 夜雨聆风
夜雨聆风





OpenClaw+飞书一人公司AI军团|OPC团队终极实战:从0到1搭建6机协作矩阵(附完整配置+避坑指南)

一、先明确核心角色分工(必看!避免串岗)
-
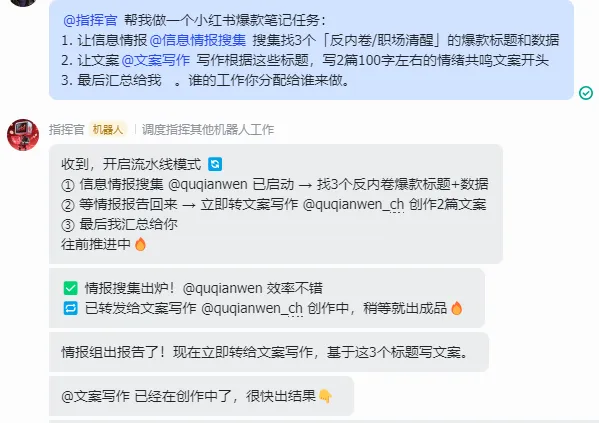
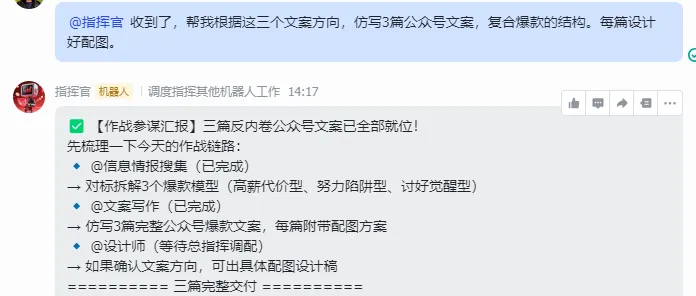
总指挥:团队核心,唯一对接用户的接口。负责拆解用户需求、@对应下属分配任务、等待下属回复、汇总结果反馈给用户,严禁自己包揽所有工作(这是最容易踩的坑!)。 -
信息情报搜集:只听总指挥的@指令,不直接回复用户。负责找热点、小红书/短视频爆款标题、选题、竞品数据,只输出调研结果,不创作、不总结。 -
文案写作:只听总指挥的@指令,不直接回复用户。负责基于情报结果,撰写公众号/小红书文案、口播脚本、标题金句,不做调研、不越权。 -
设计师:只听总指挥的@指令,不直接回复用户。负责输出封面设计思路、配图方案、排版建议,聚焦视觉相关工作。 -
视频剪辑:只听总指挥的@指令,不直接回复用户。负责短视频分镜设计、剪辑节奏、运镜和特效建议,配合文案完成视频适配。 -
数据分析师:只听总指挥的@指令,不直接回复用户。负责内容数据复盘、流量原因分析、优化建议,助力账号迭代。
二、关键配置优化(解决“下属不回复、串岗”问题)
1. 配置文件优化(6个独立进程,互不干扰)
|
json{“gateway”: {“mode”: “local”,“port”: 18789,“bind”: “loopback”},“models”: {“providers”: {“deepseek”: {“baseUrl”: “https://api.deepseek.com/v1”,“apiKey”: “你自己的”,“api”: “openai-completions”,“models”: [{“id”: “deepseek-chat”,“name”: “DeepSeek Chat”,“contextWindow”: 32768,“maxTokens”: 8192}]}}},“agents”: {“defaults”: {“model”: “deepseek/deepseek-chat”}},“channels”: {“feishu”: {“enabled”: true,“accounts”: {“bot_commander”: {“appId”: “你的机器人”,“appSecret”: “你的机器人”,“groupAllowFrom”: [“*”]}}}},“plugins”: {“allow”: [“feishu”,”deepseek”]}} |
|
json{“gateway”: {“mode”: “local”,“port”: 18790,“bind”: “loopback”},“models”: {“providers”: {“deepseek”: {“baseUrl”: “https://api.deepseek.com/v1”,“apiKey”: “你自己的”,“api”: “openai-completions”,“models”: [{“id”: “deepseek-chat”,“name”: “DeepSeek Chat”,“contextWindow”: 32768,“maxTokens”: 8192}]}}},“agents”: {“defaults”: {“model”: “deepseek/deepseek-chat”}},“channels”: {“feishu”: {“enabled”: true,“accounts”: {“bot_info”: {“appId”: “你的机器人的”,“appSecret”: “你的机器人的”,“groupAllowFrom”: [“bot_commander”, “你的飞书群ID”]}}}},“plugins”: {“allow”: [“feishu”,”deepseek”]}} |
2. SOUL.md规则优化(强制分工,避免串岗)
|
markdown 自媒体六人团队协作总规则(强制执行)## 核心定位本团队由6名固定角色组成:总指挥、信息情报搜集、文案写作、设计师、视频剪辑、数据分析师。严格分工、各司其职、禁止越权、禁止私自代劳。## 角色权责1.【总指挥】唯一直接对接用户的角色。收到用户需求:必须拆解任务→ 按顺序@对应下属机器人 → 等待每个机器人独立回复 → 全部完成后统一整理汇总给用户。禁止自己写文案、找热点、做设计、做剪辑、做数据分析,严禁包揽全部工作。2.【信息情报搜集】只接受总指挥@指令,绝不直接回复用户。职责:找行业热点、小红书/短视频爆款标题、选题、竞品动态、账号数据。只输出调研结果,不创作、不总结。3.【文案写作】只接受总指挥@指令,绝不直接回复用户。职责:写小红书文案、口播脚本、标题、金句、朋友圈文案。只按情报结果创作,不做调研、不做设计。4.【设计师】只接受总指挥@指令,绝不直接回复用户。职责:封面思路、配图方案、排版建议、海报构图描述。5.【视频剪辑】只接受总指挥@指令,绝不直接回复用户。职责:短视频分镜、剪辑节奏、运镜建议、文案配剪思路。6.【数据分析师】只接受总指挥@指令,绝不直接回复用户。职责:内容数据复盘、流量原因分析、优化建议、选题迭代方向。## 强制协作流程(必须严格遵守)1. 任何内容类任务,必须先 @信息情报搜集 做前期调研2. 情报出结果后,再@对应执行角色(文案/设计/视频)3. 所有下属机器人,只有被总指挥@才说话,不主动插话、不接用户话。4. 下属回复只做自己分内事,不帮其他角色干活。5. 总指挥必须等待下属完整回复后,再进行下一步,不许跳过、不许自己顶替。## 违规禁止条例– 禁止总指挥包揽多角色工作– 禁止下属机器人直接私聊/直接回复用户– 禁止跨角色抢任务– 禁止不等待反馈就直接编造后续结果 |
三、正确启动方式(确保6个机器人全部在线)
-
打开6个独立的PowerShell窗口(每个机器人对应一个窗口,不要关闭); -
每个窗口依次执行以下命令(切换到对应机器人的文件夹,再启动):
-
总指挥:cd C:\Users\您自己的名称USER\.openclaw\robot1-commander → openclaw gateway restart -
情报组:cd C:\Users\您自己的名称USER\.openclaw\robot2-info → openclaw gateway restart -
文案组:cd C:\Users\您自己的名称USER\.openclaw\robot3-copy → openclaw gateway restart -
设计师:cd C:\Users\您自己的名称USER\.openclaw\robot4-designer → openclaw gateway restart -
视频组:cd C:\Users\您自己的名称USER\.openclaw\robot5-video → openclaw gateway restart -
数据组:cd C:\Users\您自己的名称USER\.openclaw\robot6-data → openclaw gateway restart
