
文档内容
专题 02 共点力的平衡
考向一 静态平衡问题
1.受力分析的常用技巧
(1)转换研究对象法:对于不易判断的力(如弹力和摩擦力),可以借助相互接触物体的受力情况来判定,
还可以借助力和运动的关系进行分析和判断.
(2)假设法:假设弹力、摩擦力存在,运用物体的平衡条件进行相关计算,然后再进一步分析判断.
(3)整体法和隔离法
①不涉及系统内力时,优先考虑应用整体法,即“能整体、不隔离”.
②同样应用“隔离法”,也要先隔离“简单”的物体,如待求量少或受力少或处于边缘处的物体.
③各“隔离体”间的力,表现为作用力与反作用力,对整体系统则表现为内力.
2.求解静态平衡问题的两种常用方法
(1)力的合成法:对研究对象受力分析后,应用平行四边形定则(或三角形定则)求合力的方法.力的合成
法常用于仅受三个共点力作用且保持平衡的物体.
(2)正交分解法:把物体受到的各力都分解到互相垂直的两个方向上,然后分别列出两个方向上合力为零
的方程并求解.当物体受四个及四个以上共点力作用而平衡时,一般采用正交分解法.
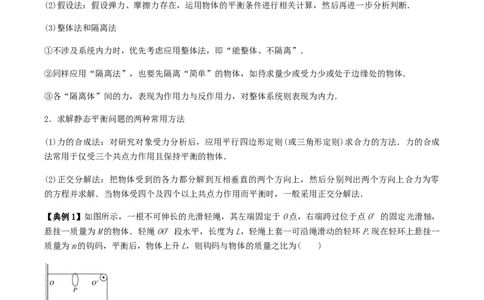
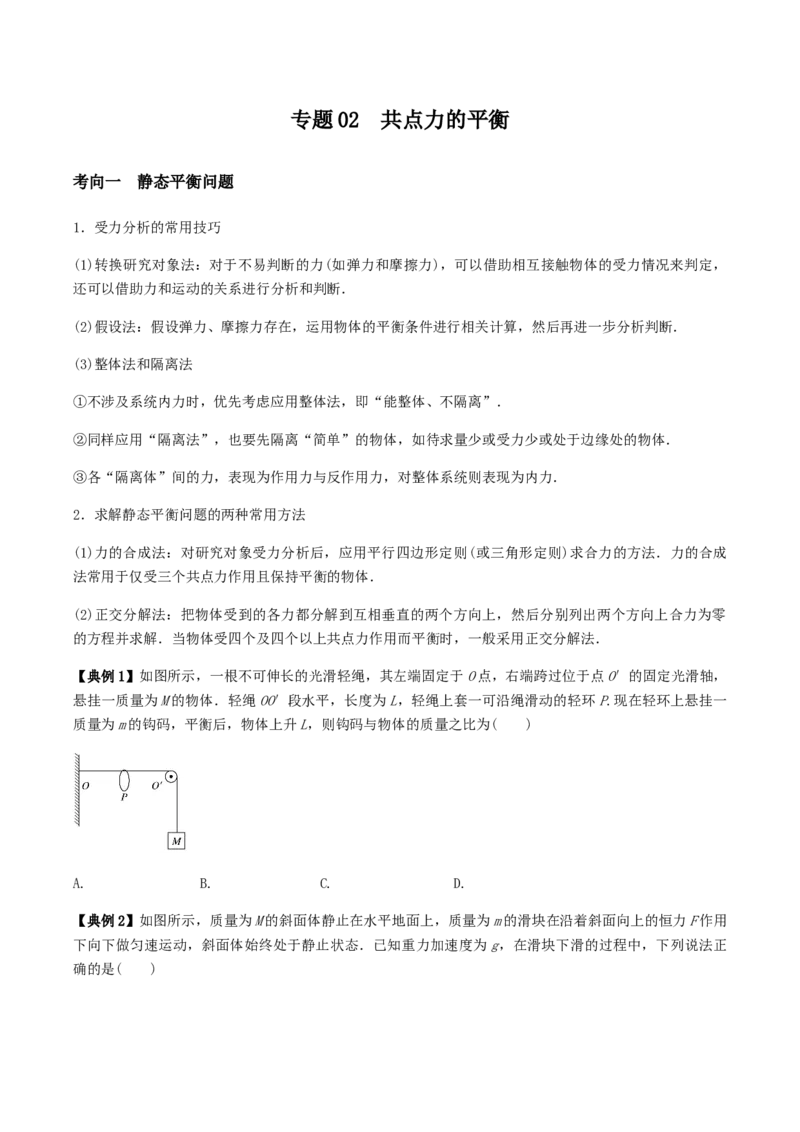
【典例1】如图所示,一根不可伸长的光滑轻绳,其左端固定于O点,右端跨过位于点O′的固定光滑轴,
悬挂一质量为M的物体.轻绳OO′段水平,长度为L,轻绳上套一可沿绳滑动的轻环P.现在轻环上悬挂一
质量为m的钩码,平衡后,物体上升L,则钩码与物体的质量之比为( )
A. B. C. D.
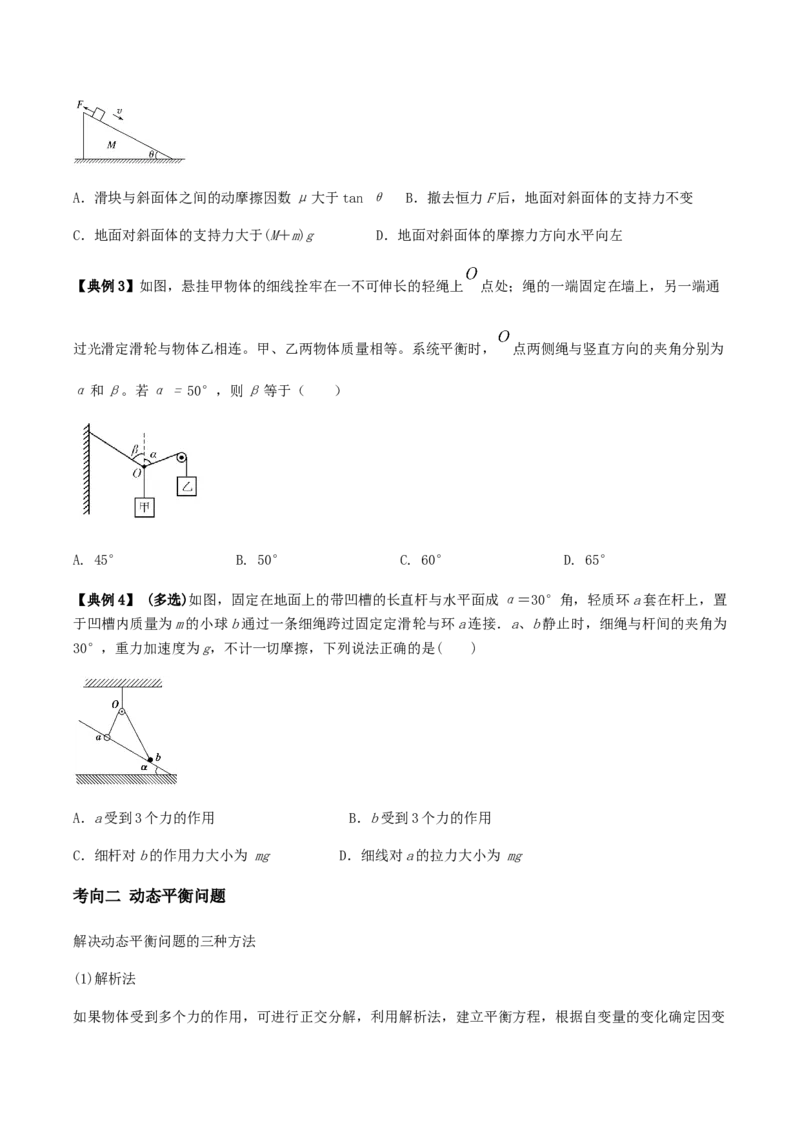
【典例2】如图所示,质量为M的斜面体静止在水平地面上,质量为m的滑块在沿着斜面向上的恒力F作用
下向下做匀速运动,斜面体始终处于静止状态.已知重力加速度为g,在滑块下滑的过程中,下列说法正
确的是( )A.滑块与斜面体之间的动摩擦因数μ大于tan θ B.撤去恒力F后,地面对斜面体的支持力不变
C.地面对斜面体的支持力大于(M+m)g D.地面对斜面体的摩擦力方向水平向左
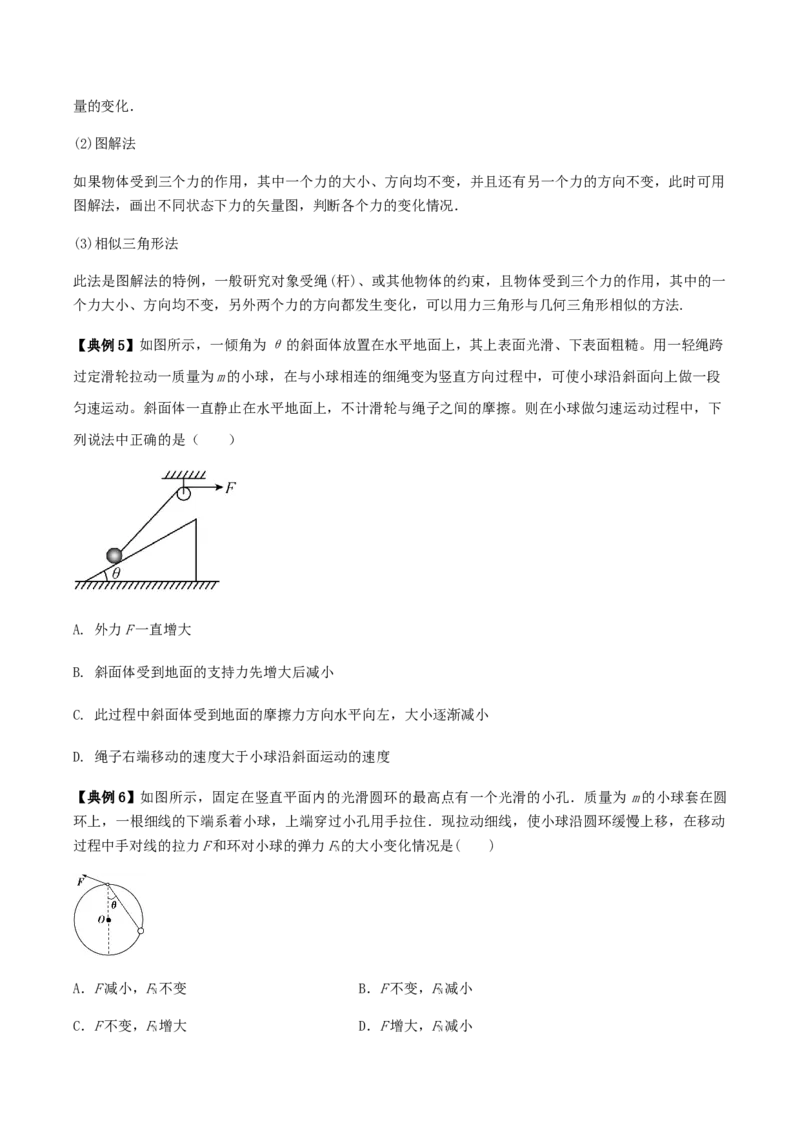
【典例3】如图,悬挂甲物体的细线拴牢在一不可伸长的轻绳上 点处;绳的一端固定在墙上,另一端通
过光滑定滑轮与物体乙相连。甲、乙两物体质量相等。系统平衡时, 点两侧绳与竖直方向的夹角分别为
α和β。若α = 50°,则β等于( )
A. 45° B. 50° C. 60° D. 65°
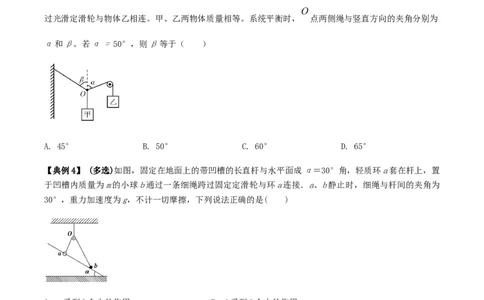
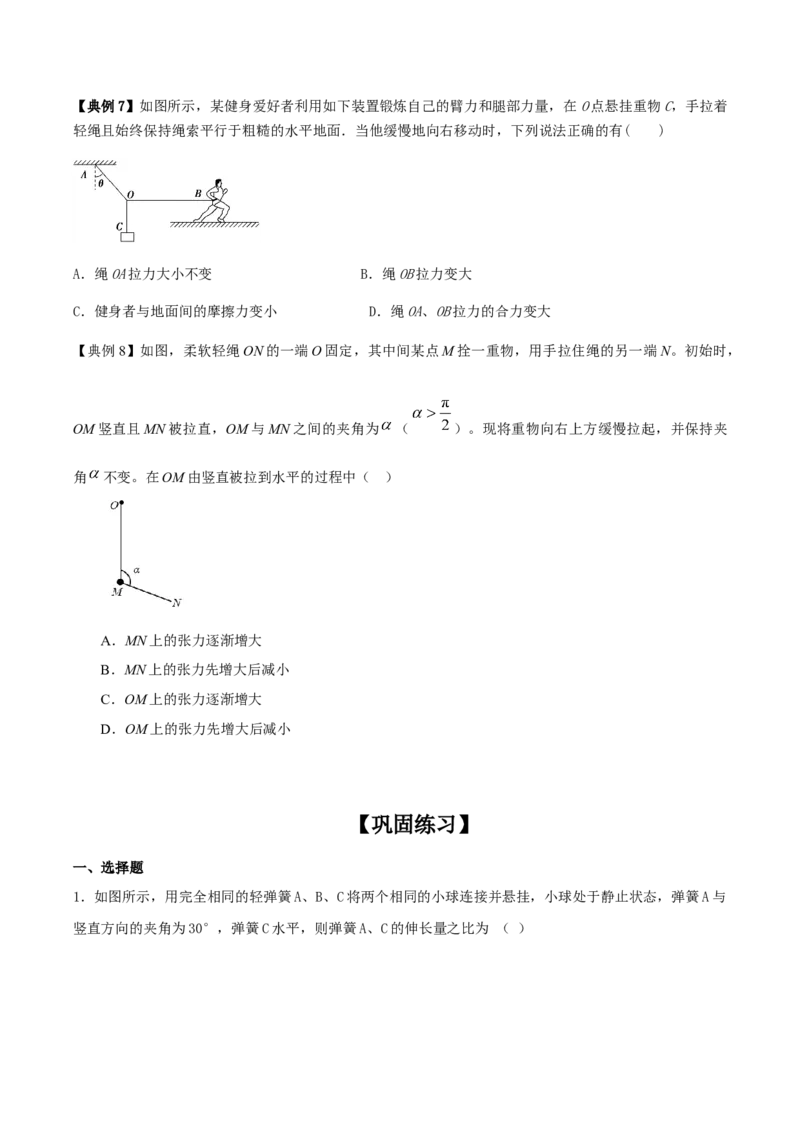
【典例4】 (多选)如图,固定在地面上的带凹槽的长直杆与水平面成α=30°角,轻质环a套在杆上,置
于凹槽内质量为m的小球b通过一条细绳跨过固定定滑轮与环a连接.a、b静止时,细绳与杆间的夹角为
30°,重力加速度为g,不计一切摩擦,下列说法正确的是( )
A.a受到3个力的作用 B.b受到3个力的作用
C.细杆对b的作用力大小为 mg D.细线对a的拉力大小为 mg
考向二 动态平衡问题
解决动态平衡问题的三种方法
(1)解析法
如果物体受到多个力的作用,可进行正交分解,利用解析法,建立平衡方程,根据自变量的变化确定因变量的变化.
(2)图解法
如果物体受到三个力的作用,其中一个力的大小、方向均不变,并且还有另一个力的方向不变,此时可用
图解法,画出不同状态下力的矢量图,判断各个力的变化情况.
(3)相似三角形法
此法是图解法的特例,一般研究对象受绳(杆)、或其他物体的约束,且物体受到三个力的作用,其中的一
个力大小、方向均不变,另外两个力的方向都发生变化,可以用力三角形与几何三角形相似的方法.
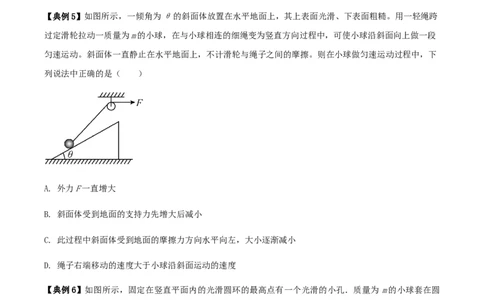
【典例5】如图所示,一倾角为θ的斜面体放置在水平地面上,其上表面光滑、下表面粗糙。用一轻绳跨
过定滑轮拉动一质量为m的小球,在与小球相连的细绳变为竖直方向过程中,可使小球沿斜面向上做一段
匀速运动。斜面体一直静止在水平地面上,不计滑轮与绳子之间的摩擦。则在小球做匀速运动过程中,下
列说法中正确的是( )
A. 外力F一直增大
B. 斜面体受到地面的支持力先增大后减小
C. 此过程中斜面体受到地面的摩擦力方向水平向左,大小逐渐减小
D. 绳子右端移动的速度大于小球沿斜面运动的速度
【典例6】如图所示,固定在竖直平面内的光滑圆环的最高点有一个光滑的小孔.质量为 m的小球套在圆
环上,一根细线的下端系着小球,上端穿过小孔用手拉住.现拉动细线,使小球沿圆环缓慢上移,在移动
过程中手对线的拉力F和环对小球的弹力F的大小变化情况是( )
N
A.F减小,F不变 B.F不变,F减小
N N
C.F不变,F增大 D.F增大,F减小
N N【典例7】如图所示,某健身爱好者利用如下装置锻炼自己的臂力和腿部力量,在O点悬挂重物C,手拉着
轻绳且始终保持绳索平行于粗糙的水平地面.当他缓慢地向右移动时,下列说法正确的有( )
A.绳OA拉力大小不变 B.绳OB拉力变大
C.健身者与地面间的摩擦力变小 D.绳OA、OB拉力的合力变大
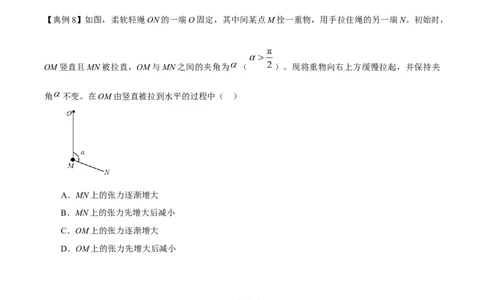
【典例8】如图,柔软轻绳ON的一端O固定,其中间某点M拴一重物,用手拉住绳的另一端N。初始时,
OM竖直且MN被拉直,OM与MN之间的夹角为 ( )。现将重物向右上方缓慢拉起,并保持夹
角 不变。在OM由竖直被拉到水平的过程中( )
A.MN上的张力逐渐增大
B.MN上的张力先增大后减小
C.OM上的张力逐渐增大
D.OM上的张力先增大后减小
【巩固练习】
一、选择题
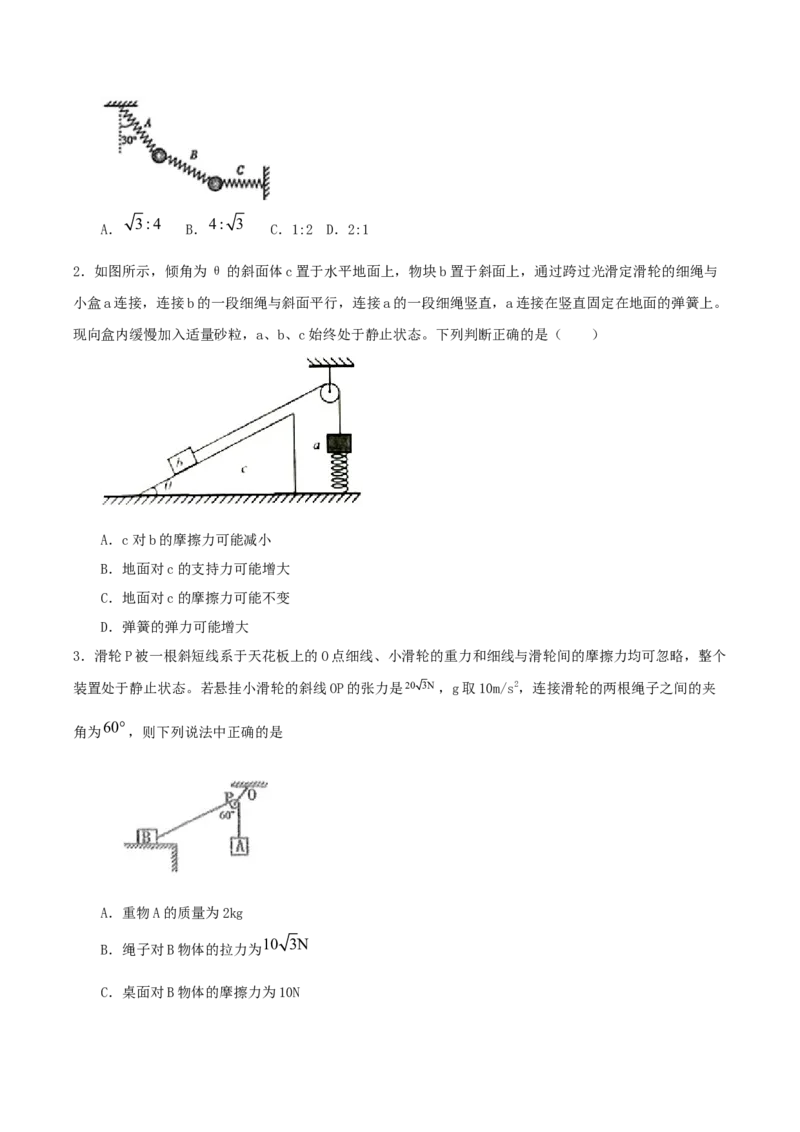
1.如图所示,用完全相同的轻弹簧A、B、C将两个相同的小球连接并悬挂,小球处于静止状态,弹簧A与
竖直方向的夹角为30°,弹簧C水平,则弹簧A、C的伸长量之比为 ( )3:4 4: 3
A. B. C.1:2 D.2:1
2.如图所示,倾角为θ的斜面体c置于水平地面上,物块b置于斜面上,通过跨过光滑定滑轮的细绳与
小盒a连接,连接b的一段细绳与斜面平行,连接a的一段细绳竖直,a连接在竖直固定在地面的弹簧上。
现向盒内缓慢加入适量砂粒,a、b、c始终处于静止状态。下列判断正确的是( )
A.c对b的摩擦力可能减小
B.地面对c的支持力可能增大
C.地面对c的摩擦力可能不变
D.弹簧的弹力可能增大
3.滑轮P被一根斜短线系于天花板上的O点细线、小滑轮的重力和细线与滑轮间的摩擦力均可忽略,整个
装置处于静止状态。若悬挂小滑轮的斜线OP的张力是20 3N,g取10m/s2,连接滑轮的两根绳子之间的夹
60
角为 ,则下列说法中正确的是
A.重物A的质量为2kg
10 3N
B.绳子对B物体的拉力为
C.桌面对B物体的摩擦力为10N60
D.OP与竖直方向的夹角为
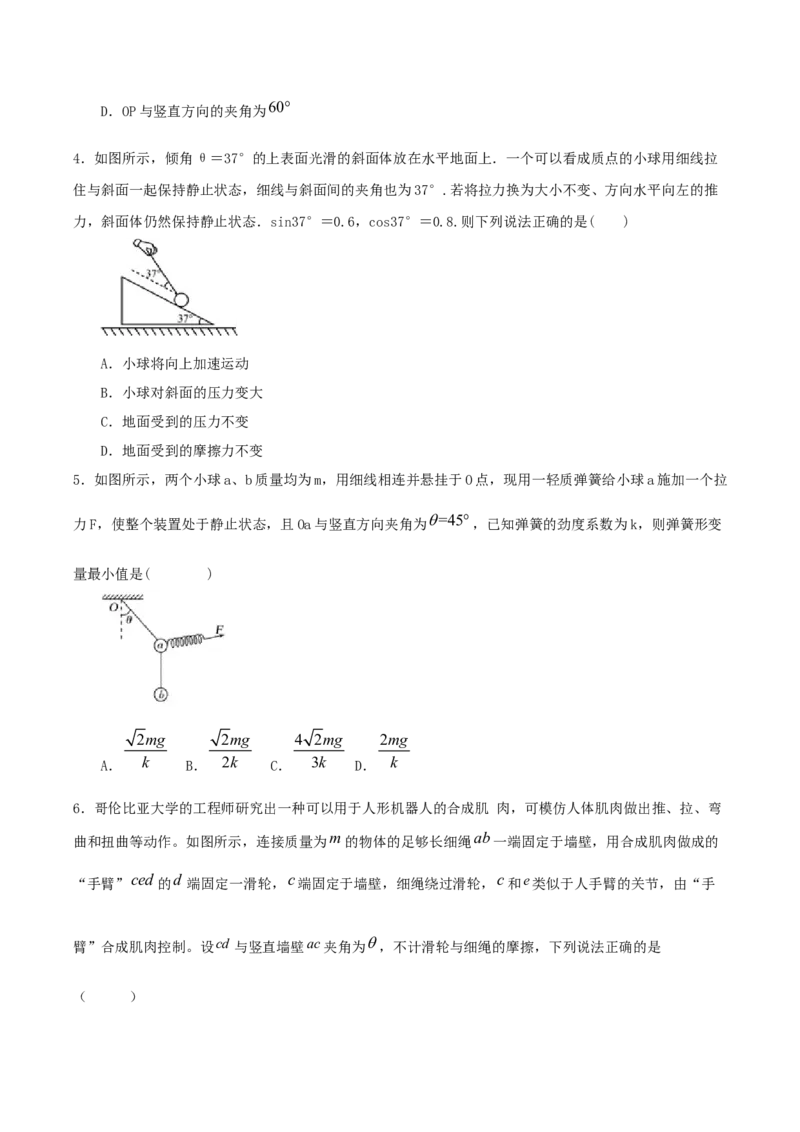
4.如图所示,倾角θ=37°的上表面光滑的斜面体放在水平地面上.一个可以看成质点的小球用细线拉
住与斜面一起保持静止状态,细线与斜面间的夹角也为37°.若将拉力换为大小不变、方向水平向左的推
力,斜面体仍然保持静止状态.sin37°=0.6,cos37°=0.8.则下列说法正确的是( )
A.小球将向上加速运动
B.小球对斜面的压力变大
C.地面受到的压力不变
D.地面受到的摩擦力不变
5.如图所示,两个小球a、b质量均为m,用细线相连并悬挂于O点,现用一轻质弹簧给小球a施加一个拉
=45
力F,使整个装置处于静止状态,且Oa与竖直方向夹角为 ,已知弹簧的劲度系数为k,则弹簧形变
量最小值是( )
2mg 2mg 4 2mg 2mg
A. k B. 2k C. 3k D. k
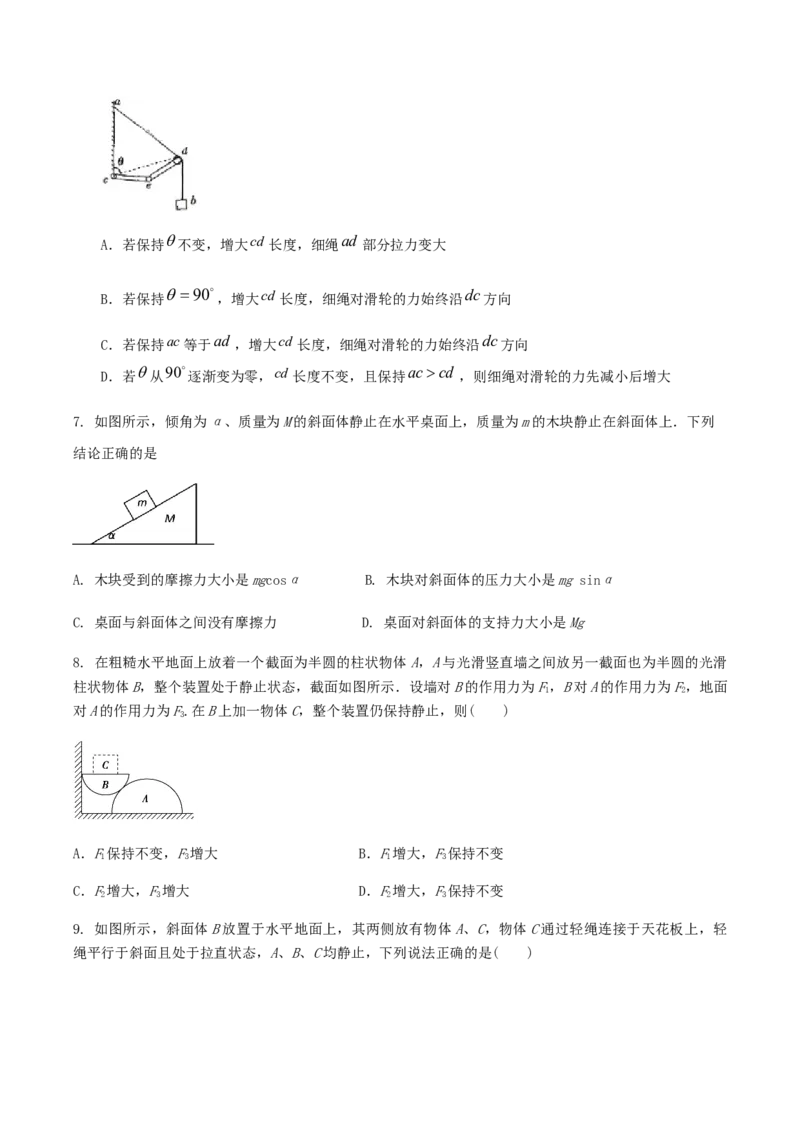
6.哥伦比亚大学的工程师研究出一种可以用于人形机器人的合成肌 肉,可模仿人体肌肉做出推、拉、弯
m ab
曲和扭曲等动作。如图所示,连接质量为 的物体的足够长细绳 一端固定于墙壁,用合成肌肉做成的
“手臂” ced 的 d 端固定一滑轮, c 端固定于墙壁,细绳绕过滑轮, c 和e类似于人手臂的关节,由“手
臂”合成肌肉控制。设cd 与竖直墙壁ac夹角为 ,不计滑轮与细绳的摩擦,下列说法正确的是
( )A.若保持 不变,增大cd 长度,细绳 ad 部分拉力变大
B.若保持 90 ,增大cd 长度,细绳对滑轮的力始终沿 dc 方向
C.若保持ac等于 ad ,增大cd 长度,细绳对滑轮的力始终沿 dc 方向
D.若 从 90 逐渐变为零,cd 长度不变,且保持 accd ,则细绳对滑轮的力先减小后增大
7. 如图所示,倾角为α、质量为M的斜面体静止在水平桌面上,质量为m的木块静止在斜面体上.下列
结论正确的是
A. 木块受到的摩擦力大小是mgcosα B. 木块对斜面体的压力大小是mg sinα
C. 桌面与斜面体之间没有摩擦力 D. 桌面对斜面体的支持力大小是Mg
8. 在粗糙水平地面上放着一个截面为半圆的柱状物体A,A与光滑竖直墙之间放另一截面也为半圆的光滑
柱状物体B,整个装置处于静止状态,截面如图所示.设墙对B的作用力为F,B对A的作用力为F,地面
1 2
对A的作用力为F.在B上加一物体C,整个装置仍保持静止,则( )
3
A.F保持不变,F增大 B.F增大,F保持不变
1 3 1 3
C.F增大,F增大 D.F增大,F保持不变
2 3 2 3
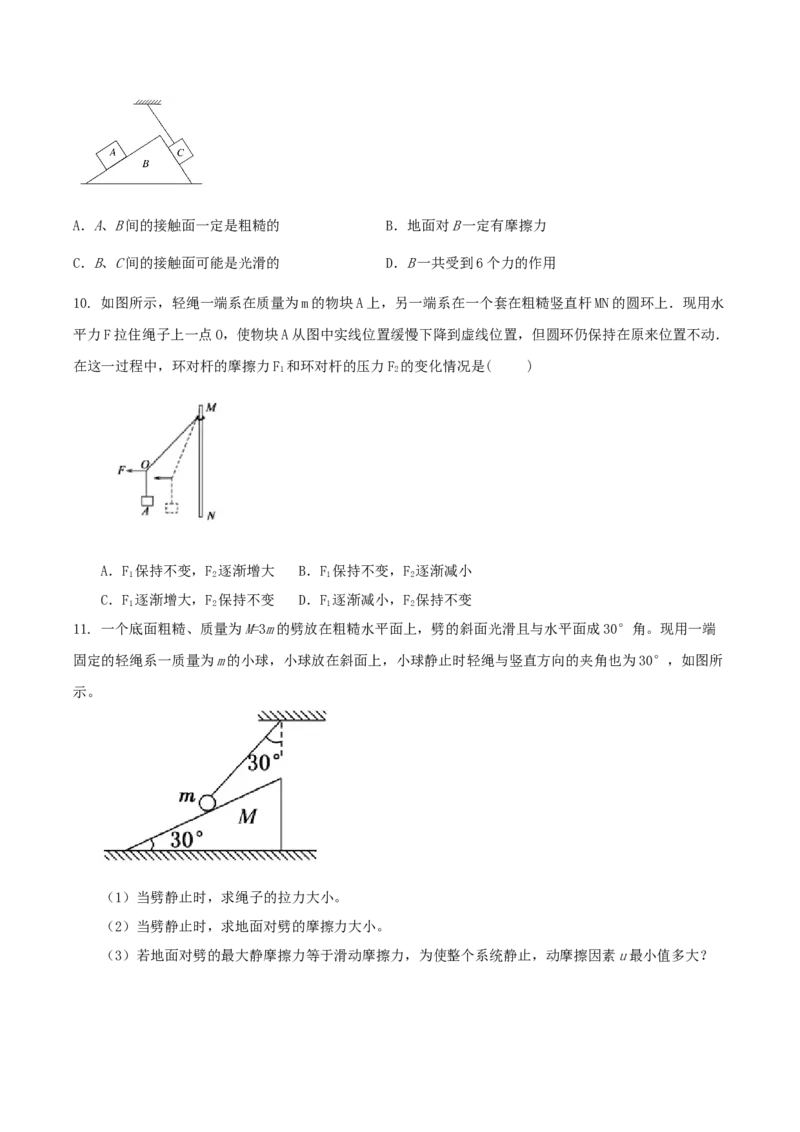
9. 如图所示,斜面体B放置于水平地面上,其两侧放有物体A、C,物体C通过轻绳连接于天花板上,轻
绳平行于斜面且处于拉直状态,A、B、C均静止,下列说法正确的是( )A.A、B间的接触面一定是粗糙的 B.地面对B一定有摩擦力
C.B、C间的接触面可能是光滑的 D.B一共受到6个力的作用
10. 如图所示,轻绳一端系在质量为m的物块A上,另一端系在一个套在粗糙竖直杆MN的圆环上.现用水
平力F拉住绳子上一点O,使物块A从图中实线位置缓慢下降到虚线位置,但圆环仍保持在原来位置不动.
在这一过程中,环对杆的摩擦力F 和环对杆的压力F 的变化情况是( )
1 2
A.F 保持不变,F 逐渐增大 B.F 保持不变,F 逐渐减小
1 2 1 2
C.F 逐渐增大,F 保持不变 D.F 逐渐减小,F 保持不变
1 2 1 2
11. 一个底面粗糙、质量为M=3m的劈放在粗糙水平面上,劈的斜面光滑且与水平面成30°角。现用一端
固定的轻绳系一质量为m的小球,小球放在斜面上,小球静止时轻绳与竖直方向的夹角也为30°,如图所
示。
(1)当劈静止时,求绳子的拉力大小。
(2)当劈静止时,求地面对劈的摩擦力大小。
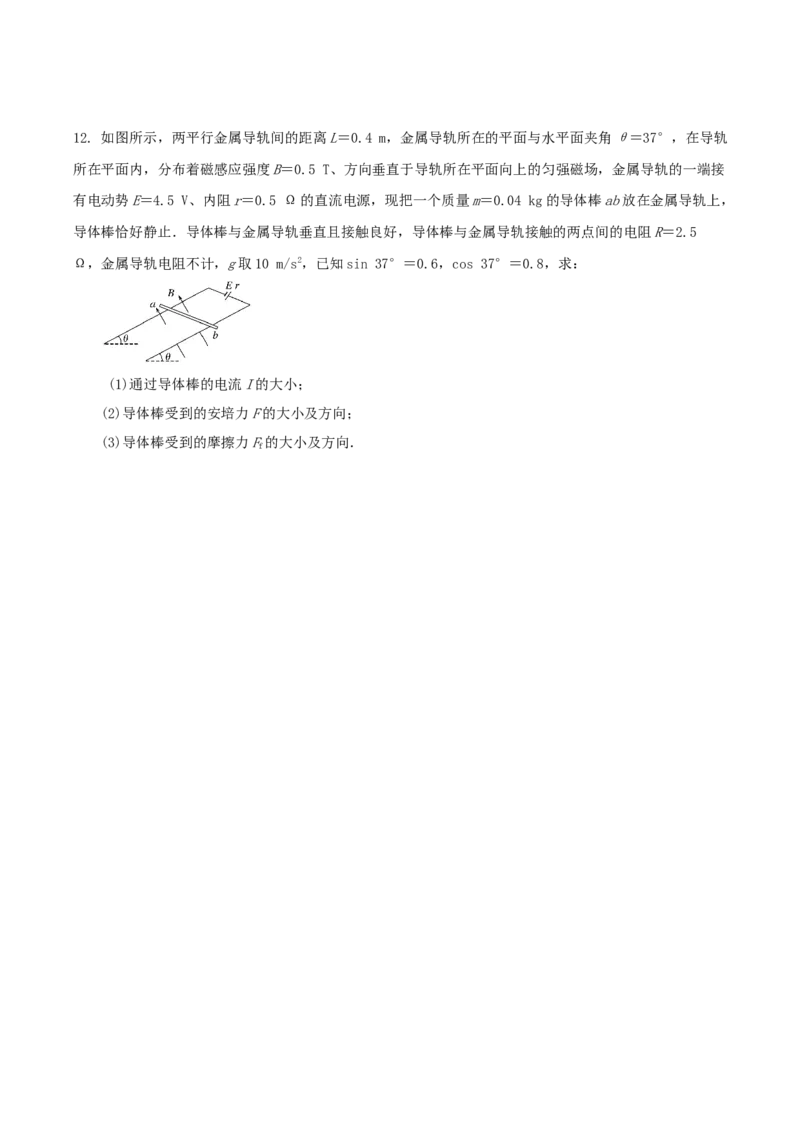
(3)若地面对劈的最大静摩擦力等于滑动摩擦力,为使整个系统静止,动摩擦因素u最小值多大?12. 如图所示,两平行金属导轨间的距离L=0.4 m,金属导轨所在的平面与水平面夹角θ=37°,在导轨
所在平面内,分布着磁感应强度B=0.5 T、方向垂直于导轨所在平面向上的匀强磁场,金属导轨的一端接
有电动势E=4.5 V、内阻r=0.5 Ω的直流电源,现把一个质量m=0.04 kg的导体棒ab放在金属导轨上,
导体棒恰好静止.导体棒与金属导轨垂直且接触良好,导体棒与金属导轨接触的两点间的电阻R=2.5
Ω,金属导轨电阻不计,g取10 m/s2,已知sin 37°=0.6,cos 37°=0.8,求:
(1)通过导体棒的电流I的大小;
(2)导体棒受到的安培力F的大小及方向;
(3)导体棒受到的摩擦力F的大小及方向.
f

