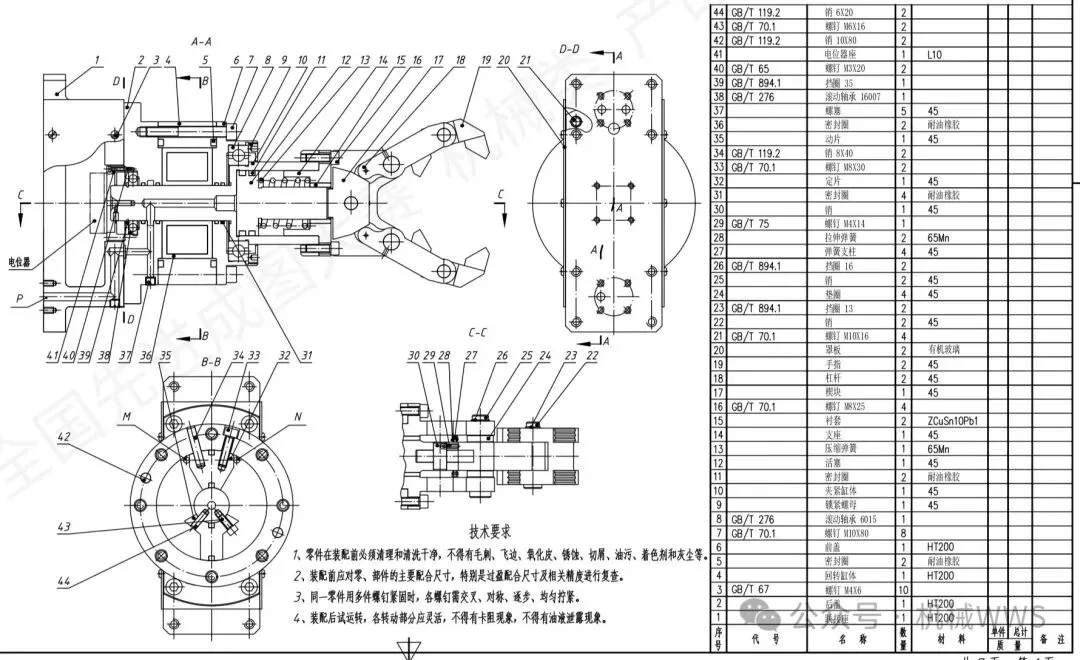
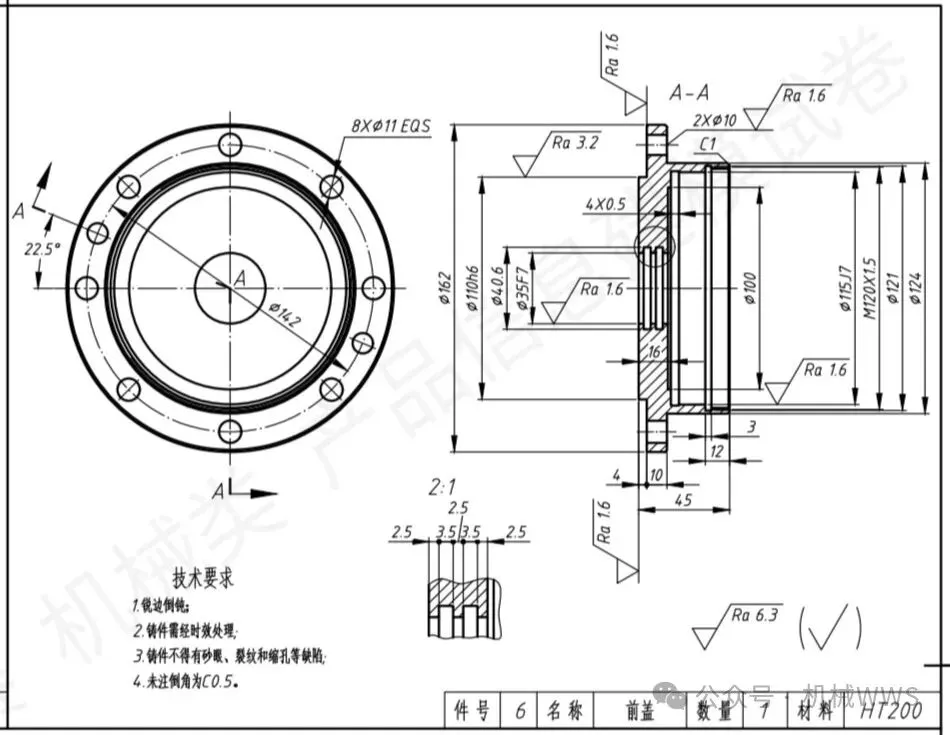
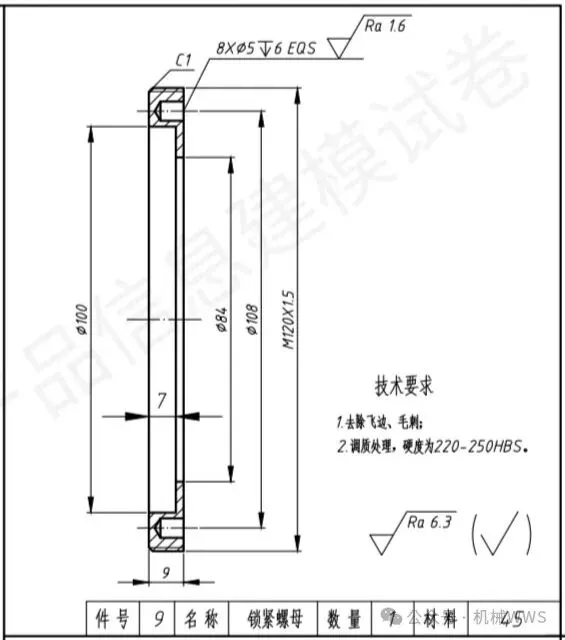
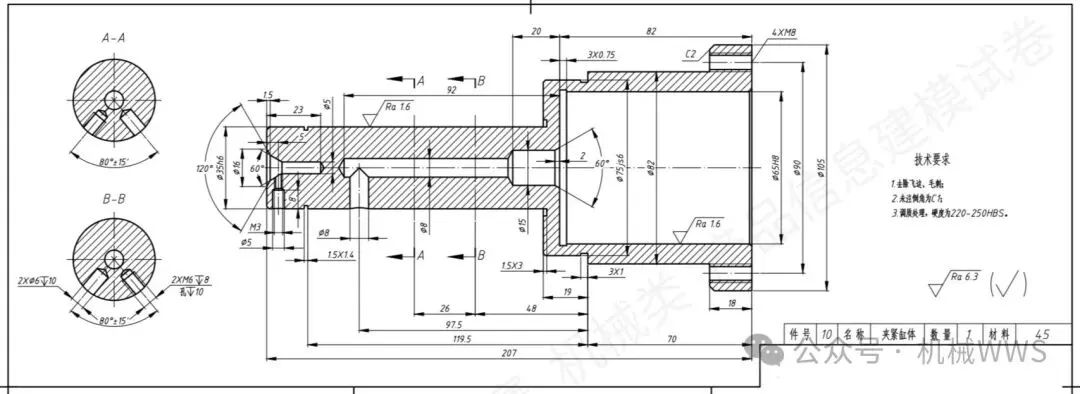
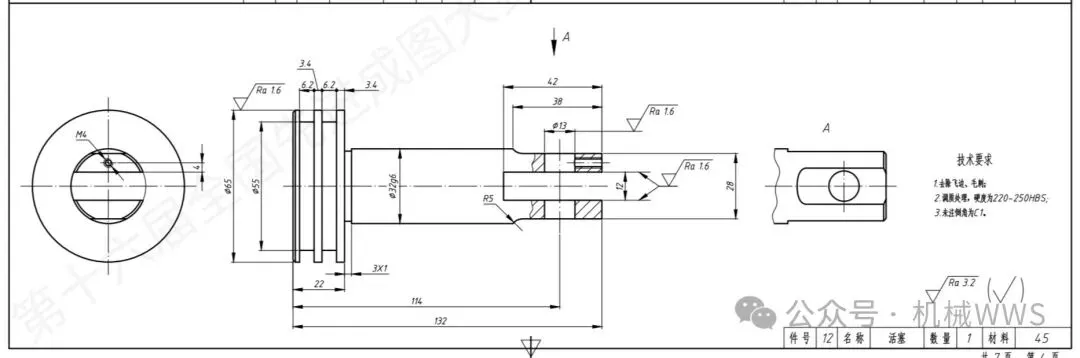
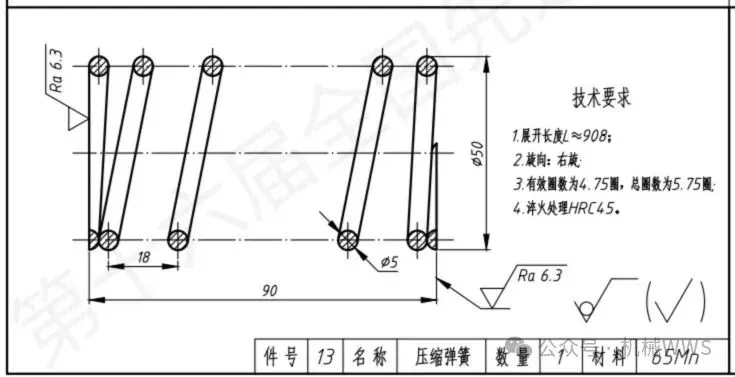
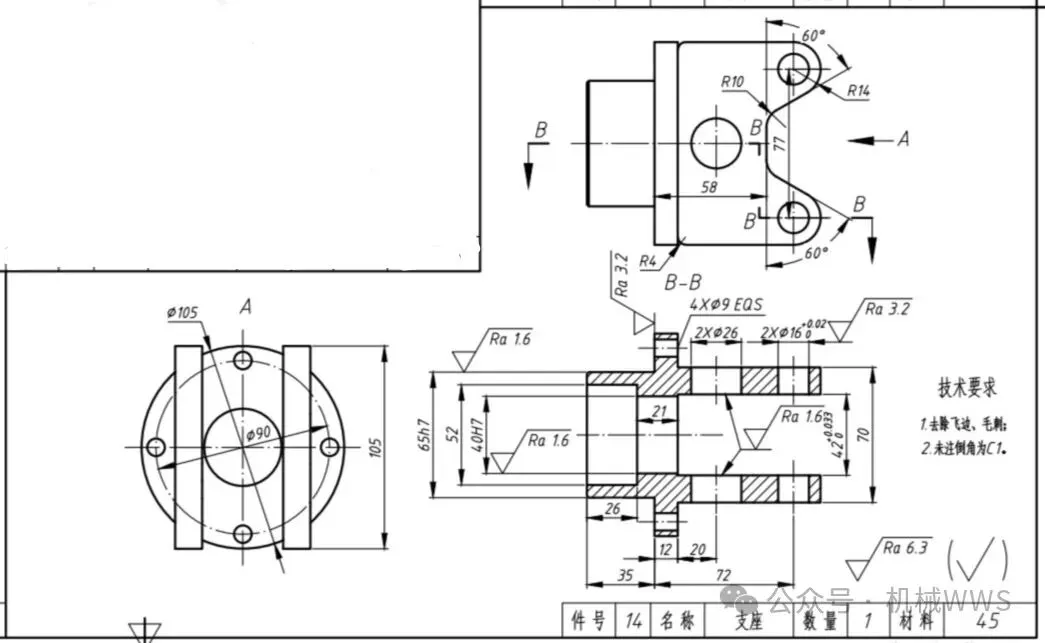
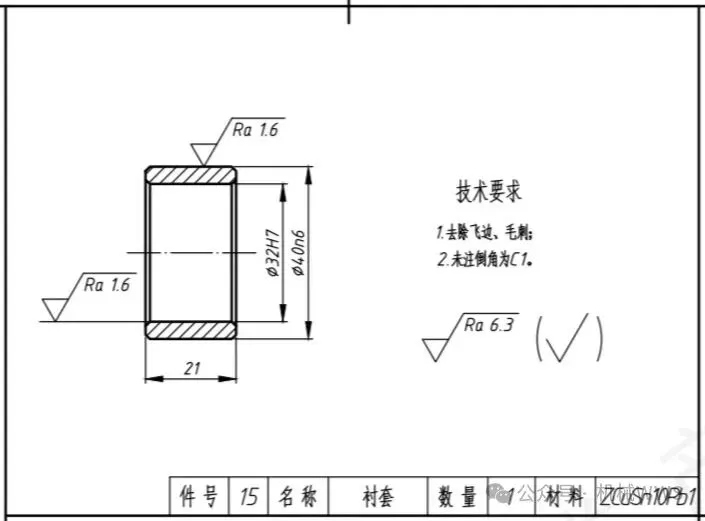
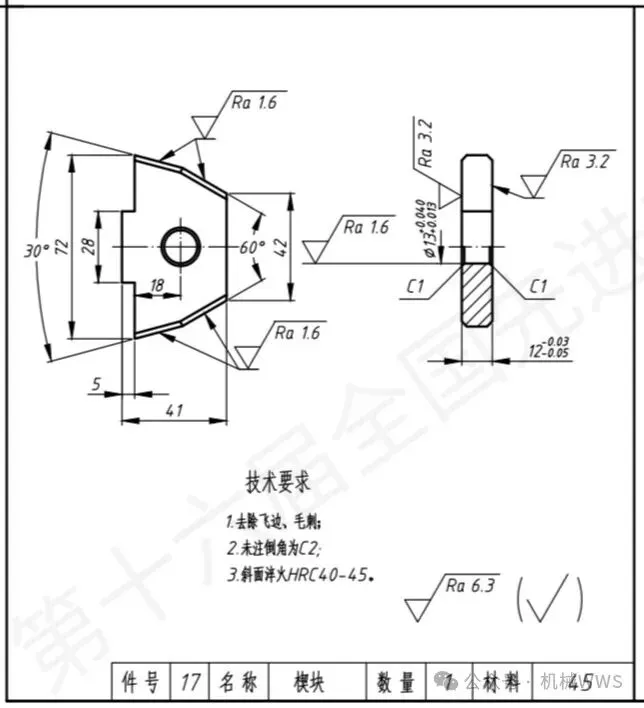
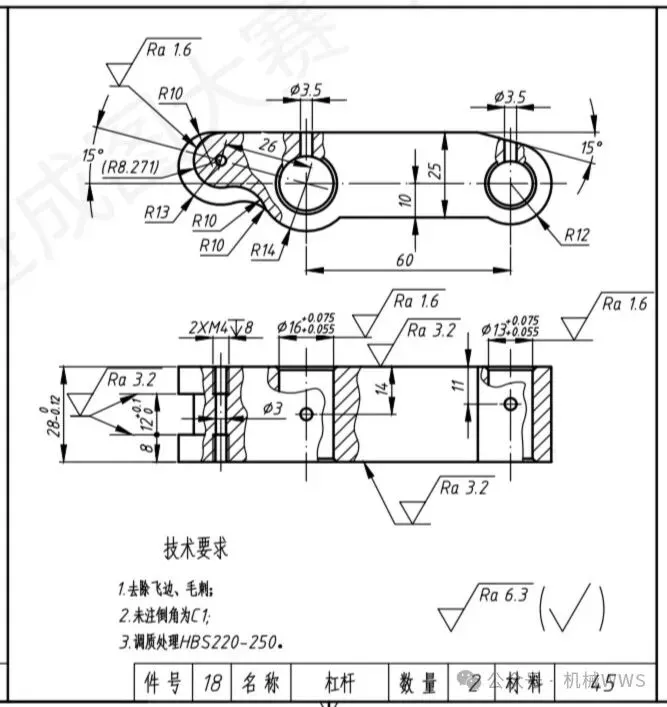
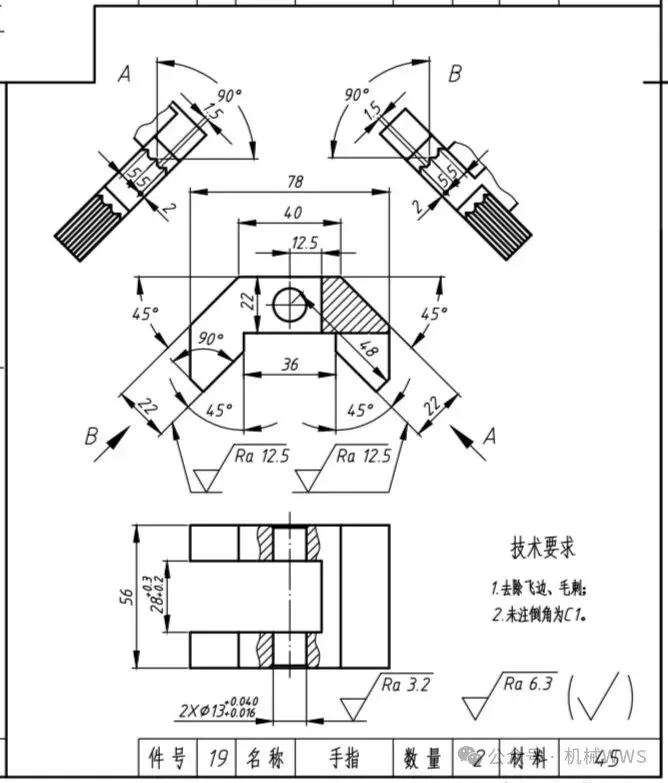
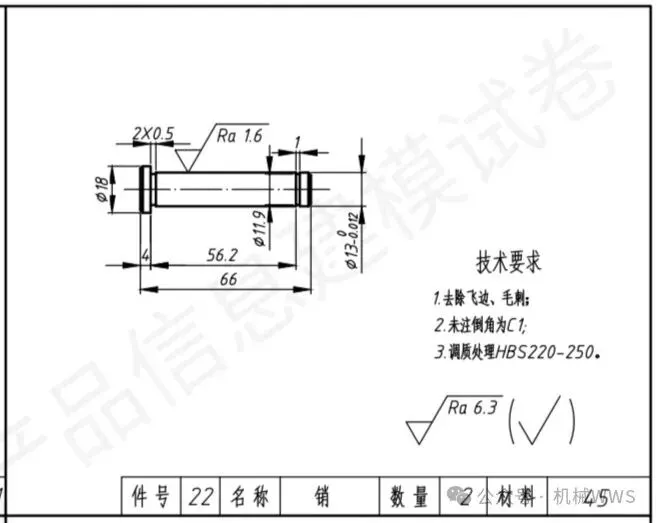
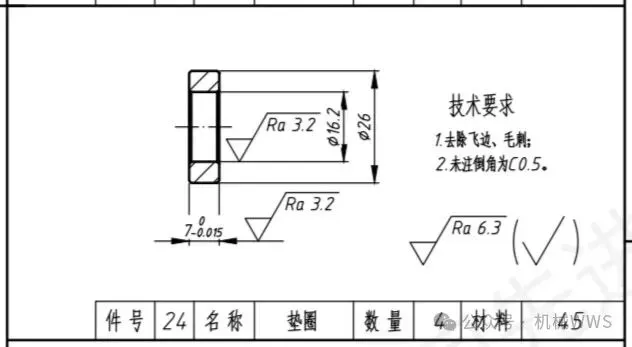
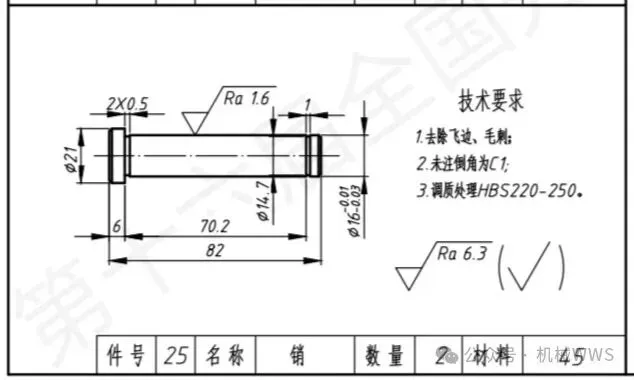
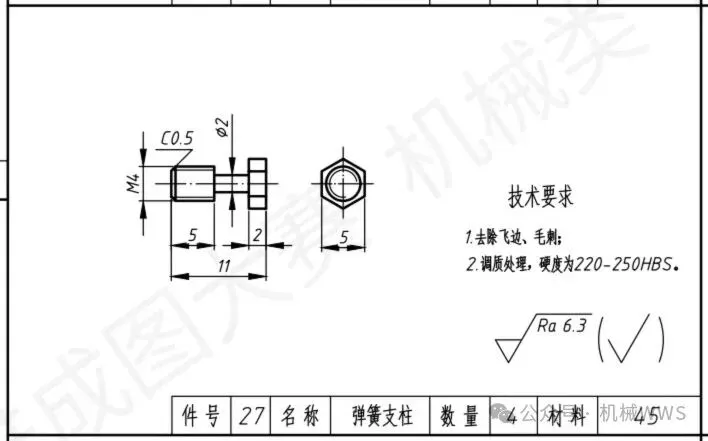
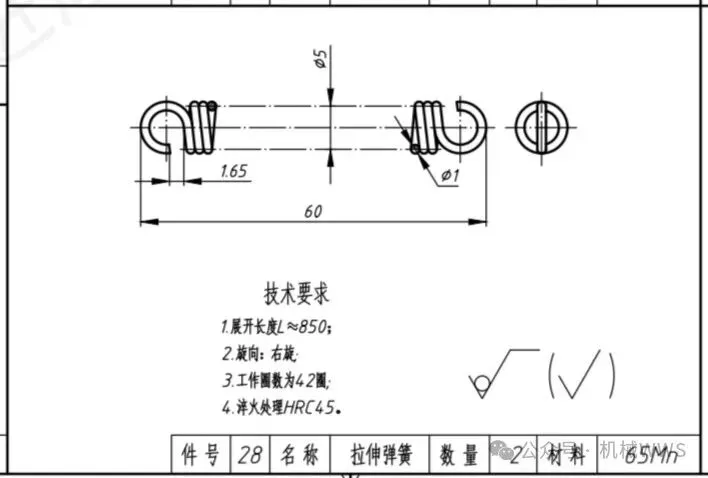
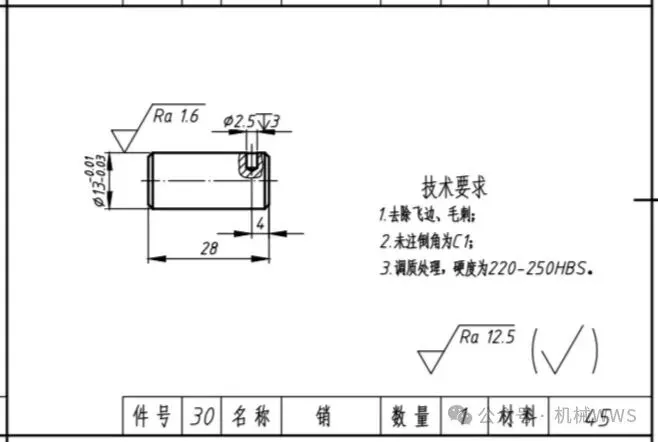
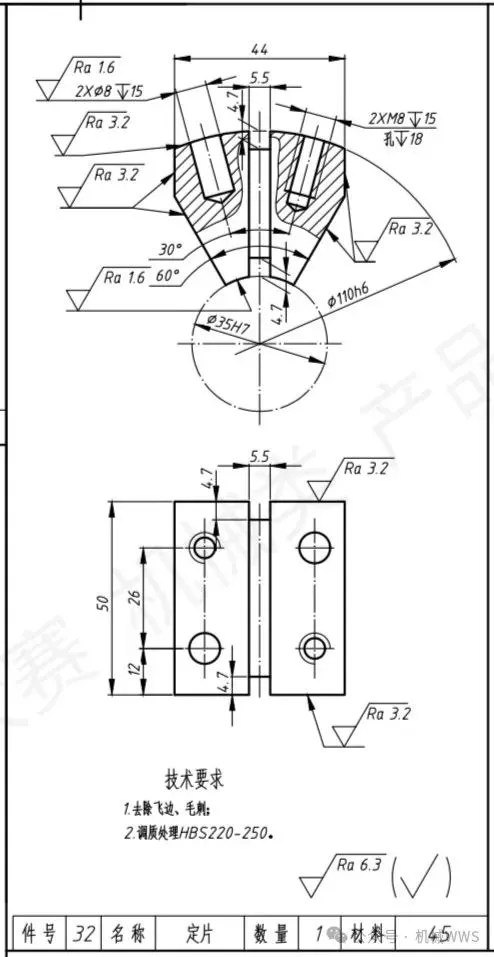
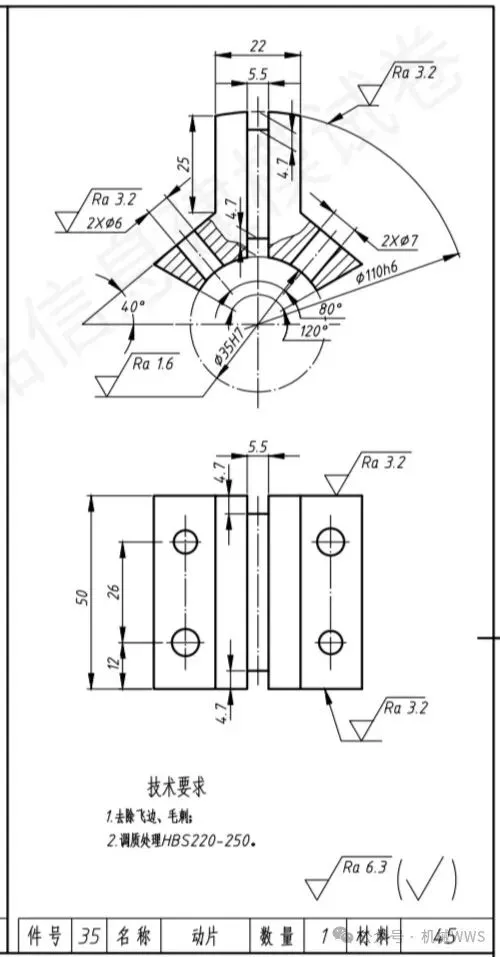
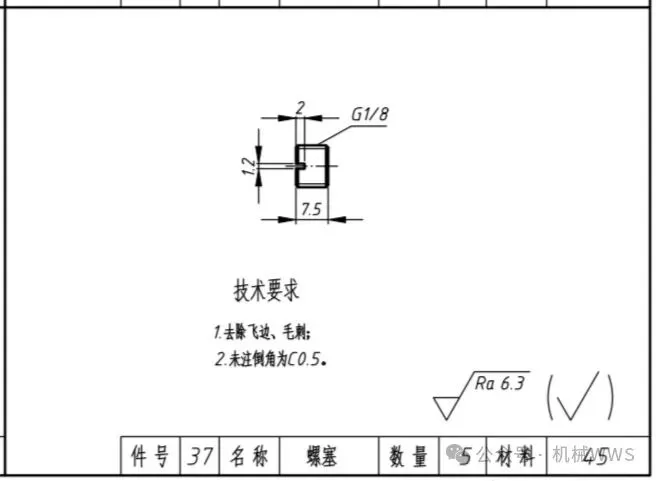
机械装配图纸:“机械手”(PDF格式图纸,底部自取) 机械手工作原理:该机械手的回转运动是由回转油缸4完成的,定片32和回转缸体4通过螺钉33和销34连接在一起,动片35和夹紧缸体10通过螺钉43和销44连接在一起,压力油由孔M和孔N进出油腔,实现机械手的旋转运动,旋转角度的极限值是由定片和动片之间允许的回转角度决定的。旋转位置的定位控制是由电位器进行检测并加以反馈控制的。该机械手的抓取动作是由楔块17和杠杆18来实现的,当压力油从孔P经由联接座1和后盖2中的油孔进入夹紧缸体10的左腔体,克服压缩弹簧13的压力,推动活塞12和楔块17向右移动,从而推动杠杆18绕着销25转动,使得手指19握紧工件。当控制动作的电磁换向阀换向时,夹紧油缸10左腔体中的油液回流邮箱,从而使楔块17和活塞12在压缩弹簧13的作用下得以复位,手指19在拉伸弹簧28的作用下松开工件。 装配图 零件图百度网盘链接:通过百度网盘分享的文件:1.机械手.pd… 链接:https://pan.baidu.com/s/1BD8992H5n4GxloCJoudcSg?pwd=r43t 复制这段内容打开「百度网盘APP 即可获取」
 夜雨聆风
夜雨聆风