文档内容
2025 年 6 月浙江省普通高校招生选考通用技术真题
一、选择题
1.随着我国跨入智能电网时代,电力供应稳定可靠,处于世界领先地位。下列关于智能电网技术的说法中,不恰
..
当的是( )
.
A.在发电、输电、用电等环节得到了广泛应用,体现了技术的综合性
B.实现了对电力系统的实时监测和智能化管理,体现了技术的目的性
C.实现了偏远地区稳定的电力供应,改善了当地居民的生活
D.产生了大量信息技术与电力网络相融合的知识产权,体现了技术的专利性
【答案】A
【详解】A项:在发电、用电、输电等环节得到广泛使用,体现了技术的综合性,说法错误,技术的综合性是指技
术综合运用多门学科的知识,而非是使用广泛,说法不合理,故BCD正确、合理,
故选A。
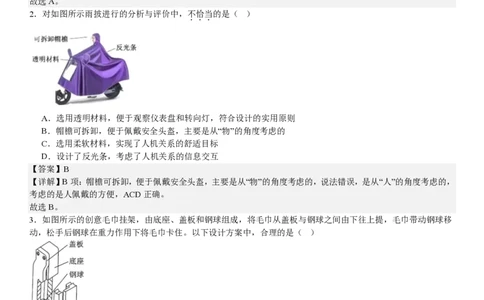
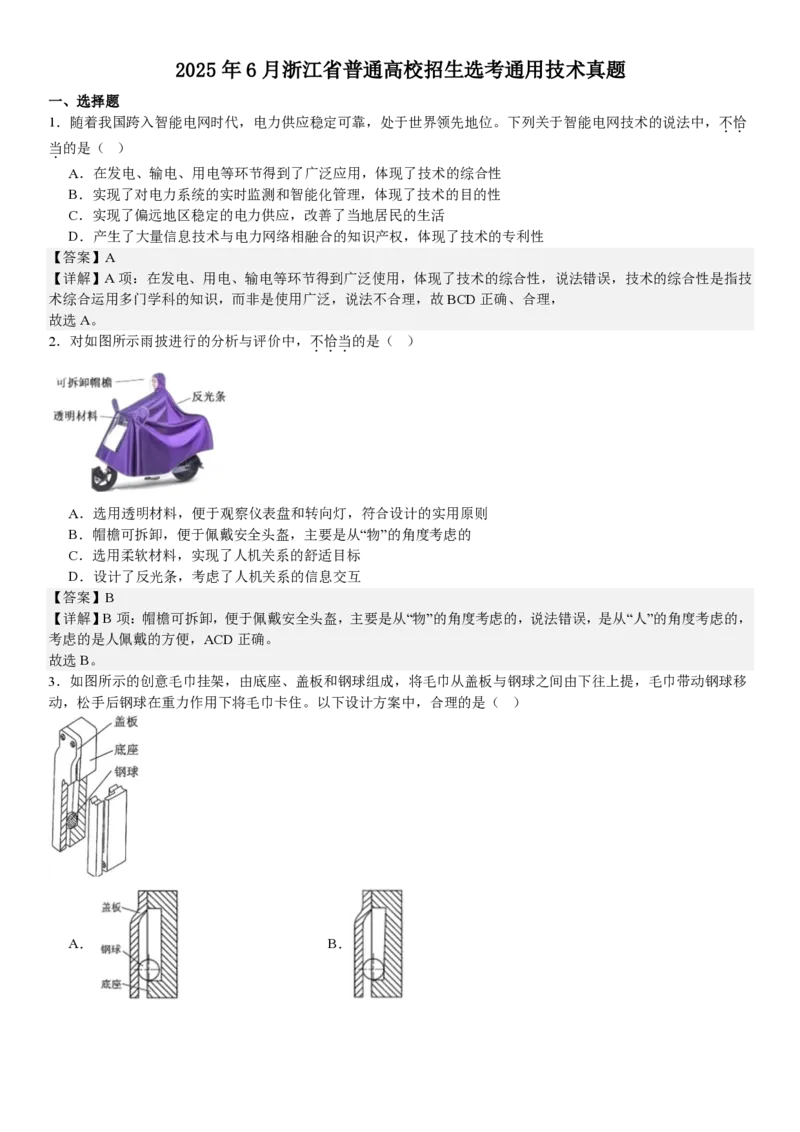
2.对如图所示雨披进行的分析与评价中,不恰当的是( )
...
A.选用透明材料,便于观察仪表盘和转向灯,符合设计的实用原则
B.帽檐可拆卸,便于佩戴安全头盔,主要是从“物”的角度考虑的
C.选用柔软材料,实现了人机关系的舒适目标
D.设计了反光条,考虑了人机关系的信息交互
【答案】B
【详解】B项:帽檐可拆卸,便于佩戴安全头盔,主要是从“物”的角度考虑的,说法错误,是从“人”的角度考虑的,
考虑的是人佩戴的方便,ACD正确。
故选B。
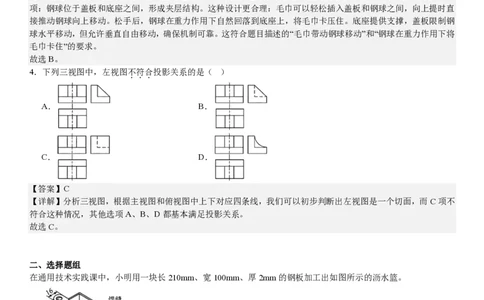
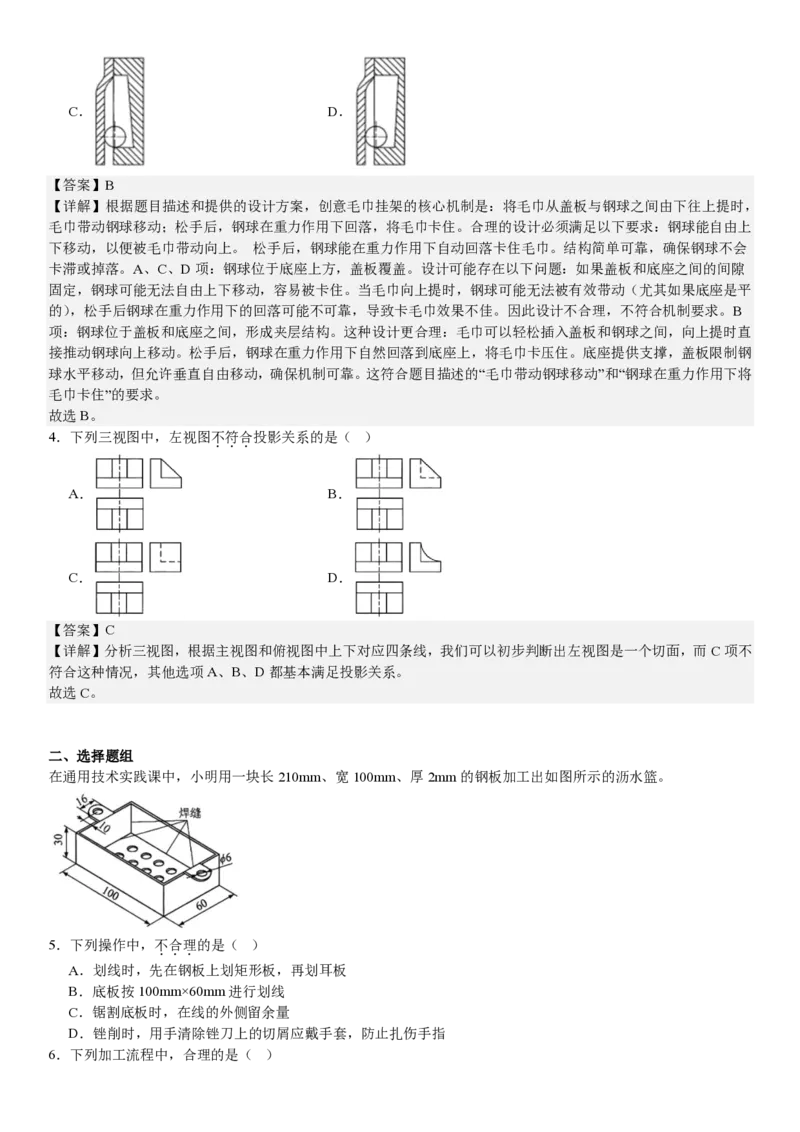
3.如图所示的创意毛巾挂架,由底座、盖板和钢球组成,将毛巾从盖板与钢球之间由下往上提,毛巾带动钢球移
动,松手后钢球在重力作用下将毛巾卡住。以下设计方案中,合理的是( )
A. B.C. D.
【答案】B
【详解】根据题目描述和提供的设计方案,创意毛巾挂架的核心机制是:将毛巾从盖板与钢球之间由下往上提时,
毛巾带动钢球移动;松手后,钢球在重力作用下回落,将毛巾卡住。合理的设计必须满足以下要求:钢球能自由上
下移动,以便被毛巾带动向上。 松手后,钢球能在重力作用下自动回落卡住毛巾。结构简单可靠,确保钢球不会
卡滞或掉落。A、C、D项:钢球位于底座上方,盖板覆盖。设计可能存在以下问题:如果盖板和底座之间的间隙
固定,钢球可能无法自由上下移动,容易被卡住。当毛巾向上提时,钢球可能无法被有效带动(尤其如果底座是平
的),松手后钢球在重力作用下的回落可能不可靠,导致卡毛巾效果不佳。因此设计不合理,不符合机制要求。B
项:钢球位于盖板和底座之间,形成夹层结构。这种设计更合理:毛巾可以轻松插入盖板和钢球之间,向上提时直
接推动钢球向上移动。松手后,钢球在重力作用下自然回落到底座上,将毛巾卡压住。底座提供支撑,盖板限制钢
球水平移动,但允许垂直自由移动,确保机制可靠。这符合题目描述的“毛巾带动钢球移动”和“钢球在重力作用下将
毛巾卡住”的要求。
故选B。
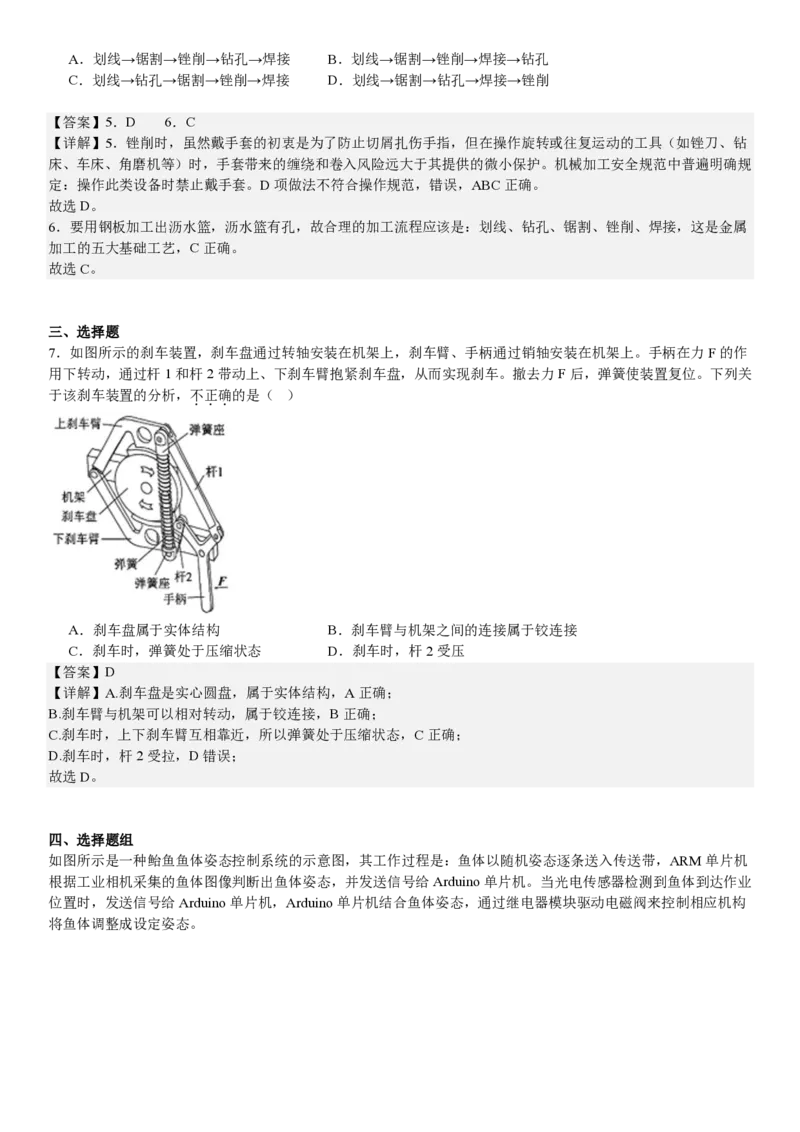
4.下列三视图中,左视图不符合投影关系的是( )
...
A. B.
C. D.
【答案】C
【详解】分析三视图,根据主视图和俯视图中上下对应四条线,我们可以初步判断出左视图是一个切面,而C项不
符合这种情况,其他选项A、B、D都基本满足投影关系。
故选C。
二、选择题组
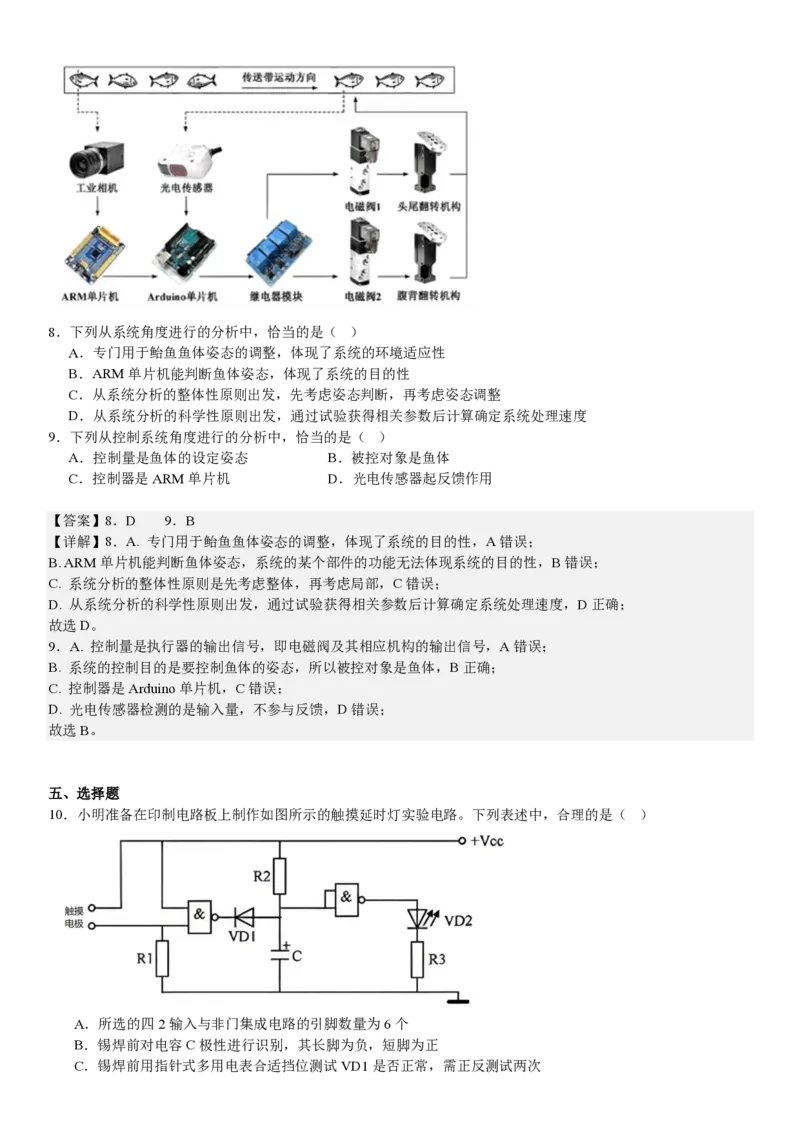
在通用技术实践课中,小明用一块长210mm、宽100mm、厚2mm的钢板加工出如图所示的沥水篮。
5.下列操作中,不合理的是( )
...
A.划线时,先在钢板上划矩形板,再划耳板
B.底板按100mm×60mm进行划线
C.锯割底板时,在线的外侧留余量
D.锉削时,用手清除锉刀上的切屑应戴手套,防止扎伤手指
6.下列加工流程中,合理的是( )A.划线→锯割→锉削→钻孔→焊接 B.划线→锯割→锉削→焊接→钻孔
C.划线→钻孔→锯割→锉削→焊接 D.划线→锯割→钻孔→焊接→锉削
【答案】5.D 6.C
【详解】5.锉削时,虽然戴手套的初衷是为了防止切屑扎伤手指,但在操作旋转或往复运动的工具(如锉刀、钻
床、车床、角磨机等)时,手套带来的缠绕和卷入风险远大于其提供的微小保护。机械加工安全规范中普遍明确规
定:操作此类设备时禁止戴手套。D项做法不符合操作规范,错误,ABC正确。
故选D。
6.要用钢板加工出沥水篮,沥水篮有孔,故合理的加工流程应该是:划线、钻孔、锯割、锉削、焊接,这是金属
加工的五大基础工艺,C正确。
故选C。
三、选择题
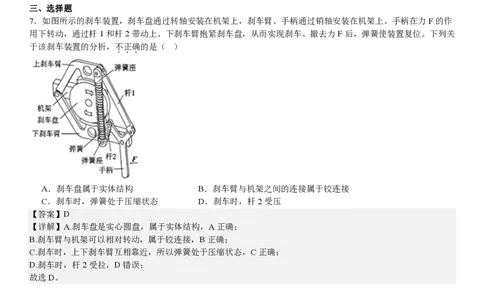
7.如图所示的刹车装置,刹车盘通过转轴安装在机架上,刹车臂、手柄通过销轴安装在机架上。手柄在力F的作
用下转动,通过杆1和杆2带动上、下刹车臂抱紧刹车盘,从而实现刹车。撤去力F后,弹簧使装置复位。下列关
于该刹车装置的分析,不正确的是( )
...
A.刹车盘属于实体结构 B.刹车臂与机架之间的连接属于铰连接
C.刹车时,弹簧处于压缩状态 D.刹车时,杆2受压
【答案】D
【详解】A.刹车盘是实心圆盘,属于实体结构,A正确;
B.刹车臂与机架可以相对转动,属于铰连接,B正确;
C.刹车时,上下刹车臂互相靠近,所以弹簧处于压缩状态,C正确;
D.刹车时,杆2受拉,D错误;
故选D。
四、选择题组
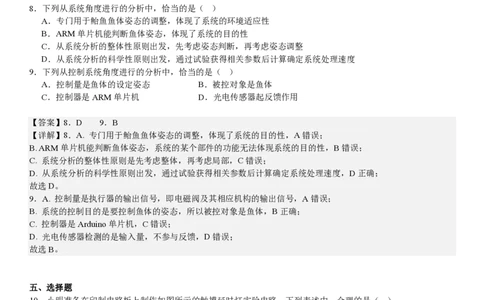
如图所示是一种鲐鱼鱼体姿态控制系统的示意图,其工作过程是:鱼体以随机姿态逐条送入传送带,ARM单片机
根据工业相机采集的鱼体图像判断出鱼体姿态,并发送信号给Arduino单片机。当光电传感器检测到鱼体到达作业
位置时,发送信号给Arduino单片机,Arduino单片机结合鱼体姿态,通过继电器模块驱动电磁阀来控制相应机构
将鱼体调整成设定姿态。8.下列从系统角度进行的分析中,恰当的是( )
A.专门用于鲐鱼鱼体姿态的调整,体现了系统的环境适应性
B.ARM单片机能判断鱼体姿态,体现了系统的目的性
C.从系统分析的整体性原则出发,先考虑姿态判断,再考虑姿态调整
D.从系统分析的科学性原则出发,通过试验获得相关参数后计算确定系统处理速度
9.下列从控制系统角度进行的分析中,恰当的是( )
A.控制量是鱼体的设定姿态 B.被控对象是鱼体
C.控制器是ARM单片机 D.光电传感器起反馈作用
【答案】8.D 9.B
【详解】8.A. 专门用于鲐鱼鱼体姿态的调整,体现了系统的目的性,A错误;
B. ARM单片机能判断鱼体姿态,系统的某个部件的功能无法体现系统的目的性,B错误;
C. 系统分析的整体性原则是先考虑整体,再考虑局部,C错误;
D. 从系统分析的科学性原则出发,通过试验获得相关参数后计算确定系统处理速度,D正确;
故选D。
9.A. 控制量是执行器的输出信号,即电磁阀及其相应机构的输出信号,A错误;
B. 系统的控制目的是要控制鱼体的姿态,所以被控对象是鱼体,B正确;
C. 控制器是Arduino单片机,C错误;
D. 光电传感器检测的是输入量,不参与反馈,D错误;
故选B。
五、选择题
10.小明准备在印制电路板上制作如图所示的触摸延时灯实验电路。下列表述中,合理的是( )
A.所选的四2输入与非门集成电路的引脚数量为6个
B.锡焊前对电容C极性进行识别,其长脚为负,短脚为正
C.锡焊前用指针式多用电表合适挡位测试VD1是否正常,需正反测试两次D.锡焊时先送入焊锡再加热焊盘和焊件,结束时先移走电烙铁再移走焊锡
【答案】C
【详解】A:四输入与非门集成电路通常采用DIP封装,引脚数为14个(例如74HC20为双4输入与非门,14引
脚)。6引脚封装常见于简单器件(如晶体管或运算放大器),不适用于多输入逻辑门IC。因此,此表述错误。
B:对于极性电容(如电解电容),长脚为正极(+),短脚为负极(-)。表述中“长脚为负,短脚为正”与标准相反,
可能导致电容反向安装损坏电路。正确做法:依据电容外壳的负极标记(如条纹或“-”号)和引脚长度综合判断。
C:符合电子元件检测规范,合理。
D:正确焊接顺序:先用电烙铁加热焊盘和焊件(约1-2秒),再送入焊锡丝使其熔化流动。先移走焊锡丝,再移走
电烙铁(确保焊点光滑,避免冷焊或拉尖)。“先送入焊锡再加热”会导致焊锡无法均匀润湿焊盘;“先移走电极板再
移走焊锡”可能使焊锡凝固过快,形成毛刺。错误。
故选C。
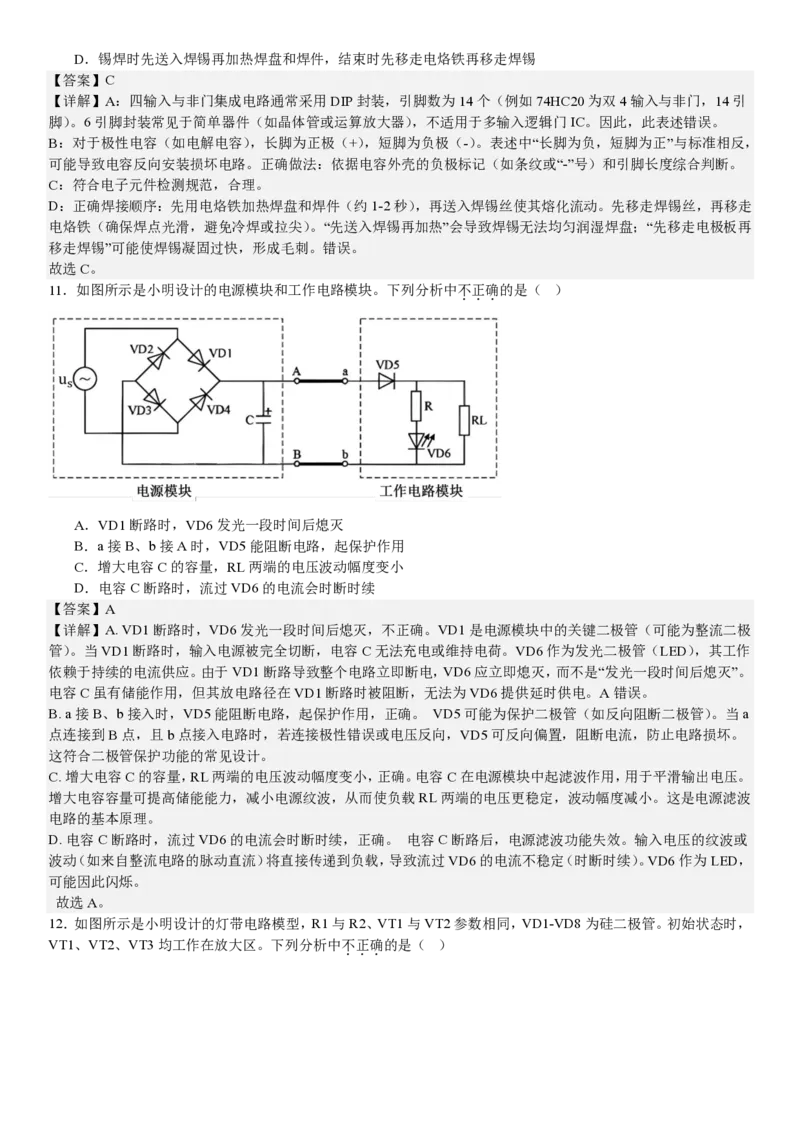
11.如图所示是小明设计的电源模块和工作电路模块。下列分析中不正确的是( )
...
A.VD1断路时,VD6发光一段时间后熄灭
B.a接B、b接A时,VD5能阻断电路,起保护作用
C.增大电容C的容量,RL两端的电压波动幅度变小
D.电容C断路时,流过VD6的电流会时断时续
【答案】A
【详解】A. VD1断路时,VD6发光一段时间后熄灭,不正确。VD1是电源模块中的关键二极管(可能为整流二极
管)。当VD1断路时,输入电源被完全切断,电容C无法充电或维持电荷。VD6作为发光二极管(LED),其工作
依赖于持续的电流供应。由于VD1断路导致整个电路立即断电,VD6应立即熄灭,而不是“发光一段时间后熄灭”。
电容C虽有储能作用,但其放电路径在VD1断路时被阻断,无法为VD6提供延时供电。A错误。
B. a接B、b接入时,VD5能阻断电路,起保护作用,正确。 VD5可能为保护二极管(如反向阻断二极管)。当a
点连接到B点,且b点接入电路时,若连接极性错误或电压反向,VD5可反向偏置,阻断电流,防止电路损坏。
这符合二极管保护功能的常见设计。
C. 增大电容C的容量,RL两端的电压波动幅度变小,正确。电容C在电源模块中起滤波作用,用于平滑输出电压。
增大电容容量可提高储能能力,减小电源纹波,从而使负载RL两端的电压更稳定,波动幅度减小。这是电源滤波
电路的基本原理。
D. 电容C断路时,流过VD6的电流会时断时续,正确。 电容C断路后,电源滤波功能失效。输入电压的纹波或
波动(如来自整流电路的脉动直流)将直接传递到负载,导致流过VD6的电流不稳定(时断时续)。VD6作为LED,
可能因此闪烁。
故选A。
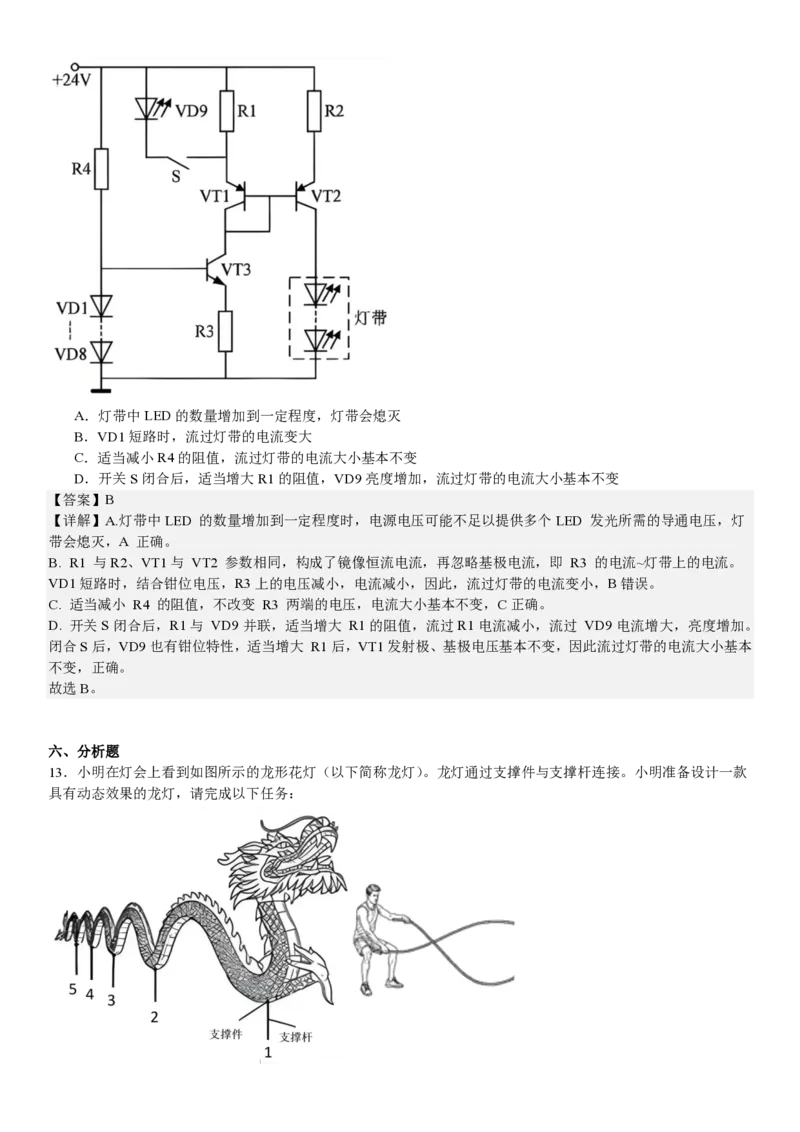
12.如图所示是小明设计的灯带电路模型,R1与R2、VT1与VT2参数相同,VD1-VD8为硅二极管。初始状态时,
VT1、VT2、VT3均工作在放大区。下列分析中不正确的是( )
...A.灯带中LED的数量增加到一定程度,灯带会熄灭
B.VD1短路时,流过灯带的电流变大
C.适当减小R4的阻值,流过灯带的电流大小基本不变
D.开关S闭合后,适当增大R1的阻值,VD9亮度增加,流过灯带的电流大小基本不变
【答案】B
【详解】A.灯带中LED 的数量增加到一定程度时,电源电压可能不足以提供多个LED 发光所需的导通电压,灯
带会熄灭,A 正确。
B. R1 与R2、VT1与 VT2 参数相同,构成了镜像恒流电流,再忽略基极电流,即 R3 的电流~灯带上的电流。
VD1短路时,结合钳位电压,R3上的电压减小,电流减小,因此,流过灯带的电流变小,B错误。
C. 适当减小 R4 的阻值,不改变 R3 两端的电压,电流大小基本不变,C正确。
D. 开关S闭合后,R1与 VD9并联,适当增大 R1的阻值,流过R1电流减小,流过 VD9电流增大,亮度增加。
闭合S后,VD9也有钳位特性,适当增大 R1后,VT1发射极、基极电压基本不变,因此流过灯带的电流大小基本
不变,正确。
故选B。
六、分析题
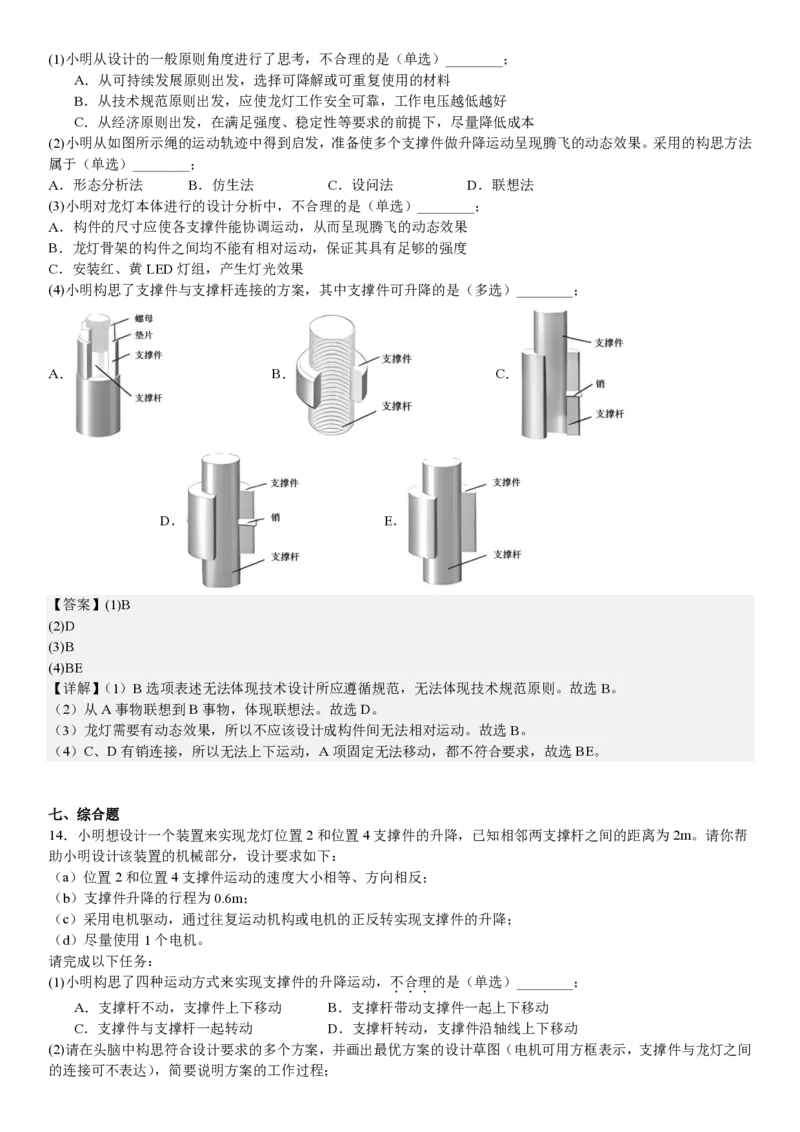
13.小明在灯会上看到如图所示的龙形花灯(以下简称龙灯)。龙灯通过支撑件与支撑杆连接。小明准备设计一款
具有动态效果的龙灯,请完成以下任务:(1)小明从设计的一般原则角度进行了思考,不合理的是(单选)________;
A.从可持续发展原则出发,选择可降解或可重复使用的材料
B.从技术规范原则出发,应使龙灯工作安全可靠,工作电压越低越好
C.从经济原则出发,在满足强度、稳定性等要求的前提下,尽量降低成本
(2)小明从如图所示绳的运动轨迹中得到启发,准备使多个支撑件做升降运动呈现腾飞的动态效果。采用的构思方法
属于(单选)________;
A.形态分析法 B.仿生法 C.设问法 D.联想法
(3)小明对龙灯本体进行的设计分析中,不合理的是(单选)________;
A.构件的尺寸应使各支撑件能协调运动,从而呈现腾飞的动态效果
B.龙灯骨架的构件之间均不能有相对运动,保证其具有足够的强度
C.安装红、黄LED灯组,产生灯光效果
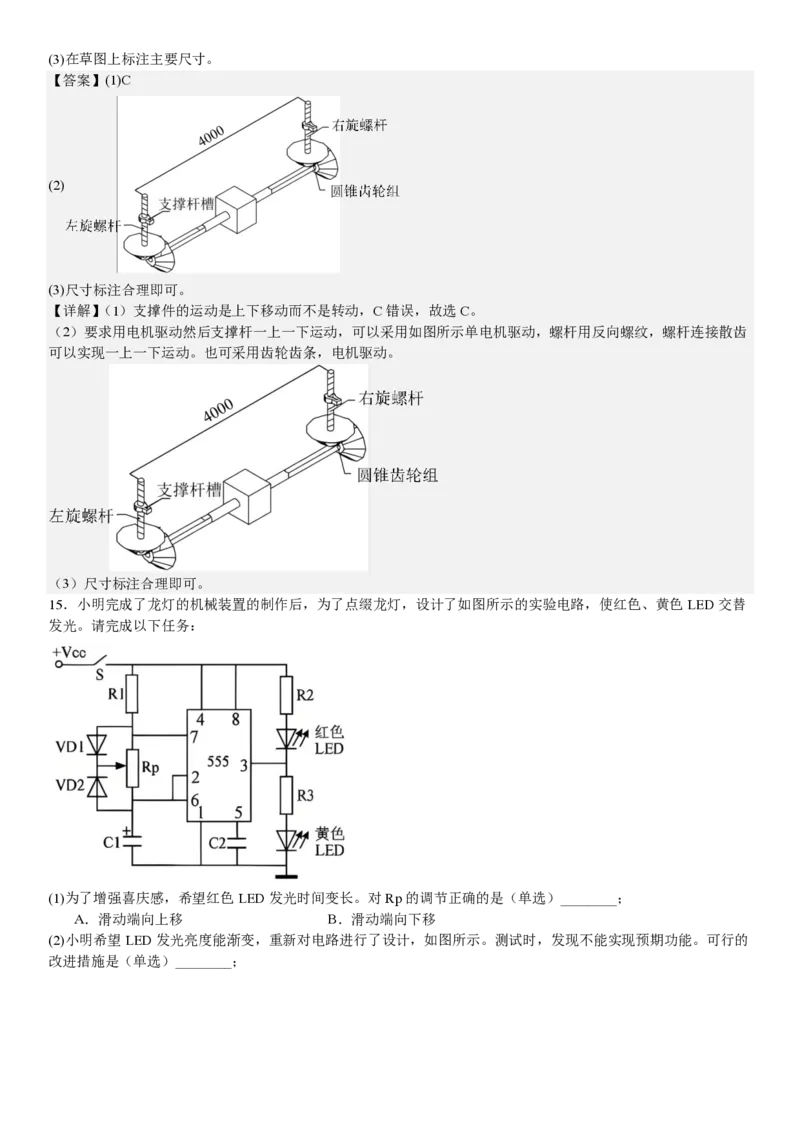
(4)小明构思了支撑件与支撑杆连接的方案,其中支撑件可升降的是(多选)________;
A. B. C.
D. E.
【答案】(1)B
(2)D
(3)B
(4)BE
【详解】(1)B选项表述无法体现技术设计所应遵循规范,无法体现技术规范原则。故选B。
(2)从A事物联想到B事物,体现联想法。故选D。
(3)龙灯需要有动态效果,所以不应该设计成构件间无法相对运动。故选B。
(4)C、D有销连接,所以无法上下运动,A项固定无法移动,都不符合要求,故选BE。
七、综合题
14.小明想设计一个装置来实现龙灯位置2和位置4支撑件的升降,已知相邻两支撑杆之间的距离为2m。请你帮
助小明设计该装置的机械部分,设计要求如下:
(a)位置2和位置4支撑件运动的速度大小相等、方向相反;
(b)支撑件升降的行程为0.6m;
(c)采用电机驱动,通过往复运动机构或电机的正反转实现支撑件的升降;
(d)尽量使用1个电机。
请完成以下任务:
(1)小明构思了四种运动方式来实现支撑件的升降运动,不合理的是(单选)________;
...
A.支撑杆不动,支撑件上下移动 B.支撑杆带动支撑件一起上下移动
C.支撑件与支撑杆一起转动 D.支撑杆转动,支撑件沿轴线上下移动
(2)请在头脑中构思符合设计要求的多个方案,并画出最优方案的设计草图(电机可用方框表示,支撑件与龙灯之间
的连接可不表达),简要说明方案的工作过程;(3)在草图上标注主要尺寸。
【答案】(1)C
(2)
(3)尺寸标注合理即可。
【详解】(1)支撑件的运动是上下移动而不是转动,C错误,故选C。
(2)要求用电机驱动然后支撑杆一上一下运动,可以采用如图所示单电机驱动,螺杆用反向螺纹,螺杆连接散齿
可以实现一上一下运动。也可采用齿轮齿条,电机驱动。
(3)尺寸标注合理即可。
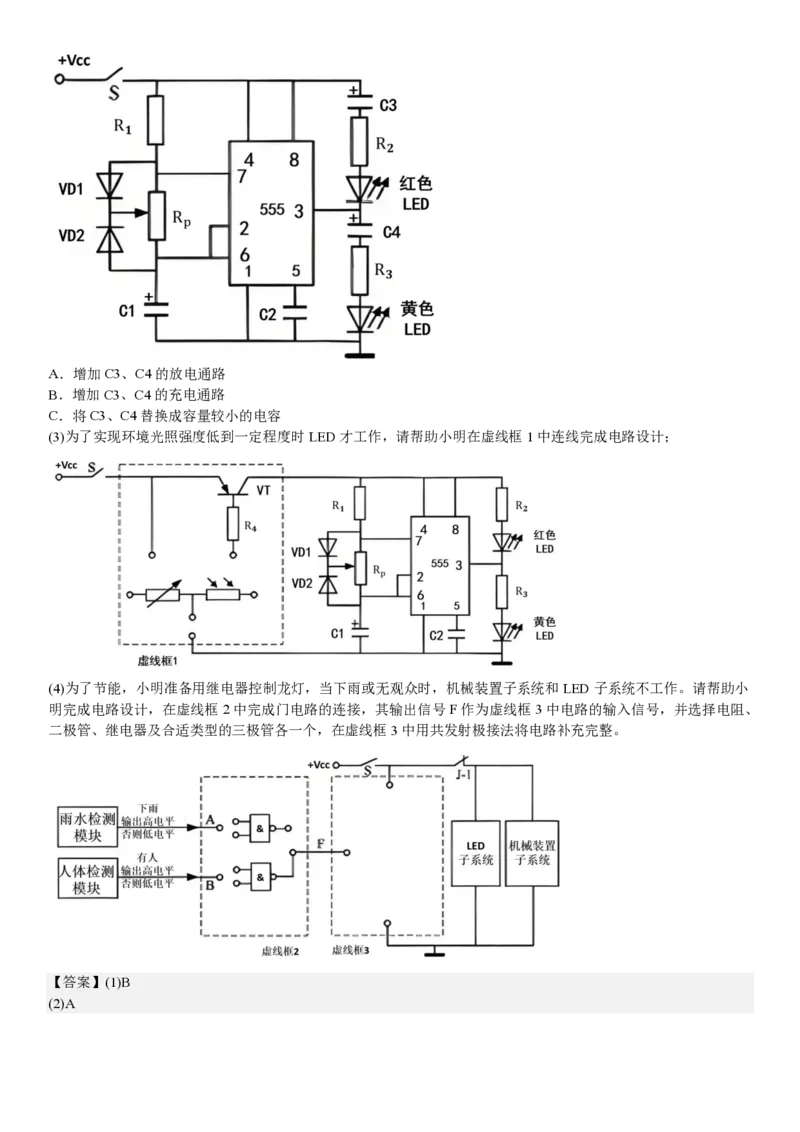
15.小明完成了龙灯的机械装置的制作后,为了点缀龙灯,设计了如图所示的实验电路,使红色、黄色LED交替
发光。请完成以下任务:
(1)为了增强喜庆感,希望红色LED发光时间变长。对Rp的调节正确的是(单选)________;
A.滑动端向上移 B.滑动端向下移
(2)小明希望LED发光亮度能渐变,重新对电路进行了设计,如图所示。测试时,发现不能实现预期功能。可行的
改进措施是(单选)________;A.增加C3、C4的放电通路
B.增加C3、C4的充电通路
C.将C3、C4替换成容量较小的电容
(3)为了实现环境光照强度低到一定程度时LED才工作,请帮助小明在虚线框1中连线完成电路设计;
(4)为了节能,小明准备用继电器控制龙灯,当下雨或无观众时,机械装置子系统和LED子系统不工作。请帮助小
明完成电路设计,在虚线框2中完成门电路的连接,其输出信号F作为虚线框3中电路的输入信号,并选择电阻、
二极管、继电器及合适类型的三极管各一个,在虚线框3中用共发射极接法将电路补充完整。
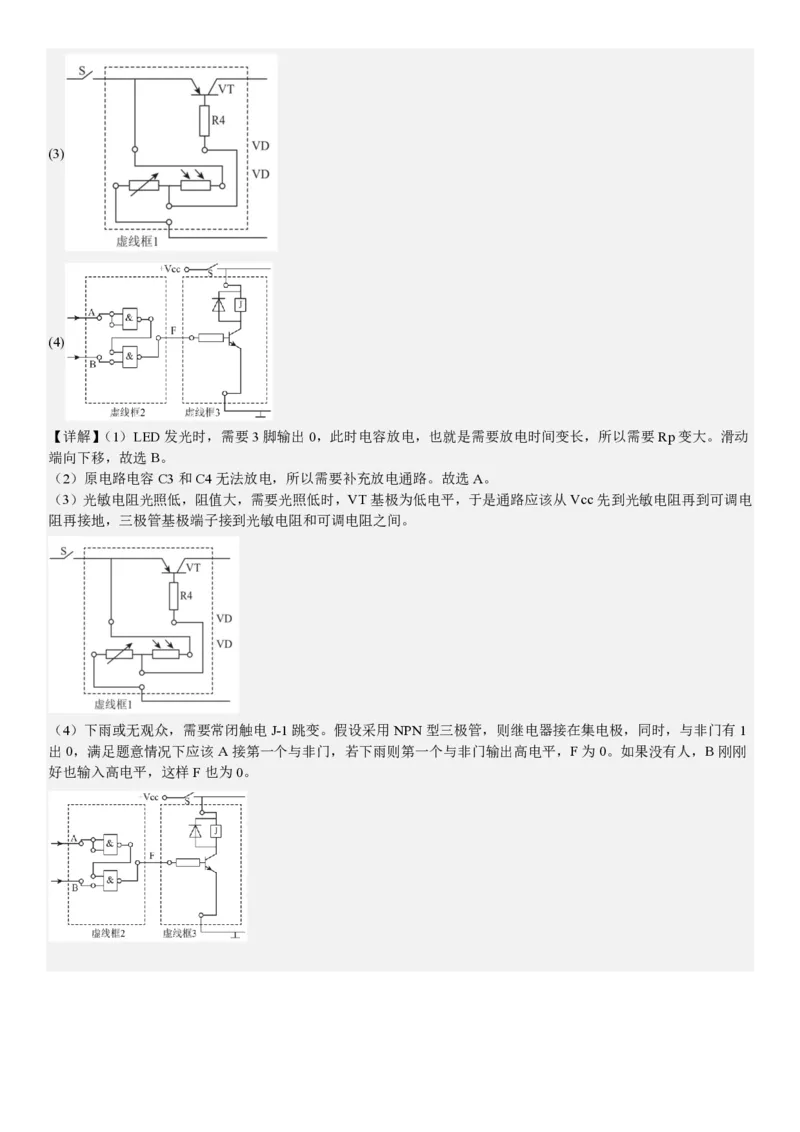
【答案】(1)B
(2)A(3)
(4)
【详解】(1)LED发光时,需要3脚输出0,此时电容放电,也就是需要放电时间变长,所以需要Rp变大。滑动
端向下移,故选B。
(2)原电路电容C3和C4无法放电,所以需要补充放电通路。故选A。
(3)光敏电阻光照低,阻值大,需要光照低时,VT基极为低电平,于是通路应该从Vcc先到光敏电阻再到可调电
阻再接地,三极管基极端子接到光敏电阻和可调电阻之间。
(4)下雨或无观众,需要常闭触电J-1跳变。假设采用NPN型三极管,则继电器接在集电极,同时,与非门有1
出0,满足题意情况下应该A接第一个与非门,若下雨则第一个与非门输出高电平,F为0。如果没有人,B刚刚
好也输入高电平,这样F也为0。
