文档内容
专题01 杠杆(解析版)
一、单选题
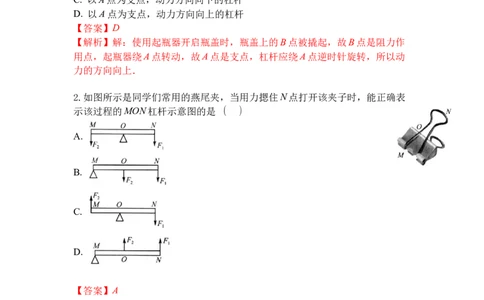
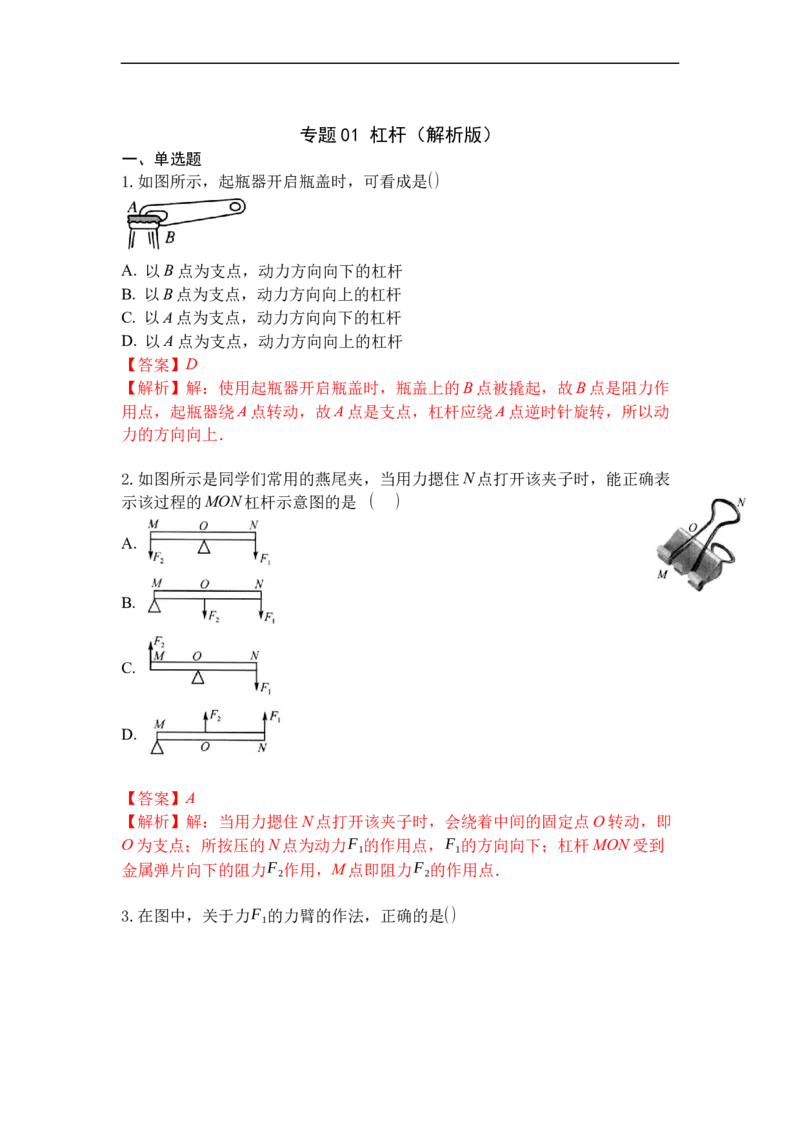
1.如图所示,起瓶器开启瓶盖时,可看成是()
A. 以B点为支点,动力方向向下的杠杆
B. 以B点为支点,动力方向向上的杠杆
C. 以A点为支点,动力方向向下的杠杆
D. 以A点为支点,动力方向向上的杠杆
【答案】D
【解析】解:使用起瓶器开启瓶盖时,瓶盖上的B点被撬起,故B点是阻力作
用点,起瓶器绕A点转动,故A点是支点,杠杆应绕A点逆时针旋转,所以动
力的方向向上.
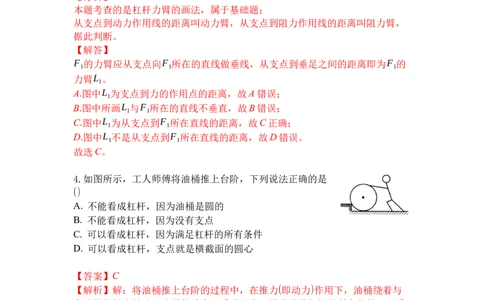
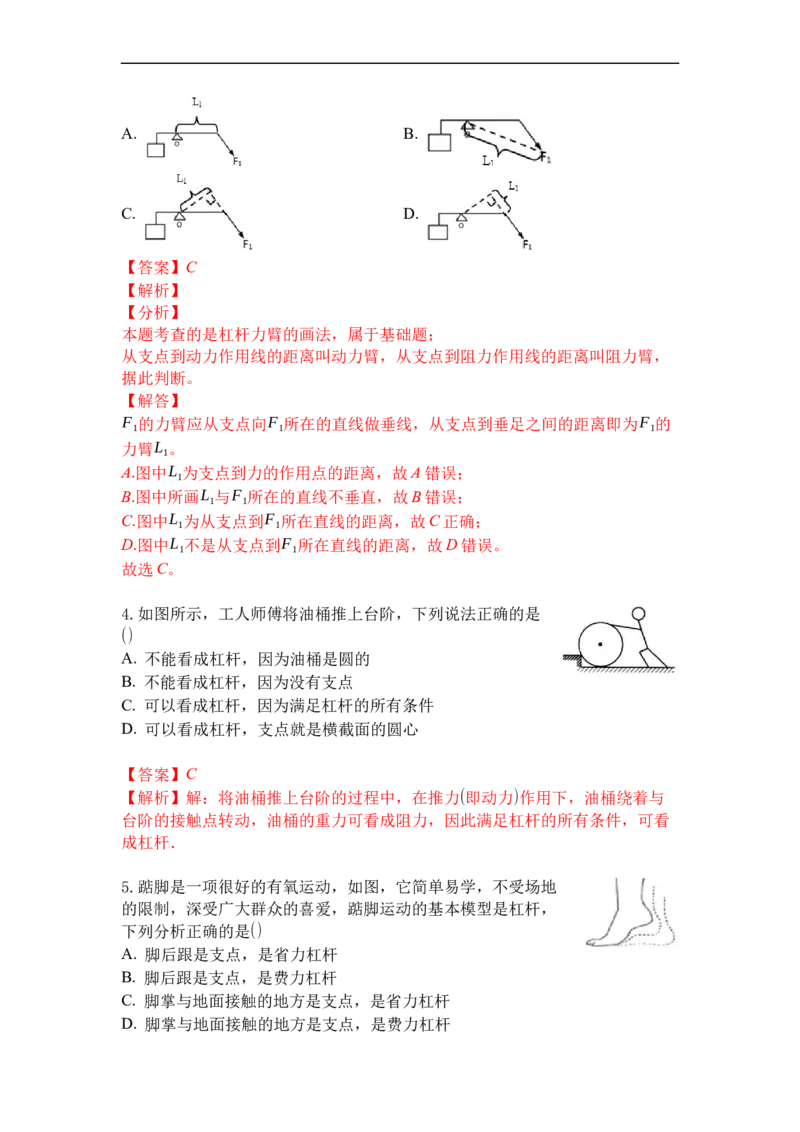
2.如图所示是同学们常用的燕尾夹,当用力摁住N点打开该夹子时,能正确表
示该过程的MON杠杆示意图的是 ( )
A.
B.
C.
D.
【答案】A
【解析】解:当用力摁住N点打开该夹子时,会绕着中间的固定点O转动,即
O为支点;所按压的N点为动力F 的作用点,F 的方向向下;杠杆MON受到
1 1
金属弹片向下的阻力F 作用,M点即阻力F 的作用点.
2 2
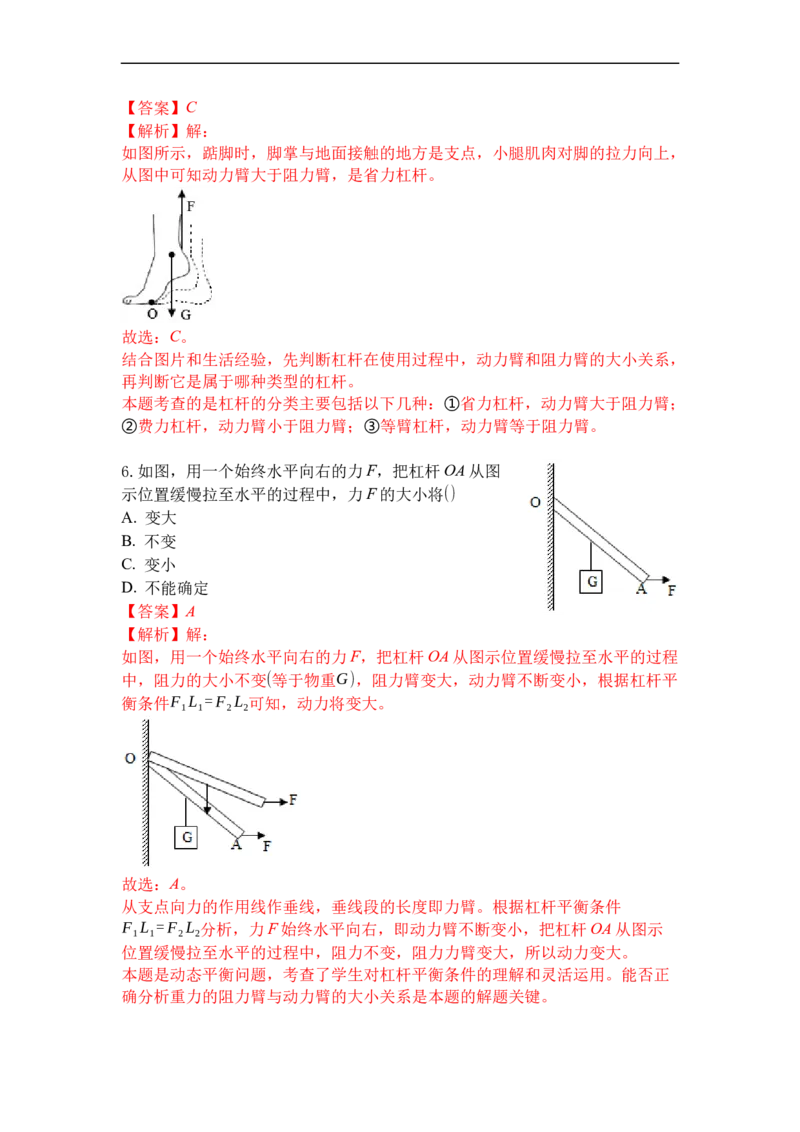
3.在图中,关于力F 的力臂的作法,正确的是()
1A. B.
C. D.
【答案】C
【解析】
【分析】
本题考查的是杠杆力臂的画法,属于基础题;
从支点到动力作用线的距离叫动力臂,从支点到阻力作用线的距离叫阻力臂,
据此判断。
【解答】
F 的力臂应从支点向F 所在的直线做垂线,从支点到垂足之间的距离即为F 的
1 1 1
力臂L 。
1
A.图中L 为支点到力的作用点的距离,故A错误;
1
B.图中所画L 与F 所在的直线不垂直,故B错误;
1 1
C.图中L 为从支点到F 所在直线的距离,故C正确;
1 1
D.图中L 不是从支点到F 所在直线的距离,故D错误。
1 1
故选C。
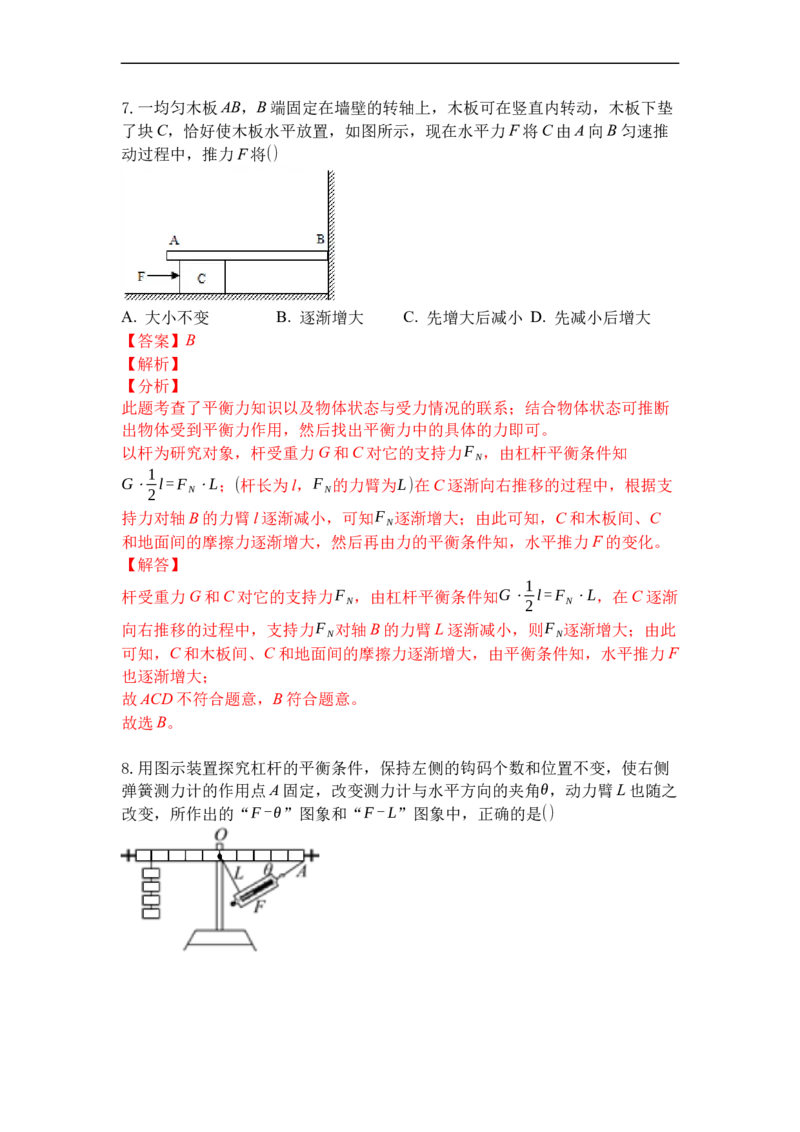
4.如图所示,工人师傅将油桶推上台阶,下列说法正确的是
()
A. 不能看成杠杆,因为油桶是圆的
B. 不能看成杠杆,因为没有支点
C. 可以看成杠杆,因为满足杠杆的所有条件
D. 可以看成杠杆,支点就是横截面的圆心
【答案】C
【解析】解:将油桶推上台阶的过程中,在推力(即动力)作用下,油桶绕着与
台阶的接触点转动,油桶的重力可看成阻力,因此满足杠杆的所有条件,可看
成杠杆.
5.踮脚是一项很好的有氧运动,如图,它简单易学,不受场地
的限制,深受广大群众的喜爱,踮脚运动的基本模型是杠杆,
下列分析正确的是()
A. 脚后跟是支点,是省力杠杆
B. 脚后跟是支点,是费力杠杆
C. 脚掌与地面接触的地方是支点,是省力杠杆
D. 脚掌与地面接触的地方是支点,是费力杠杆【答案】C
【解析】解:
如图所示,踮脚时,脚掌与地面接触的地方是支点,小腿肌肉对脚的拉力向上,
从图中可知动力臂大于阻力臂,是省力杠杆。
故选:C。
结合图片和生活经验,先判断杠杆在使用过程中,动力臂和阻力臂的大小关系,
再判断它是属于哪种类型的杠杆。
本题考查的是杠杆的分类主要包括以下几种:①省力杠杆,动力臂大于阻力臂;
②费力杠杆,动力臂小于阻力臂;③等臂杠杆,动力臂等于阻力臂。
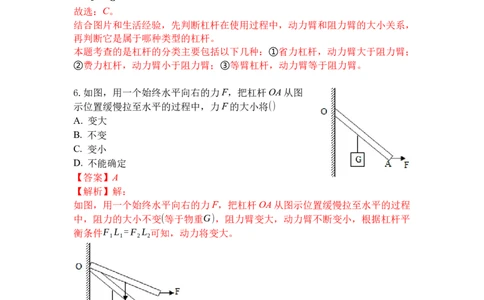
6.如图,用一个始终水平向右的力F,把杠杆OA从图
示位置缓慢拉至水平的过程中,力F的大小将()
A. 变大
B. 不变
C. 变小
D. 不能确定
【答案】A
【解析】解:
如图,用一个始终水平向右的力F,把杠杆OA从图示位置缓慢拉至水平的过程
中,阻力的大小不变(等于物重G),阻力臂变大,动力臂不断变小,根据杠杆平
衡条件F L =F L 可知,动力将变大。
1 1 2 2
故选:A。
从支点向力的作用线作垂线,垂线段的长度即力臂。根据杠杆平衡条件
F L =F L 分析,力F始终水平向右,即动力臂不断变小,把杠杆OA从图示
1 1 2 2
位置缓慢拉至水平的过程中,阻力不变,阻力力臂变大,所以动力变大。
本题是动态平衡问题,考查了学生对杠杆平衡条件的理解和灵活运用。能否正
确分析重力的阻力臂与动力臂的大小关系是本题的解题关键。7.一均匀木板AB,B端固定在墙壁的转轴上,木板可在竖直内转动,木板下垫
了块C,恰好使木板水平放置,如图所示,现在水平力F将C由A向B匀速推
动过程中,推力F将()
A. 大小不变 B. 逐渐增大 C. 先增大后减小 D. 先减小后增大
【答案】B
【解析】
【分析】
此题考查了平衡力知识以及物体状态与受力情况的联系;结合物体状态可推断
出物体受到平衡力作用,然后找出平衡力中的具体的力即可。
以杆为研究对象,杆受重力G和C对它的支持力F ,由杠杆平衡条件知
N
1
G⋅ l=F ⋅L;(杆长为l,F 的力臂为L)在C逐渐向右推移的过程中,根据支
2 N N
持力对轴B的力臂l逐渐减小,可知F 逐渐增大;由此可知,C和木板间、C
N
和地面间的摩擦力逐渐增大,然后再由力的平衡条件知,水平推力F的变化。
【解答】
1
杆受重力G和C对它的支持力F ,由杠杆平衡条件知G⋅ l=F ⋅L,在C逐渐
N 2 N
向右推移的过程中,支持力F 对轴B的力臂L逐渐减小,则F 逐渐增大;由此
N N
可知,C和木板间、C和地面间的摩擦力逐渐增大,由平衡条件知,水平推力F
也逐渐增大;
故ACD不符合题意,B符合题意。
故选B。
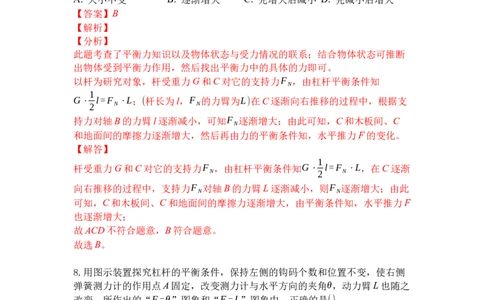
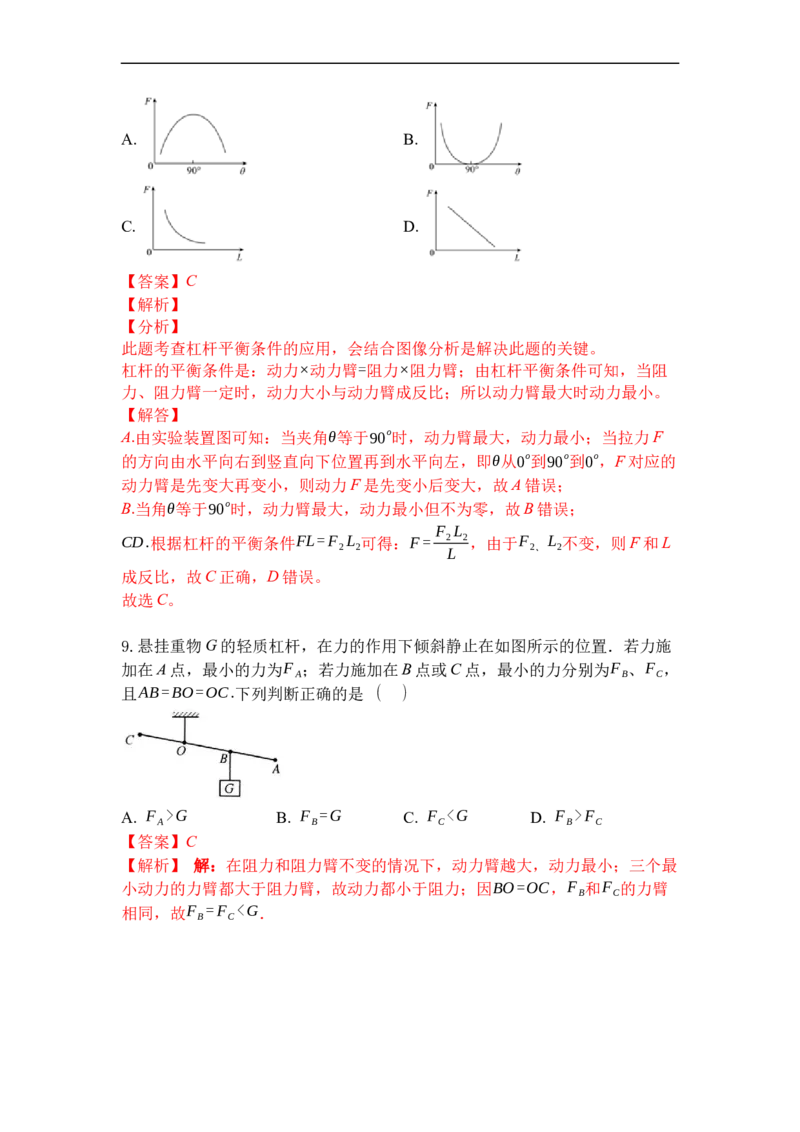
8.用图示装置探究杠杆的平衡条件,保持左侧的钩码个数和位置不变,使右侧
弹簧测力计的作用点A固定,改变测力计与水平方向的夹角θ,动力臂L也随之
改变,所作出的“F-θ”图象和“F-L”图象中,正确的是()A. B.
C. D.
【答案】C
【解析】
【分析】
此题考查杠杆平衡条件的应用,会结合图像分析是解决此题的关键。
杠杆的平衡条件是:动力×动力臂=阻力×阻力臂;由杠杆平衡条件可知,当阻
力、阻力臂一定时,动力大小与动力臂成反比;所以动力臂最大时动力最小。
【解答】
A.由实验装置图可知:当夹角θ等于90o时,动力臂最大,动力最小;当拉力F
的方向由水平向右到竖直向下位置再到水平向左,即θ从0o到90o到0o,F对应的
动力臂是先变大再变小,则动力F是先变小后变大,故A错误;
B.当角θ等于90o时,动力臂最大,动力最小但不为零,故B错误;
F L
CD.根据杠杆的平衡条件FL=F L 可得:F= 2 2,由于F L 不变,则F和L
2 2 L 2、 2
成反比,故C正确,D错误。
故选C。
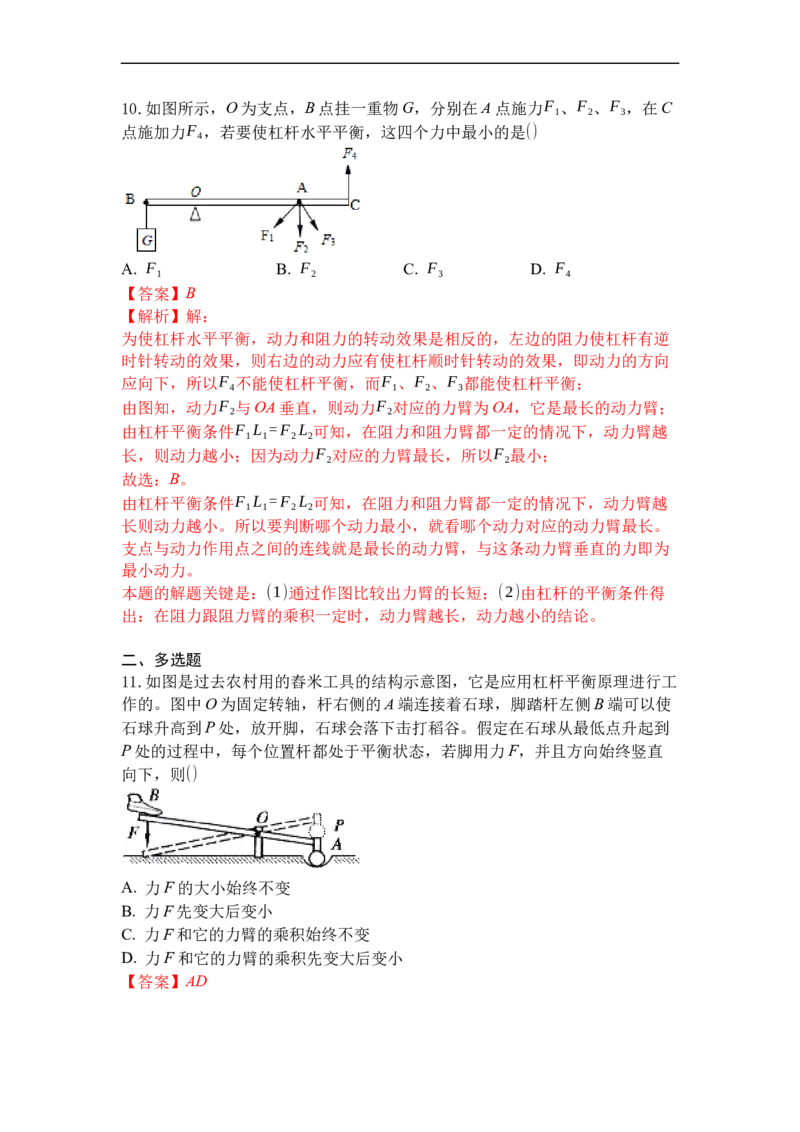
9.悬挂重物G的轻质杠杆,在力的作用下倾斜静止在如图所示的位置.若力施
加在A点,最小的力为F ;若力施加在B点或C点,最小的力分别为F 、F ,
A B C
且AB=BO=OC.下列判断正确的是 ( )
A. F >G B. F =G C. F F
A B C B C
【答案】C
【解析】 解:在阻力和阻力臂不变的情况下,动力臂越大,动力最小;三个最
小动力的力臂都大于阻力臂,故动力都小于阻力;因BO=OC,F 和F 的力臂
B C
相同,故F =F ”“<”或“=”)G .
B
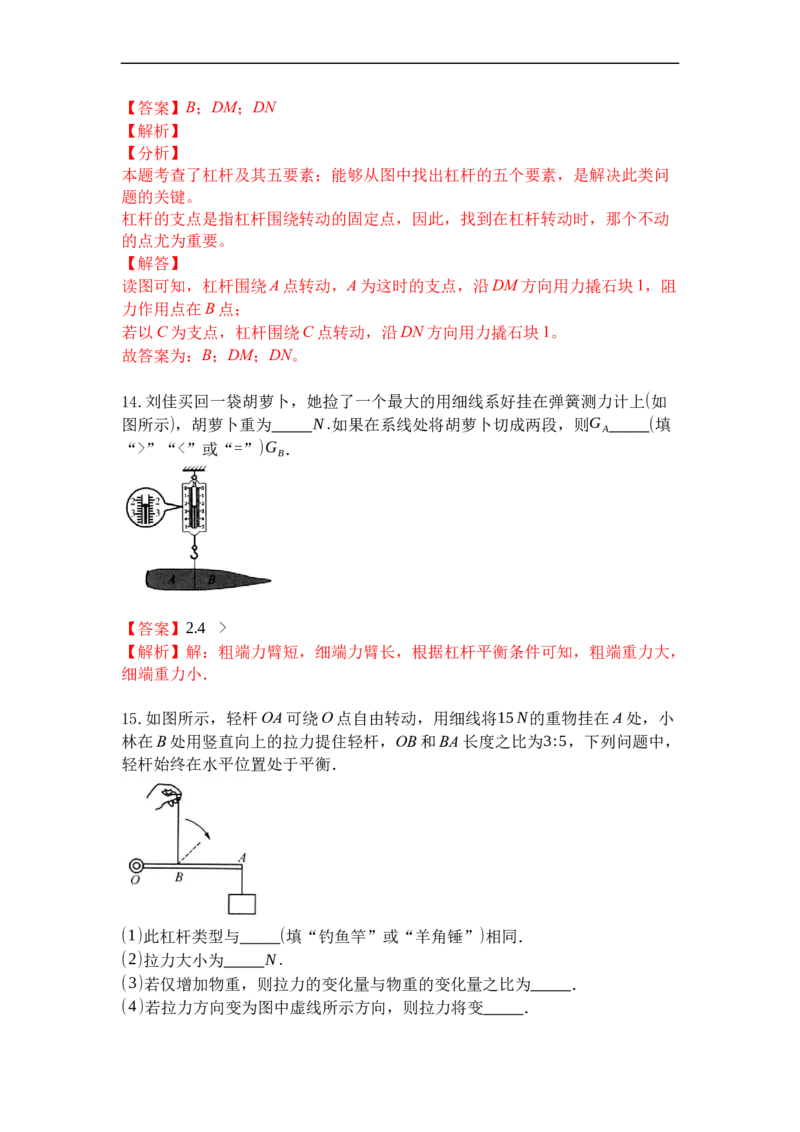
【答案】2.4 >
【解析】解:粗端力臂短,细端力臂长,根据杠杆平衡条件可知,粗端重力大,
细端重力小.
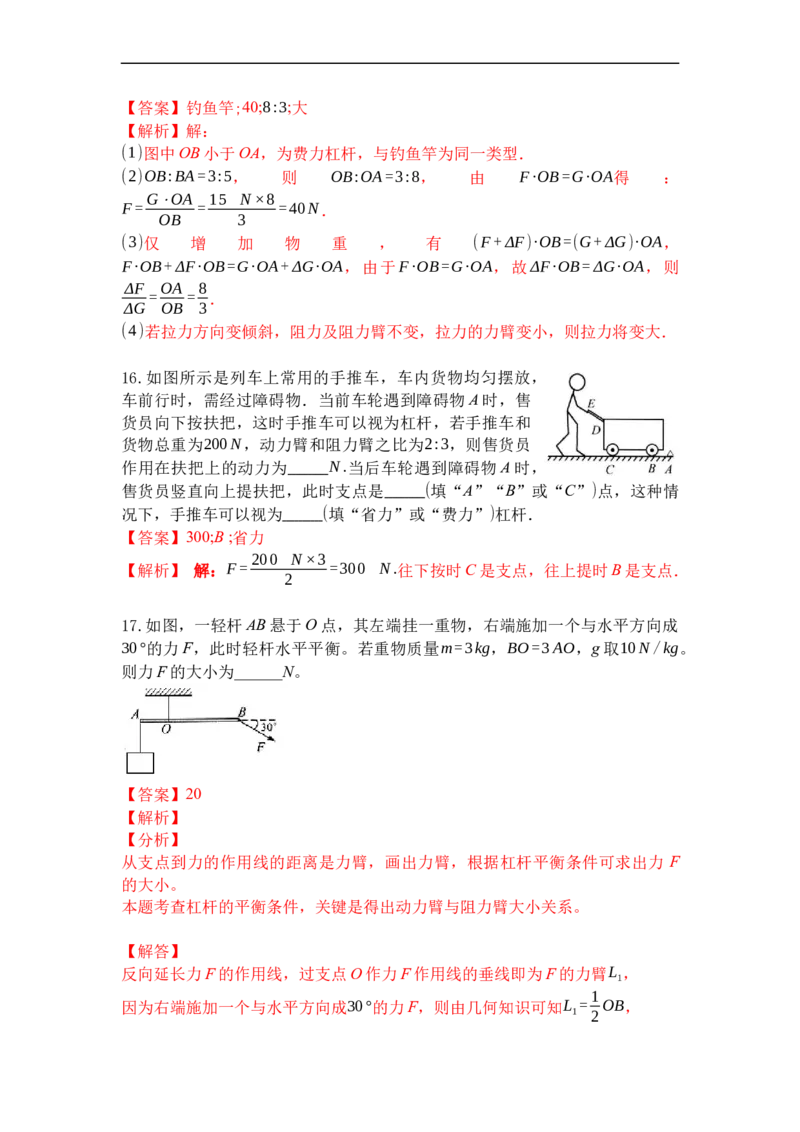
15.如图所示,轻杆OA可绕O点自由转动,用细线将15N的重物挂在A处,小
林在B处用竖直向上的拉力提住轻杆,OB和BA长度之比为3:5,下列问题中,
轻杆始终在水平位置处于平衡.
(1)此杠杆类型与 (填“钓鱼竿”或“羊角锤”)相同.
(2)拉力大小为 N.
(3)若仅增加物重,则拉力的变化量与物重的变化量之比为 .
(4)若拉力方向变为图中虚线所示方向,则拉力将变 .【答案】钓鱼竿;40;8:3;大
【解析】解:
(1)图中OB小于OA,为费力杠杆,与钓鱼竿为同一类型.
(2)OB:BA=3:5, 则 OB:OA=3:8, 由 F·OB=G·OA得 :
G⋅OA 15 N×8
F= = =40N.
OB 3
(3)仅 增 加 物 重 , 有 (F+ΔF)·OB=(G+ΔG)·OA,
F·OB+ΔF·OB=G·OA+ΔG·OA,由于F·OB=G·OA,故ΔF·OB=ΔG·OA,则
ΔF OA 8
= = .
ΔG OB 3
(4)若拉力方向变倾斜,阻力及阻力臂不变,拉力的力臂变小,则拉力将变大.
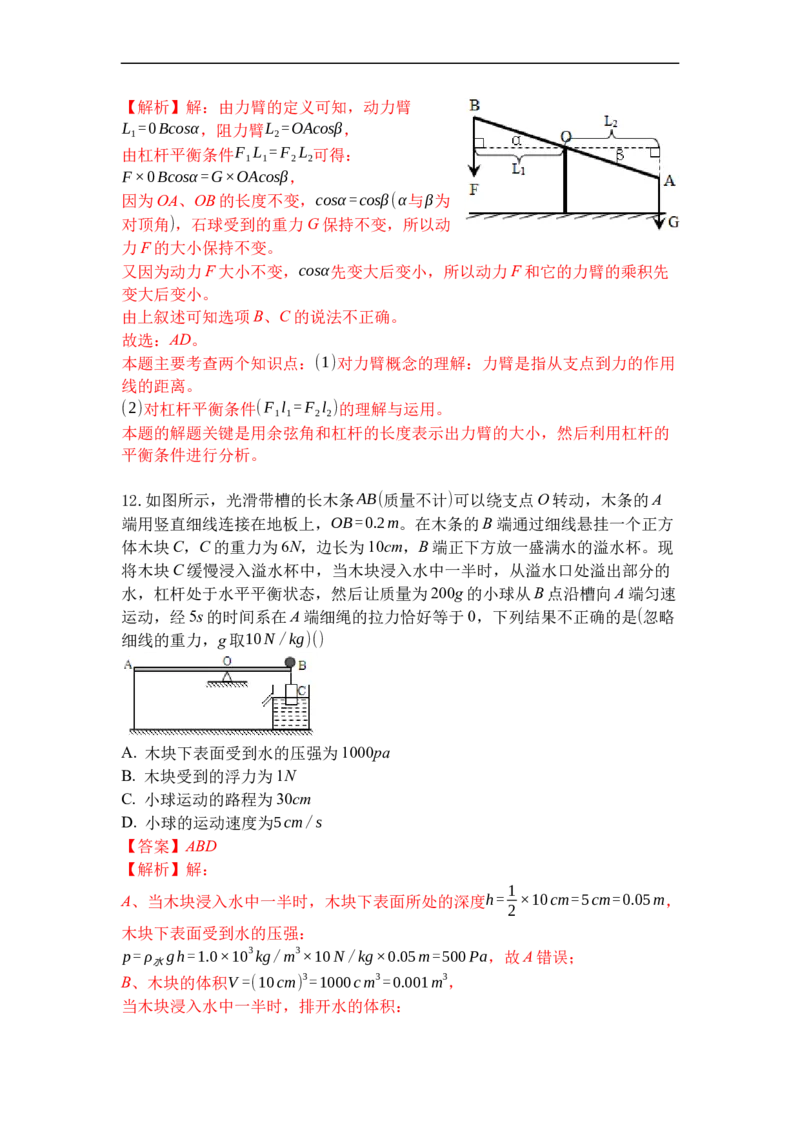
16.如图所示是列车上常用的手推车,车内货物均匀摆放,
车前行时,需经过障碍物.当前车轮遇到障碍物A时,售
货员向下按扶把,这时手推车可以视为杠杆,若手推车和
货物总重为200N,动力臂和阻力臂之比为2:3,则售货员
作用在扶把上的动力为 N.当后车轮遇到障碍物A时,
售货员竖直向上提扶把,此时支点是 (填“A”“B”或“C”)点,这种情
况下,手推车可以视为 (填“省力”或“费力”)杠杆.
【答案】300;B ;省力
200 N×3
【解析】 解:F= =300 N.往下按时C是支点,往上提时B是支点.
2
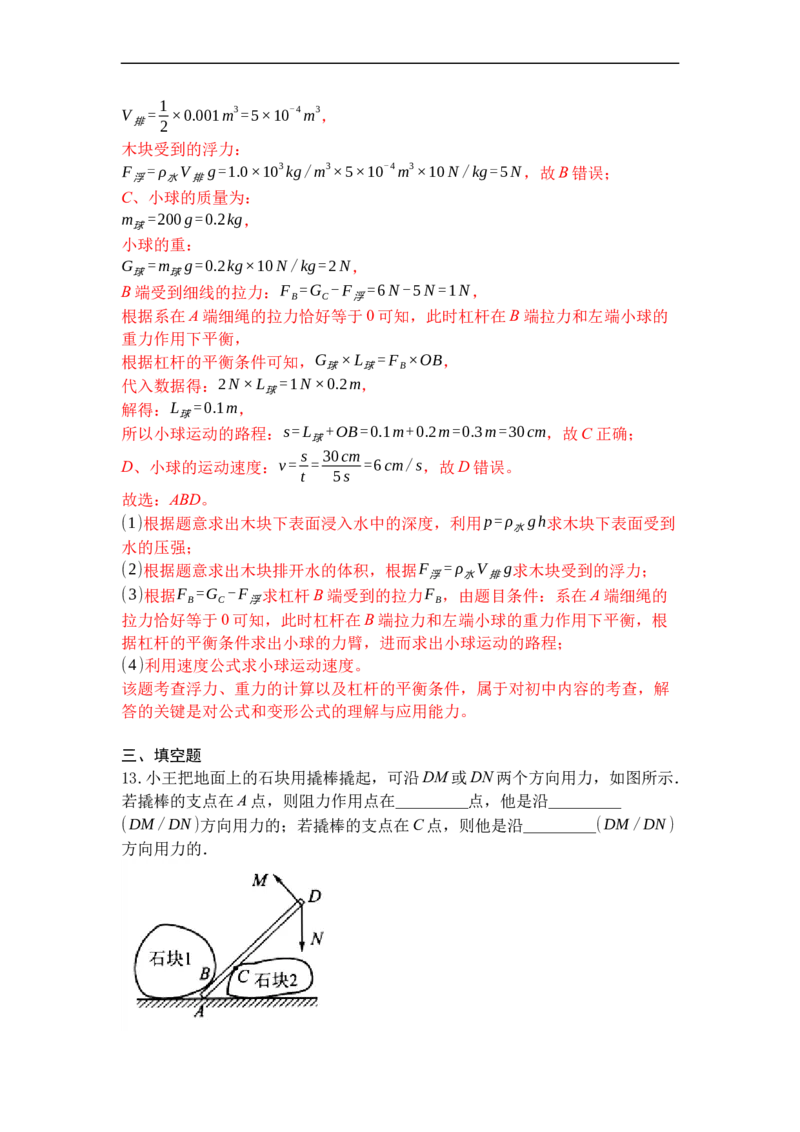
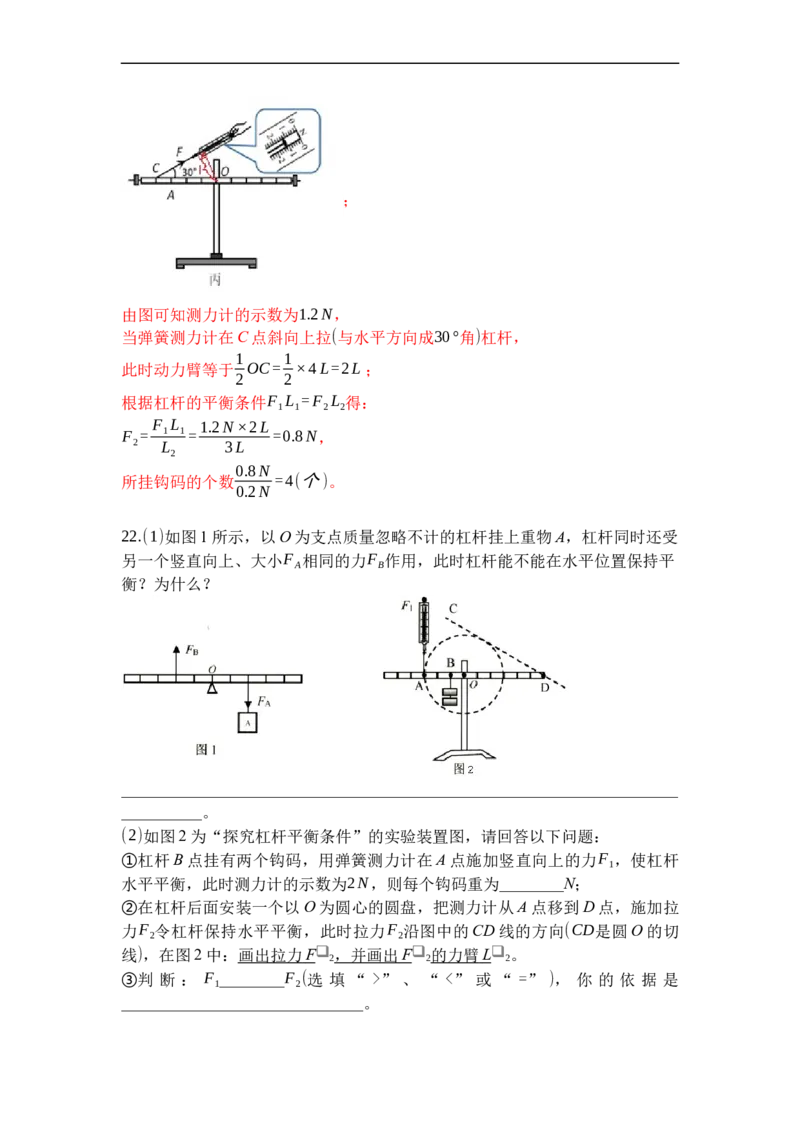
17.如图,一轻杆AB悬于O点,其左端挂一重物,右端施加一个与水平方向成
30°的力F,此时轻杆水平平衡。若重物质量m=3kg,BO=3AO,g取10N/kg。
则力F的大小为______N。
【答案】20
【解析】
【分析】
从支点到力的作用线的距离是力臂,画出力臂,根据杠杆平衡条件可求出力 F
的大小。
本题考查杠杆的平衡条件,关键是得出动力臂与阻力臂大小关系。
【解答】
反向延长力F的作用线,过支点O作力F作用线的垂线即为F的力臂L ,
1
1
因为右端施加一个与水平方向成30°的力F,则由几何知识可知L = OB,
1 2已知BO=3AO,重物质量m=3kg,则物体重力G=mg=3kg×10N/kg=30N,
由杠杆平衡条件得:G×L =F×L ,
2 1
1
即G×OA=F× OB,
2
1
代入数据可得,30N×OA=F× ×3OA,
2
解得F=20N。
故答案为:20。
四、作图题
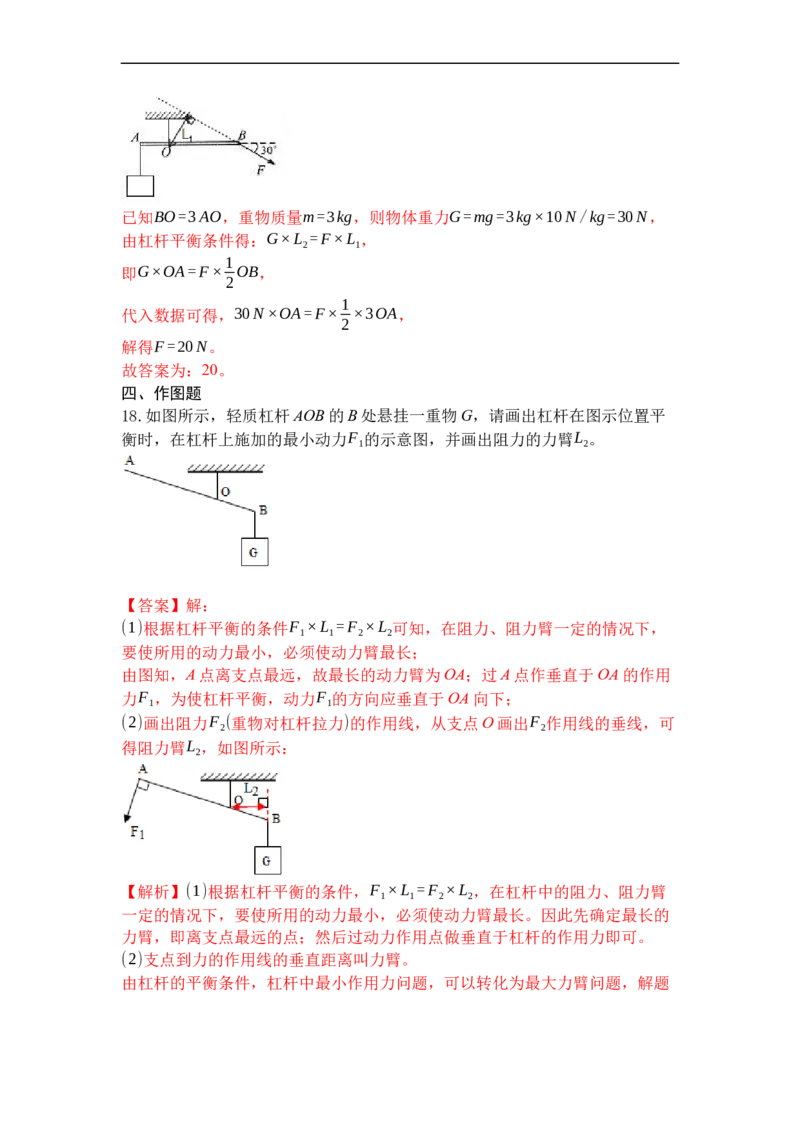
18.如图所示,轻质杠杆AOB的B处悬挂一重物G,请画出杠杆在图示位置平
衡时,在杠杆上施加的最小动力F 的示意图,并画出阻力的力臂L 。
1 2
【答案】解:
(1)根据杠杆平衡的条件F ×L =F ×L 可知,在阻力、阻力臂一定的情况下,
1 1 2 2
要使所用的动力最小,必须使动力臂最长;
由图知,A点离支点最远,故最长的动力臂为OA;过A点作垂直于OA的作用
力F ,为使杠杆平衡,动力F 的方向应垂直于OA向下;
1 1
(2)画出阻力F (重物对杠杆拉力)的作用线,从支点O画出F 作用线的垂线,可
2 2
得阻力臂L ,如图所示:
2
【解析】(1)根据杠杆平衡的条件,F ×L =F ×L ,在杠杆中的阻力、阻力臂
1 1 2 2
一定的情况下,要使所用的动力最小,必须使动力臂最长。因此先确定最长的
力臂,即离支点最远的点;然后过动力作用点做垂直于杠杆的作用力即可。
(2)支点到力的作用线的垂直距离叫力臂。
由杠杆的平衡条件,杠杆中最小作用力问题,可以转化为最大力臂问题,解题的关键是找出最长的力臂。
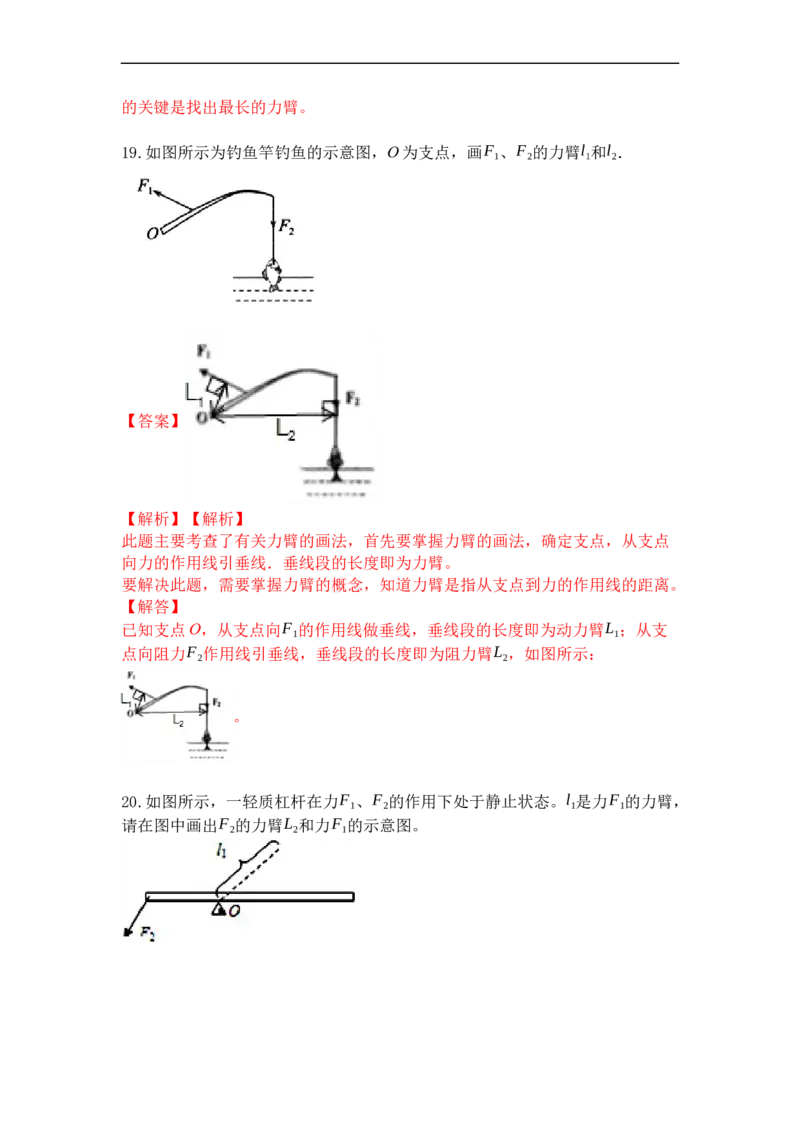
19.如图所示为钓鱼竿钓鱼的示意图,O为支点,画F 、F 的力臂l 和l .
1 2 1 2
【答案】
【解析】【解析】
此题主要考查了有关力臂的画法,首先要掌握力臂的画法,确定支点,从支点
向力的作用线引垂线.垂线段的长度即为力臂。
要解决此题,需要掌握力臂的概念,知道力臂是指从支点到力的作用线的距离。
【解答】
已知支点O,从支点向F 的作用线做垂线,垂线段的长度即为动力臂L ;从支
1 1
点向阻力F 作用线引垂线,垂线段的长度即为阻力臂L ,如图所示:
2 2
。
20.如图所示,一轻质杠杆在力F 、F 的作用下处于静止状态。l 是力F 的力臂,
1 2 1 1
请在图中画出F 的力臂L 和力F 的示意图。
2 2 1【答案】
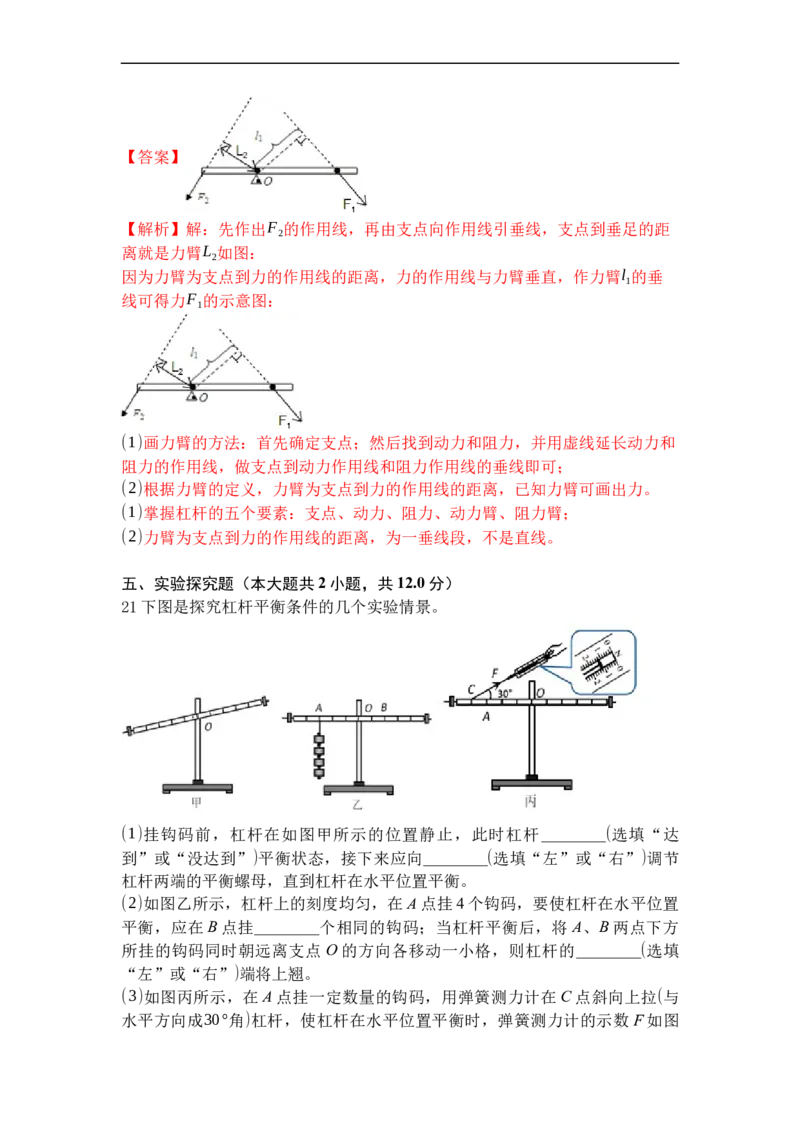
【解析】解:先作出F 的作用线,再由支点向作用线引垂线,支点到垂足的距
2
离就是力臂L 如图:
2
因为力臂为支点到力的作用线的距离,力的作用线与力臂垂直,作力臂l 的垂
1
线可得力F 的示意图:
1
(1)画力臂的方法:首先确定支点;然后找到动力和阻力,并用虚线延长动力和
阻力的作用线,做支点到动力作用线和阻力作用线的垂线即可;
(2)根据力臂的定义,力臂为支点到力的作用线的距离,已知力臂可画出力。
(1)掌握杠杆的五个要素:支点、动力、阻力、动力臂、阻力臂;
(2)力臂为支点到力的作用线的距离,为一垂线段,不是直线。
五、实验探究题(本大题共2小题,共12.0分)
21下图是探究杠杆平衡条件的几个实验情景。
(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆________(选填“达
到”或“没达到”)平衡状态,接下来应向________(选填“左”或“右”)调节
杠杆两端的平衡螺母,直到杠杆在水平位置平衡。
(2)如图乙所示,杠杆上的刻度均匀,在A点挂4个钩码,要使杠杆在水平位置
平衡,应在 B点挂________个相同的钩码;当杠杆平衡后,将 A、B两点下方
所挂的钩码同时朝远离支点 O的方向各移动一小格,则杠杆的________(选填
“左”或“右”)端将上翘。
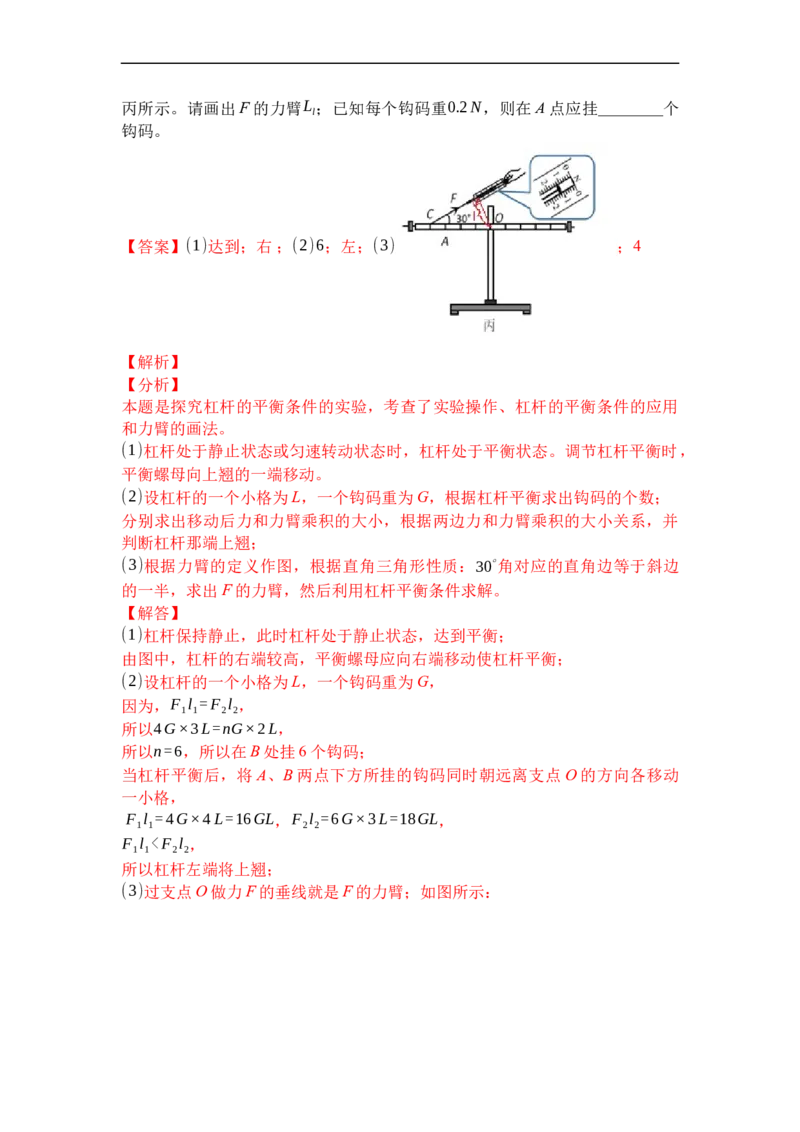
(3)如图丙所示,在A点挂一定数量的钩码,用弹簧测力计在C点斜向上拉(与
水平方向成30°角)杠杆,使杠杆在水平位置平衡时,弹簧测力计的示数 F如图丙所示。请画出F的力臂L;已知每个钩码重0.2N,则在A点应挂________个
l
钩码。
【答案】(1)达到;右 ;(2)6;左;(3) ;4
【解析】
【分析】
本题是探究杠杆的平衡条件的实验,考查了实验操作、杠杆的平衡条件的应用
和力臂的画法。
(1)杠杆处于静止状态或匀速转动状态时,杠杆处于平衡状态。调节杠杆平衡时,
平衡螺母向上翘的一端移动。
(2)设杠杆的一个小格为L,一个钩码重为G,根据杠杆平衡求出钩码的个数;
分别求出移动后力和力臂乘积的大小,根据两边力和力臂乘积的大小关系,并
判断杠杆那端上翘;
(3)根据力臂的定义作图,根据直角三角形性质:30∘角对应的直角边等于斜边
的一半,求出 F的力臂,然后利用杠杆平衡条件求解。
【解答】
(1)杠杆保持静止,此时杠杆处于静止状态,达到平衡;
由图中,杠杆的右端较高,平衡螺母应向右端移动使杠杆平衡;
(2)设杠杆的一个小格为L,一个钩码重为G,
因为,F l =F l ,
1 1 2 2
所以4G×3L=nG×2L,
所以n=6,所以在B处挂6个钩码;
当杠杆平衡后,将A、B两点下方所挂的钩码同时朝远离支点O的方向各移动
一小格,
F l =4G×4L=16GL,F l =6G×3L=18GL,
1 1 2 2
F l ” 、 “ <” 或 “ =” ), 你 的 依 据 是
1 2
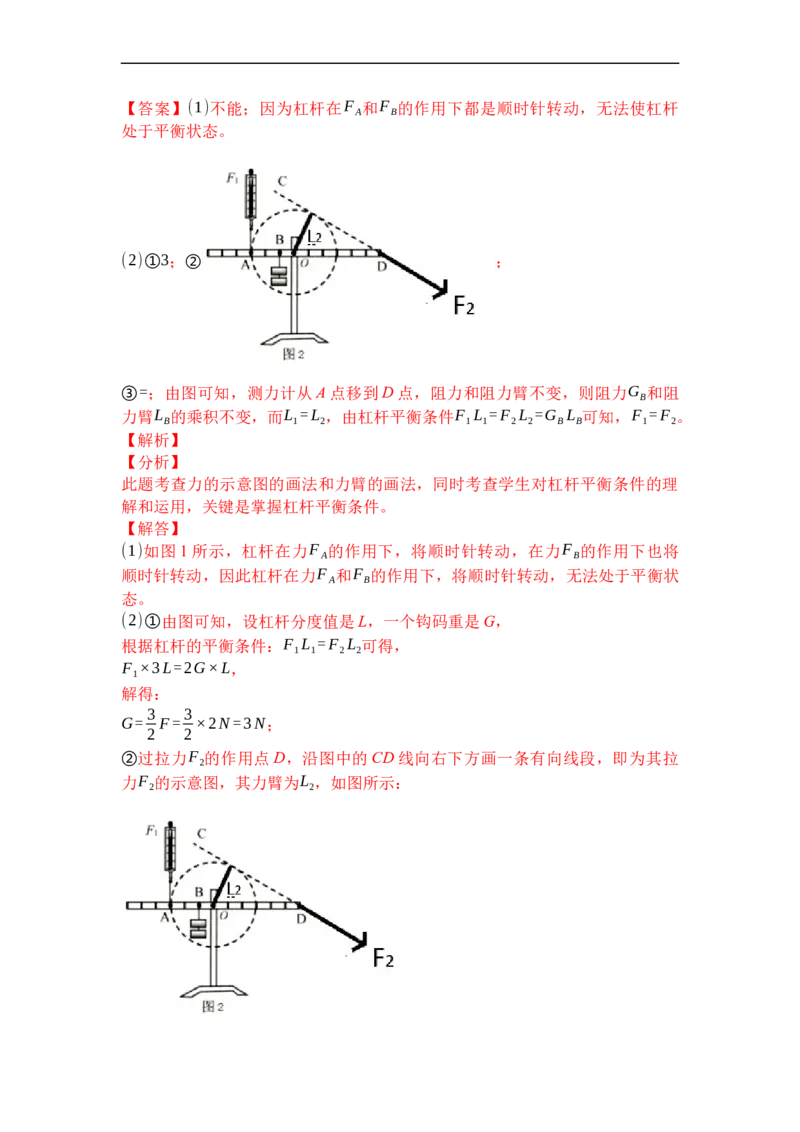
______________________________。【答案】(1)不能;因为杠杆在F 和F 的作用下都是顺时针转动,无法使杠杆
A B
处于平衡状态。
(2)①3;② ;
③=;由图可知,测力计从A点移到D点,阻力和阻力臂不变,则阻力G 和阻
B
力臂L 的乘积不变,而L =L ,由杠杆平衡条件F L =F L =G L 可知,F =F 。
B 1 2 1 1 2 2 B B 1 2
【解析】
【分析】
此题考查力的示意图的画法和力臂的画法,同时考查学生对杠杆平衡条件的理
解和运用,关键是掌握杠杆平衡条件。
【解答】
(1)如图1所示,杠杆在力F 的作用下,将顺时针转动,在力F 的作用下也将
A B
顺时针转动,因此杠杆在力F 和F 的作用下,将顺时针转动,无法处于平衡状
A B
态。
(2)①由图可知,设杠杆分度值是L,一个钩码重是G,
根据杠杆的平衡条件:F L =F L 可得,
1 1 2 2
F ×3L=2G×L,
1
解得:
3 3
G= F= ×2N=3N;
2 2
②过拉力F 的作用点D,沿图中的CD线向右下方画一条有向线段,即为其拉
2
力F 的示意图,其力臂为L ,如图所示:
2 2③由图可知,测力计从A点移到D点,阻力和阻力臂不变,则阻力G 和阻力臂
B
L 的乘积不变,
B
而L =L ,由杠杆平衡条件F L =F L =G L 可知,即F =F 。
1 2 1 1 2 2 B B 1 2
六、计算题
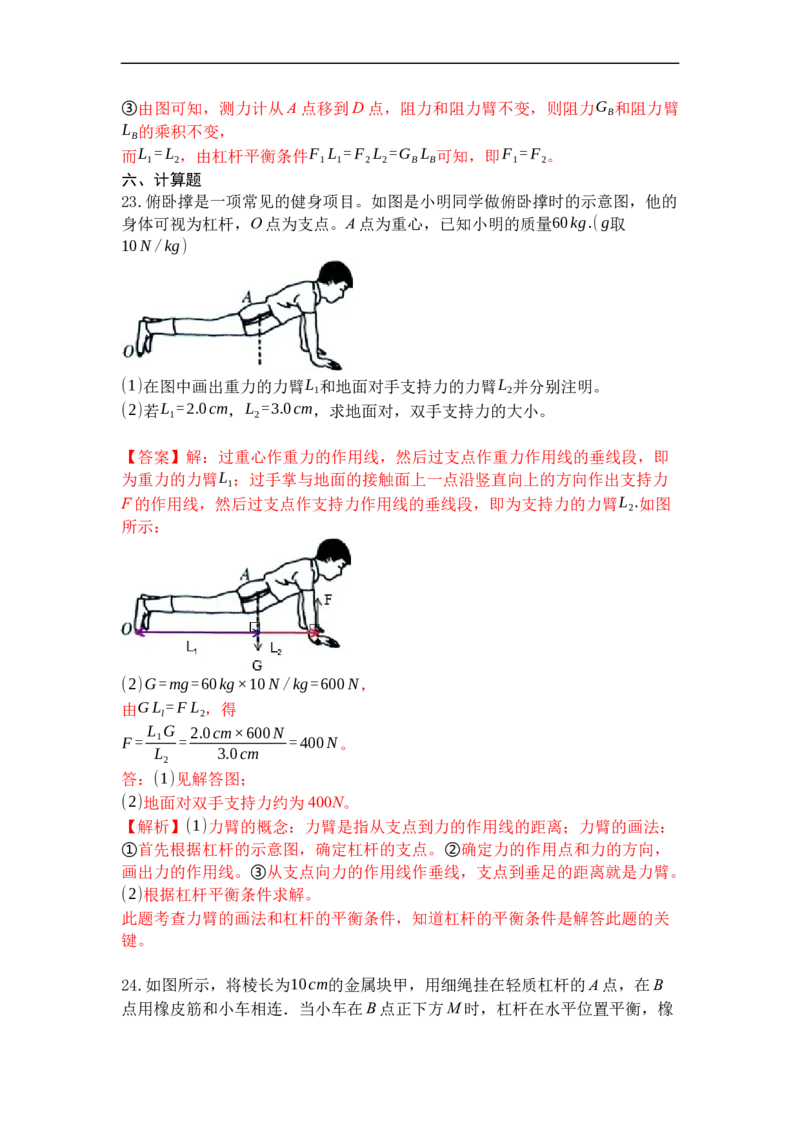
23.俯卧撑是一项常见的健身项目。如图是小明同学做俯卧撑时的示意图,他的
身体可视为杠杆,O点为支点。A点为重心,已知小明的质量60kg.(g取
10N/kg)
(1)在图中画出重力的力臂L 和地面对手支持力的力臂L 并分别注明。
1 2
(2)若L =2.0cm,L =3.0cm,求地面对,双手支持力的大小。
1 2
【答案】解:过重心作重力的作用线,然后过支点作重力作用线的垂线段,即
为重力的力臂L ;过手掌与地面的接触面上一点沿竖直向上的方向作出支持力
1
F的作用线,然后过支点作支持力作用线的垂线段,即为支持力的力臂L .如图
2
所示:
(2)G=mg=60kg×10N/kg=600N,
由GL =FL ,得
l 2
L G 2.0cm×600N
F= 1 = =400N。
L 3.0cm
2
答:(1)见解答图;
(2)地面对双手支持力约为400N。
【解析】(1)力臂的概念:力臂是指从支点到力的作用线的距离;力臂的画法:
①首先根据杠杆的示意图,确定杠杆的支点。②确定力的作用点和力的方向,
画出力的作用线。③从支点向力的作用线作垂线,支点到垂足的距离就是力臂。
(2)根据杠杆平衡条件求解。
此题考查力臂的画法和杠杆的平衡条件,知道杠杆的平衡条件是解答此题的关
键。
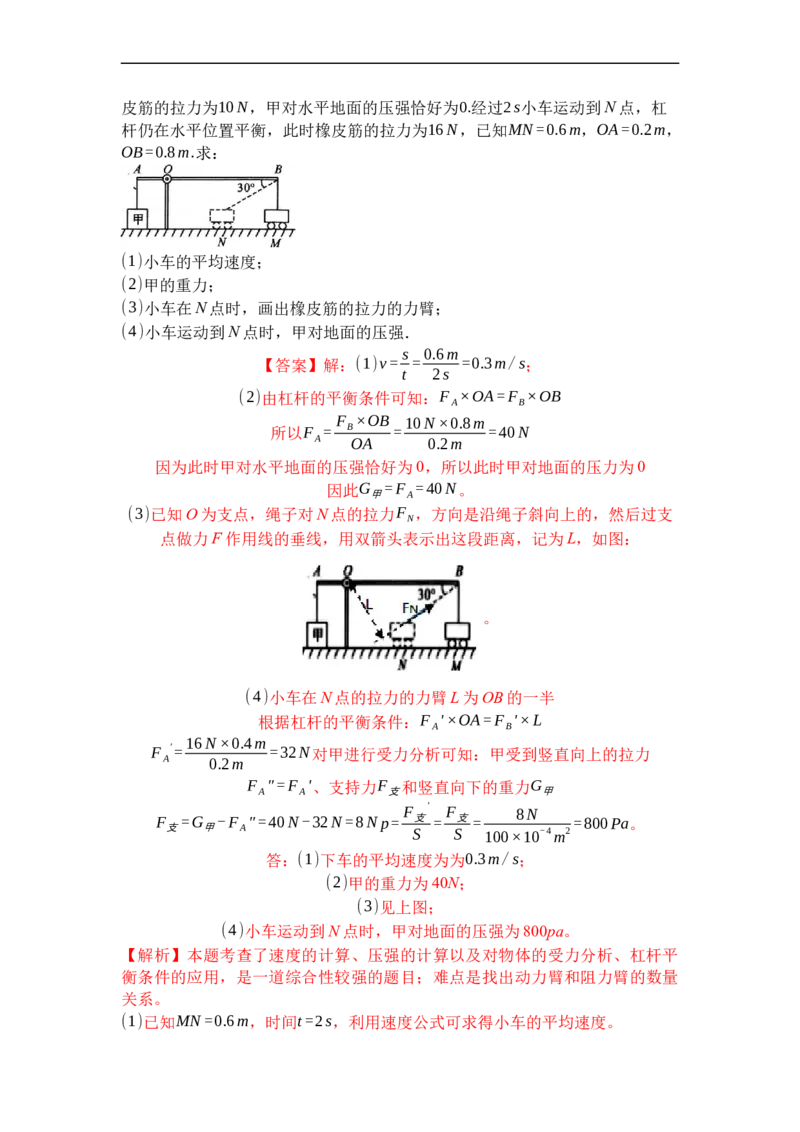
24.如图所示,将棱长为10cm的金属块甲,用细绳挂在轻质杠杆的A点,在B
点用橡皮筋和小车相连.当小车在B点正下方M时,杠杆在水平位置平衡,橡皮筋的拉力为10N,甲对水平地面的压强恰好为0.经过2s小车运动到N点,杠
杆仍在水平位置平衡,此时橡皮筋的拉力为16N,已知MN=0.6m,OA=0.2m,
OB=0.8m.求:
(1)小车的平均速度;
(2)甲的重力;
(3)小车在N点时,画出橡皮筋的拉力的力臂;
(4)小车运动到N点时,甲对地面的压强.
s 0.6m
【答案】解:(1)v= = =0.3m/s;
t 2s
(2)由杠杆的平衡条件可知:F ×OA=F ×OB
A B
F ×OB 10N×0.8m
所以F = B = =40N
A OA 0.2m
因为此时甲对水平地面的压强恰好为0,所以此时甲对地面的压力为0
因此G =F =40N。
甲 A
(3)已知O为支点,绳子对N点的拉力F ,方向是沿绳子斜向上的,然后过支
N
点做力F作用线的垂线,用双箭头表示出这段距离,记为L,如图:
。
(4)小车在N点的拉力的力臂L为OB的一半
根据杠杆的平衡条件:F '×OA=F '×L
A B
16N×0.4m
F '= =32N对甲进行受力分析可知:甲受到竖直向上的拉力
A 0.2m
F ″=F '、支持力F 和竖直向下的重力G
A A 支 甲
F ' F 8N
F =G -F ″=40N-32N=8Np= 支 = 支= =800Pa。
支 甲 A S S 100×10-4m2
答:(1)下车的平均速度为为0.3m/s;
(2)甲的重力为40N;
(3)见上图;
(4)小车运动到N点时,甲对地面的压强为800pa。
【解析】本题考查了速度的计算、压强的计算以及对物体的受力分析、杠杆平
衡条件的应用,是一道综合性较强的题目;难点是找出动力臂和阻力臂的数量
关系。
(1)已知MN=0.6m,时间t=2s,利用速度公式可求得小车的平均速度。(2)已知杠杆在水平位置平衡,橡皮筋的拉力为 16N,甲对水平地面的压强恰好
为0.根据杠杆平衡条件可求得甲的重力。
(3)先确定杆的支点和拉力的方向,然后根据力臂的画法(找出支点,过支点做
这个力作用线的垂线,画出垂足,标上双箭头表示这段距离)做出F的力臂L。
(4)小车运动到N点时,首先利用几何知识求得F 的力臂,再根据杠杆平衡条
B
件可求得F,然后利用压强公式求得甲对地面的压强。
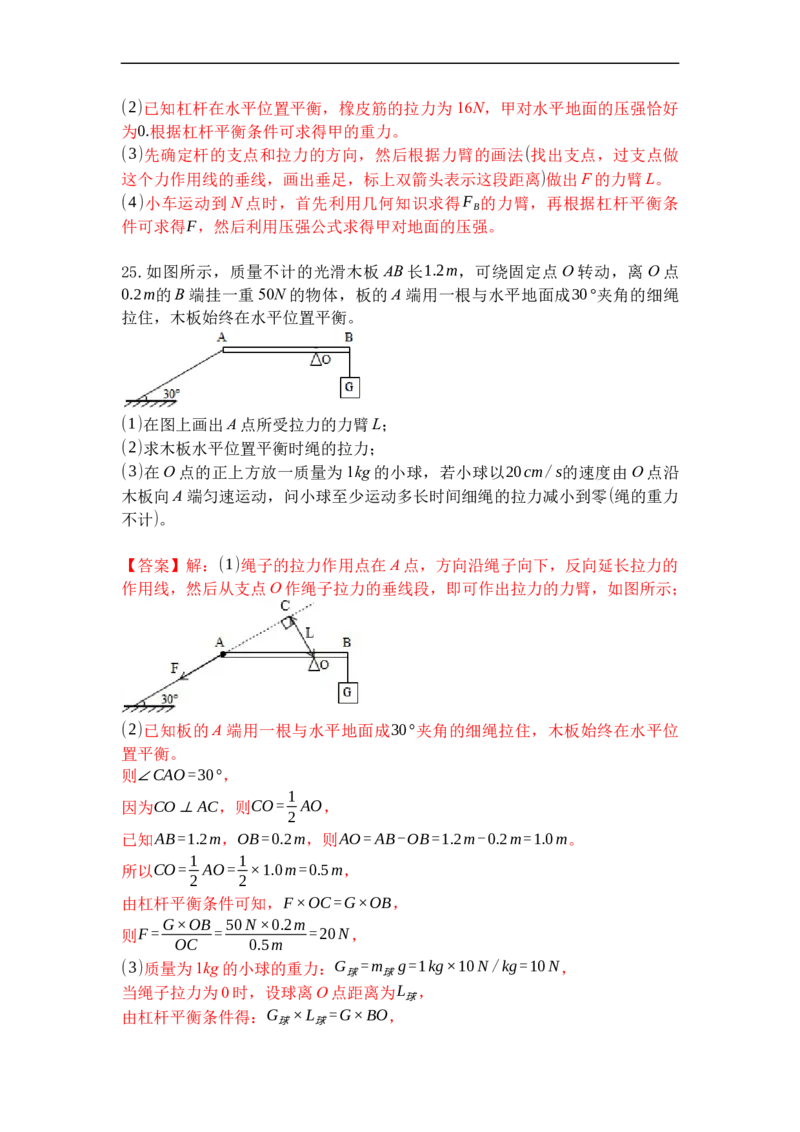
25.如图所示,质量不计的光滑木板 AB长1.2m,可绕固定点O转动,离O点
0.2m的B端挂一重50N的物体,板的A端用一根与水平地面成30°夹角的细绳
拉住,木板始终在水平位置平衡。
(1)在图上画出A点所受拉力的力臂L;
(2)求木板水平位置平衡时绳的拉力;
(3)在O点的正上方放一质量为1kg的小球,若小球以20cm/s的速度由O点沿
木板向A端匀速运动,问小球至少运动多长时间细绳的拉力减小到零(绳的重力
不计)。
【答案】解:(1)绳子的拉力作用点在A点,方向沿绳子向下,反向延长拉力的
作用线,然后从支点O作绳子拉力的垂线段,即可作出拉力的力臂,如图所示;
(2)已知板的A端用一根与水平地面成30°夹角的细绳拉住,木板始终在水平位
置平衡。
则∠CAO=30°,
1
因为CO⊥AC,则CO= AO,
2
已知AB=1.2m,OB=0.2m,则AO=AB-OB=1.2m-0.2m=1.0m。
1 1
所以CO= AO= ×1.0m=0.5m,
2 2
由杠杆平衡条件可知,F×OC=G×OB,
G×OB 50N×0.2m
则F= = =20N,
OC 0.5m
(3)质量为1kg的小球的重力:G =m g=1kg×10N/kg=10N,
球 球
当绳子拉力为0时,设球离O点距离为L ,
球
由杠杆平衡条件得:G ×L =G×BO,
球 球即:10N×L =50N×0.2m,
球
解得:L =1m=100cm,
球
s
由v= 可知,
t
球的运动时间:
L 100cm
t= 球= =5s。
v 20cm/s
球
答:(1)见上图;
(2)木板水平位置平衡时绳的拉力为20N;
(3)小球至少运动5s时间细绳的拉力减小到零。
【解析】(1)作出拉力的示意图,然后从支点作力的作用下的垂线段,即可作出
力的力臂;
(2)已知板的A端用一根与水平地面成30°夹角的细绳拉住,木板始终在水平位
置平衡。根据几何知识可求得L,再利用杠杆平衡条件可求得木板水平位置平
衡时绳的拉力。
(3)当绳的拉力为零时,则杠杆在小球和G的作用下恰好保持平衡,根据杠杆的
平衡条件求出小球对杠杆力的力臂,由速度公式的变形公式可以求出运动时间。
此题考查了力臂的画法、杠杆平衡条件的应用,此题的难度在(3),关键是根据
杠杆平衡条件得出阻力臂与动力臂之比。

