
文档内容
实验 1 力学实验
考点内容 考情分析
考向一 以“测速度”为核心的力学试 力学实验探究题是高考的必考内容,高考对于这部分
验 知识点的命题形式是:根据实验原理,设计实验,正
确处理实验数据,得出实验结论。将考查的知识点延
考向二 其他力学试验 伸到演示实验中,扩展到设计性、应用性等实验。需
要学生能够将所学的实验原理和实验方法知识迁移到
考向三 力学创新实验
情境实验中去。
1.思想方法
1.力学创新型实验的特点
(1)以基本的力学模型为载体,依托运动学规律和力学定律设计实验.
(2)将实验的基本方法——控制变量法,处理数据的基本方法——图象法、逐差法,融入到实验的综
合分析之中.
2.创新实验题的解法
(1)根据题目情境,提取相应的力学模型,明确实验的理论依据和实验目的,设计实验方案.
(2)进行实验,记录数据,应用原理公式或图象法处理实验数据,结合物体实际受力情况和理论受力
情况对结果进行误差分析.
2.模型建构
一、力学基本仪器的使用与读数
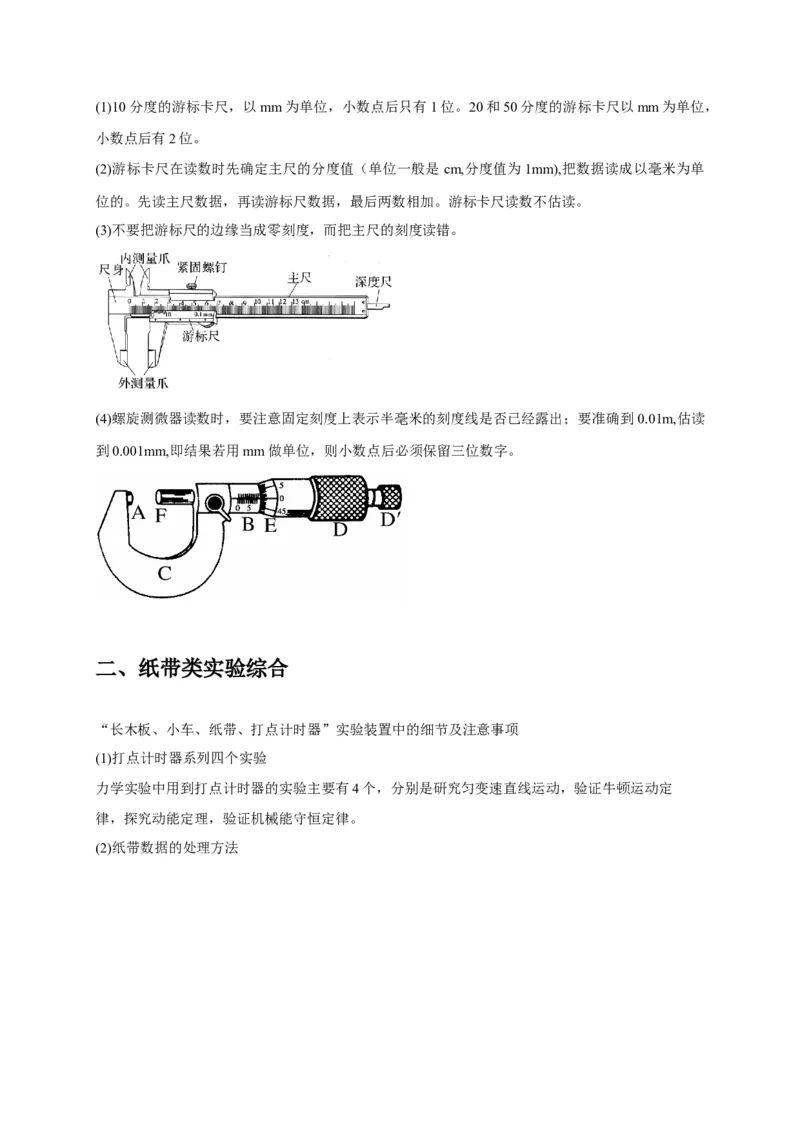
游标卡尺和螺旋测微器读数时应注意的问题(1)10分度的游标卡尺,以mm为单位,小数点后只有1位。20和50分度的游标卡尺以mm为单位,
小数点后有2位。
(2)游标卡尺在读数时先确定主尺的分度值(单位一般是 cm,分度值为1mm),把数据读成以毫米为单
位的。先读主尺数据,再读游标尺数据,最后两数相加。游标卡尺读数不估读。
(3)不要把游标尺的边缘当成零刻度,而把主尺的刻度读错。
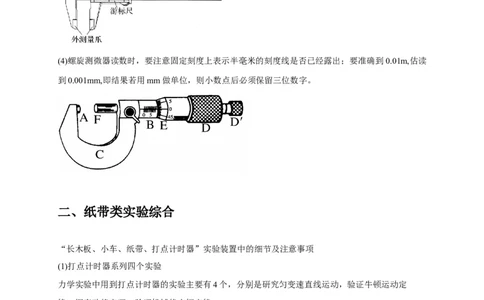
(4)螺旋测微器读数时,要注意固定刻度上表示半毫米的刻度线是否已经露出;要准确到0.01m,估读
到0.001mm,即结果若用mm做单位,则小数点后必须保留三位数字。
二、纸带类实验综合
“长木板、小车、纸带、打点计时器”实验装置中的细节及注意事项
(1)打点计时器系列四个实验
力学实验中用到打点计时器的实验主要有4个,分别是研究匀变速直线运动,验证牛顿运动定
律,探究动能定理,验证机械能守恒定律。
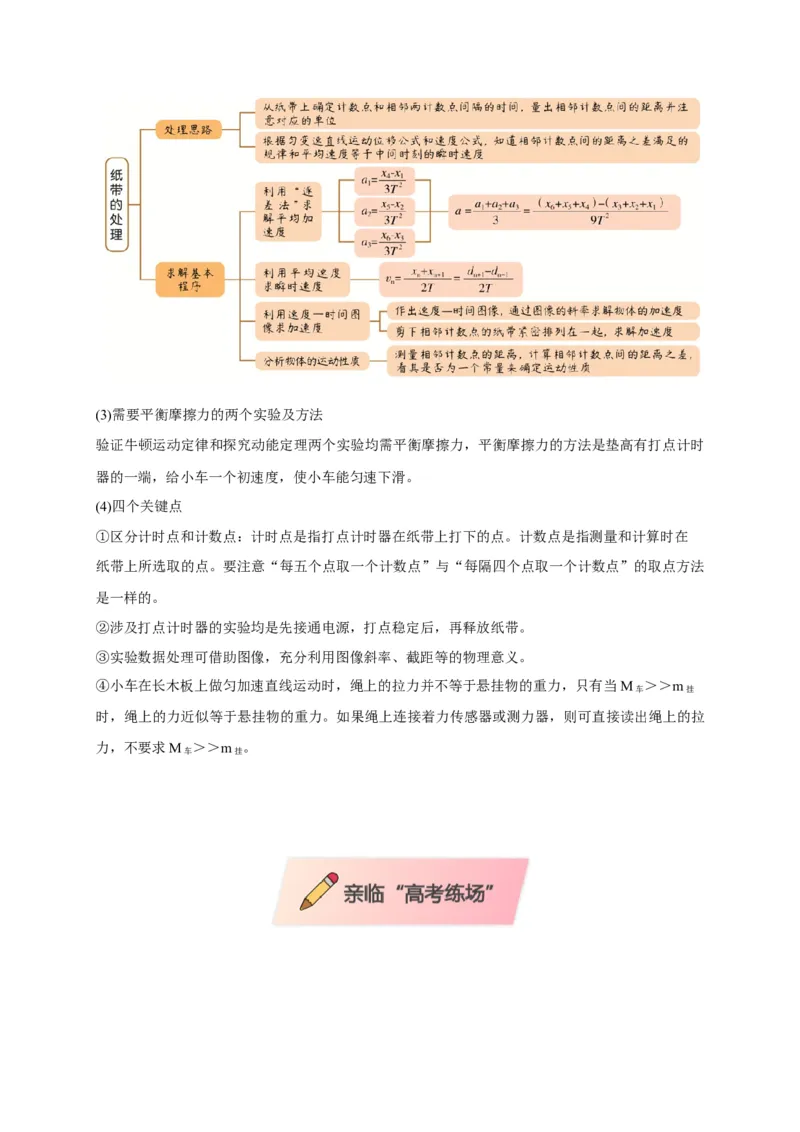
(2)纸带数据的处理方法(3)需要平衡摩擦力的两个实验及方法
验证牛顿运动定律和探究动能定理两个实验均需平衡摩擦力,平衡摩擦力的方法是垫高有打点计时
器的一端,给小车一个初速度,使小车能匀速下滑。
(4)四个关键点
①区分计时点和计数点:计时点是指打点计时器在纸带上打下的点。计数点是指测量和计算时在
纸带上所选取的点。要注意“每五个点取一个计数点”与“每隔四个点取一个计数点”的取点方法
是一样的。
②涉及打点计时器的实验均是先接通电源,打点稳定后,再释放纸带。
③实验数据处理可借助图像,充分利用图像斜率、截距等的物理意义。
④小车在长木板上做匀加速直线运动时,绳上的拉力并不等于悬挂物的重力,只有当M >>m
车 挂
时,绳上的力近似等于悬挂物的重力。如果绳上连接着力传感器或测力器,则可直接读出绳上的拉
力,不要求M >>m 。
车 挂考向一 以“测速度”为核心的力学试验
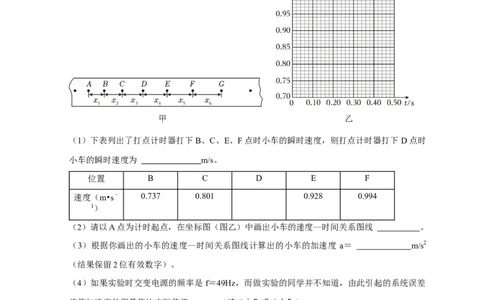
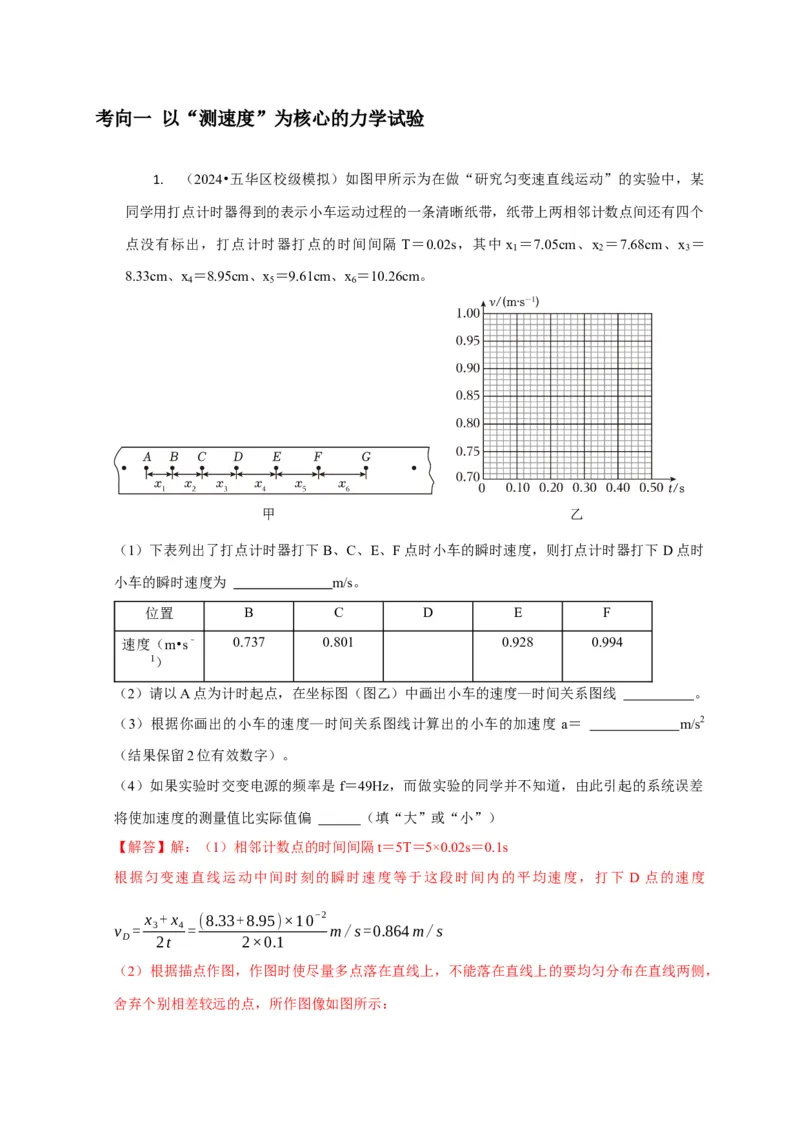
1. (2024•五华区校级模拟)如图甲所示为在做“研究匀变速直线运动”的实验中,某
同学用打点计时器得到的表示小车运动过程的一条清晰纸带,纸带上两相邻计数点间还有四个
点没有标出,打点计时器打点的时间间隔 T=0.02s,其中x =7.05cm、x =7.68cm、x =
1 2 3
8.33cm、x =8.95cm、x =9.61cm、x =10.26cm。
4 5 6
(1)下表列出了打点计时器打下B、C、E、F点时小车的瞬时速度,则打点计时器打下 D点时
小车的瞬时速度为 m/s。
位置 B C D E F
速度(m•s﹣ 0.737 0.801 0.928 0.994
1)
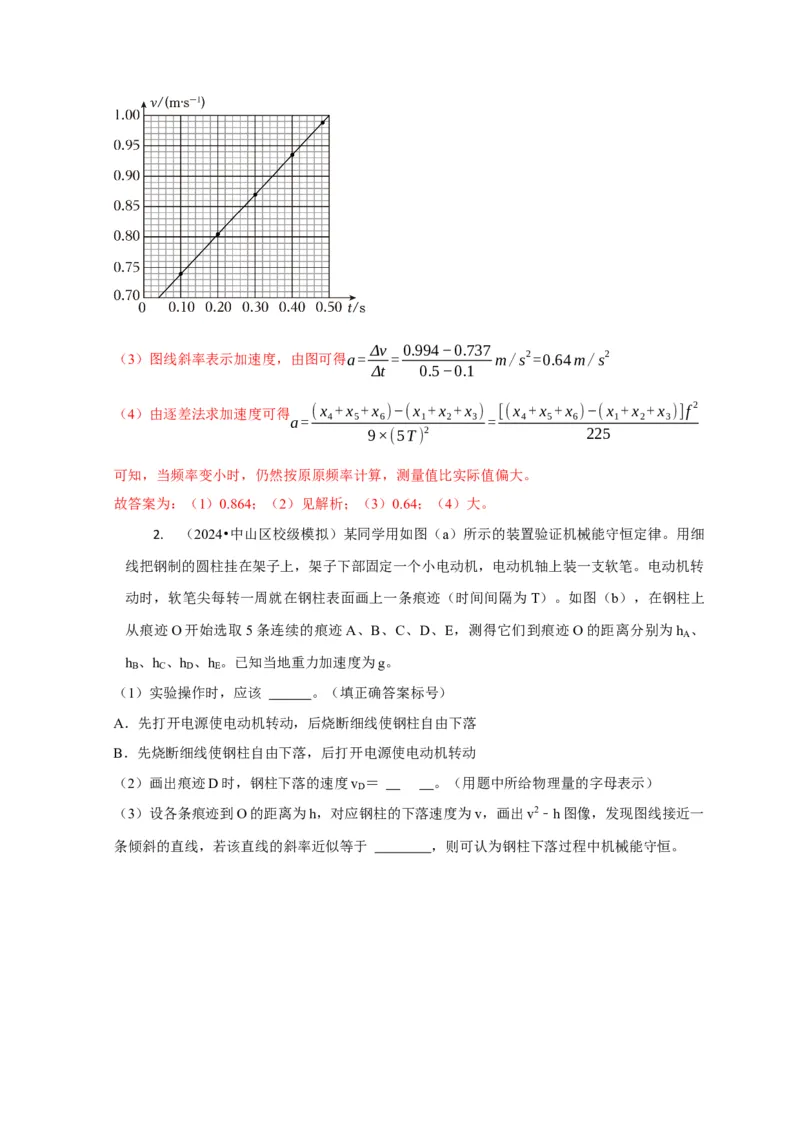
(2)请以A点为计时起点,在坐标图(图乙)中画出小车的速度—时间关系图线 。
(3)根据你画出的小车的速度—时间关系图线计算出的小车的加速度 a= m/s2
(结果保留2位有效数字)。
(4)如果实验时交变电源的频率是f=49Hz,而做实验的同学并不知道,由此引起的系统误差
将使加速度的测量值比实际值偏 (填“大”或“小”)
【解答】解:(1)相邻计数点的时间间隔t=5T=5×0.02s=0.1s
根据匀变速直线运动中间时刻的瞬时速度等于这段时间内的平均速度,打下 D 点的速度
x +x (8.33+8.95)×10−2
v = 3 4= m/s=0.864m/s
D 2t 2×0.1
(2)根据描点作图,作图时使尽量多点落在直线上,不能落在直线上的要均匀分布在直线两侧,
舍弃个别相差较远的点,所作图像如图所示:Δv 0.994−0.737
(3)图线斜率表示加速度,由图可得a= = m/s2=0.64m/s2
Δt 0.5−0.1
(4)由逐差法求加速度可得 (x +x +x )−(x +x +x ) [(x +x +x )−(x +x +x )]f2
a= 4 5 6 1 2 3 = 4 5 6 1 2 3
9×(5T) 2 225
可知,当频率变小时,仍然按原原频率计算,测量值比实际值偏大。
故答案为:(1)0.864;(2)见解析;(3)0.64;(4)大。
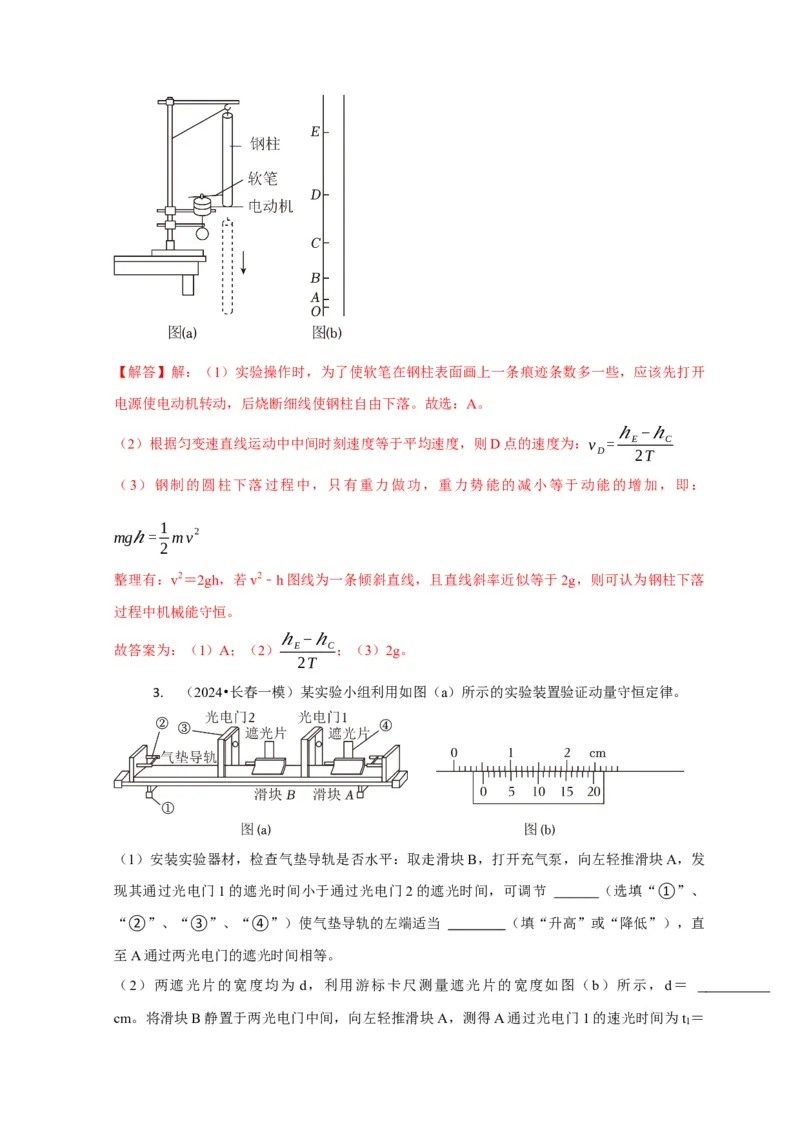
2. (2024•中山区校级模拟)某同学用如图(a)所示的装置验证机械能守恒定律。用细
线把钢制的圆柱挂在架子上,架子下部固定一个小电动机,电动机轴上装一支软笔。电动机转
动时,软笔尖每转一周就在钢柱表面画上一条痕迹(时间间隔为T)。如图(b),在钢柱上
从痕迹O开始选取5条连续的痕迹A、B、C、D、E,测得它们到痕迹O的距离分别为h 、
A
h 、h 、h 、h 。已知当地重力加速度为g。
B C D E
(1)实验操作时,应该 。(填正确答案标号)
A.先打开电源使电动机转动,后烧断细线使钢柱自由下落
B.先烧断细线使钢柱自由下落,后打开电源使电动机转动
(2)画出痕迹D时,钢柱下落的速度v = 。(用题中所给物理量的字母表示)
D
(3)设各条痕迹到O的距离为h,对应钢柱的下落速度为v,画出v2﹣h图像,发现图线接近一
条倾斜的直线,若该直线的斜率近似等于 ,则可认为钢柱下落过程中机械能守恒。【解答】解:(1)实验操作时,为了使软笔在钢柱表面画上一条痕迹条数多一些,应该先打开
电源使电动机转动,后烧断细线使钢柱自由下落。故选:A。
ℎ −ℎ
(2)根据匀变速直线运动中中间时刻速度等于平均速度,则D点的速度为:v = E C
D 2T
(3)钢制的圆柱下落过程中,只有重力做功,重力势能的减小等于动能的增加,即:
1
mgℎ = mv2
2
整理有:v2=2gh,若v2﹣h图线为一条倾斜直线,且直线斜率近似等于2g,则可认为钢柱下落
过程中机械能守恒。
ℎ −ℎ
故答案为:(1)A;(2) E C;(3)2g。
2T
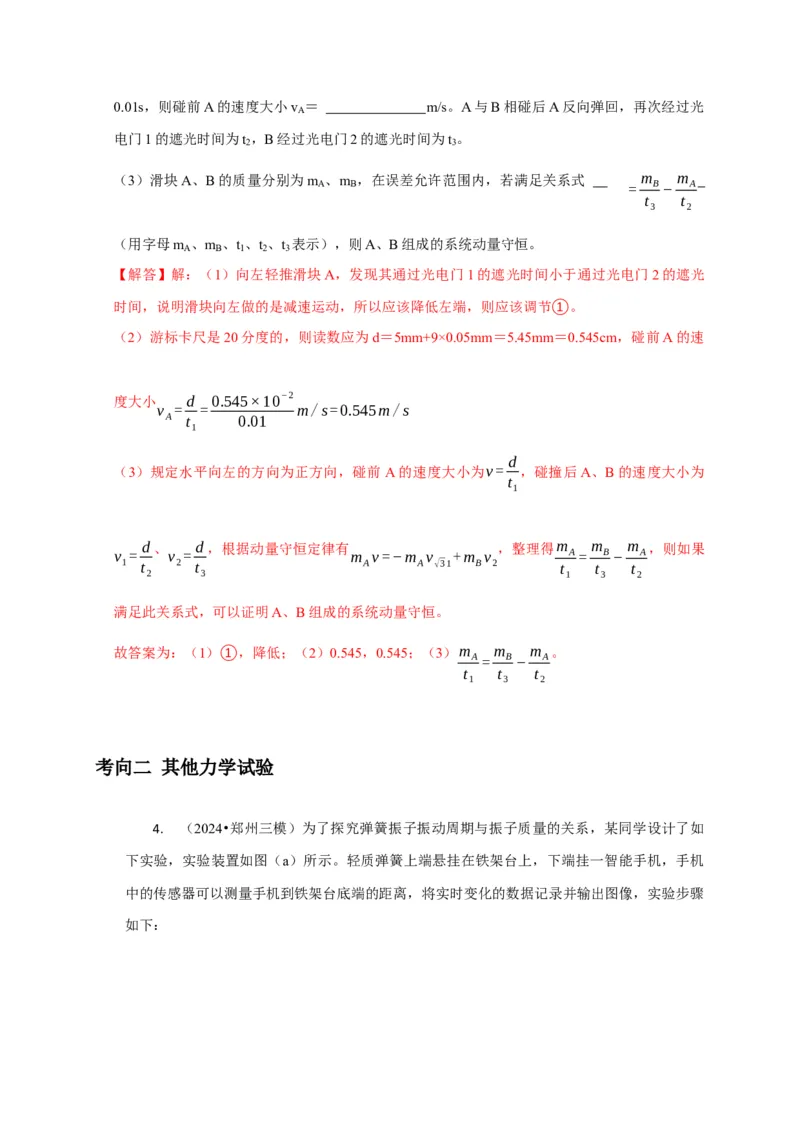
3. (2024•长春一模)某实验小组利用如图(a)所示的实验装置验证动量守恒定律。
(1)安装实验器材,检查气垫导轨是否水平:取走滑块B,打开充气泵,向左轻推滑块A,发
现其通过光电门1的遮光时间小于通过光电门2的遮光时间,可调节 (选填“①”、
“②”、“③”、“④”)使气垫导轨的左端适当 (填“升高”或“降低”),直
至A通过两光电门的遮光时间相等。
(2)两遮光片的宽度均为 d,利用游标卡尺测量遮光片的宽度如图(b)所示,d=
cm。将滑块B静置于两光电门中间,向左轻推滑块A,测得A通过光电门1的速光时间为t =
10.01s,则碰前A的速度大小v = m/s。A与B相碰后A反向弹回,再次经过光
A
电门1的遮光时间为t ,B经过光电门2的遮光时间为t 。
2 3
(3)滑块A、B的质量分别为m 、m ,在误差允许范围内,若满足关系式 m m
A B = B− A
t t
3 2
(用字母m 、m 、t 、t 、t 表示),则A、B组成的系统动量守恒。
A B 1 2 3
【解答】解:(1)向左轻推滑块A,发现其通过光电门1的遮光时间小于通过光电门2的遮光
时间,说明滑块向左做的是减速运动,所以应该降低左端,则应该调节①。
(2)游标卡尺是20分度的,则读数应为d=5mm+9×0.05mm=5.45mm=0.545cm,碰前A的速
度大小 d 0.545×10−2
v = = m/s=0.545m/s
A t 0.01
1
d
(3)规定水平向左的方向为正方向,碰前 A的速度大小为v= ,碰撞后A、B的速度大小为
t
1
d、 d,根据动量守恒定律有 ,整理得m m m ,则如果
v = v = m v=−m v +m v A = B− A
1 t 2 t A A √31 B 2 t t t
2 3 1 3 2
满足此关系式,可以证明A、B组成的系统动量守恒。
故答案为:(1)①,降低;(2)0.545,0.545;(3)m m m 。
A = B− A
t t t
1 3 2
考向二 其他力学试验
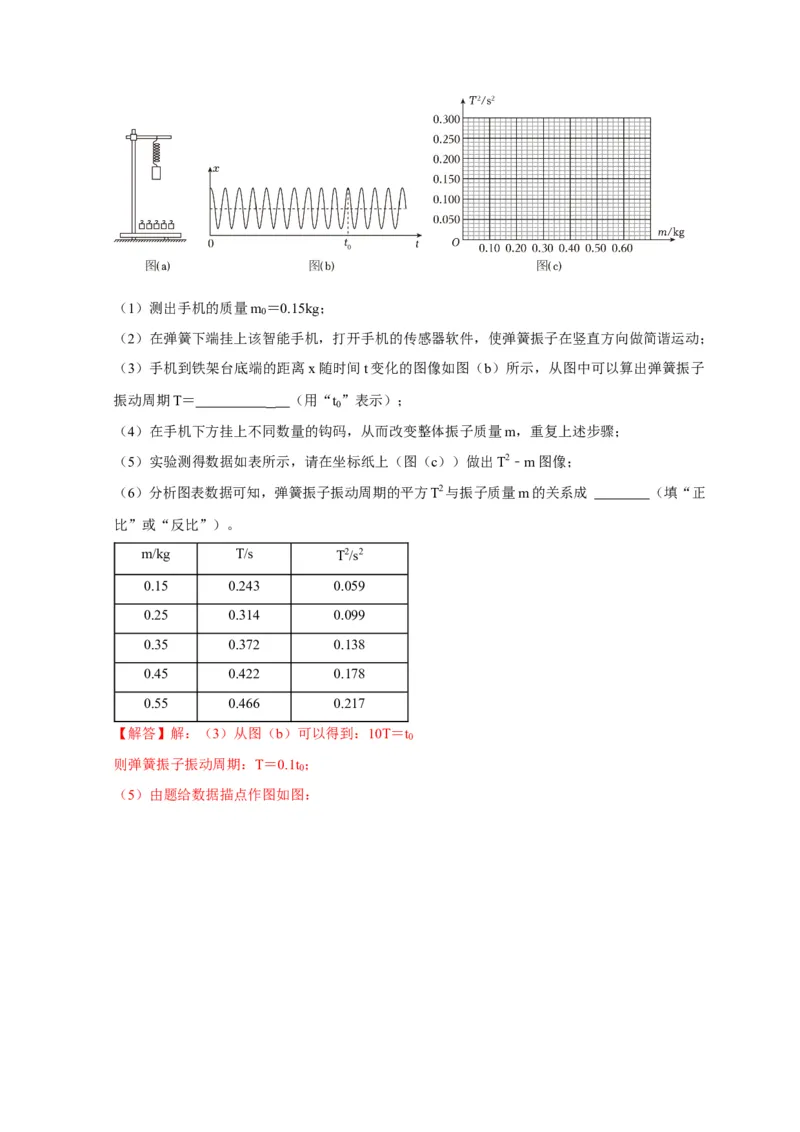
4. (2024•郑州三模)为了探究弹簧振子振动周期与振子质量的关系,某同学设计了如
下实验,实验装置如图(a)所示。轻质弹簧上端悬挂在铁架台上,下端挂一智能手机,手机
中的传感器可以测量手机到铁架台底端的距离,将实时变化的数据记录并输出图像,实验步骤
如下:(1)测出手机的质量m =0.15kg;
0
(2)在弹簧下端挂上该智能手机,打开手机的传感器软件,使弹簧振子在竖直方向做简谐运动;
(3)手机到铁架台底端的距离x随时间t变化的图像如图(b)所示,从图中可以算出弹簧振子
振动周期T= (用“t
0
”表示);
(4)在手机下方挂上不同数量的钩码,从而改变整体振子质量m,重复上述步骤;
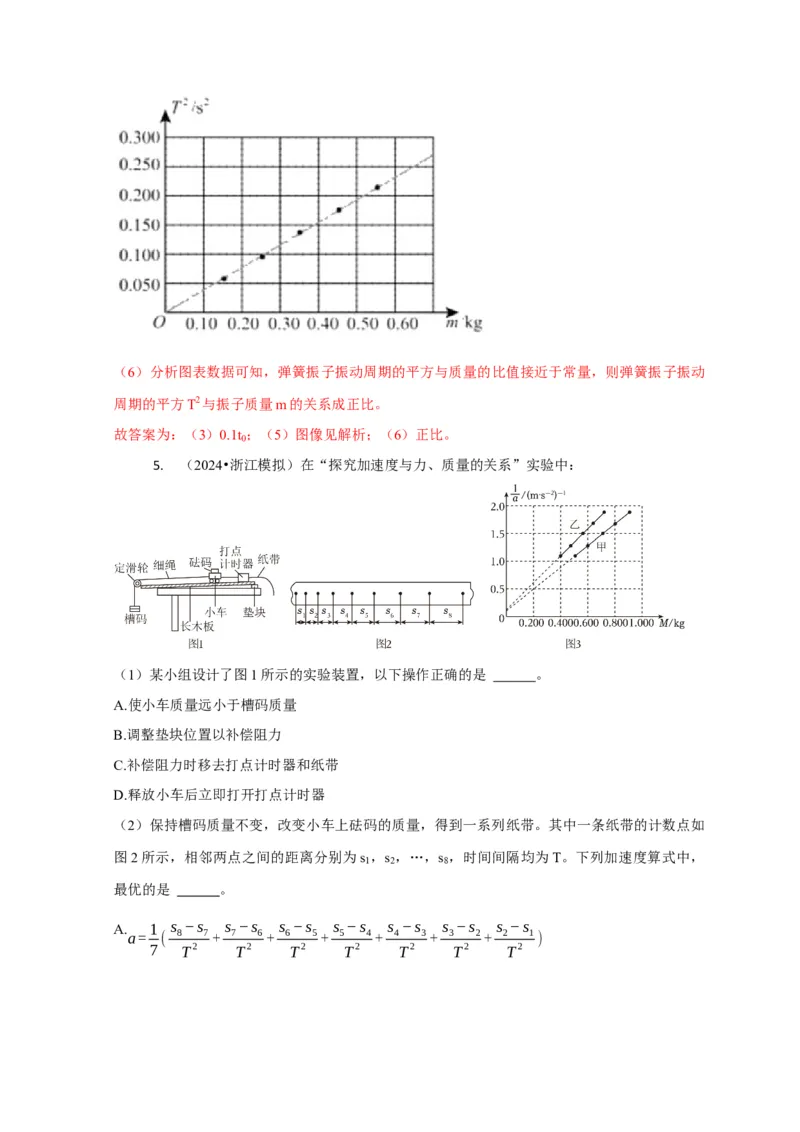
(5)实验测得数据如表所示,请在坐标纸上(图(c))做出T2﹣m图像;
(6)分析图表数据可知,弹簧振子振动周期的平方T2与振子质量m的关系成 (填“正
比”或“反比”)。
m/kg T/s T2/s2
0.15 0.243 0.059
0.25 0.314 0.099
0.35 0.372 0.138
0.45 0.422 0.178
0.55 0.466 0.217
【解答】解:(3)从图(b)可以得到:10T=t
0
则弹簧振子振动周期:T=0.1t ;
0
(5)由题给数据描点作图如图:(6)分析图表数据可知,弹簧振子振动周期的平方与质量的比值接近于常量,则弹簧振子振动
周期的平方T2与振子质量m的关系成正比。
故答案为:(3)0.1t ;(5)图像见解析;(6)正比。
0
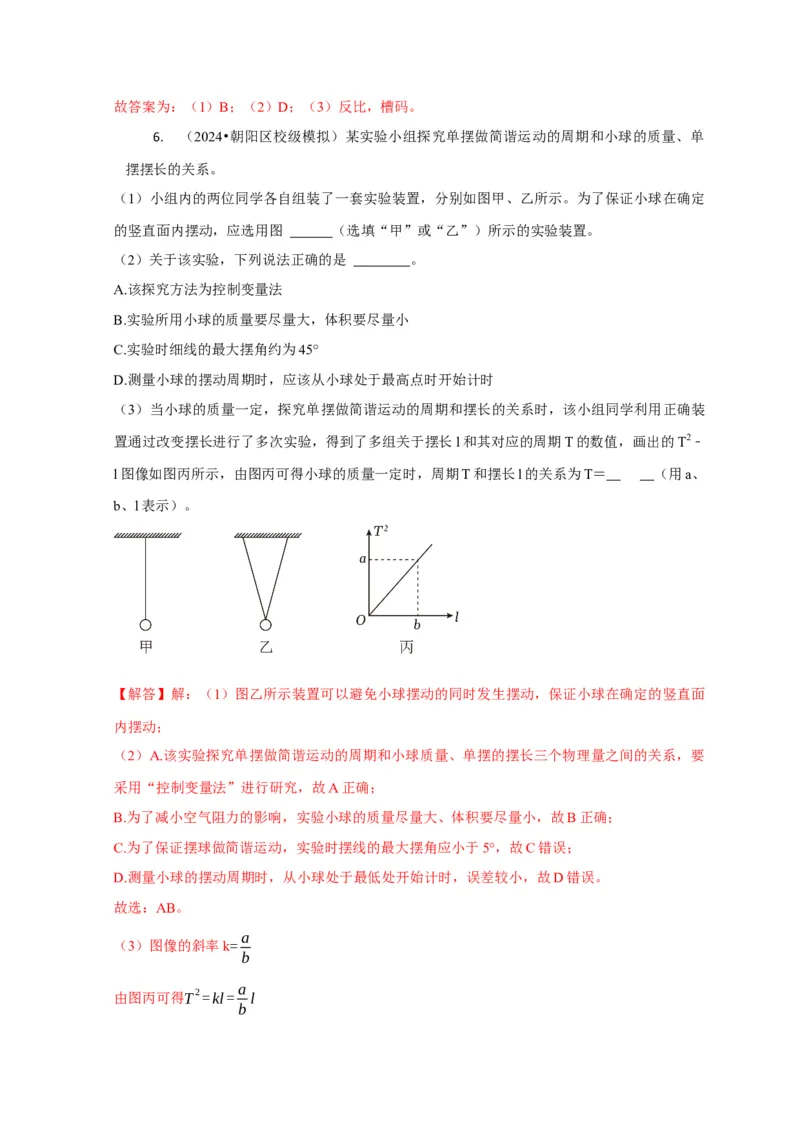
5. (2024•浙江模拟)在“探究加速度与力、质量的关系”实验中:
(1)某小组设计了图1所示的实验装置,以下操作正确的是 。
A.使小车质量远小于槽码质量
B.调整垫块位置以补偿阻力
C.补偿阻力时移去打点计时器和纸带
D.释放小车后立即打开打点计时器
(2)保持槽码质量不变,改变小车上砝码的质量,得到一系列纸带。其中一条纸带的计数点如
图2所示,相邻两点之间的距离分别为s ,s ,…,s ,时间间隔均为T。下列加速度算式中,
1 2 8
最优的是 。
A. 1 s −s s −s s −s s −s s −s s −s s −s
a= ( 8 7+ 7 6+ 6 5+ 5 4+ 4 3+ 3 2+ 2 1 )
7 T2 T2 T2 T2 T2 T2 T2B. 1 s −s s −s s −s s −s s −s s −s
a= ( 8 6+ 7 5+ 6 4+ 5 3+ 4 2+ 3 1 )
6 2T2 2T2 2T2 2T2 2T2 2T2
C. 1 s −s s −s s −s s −s s −s
a= ( 8 5+ 7 4+ 6 3+ 5 2+ 4 1 )
5 3T2 3T2 3T2 3T2 3T2
D. 1 s −s s −s s −s s −s
a= ( 8 4+ 7 3+ 6 2+ 5 1 )
4 4T2 4T2 4T2 4T2
1
(3)以小车和砝码的总质量M为横坐标,加速度的倒数 为纵坐标,甲、乙两组同学分别得到
a
1
的 −M图像如图3所示。由图可知,在所受外力一定的条件下,a与M成 (填“正
a
比”或“反比”);甲组所用的 (填“小车”、“砝码”或“槽码”)质量比乙组的
更大。
【解答】解:(1)A、因为此装置无法测量细绳上的拉力,所以需要满足小车的质量远大于槽
码的质量,故A错误;
B、为了让小车所受拉力等于小车所受阻力,所以需要平衡摩擦,即调整垫块的位置以补偿阻力,
故B正确;
C、补偿阻力时应该让小车带着纸带运动,当打点计时器打下的点迹均匀时才能说明平衡好摩擦
了,故C错误;
D、应该先接通电源,打开打点计时器,待打点稳定后才释放小车,故D错误;
故选:B。
(2)ABC当中的计算式通分相加后,只能利用其中的两组数据,不能把全部的数据都利用上,
增大了实验误差的偶然性,只有D组的计算式把8组数据都利用了,就减小了实验误差的偶然
性,故ABC错误,D正确。
故选:D。
1 1
(3)由图像可知 与M成正比,即 =kM,则a•M是一个定值,所以a与M成反比,设槽码
a a
1 1
的质量为m,根据牛顿第二定律有mg=Ma,整理得 = M,所以图像的斜率表示槽码所受
a mg
重力的倒数,由图可知,乙组的斜率较大,甲组的斜率小,所以甲组所用槽码的质量大于乙组
所用槽码的质量。故答案为:(1)B;(2)D;(3)反比,槽码。
6. (2024•朝阳区校级模拟)某实验小组探究单摆做简谐运动的周期和小球的质量、单
摆摆长的关系。
(1)小组内的两位同学各自组装了一套实验装置,分别如图甲、乙所示。为了保证小球在确定
的竖直面内摆动,应选用图 (选填“甲”或“乙”)所示的实验装置。
(2)关于该实验,下列说法正确的是 。
A.该探究方法为控制变量法
B.实验所用小球的质量要尽量大,体积要尽量小
C.实验时细线的最大摆角约为45°
D.测量小球的摆动周期时,应该从小球处于最高点时开始计时
(3)当小球的质量一定,探究单摆做简谐运动的周期和摆长的关系时,该小组同学利用正确装
置通过改变摆长进行了多次实验,得到了多组关于摆长l和其对应的周期T的数值,画出的T2﹣
l图像如图丙所示,由图丙可得小球的质量一定时,周期T和摆长l的关系为T= (用a、
b、l表示)。
【解答】解:(1)图乙所示装置可以避免小球摆动的同时发生摆动,保证小球在确定的竖直面
内摆动;
(2)A.该实验探究单摆做简谐运动的周期和小球质量、单摆的摆长三个物理量之间的关系,要
采用“控制变量法”进行研究,故A正确;
B.为了减小空气阻力的影响,实验小球的质量尽量大、体积要尽量小,故B正确;
C.为了保证摆球做简谐运动,实验时摆线的最大摆角应小于5°,故C错误;
D.测量小球的摆动周期时,从小球处于最低处开始计时,误差较小,故D错误。
故选:AB。
a
(3)图像的斜率k=
b
a
由图丙可得T2=kl= l
b√abl
化简得T=
b
√abl
故答案为:(1)乙;(2)AB;(3) 。
b
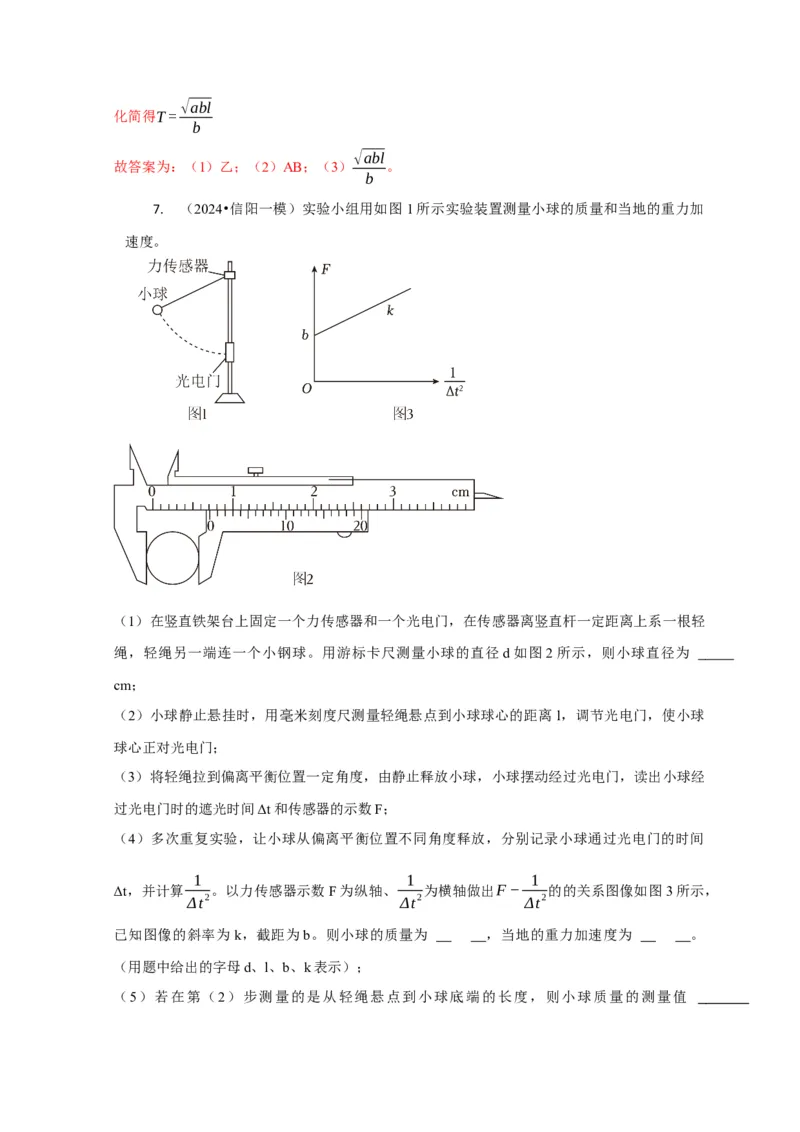
7. (2024•信阳一模)实验小组用如图1所示实验装置测量小球的质量和当地的重力加
速度。
(1)在竖直铁架台上固定一个力传感器和一个光电门,在传感器离竖直杆一定距离上系一根轻
绳,轻绳另一端连一个小钢球。用游标卡尺测量小球的直径d如图2所示,则小球直径为
cm;
(2)小球静止悬挂时,用毫米刻度尺测量轻绳悬点到小球球心的距离 l,调节光电门,使小球
球心正对光电门;
(3)将轻绳拉到偏离平衡位置一定角度,由静止释放小球,小球摆动经过光电门,读出小球经
过光电门时的遮光时间Δt和传感器的示数F;
(4)多次重复实验,让小球从偏离平衡位置不同角度释放,分别记录小球通过光电门的时间
1 1 1
Δt,并计算 。以力传感器示数F为纵轴、 为横轴做出F− 的的关系图像如图3所示,
Δt2 Δt2 Δt2
已知图像的斜率为k,截距为b。则小球的质量为 ,当地的重力加速度为 。
(用题中给出的字母d、l、b、k表示);
(5)若在第(2)步测量的是从轻绳悬点到小球底端的长度,则小球质量的测量值(选填“偏大”、“不变”、“偏小”),重力加速度测量值 (选填“偏大”、“不
变”、“偏小”)。
【解答】解:(1)游标卡尺的精确值为0.05mm,由图可知小球直径为d=7mm+3×0.05mm=
7.15mm=0.715cm
(4)小球经过光电门时的速度大小为
d
v=
Δt
v2
根据牛顿第二定律有F−mg=m
l
md2 1 2
整理得F= ⋅( ) +mg
l Δt
md2
由b=mg,k=
l
kl bd2
解得m= ,g=
d2 kl
(5)测量的是从轻绳悬点到小球底端的长度,则 l取值偏大,可知小球质量m的测量值偏大,
重力加速度g的测量值偏小。
kl bd2
故答案为:(1)0.715;(4) ; ;(5)偏大;偏小
d2 kl
考向三 力学创新实验
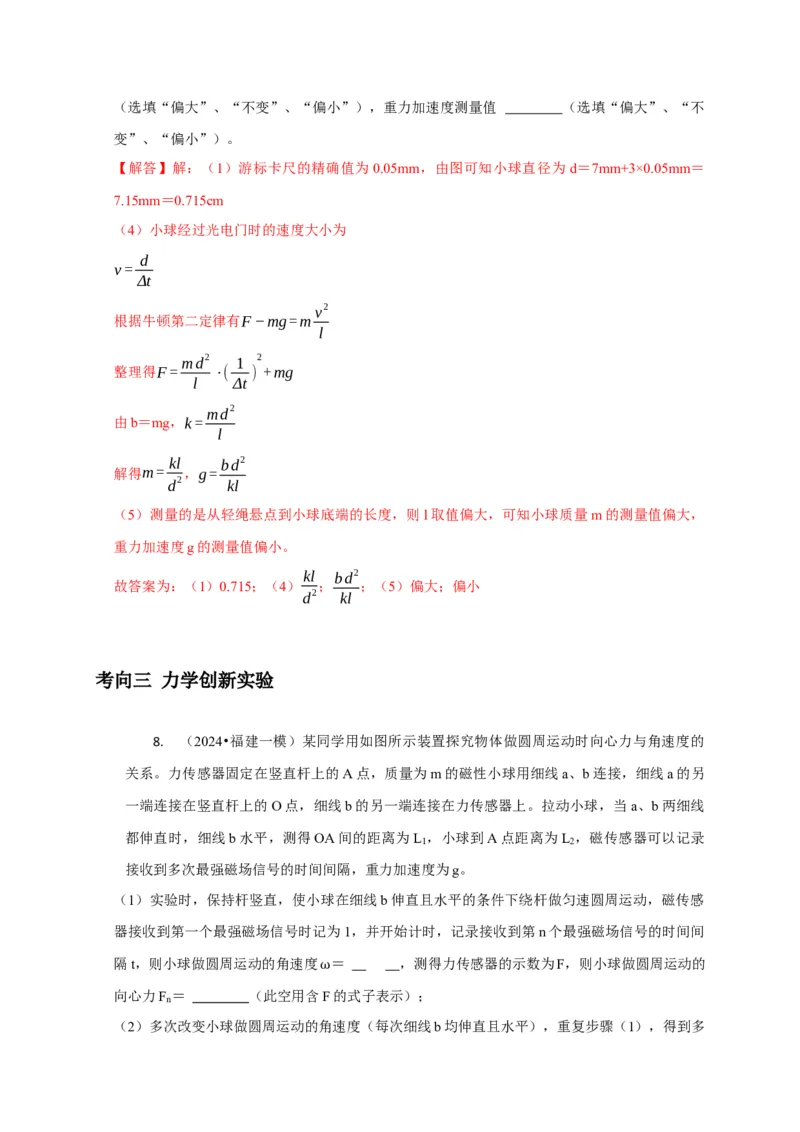
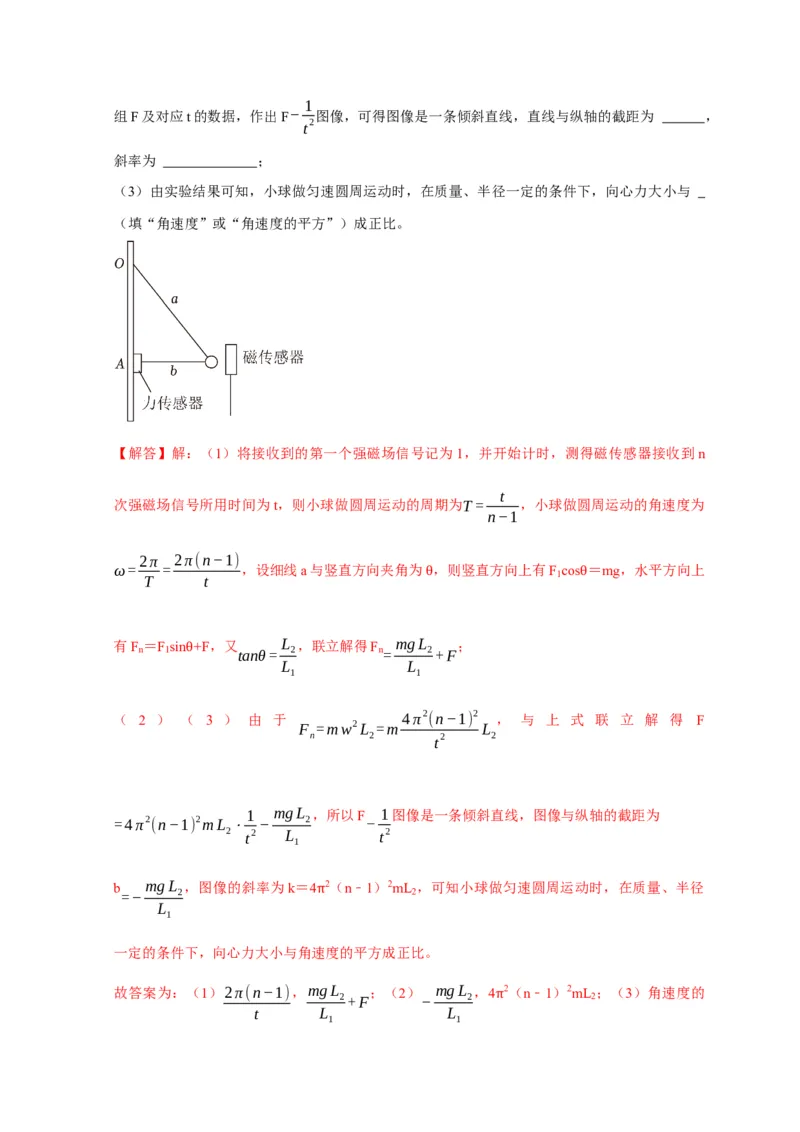
8. (2024•福建一模)某同学用如图所示装置探究物体做圆周运动时向心力与角速度的
关系。力传感器固定在竖直杆上的A点,质量为m的磁性小球用细线a、b连接,细线a的另
一端连接在竖直杆上的O点,细线b的另一端连接在力传感器上。拉动小球,当 a、b两细线
都伸直时,细线b水平,测得OA间的距离为L ,小球到A点距离为L ,磁传感器可以记录
1 2
接收到多次最强磁场信号的时间间隔,重力加速度为g。
(1)实验时,保持杆竖直,使小球在细线b伸直且水平的条件下绕杆做匀速圆周运动,磁传感
器接收到第一个最强磁场信号时记为1,并开始计时,记录接收到第n个最强磁场信号的时间间
隔t,则小球做圆周运动的角速度 = ,测得力传感器的示数为F,则小球做圆周运动的
向心力F = (此空用含ωF的式子表示);
n
(2)多次改变小球做圆周运动的角速度(每次细线b均伸直且水平),重复步骤(1),得到多1
组F及对应t的数据,作出F− 图像,可得图像是一条倾斜直线,直线与纵轴的截距为 ,
t2
斜率为 ;
(3)由实验 结 果可知,小球做匀速圆周运动时,在质量、半径一定的条件下,向心力大小与
(填“角速度”或“角速度的平方”)成正比。
【解答】解:(1)将接收到的第一个强磁场信号记为1,并开始计时,测得磁传感器接收到n
t
次强磁场信号所用时间为t,则小球做圆周运动的周期为T= ,小球做圆周运动的角速度为
n−1
2π 2π(n−1)
ω= = ,设细线a与竖直方向夹角为 ,则竖直方向上有F cos =mg,水平方向上
1
T t
θ θ
有F =F sin +F,又 L ,联立解得F mgL ;
n 1 tanθ= 2 n= 2+F
L L
θ 1 1
( 2 ) ( 3 ) 由 于 4π2 (n−1) 2 , 与 上 式 联 立 解 得 F
F =mw2L =m L
n 2 t2 2
1 mgL ,所以F 1图像是一条倾斜直线,图像与纵轴的截距为
=4π2 (n−1) 2mL ⋅ − 2 −
2 t2 L t2
1
b mgL ,图像的斜率为k=4 2(n﹣1)2mL ,可知小球做匀速圆周运动时,在质量、半径
=− 2 2
L
1 π
一定的条件下,向心力大小与角速度的平方成正比。
故答案为:(1)2π(n−1),mgL ;(2) mgL ,4 2(n﹣1)2mL ;(3)角速度的
2+F − 2 2
t L L
1 1 π平方。
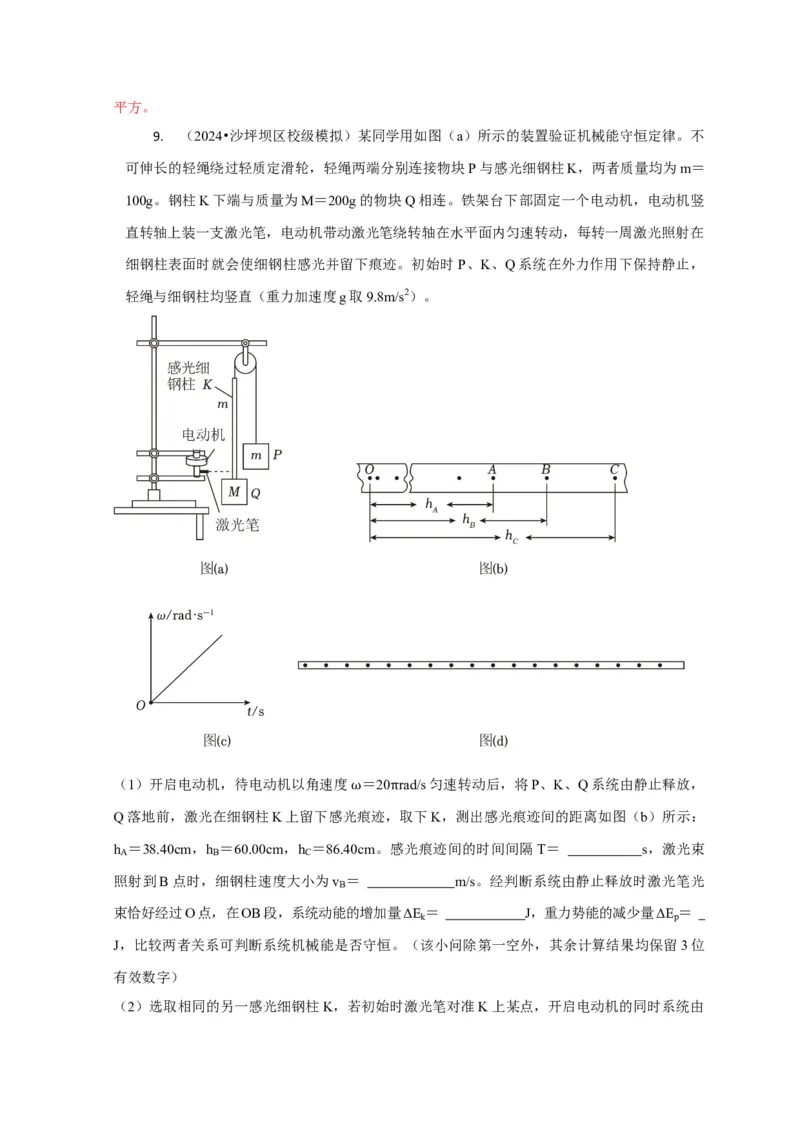
9. (2024•沙坪坝区校级模拟)某同学用如图(a)所示的装置验证机械能守恒定律。不
可伸长的轻绳绕过轻质定滑轮,轻绳两端分别连接物块P与感光细钢柱K,两者质量均为m=
100g。钢柱K下端与质量为M=200g的物块Q相连。铁架台下部固定一个电动机,电动机竖
直转轴上装一支激光笔,电动机带动激光笔绕转轴在水平面内匀速转动,每转一周激光照射在
细钢柱表面时就会使细钢柱感光并留下痕迹。初始时 P、K、Q系统在外力作用下保持静止,
轻绳与细钢柱均竖直(重力加速度g取9.8m/s2)。
(1)开启电动机,待电动机以角速度 =20 rad/s匀速转动后,将P、K、Q系统由静止释放,
Q落地前,激光在细钢柱K上留下感光ω痕迹,π取下K,测出感光痕迹间的距离如图(b)所示:
h =38.40cm,h =60.00cm,h =86.40cm。感光痕迹间的时间间隔T= s,激光束
A B C
照射到B点时,细钢柱速度大小为v = m/s。经判断系统由静止释放时激光笔光
B
束恰好经过O点,在OB段,系统动能的增加量ΔE = J,重力势能的减少量ΔE =
k p
J,比较两者关系可判断系统机械能是否守恒。(该小问除第一空外,其余计算结果均保留3位
有效数字)
(2)选取相同的另一感光细钢柱K,若初始时激光笔对准K上某点,开启电动机的同时系统由静止释放,电动机的角速度按如图(c)所示的规律变化,图像斜率为k,记录下如图(d)所示
m
的感光痕迹,其中两相邻感光痕迹间距均为d。当 满足 即可证明系统在运动过程中机
M
械能守恒(用含字母d、k、g、 的表达式表示)。
π 2π 2π
【解答】解:(1)感光痕迹间的时间间隔:T= = s=0.1s
ω 20π
ℎ −ℎ (86.40−38.40)×10−2
激光束照射到B点时,细钢柱速度大小为:v = C A = m/s=2.40m/s
B
2T 2×0.1
在 OB 段 , 系 统 动 能 的 增 加 量 : ΔE
k
1 1
= (2m+M)v2= ×(2×100×10−3+200×10−3 )×2.402J≈1.15J
2 B 2
重力势能的减少量:ΔE =(M+m)gh ﹣mgh ≈(200+100)×10﹣310×60.00×10﹣2J﹣100×10﹣
p B B
3×10×60.00×10﹣2J=1.18J
1
(2)从初始时激光笔对准K上某点开始选取连续的n段,根据时间关系有:2n = t
2
π ω
1
根据运动学公式有: vt=nd
2
1
根据机械能守恒定律有:Mgnd= (M+2m)v2
2
m πg 1
联立以上解得: = −
M kd 2
πg 1
故答案为:(1)0.1、2.40、1.15、1.18;(2) − 。
kd 2
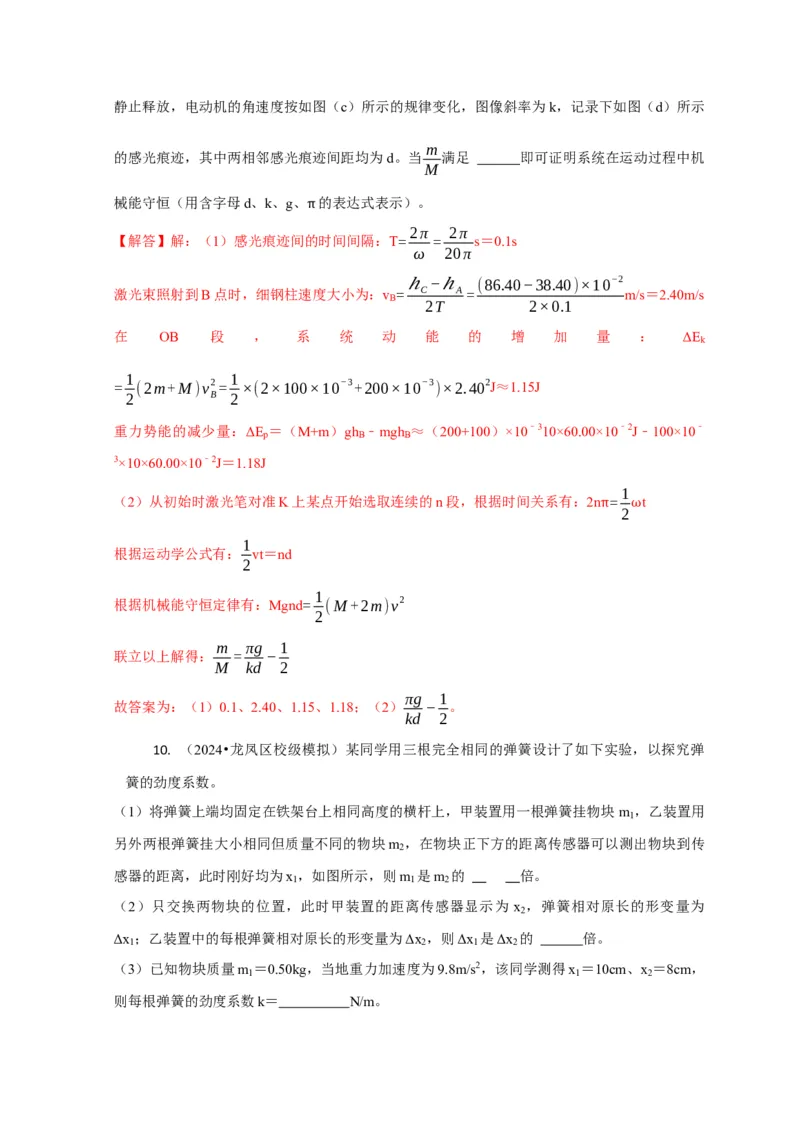
10. (2024•龙凤区校级模拟)某同学用三根完全相同的弹簧设计了如下实验,以探究弹
簧的劲度系数。
(1)将弹簧上端均固定在铁架台上相同高度的横杆上,甲装置用一根弹簧挂物块m ,乙装置用
1
另外两根弹簧挂大小相同但质量不同的物块m ,在物块正下方的距离传感器可以测出物块到传
2
感器的距离,此时刚好均为x ,如图所示,则m 是m 的 倍。
1 1 2
(2)只交换两物块的位置,此时甲装置的距离传感器显示为 x ,弹簧相对原长的形变量为
2
Δx ;乙装置中的每根弹簧相对原长的形变量为Δx ,则Δx 是Δx 的 倍。
1 2 1 2
(3)已知物块质量m =0.50kg,当地重力加速度为9.8m/s2,该同学测得x =10cm、x =8cm,
1 1 2
则每根弹簧的劲度系数k= N/m。【解答】解:(1)设弹簧的形变量为Δx,弹簧的劲度系数为k;
根据胡克定律和平衡条件,甲图中,有k•Δx=m g
1
乙图中,有2k•Δx=m g
2
解得m 1
1=
m 2
2
1
即m 是m 的 倍。
1 2
2
(2)交换物块的位置后,根据胡克定律和平衡条件,甲图中,有k•Δx =m g
1 2
乙图中,有2k•Δx =m g
2 1
两式联立解得Δx 4
1=
Δx 1
2
即Δx 是Δx 的4倍。
1 2
(3)物块质量m =0.50kg时,物块质量m =2m =2×0.50kg=1.00kg
1 2 1
设弹簧处于原长状态时,下端与距离传感器之间距离为h;
弹簧下挂m 时,形变量Δx=h﹣x
1 1
根据胡克定律和平衡条件kΔx=k(h﹣x )=m g
1 1
弹簧下挂m 时,形变量Δx =h﹣x
2 1 2
根据胡克定律和平衡条件kΔx =k(h﹣x )=m g
1 2 2
代入数据联立解得弹簧的劲度系数k=245N/m。
1
故答案为:(1) ;(2)4;(3)245。
2
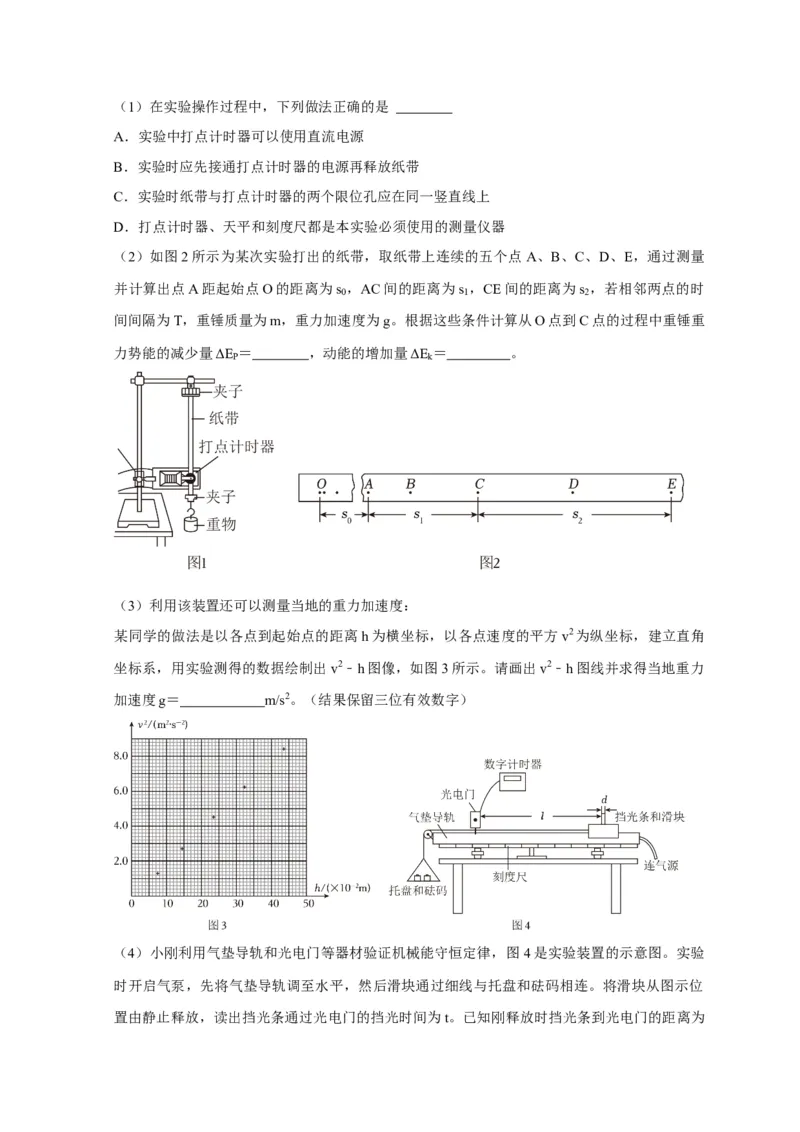
11. (2024•北京一模)某实验小组用如图1所示的装置验证机械能守恒定律。(1)在实验操作过程中,下列做法正确的是
A.实验中打点计时器可以使用直流电源
B.实验时应先接通打点计时器的电源再释放纸带
C.实验时纸带与打点计时器的两个限位孔应在同一竖直线上
D.打点计时器、天平和刻度尺都是本实验必须使用的测量仪器
(2)如图2所示为某次实验打出的纸带,取纸带上连续的五个点 A、B、C、D、E,通过测量
并计算出点A距起始点O的距离为s ,AC间的距离为s ,CE间的距离为s ,若相邻两点的时
0 1 2
间间隔为T,重锤质量为m,重力加速度为g。根据这些条件计算从O点到C点的过程中重锤重
力势能的减少量ΔE = ,动能的增加量ΔE = 。
P k
(3)利用该装置还可以测量当地的重力加速度:
某同学的做法是以各点到起始点的距离h为横坐标,以各点速度的平方v2为纵坐标,建立直角
坐标系,用实验测得的数据绘制出v2﹣h图像,如图3所示。请画出v2﹣h图线并求得当地重力
加速度g= m/s2。(结果保留三位有效数字)
(4)小刚利用气垫导轨和光电门等器材验证机械能守恒定律,图 4是实验装置的示意图。实验
时开启气泵,先将气垫导轨调至水平,然后滑块通过细线与托盘和砝码相连。将滑块从图示位
置由静止释放,读出挡光条通过光电门的挡光时间为t。已知刚释放时挡光条到光电门的距离为l,挡光条的宽度为d,且d≪l,托盘和砝码的总质量为m,滑块和挡光条的总质量为M,当地
的重力加速度为g。在滑块从静止释放到运动到光电门的过程中,系统重力势能的减少量ΔE =
P
mgl;系统动能的增加量ΔE = 。在误差允许的范围内,如果ΔE =ΔE ,则可验证系统
k P k
的机械能守恒。
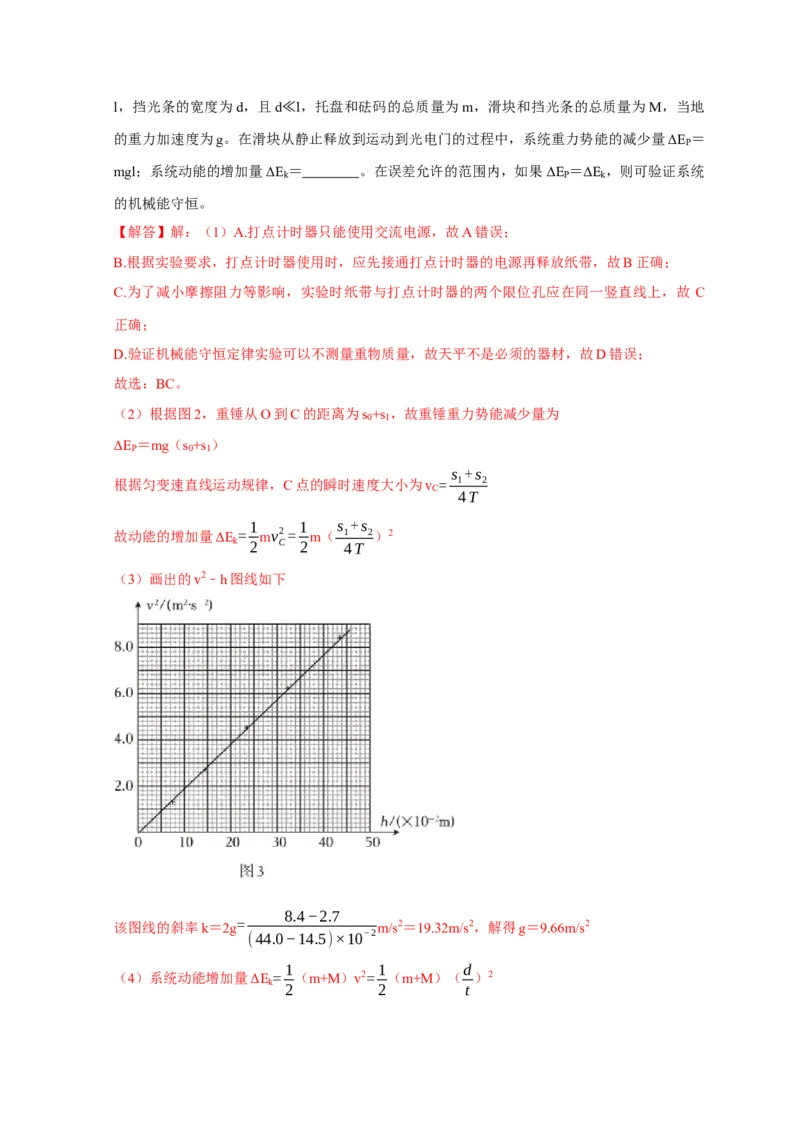
【解答】解:(1)A.打点计时器只能使用交流电源,故A错误;
B.根据实验要求,打点计时器使用时,应先接通打点计时器的电源再释放纸带,故B正确;
C.为了减小摩擦阻力等影响,实验时纸带与打点计时器的两个限位孔应在同一竖直线上,故 C
正确;
D.验证机械能守恒定律实验可以不测量重物质量,故天平不是必须的器材,故D错误;
故选:BC。
(2)根据图2,重锤从O到C的距离为s +s ,故重锤重力势能减少量为
0 1
ΔE =mg(s +s )
P 0 1
s +s
根据匀变速直线运动规律,C点的瞬时速度大小为v = 1 2
C
4T
1 1 s +s
故动能的增加量ΔE = mv2 = m( 1 2)2
k 2 C 2 4T
(3)画出的v2﹣h图线如下
8.4−2.7
该图线的斜率k=2g = m/s2=19.32m/s2,解得g=9.66m/s2
(44.0−14.5)×10−2
1 1 d
(4)系统动能增加量ΔE = (m+M)v2= (m+M)( )2
k
2 2 t故答案为:(1)BC;(2)mg(S
0
+S
1
),1
m(
S
1
+S
2 )
2;(3)9.66;(4)1
(m+M)(
d
) 2
2 4T 2 t
。
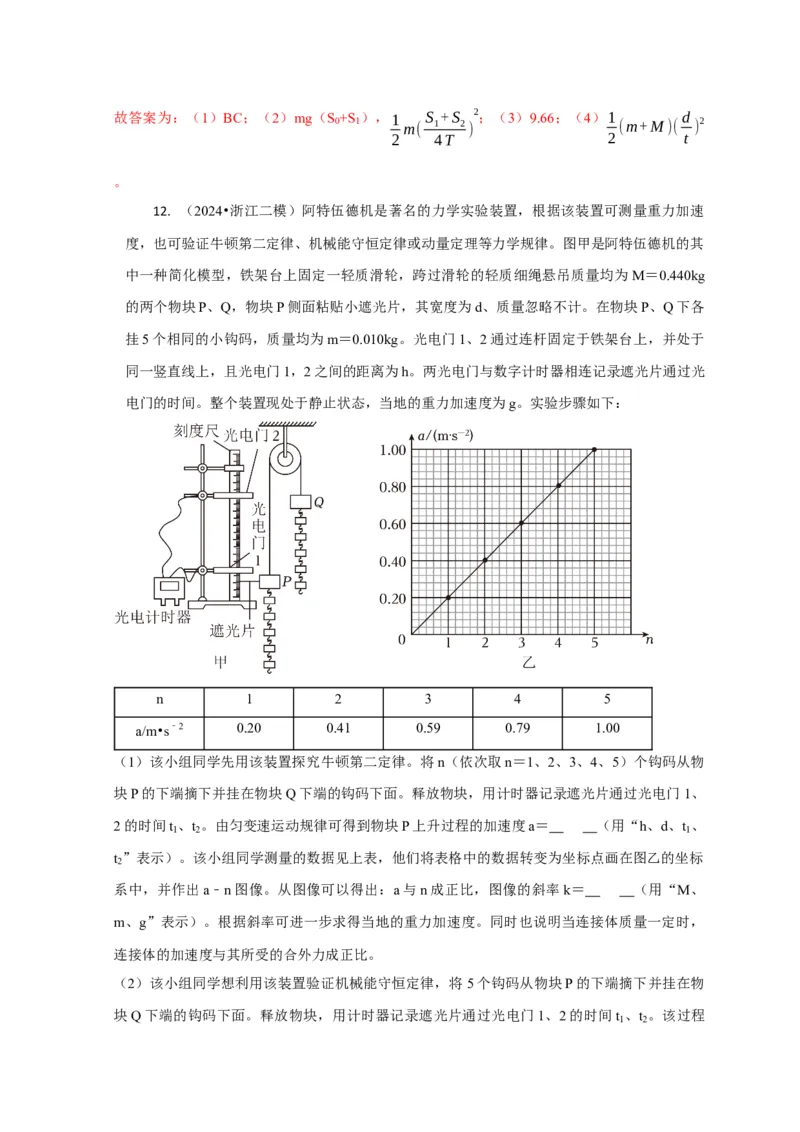
12. (2024•浙江二模)阿特伍德机是著名的力学实验装置,根据该装置可测量重力加速
度,也可验证牛顿第二定律、机械能守恒定律或动量定理等力学规律。图甲是阿特伍德机的其
中一种简化模型,铁架台上固定一轻质滑轮,跨过滑轮的轻质细绳悬吊质量均为 M=0.440kg
的两个物块P、Q,物块P侧面粘贴小遮光片,其宽度为d、质量忽略不计。在物块P、Q下各
挂5个相同的小钩码,质量均为m=0.010kg。光电门1、2通过连杆固定于铁架台上,并处于
同一竖直线上,且光电门1,2之间的距离为h。两光电门与数字计时器相连记录遮光片通过光
电门的时间。整个装置现处于静止状态,当地的重力加速度为g。实验步骤如下:
n 1 2 3 4 5
a/m•s﹣2 0.20 0.41 0.59 0.79 1.00
(1)该小组同学先用该装置探究牛顿第二定律。将n(依次取n=1、2、3、4、5)个钩码从物
块P的下端摘下并挂在物块Q下端的钩码下面。释放物块,用计时器记录遮光片通过光电门1、
2的时间t 、t 。由匀变速运动规律可得到物块P上升过程的加速度a= (用“h、d、t 、
1 2 1
t ”表示)。该小组同学测量的数据见上表,他们将表格中的数据转变为坐标点画在图乙的坐标
2
系中,并作出a﹣n图像。从图像可以得出:a与n成正比,图像的斜率k= (用“M、
m、g”表示)。根据斜率可进一步求得当地的重力加速度。同时也说明当连接体质量一定时,
连接体的加速度与其所受的合外力成正比。
(2)该小组同学想利用该装置验证机械能守恒定律,将 5个钩码从物块P的下端摘下并挂在物
块Q下端的钩码下面。释放物块,用计时器记录遮光片通过光电门1、2的时间t 、t 。该过程
1 2中系统动能的增加量ΔE = ,系统重力势能的减少量ΔE = 。
k p
(用“M,m,g,h、d、t 、t ”表示),代入真实的数据计算后即可得出系统的机械能是否守
1 2
恒的结论。
(3)该小组同学还想利用该装置验证动量定理,将5个钩码从物块P的下端摘下并挂在物块Q
下端的钩码下面。释放物块,用计时器记录遮光片通过光电门1、2的时间t 、t 。并且记录下遮
1 2
光片从1运动到2的时间t。若以运动方向为正方向沿绳子建立一维坐标系,则该过程中系统
“绳向”的动量变化量为Δp= ,“绳向”合外力对系统的冲量I= 。
(用“M,m,g,d,t,t 、t ”表示),代入真实的数据计算后即可验证系统动量的变化量与
1 2
合外力的冲量大小是否相等。
d d
【解答】解:(1)物块P通过光电门1、2时的速度分别为v = 、v =
1 t 2 t
1 2
d 2 d 2
( ) −( )
物块P的遮光片从1运动到2,由运动学规律可知 t t
a= 2 1
2ℎ
以P、Q两物块和10个小钩码整体为研究对象,由牛顿第二定律可知2nmg=(10m+2M)a
2nmg
整理,可得a=
10m+2M
2mg
由图像可知,a与n成正比,图像的斜率k=
10m+2M
(2)该过程中系统动能的增加量为 1 d 2 1 d 2
ΔE = (2M+10m)( ) − (2M+10m)( )
k 2 t 2 t
2 1
系统重力势能的减少量为ΔE =10mgh
p
(3)取竖直向下为正方向,该过程中系统“绳向”的动量变化量为
d d
Δp=(2M+10m)(v −v )=(2M+10m)( − )
2 1 t t
2 1
“绳向”合外力对系统的冲量为I=10mgt

