夜雨聆风
夜雨聆风





��OpenClaw+宇树机器人,2天攻克移动操作与长时自治难题(含Skills技能库)
机器人静止时抓取得很好,但如何实现“导航到目标前,动态调整位姿然后抓取”?
在机器人的世界里,要完成一个任务,系统通常分为四个层次:大脑(决策层)、感知层、行为组织层、小脑(控制层)。OpenClaw主要负责前面几层能力的调用、编排和衔接。至于机器人最后怎么动、动作能不能稳定落地,仍然依赖底层控制系统、运动学求解和执行链路。

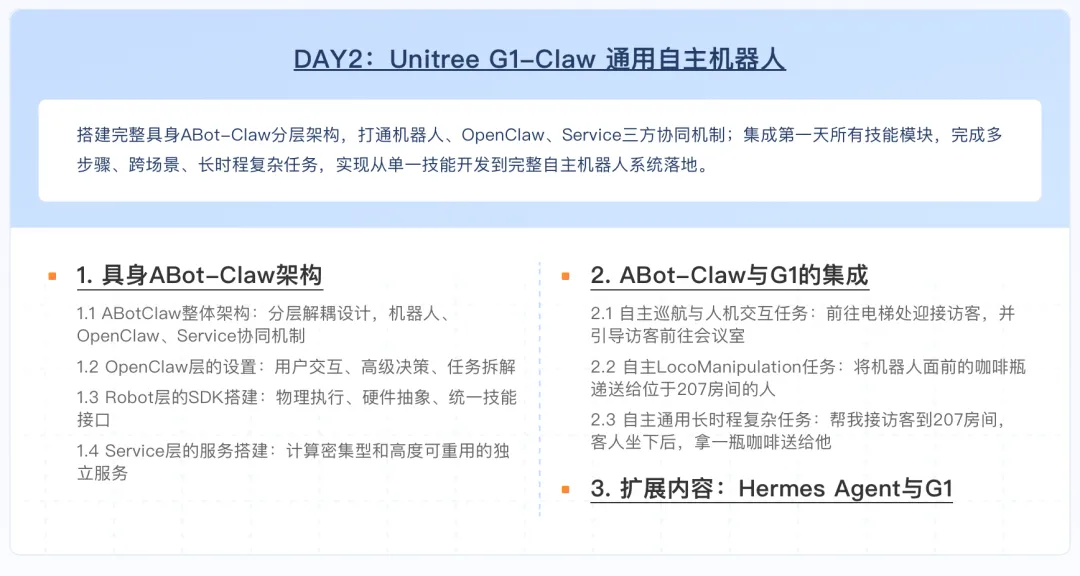
两天线下高强度真机实训,你将亲手完成:从零搭建Agent技能库(导航、人脸识别、语音交互、物体识别),为G1适配灵心巧手O6灵巧手,完成机械臂逆解与AnyGrasp抓取位姿估计并封装自主抓取Skill,部署ABot‑Claw三层架构(OpenClaw/Robot/Service),最终让G1具备从意图理解到物理执行的完整能力,在真实场景中完成长时程复杂任务。

-
大模型驱动的具身Agent:基于OpenClaw,实现LLM调度技能、共享记忆、主动规划,让G1人形机器人听懂自然语言指令,自主完成“导航 → 识物 → 抓取 → 返回”等长时程任务。
-
移动操作LocoManipulation:从底层IK逆解、AnyGrasp抓取位姿估计,到“边走边作业”的真实场景融合,打通视觉、导航、机械臂与灵巧手的协同控制。
-
顶配硬件资源·真机实操:每组配备宇树G1(含NVIDIA Orin NX)+灵心巧手O6五指灵巧手+ RTX 4090工作站,两天全程真机开发,拒绝仿真空谈。
-
具身智能与机器人从业者:提升硬件实操能力,突破职业发展瓶颈
-
机器人/自动化/计算机/电子信息等相关专业的本科生/研究生:衔接行业实际需求,丰富实战项目经历与技术栈
-
大模型与Agent开发者:寻求跨界,希望将大模型与Agent应用到具身智能与机器人领域
-
机器人:宇树人形机器人G1开发版,搭载NVIDIA OrinNX
-
灵巧手:灵心巧手O6五指灵巧手
-
工作站:RTX 4090/3090 GPU、显存≥24G、Ubuntu22.04操作系统
-
技术栈:Isaac Sim&Lab、MuJoCo、ROS2、OpenClaw、Hermes Agent