 夜雨聆风
夜雨聆风从一个用AI的痛点说起
日常用 Claude Code ,一个绕不开的体验是:无脑审批流。前几次还仔细看看,后续更多是眯着眼睛看大致思路,始终要盯着屏幕,不断看终端上弹出的确认提示,按 y 或 n。
单独看每一次都不算什么。但当你让 Claude Code 连续跑几轮任务时,你的注意力就被绑在了终端窗口上。注意力一直集中在审批代码。LangChain 创始人 Harrison Chase 在他的万字长文里有一句精准的概括:瓶颈从实现转移到了评审。
能不能把这个审批环节"搬"到屏幕外?不再需要紧盯屏幕。
这几天在玩的StackChan 刚好能Agentic Engineering下这件事。
StackChan:一个开源的桌面机器人
问题是 StackChan 自带的固件不支持这些功能。其面向 M5Stack 的云端服务,和我们的场景差得远。
所以我基于 StackChan Local(github.com/xuruiray/stackchan-local)这个开源项目,从重写了固件。没有在原始固件上二次开发,而是用 ESP-IDF 从零搭建了一套新的固件架构,专门面向本地桌面场景。
开源项目架构
StackChan Local的原始设计目标是让 StackChan 通过局域网本地运行,由桌面端负责控制台和应用编排。整体架构分三块:
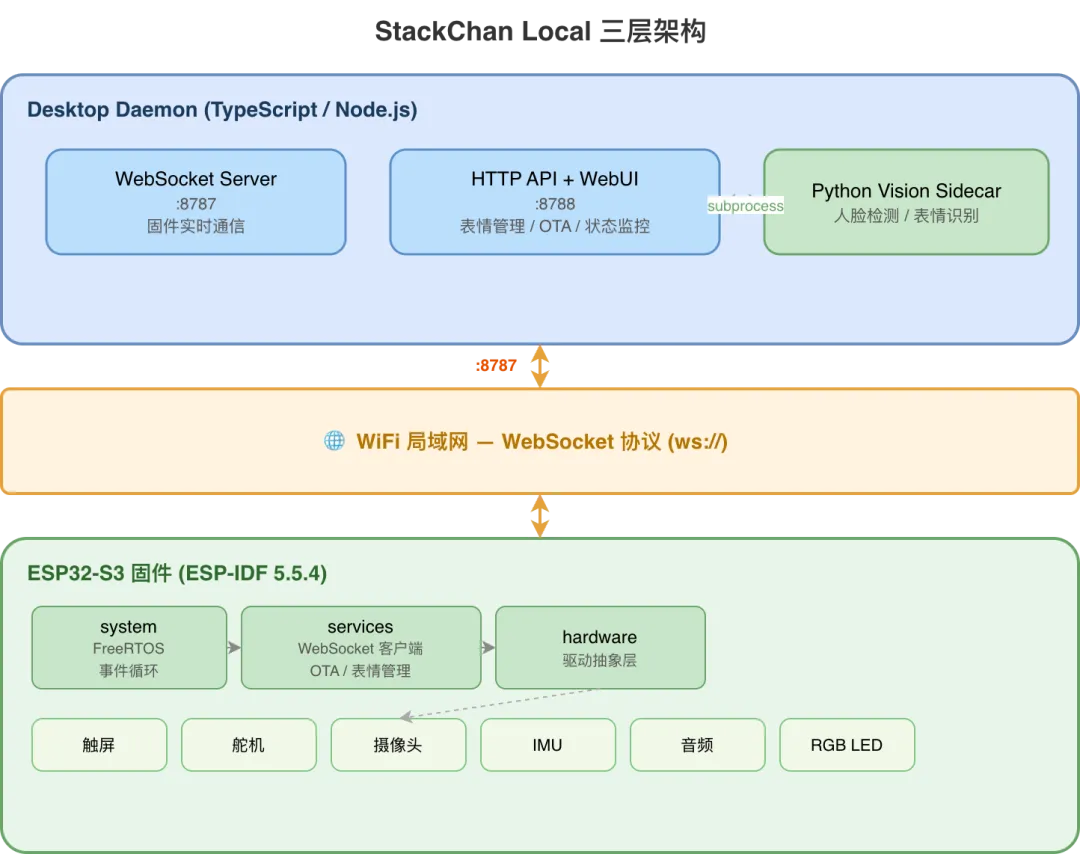
固件:三层架构
固件用 ESP-IDF 5.5.4 编写,明确分三层:
• hardware 层:板级配置、I2C/SPI 总线、各芯片驱动(摄像头 GC0308、触摸 FT6336、IMU BMI270、舵机、音频编解码器等)。只管硬件 IO,不碰任何业务逻辑。 • services 层:组合硬件驱动,编排应用行为。包括显示服务(LVGL 渲染)、运动服务(舵机控制)、传感器服务(遥测采集)、音频服务,以及最关键的 local_companion 服务:负责 WebSocket 连接、命令分发、遥测上报。 • system 层:启动顺序、系统上下文、生命周期管理、设置和诊断。
固件启动后主动通过 WiFi 连接局域网内的 Desktop Daemon,建立 WebSocket 长连接,保持心跳,等待命令下发。
Desktop Daemon:中间桥梁
Daemon 跑在 Mac 上,是固件和上层应用之间的桥梁(说白了就是个翻译器,把 HTTP 请求翻译成固件能懂的 WebSocket 命令)。它同时开两个端口:
• 8787 端口(WebSocket):等待固件连接。负责设备注册、心跳追踪、命令路由、遥测接收。 • 8788 端口(HTTP + WebUI):提供 REST 接口( /api/rgb、/api/expression、/api/hardware/*等)和浏览器控制台。控制台按芯片或硬件模块分页面,覆盖电源、触摸、IMU、摄像头、舵机、RGB、音频、网络等,每个模块独立展示遥测数据和支持的安全命令。
Daemon 还提供了 MCP 工具服务,让上层 Agent 可以直接查询设备状态、控制硬件。可选的 Python sidecar 通过 OpenCV 运行本地人脸位置检测,驱动舵机追踪。
通讯原理
所有通讯基于结构化的 JSON 协议,通过 WebSocket 传输:
握手:固件连接后发送 handshake(设备 ID、固件版本、硬件能力列表),Daemon 回复daemon.hello(协议版本、心跳间隔、功能特性)。命令下发:Daemon 向固件发送 robot.command,包含命令类型(say、moveHead、react等 13 种)和参数。固件收到后分发给对应服务执行,执行完回 ACK。遥测上报:固件持续向 Daemon 上报传感器数据(IMU 10Hz、电池状态 2Hz、摄像头帧可配置 FPS)和事件(触摸、按键等)。
这套架构天然具备(vibe coding)扩展性,任何能发 HTTP 请求的客户端都可以通过 Daemon 的 REST API 控制设备。接下来要解决的是:Claude Code 怎么接入。
Claude Code需求:从哪里拦截?
回到需求本身:Claude Code 每次要写文件、执行命令时,我们需要在它真正执行之前"拦一下",把操作信息发到 StackChan 上,等在触屏上确认后再放行。
这意味着我们需要一个拦截Hook。 之前研究Claude Code 安全时就知道,它提供了 Hook 机制:可以在工具执行前后插入自定义的 Shell 脚本。PreToolUse 钩子正好满足需求:在工具调用之前触发,脚本的退出码决定操作是否继续(exit 0 放行,exit 2 拒绝)。
第一层:Hook 脚本——拦截与转发
在项目的 .claude/settings.json 中配置 Hook(当然你根据你的需要可以放在Claude全局或项目级别):
{ "hooks": { "PreToolUse": [{ "matcher": "Write|Edit|NotebookEdit|Bash|mcp__filesystem__(write|edit|move)_file|mcp__github__(push_files|create_or_update_file)", "hooks": [{ "type": "command", "command": "scripts/confirm-hook.sh" }] }] }}matcher 用正则匹配所有写操作:写文件、编辑文件、执行 Bash 命令、GitHub 推送。每当 Claude Code 要执行写操作时,会先调用 Hook 脚本。
脚本通过 stdin 收到一份 JSON,包含工具名和操作参数。它的工作很直接:
解析操作信息:从 JSON 中提取工具名和目标(文件路径或命令内容),用一段 Python 做格式化。 构造请求体:打包成 { requestId, title, message, waitForResponse: true, timeoutMs: 60000 }。POST 到 Daemon:用 curl发送到http://<daemon-ip>:8788/api/claude/confirm。关键是 curl 会阻塞在这里,直到 Daemon 返回结果或自身超时(65 秒)。根据响应退出:解析 JSON 中的 response字段,confirmed→exit 0,cancelled或无响应 →exit 2。
# 核心逻辑(简化)resp=$(curl -s --max-time 65 -X POST http://IP:8788/api/claude/confirm \ -H "Content-Type: application/json" \ -d "$body")if [ -z "$resp" ]; then exit 2; fi # Daemon 不可用,拒绝result=$(echo "$resp" | python3 -c "import sys,json; print(json.load(sys.stdin).get("response","confirmed"))")[ "$result" = "cancelled" ] && exit 2 # 用户取消exit 0 # 放行这里有一个重要的设计选择:curl 是需要处理为同步阻塞的。脚本启动后,整个 Claude Code 的工具调用就停在这里,等设备那边做出决定。这正好是我们想要的效果:人不点,Claude Code 就不会继续下一步。
第二层:Daemon——HTTP 到 WebSocket 的桥接
Daemon 收到 /api/claude/confirm 请求后,需要把它翻译成固件能理解的 WebSocket 消息。
这里有两种模式:
• Fire-and-forget:发个命令过去,不等结果。适合展示通知类信息。 • 阻塞等待:发命令后卡住 HTTP 连接,直到设备回传用户操作或超时。这正是审批场景需要的。
Daemon 提供了 showConfirmAndWait() 方法来实现阻塞模式:
showConfirmAndWait(options): 1. 通过 WebSocket 向固件发送 showConfirm 命令 2. 在内存中注册一个 pendingConfirms[requestId] = { resolve, timer } 3. 启动 setTimeout 超时定时器 4. return new Promise(...) —— 阻塞在这里这个 Promise 什么时候 resolve?两种情况:
• 在设备上点了按钮:固件通过 WebSocket 发回 userResponse事件,Daemon 的 WebSocket 消息处理器根据requestId找到对应的 pending confirm,调用resolve()。• 超时:定时器触发,自动 resolve 为 { response: "timeout" }。
HTTP 连接一直挂着,直到 Promise resolve,然后把结果序列化为 JSON 返回给 curl。整个过程对 curl 来说就是同步阻塞的。它只是发了一个 HTTP 请求,等了一会儿,拿到了结果。
第三层:固件——LVGL 确认对话框
固件收到 showConfirm 命令后,由 local_companion 服务的命令分发器路由到显示服务,在 LVGL 上渲染一个确认对话框。
固件侧的实现要点:
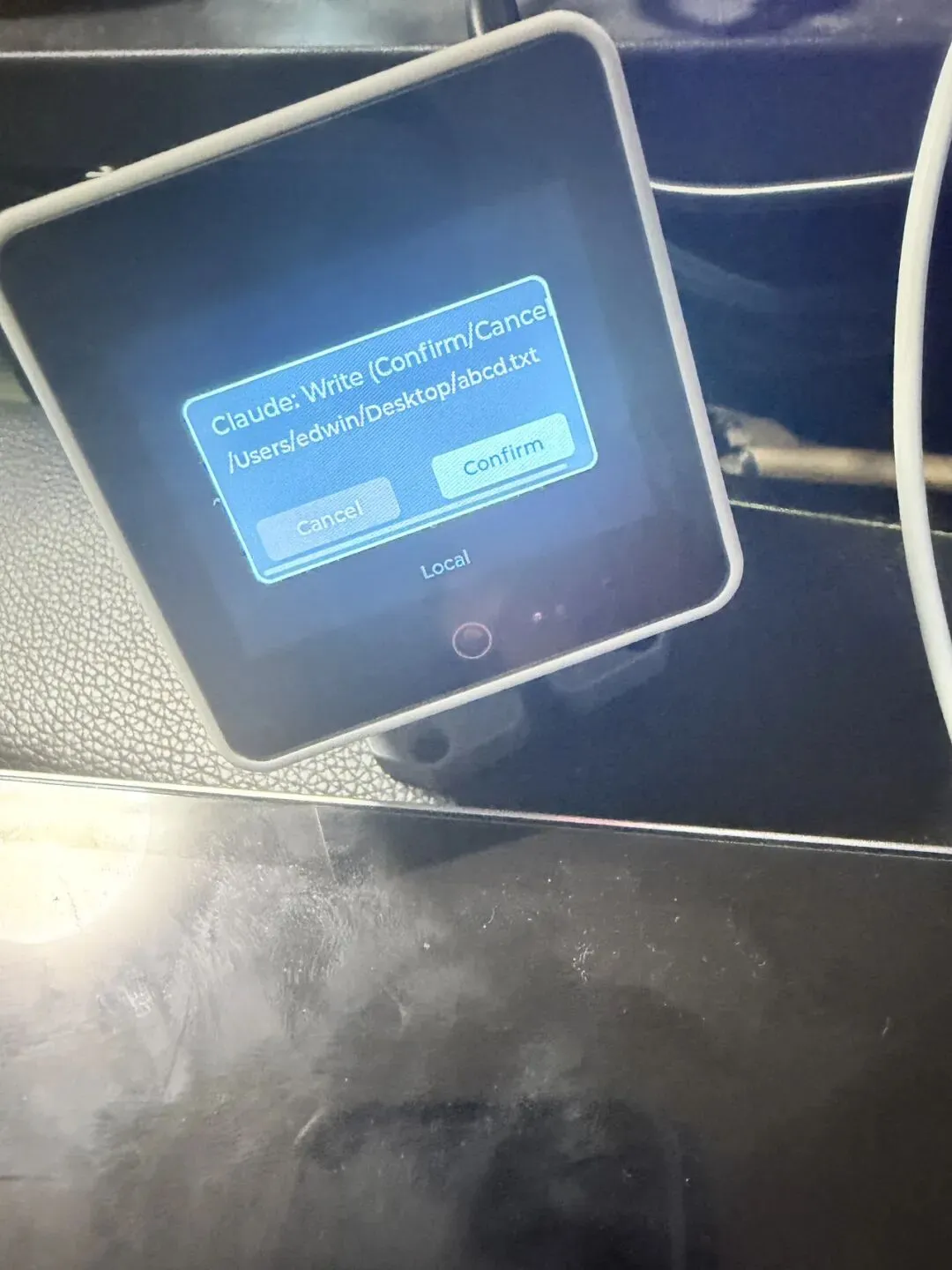
• 对话框渲染:用 LVGL 创建一个模态弹窗,显示标题(工具名)和消息(文件路径或命令),底部两个按钮 Confirm / Cancel。 • 触屏回调:FT6336 触摸驱动的点击事件绑定到按钮回调。用户点 Confirm,回调函数将结果写入 userResponse事件。• 事件回传: userResponse作为标准的robot.event通过 WebSocket 发回 Daemon,包含requestId和response(confirmed / cancelled)。• 超时兜底:如果用户一直不点,固件侧也有超时机制,自动关闭对话框并回传 timeout。
有个同步模型的细节值得提一下:Daemon 到固件之间是异步消息驱动的(发命令 → 等事件),但 Daemon 对外暴露的 HTTP 接口通过 Promise 把异步转成了同步阻塞。Hook 脚本只需要处理同步的 curl 调用,不用关心底层的事件等待逻辑。
把三层串起来
三层各自就位后,完整的数据流是这样的:
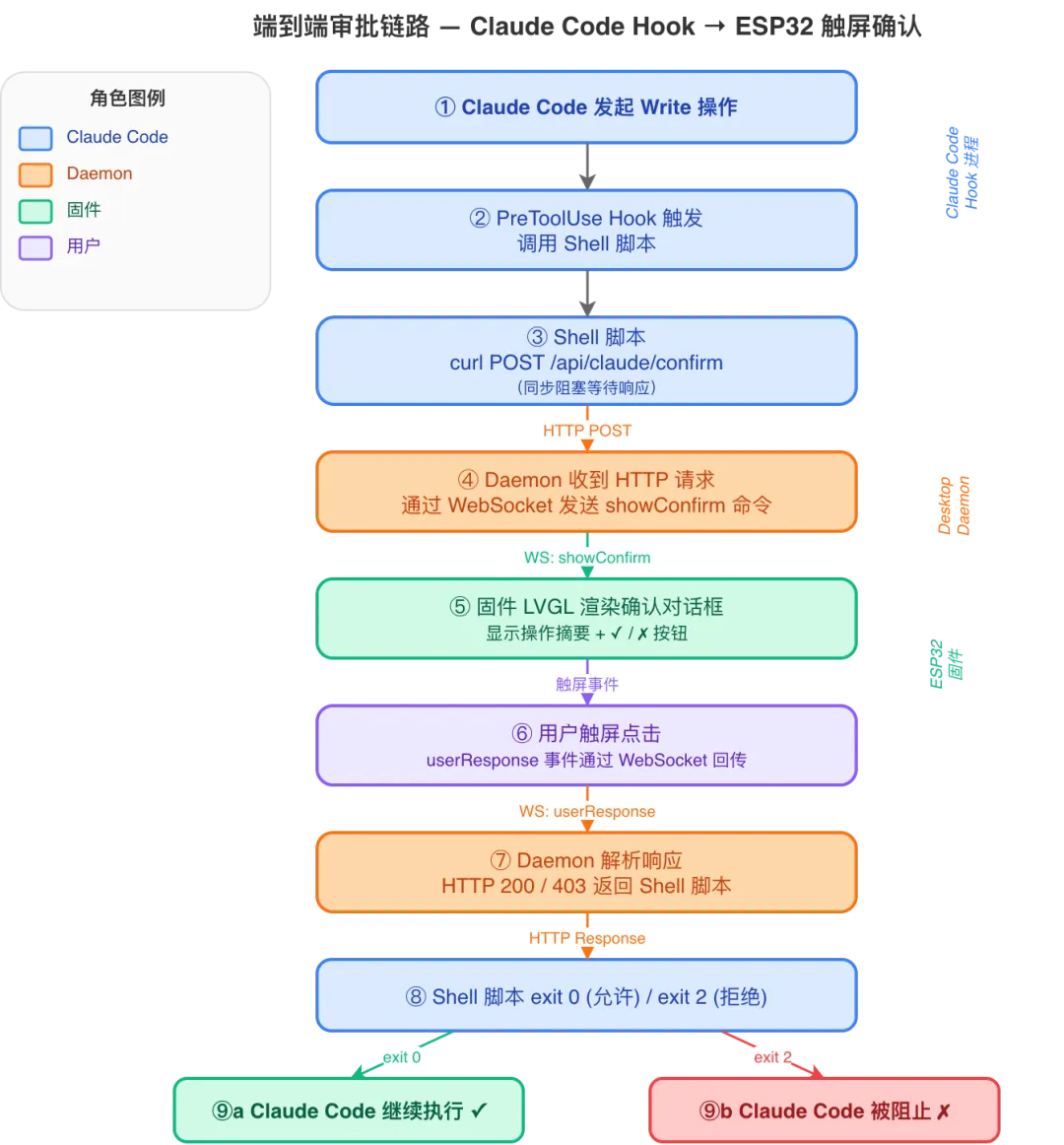
换个角度看:Claude Code 想改一个文件,StackChan 屏幕弹出对话框显示文件名,看一眼没问题就点 Confirm。回到电脑前发现操作已经完成了。审批不再需要再盯着屏幕。
潜在的不足:Claude Code的Hook目前没有降级机制
这套方案目前有一个短板。
Hook 脚本的退出码只有两种:exit 0(允许)和 exit 2(拒绝)。没有第三种状态。
这意味着:
• 当 Daemon 不可用时,curl 请求超时,脚本 exit 2,Claude Code 的所有写操作直接被拒绝。不是"回退到终端屏幕上弹出审批",而是硬拒绝(当然也可以默认通过,这样可能会导致失控)。• 当固件没连上时,Daemon 收到请求但没有设备可以弹窗,最终超时返回,同样是拒绝。 • Claude Code 的 Hook 机制本身不支持降级:它只认 exit code,没有办法在 Hook 失败时说"这个 Hook 无效了,请回退到你原来的审批流程"。
理想情况是 Hook 服务可用时走设备审批,不可用时自动回退到终端的 y/n 审批。但 Claude Code 目前没提供这种中间态。
这是当前方案最大的局限:它是一个"全有或全无"的设计。要么 StackChan 在线且正常工作,要么所有写操作都被卡住。你需要在配置里手动启用或禁用 Hook,来切换审批模式。
最后
说到底,StackChan 它做的事很简单:把操作审批从终端窗口挪到了桌上的一块触屏上。你扫一眼就知道 Claude 在干嘛,想放行点一下就行。一定意义上,算是向具身智能又走进了一步。
当然项目本身带了人脸追踪,你坐在附近,小机器人会歪着头看向你,你移动,它也跟随移动。当你走过去点 Confirm 的时候,它正好歪个头。用之前的话说:人类对物理运动的感知远比对屏幕文字的感知更本能。一个小小的歪头动作,就足以让你觉得它在跟你互动。审批的同时情绪价值拉满。
