夜雨聆风
夜雨聆风"三阶段"优秀工程师之路
1、基础阶段:博途PLC技术。
2、中级阶段:SCL与C#编程技术。
3、高级阶段:PLC标准化编程方法。
标准化方法之路!

编者说:工程师作者是MCD应用专家,将机器人数据导入MATALB进行调试,跨专业多软件融合的应用,体现工程师的核心竞争力!
工程师作者已经发布的文章:
一、什么是URDF?
URDF的全称是Unified Robot Description Format,即统一机器人描述格式。它是一种基于XML的文本格式,专门用于描述机器人的运动学和动力学模型。
简单来说,URDF就是机器人的“骨架说明书”——它告诉计算机机器人有哪些部件、部件之间如何连接、每个部件的形状和大小、部件之间的相对位置、关节的运动类型(旋转或平移)等信息。
二、URDF的核心组成
一个典型的URDF文件包含以下几个关键元素:
1)连杆(Link)
连杆代表机器人的一个刚性部件,比如机械臂的一节臂杆或移动机器人的底盘。每个Link需要定义:
视觉形状:用于显示,通常为圆柱、立方体、球体或导入的网格文件(如STL、DAE)
碰撞形状:用于物理碰撞检测,通常用简化的几何体提高计算效率
惯性参数:质量、质心位置和转动惯量,用于动力学仿真
2)关节(Joint)
关节描述两个连杆之间的连接关系,定义了相对运动的类型和限制:
固定关节:两个连杆之间没有相对运动
旋转关节:绕一个轴旋转(如伺服电机驱动的关节)
滑动关节:沿一个轴平移(如伸缩机构)
平面关节:在平面内自由运动
浮动关节:完全自由的6自由度运动
关节还需定义运动范围、最大速度、最大力矩等物理约束。
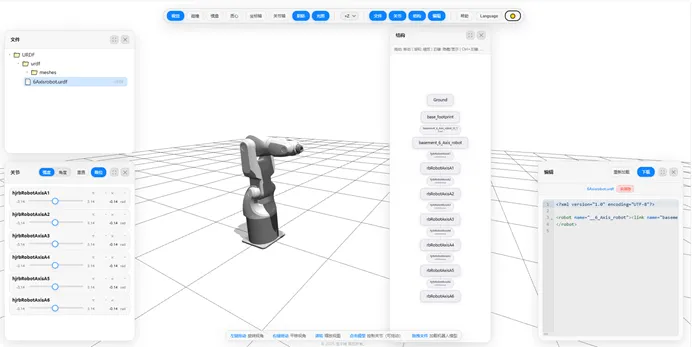
三、Designcenter NX (NX2512 3000及以上版本)支持URDF优势
1)选择几何体直接创建link对象,不需要手动输入CSYS
2)自动计算质心和转动惯量
3)依据选择,自动生成父子关系,自动计算相对坐标
4)自动进行单位换算(URDF单位米,设计单位可能是mm,inch)
5)Designcenter NX可以通过颜色显示工具,查找漏定义link对象
6)通过Joint jogger检查所有关节移动,转动,不需要到其他平台查看
7)导出前检测闭环,如果存在闭环给用户报错
8)支持用户自定义缩放比例
9)NX MCD支持PhysX引擎 (和ISAAC Sim相同),如果用户可以定义电机驱动信息,可使用MCD做初步的行为检测,比如移动和抓取等操作。
10)支持定义和导出关节电机驱动信息包括:速度(Velocity),力(force)和扭矩(effort)。
四、操作视频
总结:跨专业多软件融合的应用,体现工程师的核心竞争力!

让技术学习更简单!

PLC标准化的技术方法:标准化包括哪些技术点?技术点之间的关系是怎样的?
PLC标准化的技术路线讲解视频:S88标准、技术架构和不断迭代
加入博途之友,与优秀工程师有约

芮老师的书籍(京东和当当可以购买)