料
Esri ArcGIS Blog: The ArcGIS Drone2Map 2026.1 assistant: Stop hunting for answers, start building products Esri ArcGIS Blog: What’s new in ArcGIS Drone2Map 2026.1 Esri Documentation: What’s new in ArcGIS Drone2Map 2026.1 Esri Documentation: Processing options in ArcGIS Drone2Map Esri Learn: Create 2D products with ArcGIS Drone2Map Esri Learn: Inspect infrastructure with ArcGIS Drone2Map
以上,既然看到这里了,如果觉得不错,随手点个赞、在看、转发三连吧,如果想第一时间收到推送,也可以给我个星标⭐~谢谢你看我的文章,我们,下次再见。
