 夜雨聆风
夜雨聆风在智能体(Agent)自动化工程化领域,OpenClaw 的出现引发了行业对“自动化实现路径”的重新思考。不少开发者在实操 OpenClaw 后,常会产生疑问:这款工具既无可视化编排界面,也无明确的流程定义入口,为何能实现复杂的多系统自动化?其与 Coze、Dify 等低代码平台,以及 LangGraph 等开发框架的核心差异究竟在哪里?是否会对现有智能体开发体系形成替代?
事实上,这类疑问的核心的是对“自动化实现范式”的认知偏差——OpenClaw 从设计之初就跳出了“流程驱动”的传统框架,采用“目标驱动”的动态推理模式,与 Coze、LangGraph 分属两条完全不同的技术路径。
本文将从底层架构、技术原理、核心组件、工程化实践四个维度,深度拆解 OpenClaw 的技术逻辑,清晰界定其与传统工具的差异。

一、传统智能体自动化范式:Coze 与 LangGraph 的“流程依赖”本质
Coze、Dify 等低代码平台,以及 LangGraph 等开发框架,虽在交互形式和技术实现上存在差异,但核心均遵循“流程驱动”的自动化范式——即通过人工定义明确的执行路径,智能体仅负责按既定流程落地执行。这种范式的核心前提是“开发者明确知道自动化的完整步骤”,工具的价值在于降低流程落地的技术门槛或提升流程的可维护性。
1.1 Coze 类低代码平台:可视化流程编排的工程化落地
Coze 等低代码平台的核心定位是“流程可视化、组件化开发”,其技术本质是将复杂的自动化流程拆解为可拖拽、可配置的节点,通过可视化连线定义节点间的依赖关系、输入输出规则及异常兜底逻辑,本质是“图形化编程”的一种简化形式。
从技术架构来看,Coze 这类平台主要包含三大核心模块:
可视化编排引擎:提供节点拖拽、连线配置、参数设置等交互能力,支持 HTTP 请求、代码片段、LLM 调用、数据处理等常用节点,开发者可通过画布直观定义执行流程,无需编写底层代码;
节点调度器:负责解析可视化流程的节点依赖关系,按顺序或并行执行节点,处理节点间的输入输出映射,同时提供超时重试、异常捕获、兜底降级等流程控制能力;
插件生态系统:内置或通过插件市场提供各类第三方系统集成能力(如 GitHub、Notion、Slack 等),开发者无需自行开发集成逻辑,仅需通过节点配置即可完成多系统联动。
Coze 类低代码平台的核心工作流程可通过以下流程图直观展示:
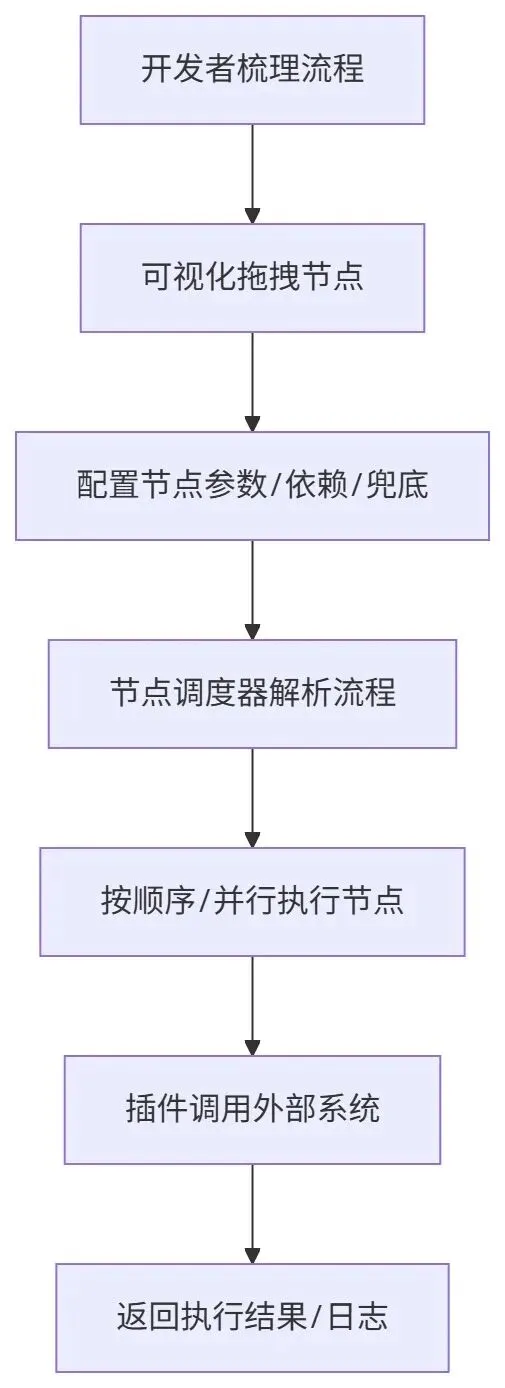
其技术优势在于确定性强、可审计性高、上手门槛低——开发者只需在脑海中梳理清楚自动化流程的每一步,即可通过可视化操作将流程“翻译”为工具可执行的节点图,执行结果可追溯、可调试,适合流程固定、需求稳定的生产级场景。但短板也同样明显:流程定义的成本集中在“人工梳理与翻译”,当需求频繁变动或流程逻辑复杂时,节点图的修改与维护成本会急剧上升,且无法应对“流程不明确”的场景。
1.2 LangGraph:代码化流程编排的精准控制
LangGraph 作为 LangChain 生态下的流程编排框架,采用“代码声明式”的流程定义方式,其技术本质是将自动化流程抽象为有向图(DAG 或带环图),通过 Python 代码定义节点、边、状态迁移规则,实现对智能体执行流程的精准控制,更适合技术团队的工程化落地。
LangGraph 的核心技术特性体现在三个方面:
图结构建模:以节点(Node)表示任务步骤(如 LLM 调用、工具调用、数据处理),以边(Edge)表示节点间的依赖关系和状态迁移条件,支持循环、分支等复杂流程逻辑,可精准描述多步骤、多条件的自动化场景;
状态管理机制:内置可持久化的状态存储,支持在流程执行过程中动态更新状态(如任务进度、中间结果、外部数据),并基于状态进行分支判断和流程跳转,适合需要复杂状态控制的场景;
工程化适配:支持代码版本管理、单元测试、集成测试,可与 CI/CD 流程无缝对接,便于团队协作开发和生产环境部署,同时可灵活扩展自定义节点和工具,适配复杂的业务需求。
与 Coze 相比,LangGraph 的优势在于流程控制更精准、扩展性更强、工程化程度更高,适合对流程确定性要求极高、需要复杂状态管理的场景(如金融对账、法务合规、复杂业务流程自动化)。但其短板在于上手门槛高,需要开发者具备 Python 编程能力,且流程定义同样依赖人工梳理,无法应对“目标明确但流程未知”的场景。
二、核心差异:范式之争——流程驱动 vs 目标驱动
OpenClaw 与 Coze、LangGraph 的本质差异,并非“有无可视化界面”或“是否需要代码”,而是底层自动化范式的不同——Coze、LangGraph 遵循“流程驱动”,OpenClaw 遵循“目标驱动”,两者的核心假设、技术路径和适用场景完全不同。
2.1 核心假设的本质区别
Coze 与 LangGraph 的共同核心假设是:开发者明确知道自动化的完整执行流程,工具的核心价值是将人工梳理的流程落地执行。这种假设下,开发者需要先完成“需求拆解→流程设计→步骤定义”的全流程,工具仅作为执行载体,不参与流程的设计与决策。
而 OpenClaw 的核心假设完全相反:开发者仅明确自动化目标,无需知道具体执行流程,工具的核心价值是通过 AI 推理,动态规划出实现目标的最优流程。这种假设下,流程不再是人工设计的固定路径,而是智能体在运行时根据目标、环境、可用能力动态生成的动态路径,大幅降低了开发者的流程设计成本。
2.2 技术路径的核心分野
流程驱动与目标驱动的假设差异,决定了两者的技术路径完全不同:
流程驱动(Coze / LangGraph):技术核心是“流程解析与执行”——工具通过解析人工定义的流程(可视化节点图或代码化有向图),按既定规则调度节点、处理依赖、执行任务,核心能力集中在“流程的精准执行与控制”,AI 仅作为流程中的一个节点(LLM 调用),不参与流程规划;
目标驱动(OpenClaw):技术核心是“目标理解与动态规划”——工具通过 LLM 解析用户输入的自然语言目标,拆解为可执行的子目标,自动检索可用能力(Skills),动态组装执行流程,核心能力集中在“AI 推理与流程自适应”,流程是运行时动态生成的,而非人工预设。
这也是 OpenClaw 无需可视化编排界面的核心原因:它不需要人工定义流程,流程是 AI 动态规划的产物,可视化编排反而会限制 AI 的动态决策能力,与目标驱动的范式相悖。
三、OpenClaw 底层架构解析:五层架构实现“目标到自动化”的转化
要理解 OpenClaw 的目标驱动范式,核心是拆解其运行时架构。OpenClaw 的运行时采用分层设计,共分为五层,各层职责清晰、协同工作,无需人工干预即可完成“自然语言目标→自动化流程→执行落地”的全链路转化,其架构设计充分体现了“AI 主导、动态自适应”的核心思想。
OpenClaw 五层运行时架构图如下:
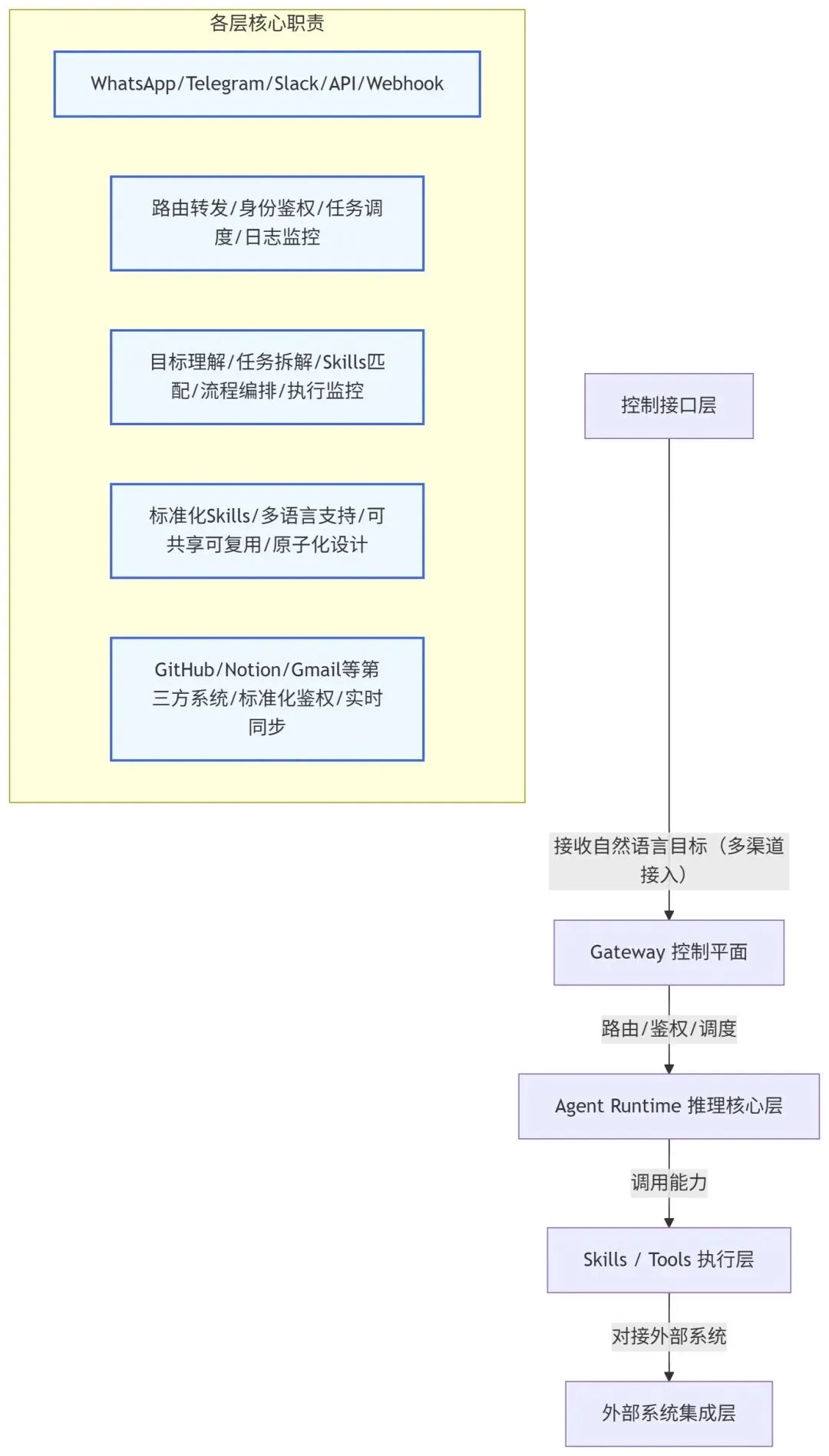
3.1 架构分层详解(从顶层到底层)
1. 控制接口层(User Interface Layer)
作为用户与系统的交互入口,负责接收用户的自然语言目标的输入,支持多渠道接入,无需统一的交互规范,核心目标是降低用户的使用门槛。
核心特性:支持 WhatsApp、Telegram、Slack 等即时通讯工具,以及 API、Webhook 等程序化接入方式,采用自然语言交互,用户无需学习特定的语法或指令,直接输入目标即可触发自动化流程;支持多轮对话交互,可对目标进行补充、修改,动态调整自动化需求。
2. Gateway 控制平面(Gateway Control Plane)
作为系统的“中枢神经”,负责请求路由、身份鉴权、任务调度和负载均衡,是连接控制接口层与核心推理层的关键纽带,确保请求能够高效、安全地流转到对应的处理单元。
核心职责:
路由转发:根据用户输入的目标类型、接入渠道,将请求路由到对应的 Agent 实例,支持多 Agent 实例的负载均衡;
身份鉴权:验证用户身份、权限,确保只有授权用户才能调用系统能力,同时对外部系统的接入进行鉴权(如 GitHub、Notion 的 API 授权);
任务调度:管理任务的生命周期,包括任务创建、执行、暂停、终止,协调各层组件的协同工作,确保流程执行的有序性;
日志与监控:记录用户请求、流程执行过程、异常信息等,为问题排查、性能优化提供数据支持。
3. Agent Runtime(推理核心层)
作为 OpenClaw 的“大脑”,是目标驱动范式的核心载体,负责目标理解、任务拆解、流程规划、Skills 选择与调度,是实现“动态流程生成”的关键所在,也是 OpenClaw 与传统工具的核心差异点。
核心组件与工作流程:
目标理解模块:基于 LLM(如 GPT-4、Claude)对用户输入的自然语言目标进行语义解析,提取核心需求、约束条件(如定时触发、多系统联动要求),生成标准化的目标描述;
任务拆解模块:将标准化目标拆解为可执行的子目标,明确子目标之间的依赖关系(如“先采集数据,再处理数据,最后推送结果”),形成子目标序列;
Skills 检索与匹配模块:根据子目标的需求,检索本地 Skills 注册表和 ClawHub 社区 Skills 库,通过语义匹配算法,筛选出能够实现该子目标的最优 Skills,若存在缺失的 Skills,自动提示用户安装或授权;
流程编排模块:通过内部的“Lobster”Workflow Shell,将筛选出的 Skills 按子目标依赖关系动态组装为执行链(Pipeline),无需人工定义节点间的连接逻辑,同时根据目标约束条件(如定时)绑定对应的触发器(如 Cron 触发器);
执行监控与调整模块:实时监控流程执行状态,若某个 Skill 执行失败,自动触发重试机制,若重试失败,根据异常类型动态调整流程(如替换备用 Skills),确保目标能够顺利实现。
4. Skills / Tools 执行层(能力执行层)
作为系统的“能力载体”,负责将 Agent Runtime 规划的流程转化为具体的执行动作,是连接核心推理层与外部系统的关键,也是 OpenClaw 可扩展性的核心来源。
Skills 的核心技术特性:
标准化定义:每个 Skill 均遵循统一的规范定义,包含名称、描述、参数 Schema、执行逻辑四部分,其中参数 Schema 采用 JSON Schema 规范,确保 Agent 能够自动解析参数要求,实现无人工干预的调用;
多语言支持:主要支持 TypeScript 开发,同时兼容 JavaScript,开发者可通过简单的代码编写自定义 Skills,实现特定的业务逻辑或外部系统集成;
可复用性与可共享性:Skills 可独立部署、版本管理,支持发布到 ClawHub 社区,供其他开发者或 Agent 自动检索、调用,形成标准化的能力生态;
原子化设计:每个 Skill 仅实现单一的核心能力(如“读取 GitHub Issues”“创建 Notion 页面”),确保 Agent 能够灵活组合,适配不同的目标需求。
示例:一个读取 GitHub Issues 的 Skill 实现(TypeScript):
5. 外部系统集成层(External Integration Layer)
负责与各类第三方系统、服务进行对接,通过 Skills 调用外部系统的 API 或接口,实现多系统联动,是自动化流程能够落地的基础。
核心特性:支持 GitHub、Notion、Gmail、Slack、Linear 等主流办公、开发工具的集成,同时支持自定义外部系统接入(通过编写对应 Skills);采用 OAuth 2.0、API Key 等标准化鉴权方式,确保集成的安全性;支持实时数据同步、事件触发(如 GitHub Issue 新增触发自动化流程),提升自动化的实时性。
3.2 架构核心优势
OpenClaw 的五层架构设计,充分体现了“目标驱动、动态自适应”的核心思想,其优势主要体现在三个方面:
低代码/无代码门槛:用户无需定义流程、编写代码,仅需输入自然语言目标,系统即可自动完成流程规划与执行,大幅降低了自动化开发的门槛,非技术人员也能快速上手;
高灵活性与自适应能力:流程是运行时动态生成的,能够根据目标变化、外部系统状态变化、Skills 可用性变化,自动调整执行路径,适配需求频繁变动的场景;
高可扩展性:通过 Skills 机制,开发者可灵活扩展系统能力,同时借助 ClawHub 社区生态,实现 Skills 的共享与复用,快速适配各类业务场景和外部系统。
四、运行时流程拆解:自然语言目标如何转化为自动化流程?
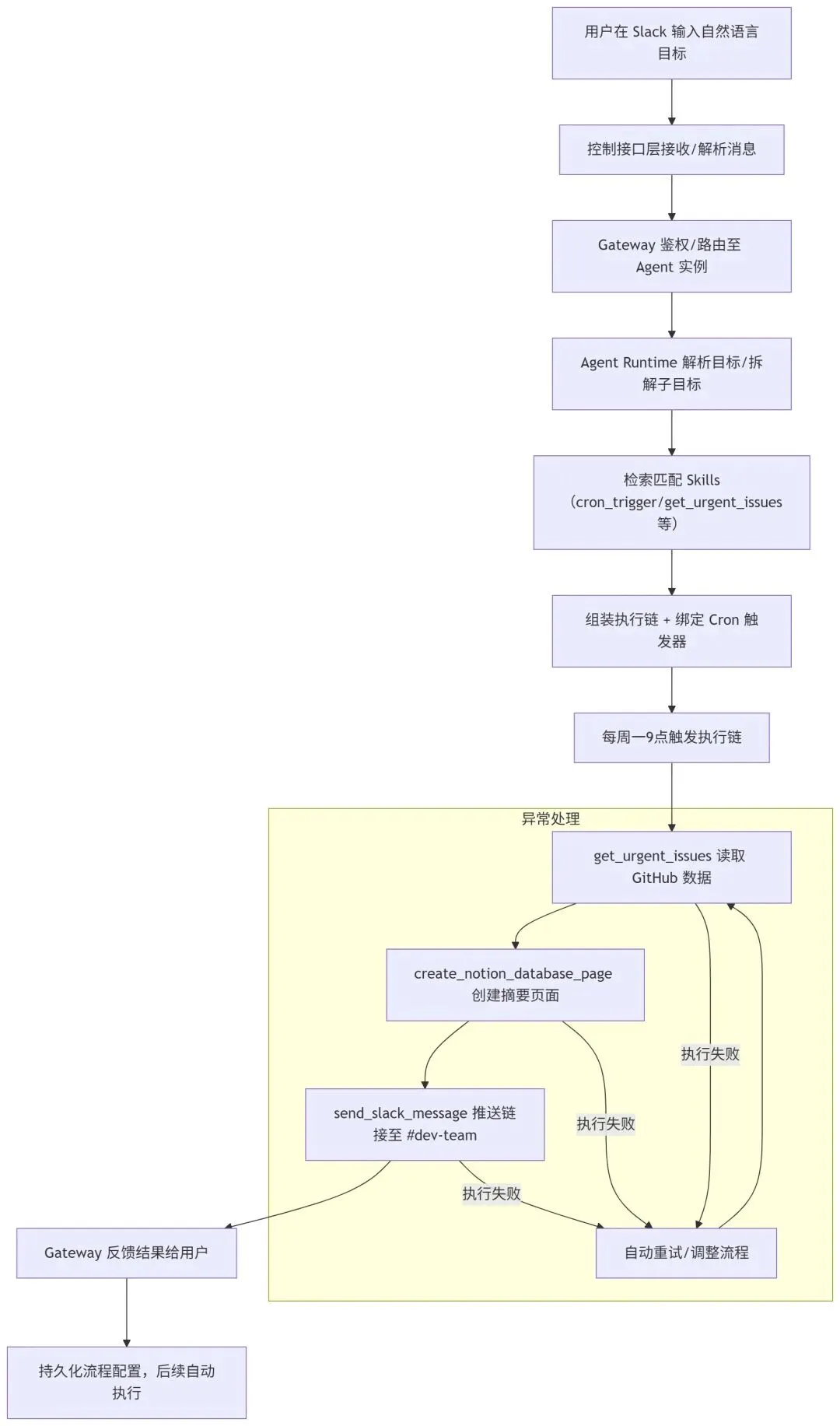
为更直观地理解 OpenClaw 的技术逻辑,我们以一个具体的自动化需求为例,拆解其从用户输入到流程执行的全链路运行时过程,清晰展现“目标驱动”范式的核心优势。
4.1 需求场景
用户在 Slack 中输入自然语言目标:“每周一早上 9 点,扫描 GitHub 仓库(owner/repo: openclaw/docs)中标注了 urgent 标签的 Issue,在 Notion 数据库(数据库 ID: 123456)中创建摘要页面,包含 Issue 标题、链接、创建时间,然后将 Notion 页面链接发送到 Slack 的#dev-team 频道。”
4.2 全链路运行时流程
结合需求场景,OpenClaw 全链路运行时流程图如下:
五、Skills 机制:OpenClaw 可扩展性的核心支撑
OpenClaw 之所以能够适配多场景、多系统的自动化需求,核心在于其 Skills 机制——Skills 作为系统的原子化能力单元,不仅实现了能力的可扩展,更实现了“Agent 自动发现、自动调用”的核心目标,与 Coze 的插件、LangGraph 的自定义节点形成了本质差异。
5.1 Skills 与 Coze 插件、LangGraph 自定义节点的差异
对比维度 | OpenClaw Skills | Coze 插件 | LangGraph 自定义节点 |
核心定位 | 原子化能力单元,支持 Agent 自动发现与调用 | 可视化节点组件,需人工拖拽配置到流程中 | 代码化任务步骤,需人工编写到有向图中 |
调用方式 | Agent 基于语义匹配自动调用,无需人工干预 | 人工拖拽配置,手动定义调用时机和参数 | 代码中手动声明调用逻辑,与其他节点联动 |
标准化程度 | 严格遵循统一规范(名称、描述、参数 Schema),支持自动解析 | 无统一规范,不同插件的参数、接口差异较大 | 无统一规范,由开发者自行定义接口和逻辑 |
共享与复用 | 支持发布到 ClawHub 社区,Agent 可自动检索复用 | 插件市场下载,需人工手动安装配置 | 代码复用,需手动复制或引入到项目中 |
扩展成本 | TypeScript 编写,遵循规范即可,成本低 | 需适配平台插件规范,开发成本较高 | 需熟悉 LangGraph 框架,编写代码集成,成本高 |
5.2 ClawHub:Skills 生态的核心载体
ClawHub 作为 OpenClaw 的 Skills 社区生态平台,承担着 Skills 的发布、检索、共享、版本管理等功能,是 OpenClaw 可扩展性的重要支撑。其核心价值在于:
标准化注册:开发者发布 Skills 时,需遵循 OpenClaw 的 Skills 规范,确保 Skills 能够被 Agent 自动解析和匹配;
语义检索:提供基于语义的 Skills 检索功能,Agent 可根据子目标的语义描述,快速检索到匹配的 Skills;
版本管理:支持 Skills 的版本迭代,开发者可更新 Skills 的执行逻辑,同时保留历史版本,确保兼容性;
权限管理:支持 Skills 的私有发布和公开共享,开发者可控制 Skills 的访问权限,确保核心能力的安全性。
ClawHub 与 Skills、Agent Runtime 的协同逻辑如下:

通过 ClawHub 生态,OpenClaw 的 Skills 数量不断丰富,覆盖更多的外部系统和业务场景,开发者无需重复开发,仅需通过 Agent 自动检索和调用现有 Skills,即可快速实现复杂的自动化需求。
六、三方工具技术差异全景对比
为更清晰地界定 OpenClaw 与 Coze、LangGraph 的技术差异,我们从技术架构、核心能力、工程化特性、适用场景等多个维度,进行全景对比,为开发者提供精准的选型参考。
对比维度 | Coze(低代码平台) | LangGraph(开发框架) | OpenClaw(目标驱动工具) |
自动化范式 | 流程驱动(人工定义流程) | 流程驱动(代码定义流程) | 目标驱动(AI 动态规划流程) |
核心架构 | 可视化编排引擎 + 节点调度器 + 插件生态 | 有向图建模 + 状态管理 + 代码执行引擎 | 五层架构(控制接口 + Gateway + Agent Runtime + Skills + 外部集成) |
流程定义方式 | 可视化拖拽节点、连线配置 | Python 代码声明节点、边、状态迁移 | 自然语言输入目标,AI 动态生成流程 |
流程控制 | 人工定义,确定性强,无动态调整能力 | 代码定义,确定性极强,支持复杂状态控制 | AI 运行时决策,灵活自适应,支持动态调整 |
扩展方式 | 插件市场下载,手动配置 | 自定义代码节点,集成到有向图中 | Skills 开发 + ClawHub 共享,Agent 自动发现 |
触发器配置 | 人工手动配置(定时、事件、手动触发) | 代码手动声明触发逻辑 | AI 自动解析目标,绑定对应触发器 |
状态管理 | 需手动配置存储节点,实现状态持久化 | 内置状态存储,支持复杂状态迁移与持久化 | 内置跨会话持久记忆,自动管理状态 |
运行环境 | 云端托管为主,部分支持私有化部署 | 本地开发、云端部署均可,灵活度高 | 本地优先,支持自托管,兼顾隐私与灵活性 |
可审计性 | 强,流程可视化,执行日志可追溯 | 极强,代码可版本管理,执行过程可调试 | 较弱,依赖 Agent 执行日志,无可视化流程追溯 |
上手门槛 | 低,非技术人员可快速上手 | 高,需具备 Python 编程能力和流程设计能力 | 极低,仅需输入自然语言目标,无需技术基础 |
Token 消耗 | 低,仅 LLM 节点消耗 Token | 低,LLM 调用可手动控制,消耗可控 | 高,AI 流程规划、语义匹配需频繁调用 LLM |
