 夜雨聆风
夜雨聆风最近有个朋友跟我说,他让 AI 帮他规划了一次出行路线。
AI给的方案特别完整:几点出发、走哪条路、午饭在哪吃。唯一的问题是,那个"推荐午饭餐厅"已经倒闭两年了。
这件事挺有意思的——一个能写出完整商业计划书的工具,却不知道某家小餐厅开没开着门。
这不是个例。它指向了一个更根本的问题:AI 到底懂不懂我们生活的这个世界?
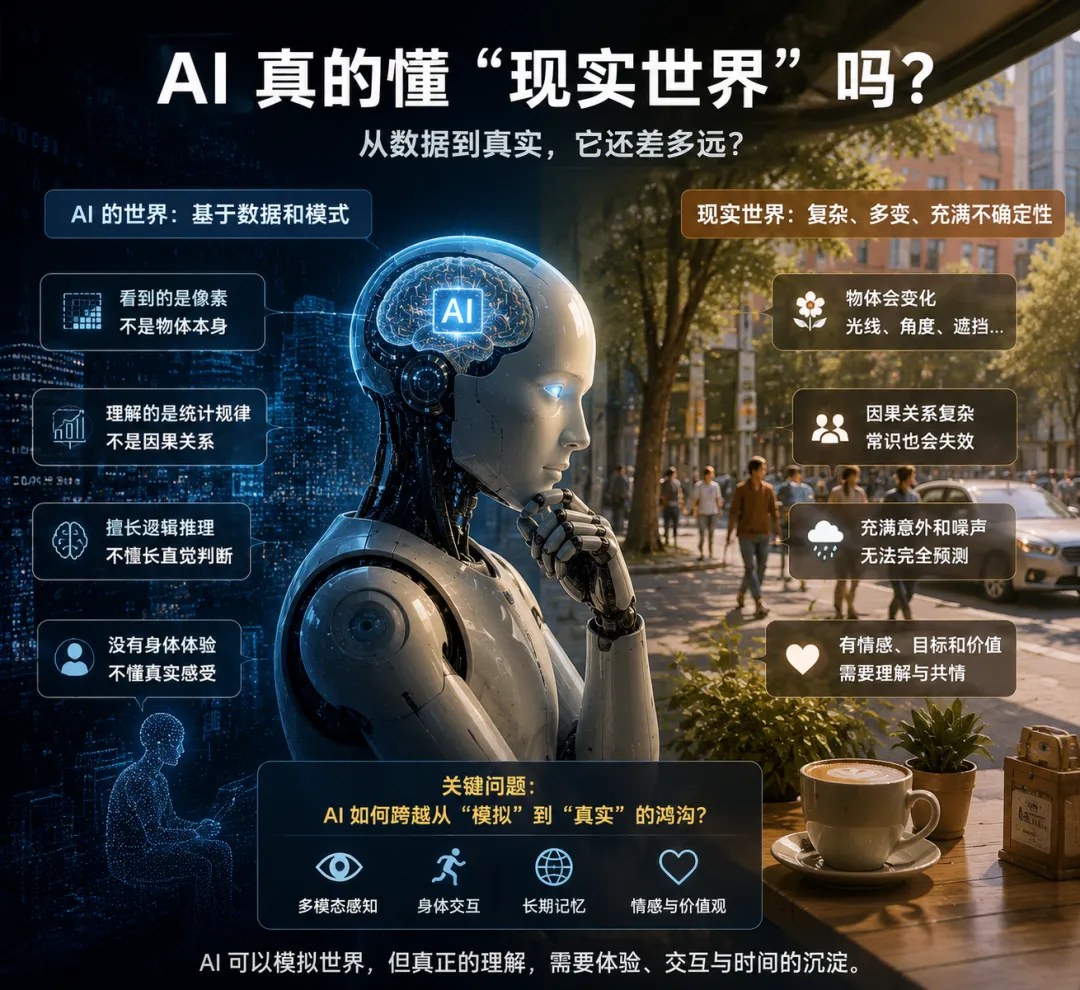
🧠 AI是怎么"理解"事物的
先搞清楚一件事:AI的"理解",和人的理解,从底层机制上就不是一回事。
人理解"冰块会融化",是因为小时候真的拿过冰块,感受过那股凉意从指尖传来,然后手心变湿的过程。这是经验,是感知,是身体记住的东西。
AI理解"冰块会融化",是因为它在训练数据里见过几百万次类似的句子,统计出这几个词经常一起出现,以及跟它们一起出现的上下文。
这是两条完全不同的路径。一个是"亲历",一个是"归纳模式"。前者对未见过的情况有一定的泛化能力,后者在超出训练分布的边界时,很容易翻车。
所以那个消失的餐厅,AI不是"懒得查",而是它根本没有接触"现实时间流动"的能力——它的知识是某个时间点的快照,不会自动更新,也感知不到真实世界里持续发生的变化。
📌 AI翻车的经典现场
不是说AI差,而是它的失误往往发生在人类觉得"这还用说吗"的地方。
🗺️ 导航与地图
大多数导航AI的核心逻辑是:匹配数据库里的道路信息,计算最优路径。但如果前方临时封路、修路、或者新开了一条捷径——它可能毫不知情,继续带你往墙上走。
更经典的是让AI规划"步行路线",有时候它会给你一条"直线最短"的路,但中间有一堵墙。地图上是通的,现实里不是。
🍳 AI菜谱的"玄学时刻"
网上有大量"AI写菜谱翻车"的记录。步骤逻辑上完全正确,食材搭配也没问题,但实际操作出来的东西……口感奇怪,甚至难以下咽。
原因说来也简单:AI从来没有吃过东西,也没有感受过"这个火候下锅里的变化"。它只是在模拟人类写菜谱的语言模式,而不是在复现一道真实的料理。
🤖 仓库机器人的困境
工业场景里,AI驱动的仓库机器人在测试环境下表现完美,但一旦进入真实仓库,就开始出现各种状况:货架摆放略有偏差,光线和实验室不同,偶尔出现没被预设过的障碍物……
这背后有个共同的根源:虚拟训练环境 vs 真实世界的不确定性。实验室是一个规则清晰、变量可控的地方。现实世界是混乱的、不完整的、充满意外的。AI在前者学到的经验,不能无缝迁移到后者。
🌧️ "懂"和"知道",不是同一件事
这里有一个很好的区分方式。
AI"知道"下雨——它能准确描述降水成因、告诉你明天带伞、写出关于雨的诗。
但它不"懂"下雨——不知道雨点打在脸上是什么感觉,不知道淋湿了鞋之后整个下午的那种难受,不知道为什么有人一闻到雨腥味就会想起某段记忆。
这个区别在大多数文字任务里无关紧要——你让AI帮你写一封邮件,它不需要"懂"你说的所有事情,只需要在语言层面组织得合理。但当AI开始介入现实物理决策的时候,这个区别就变得致命——一个不懂"楼梯有多陡"的AI,真的不该帮你做行动规划。
🔭 往后看:有没有解?
有,但没有想象中那么简单。
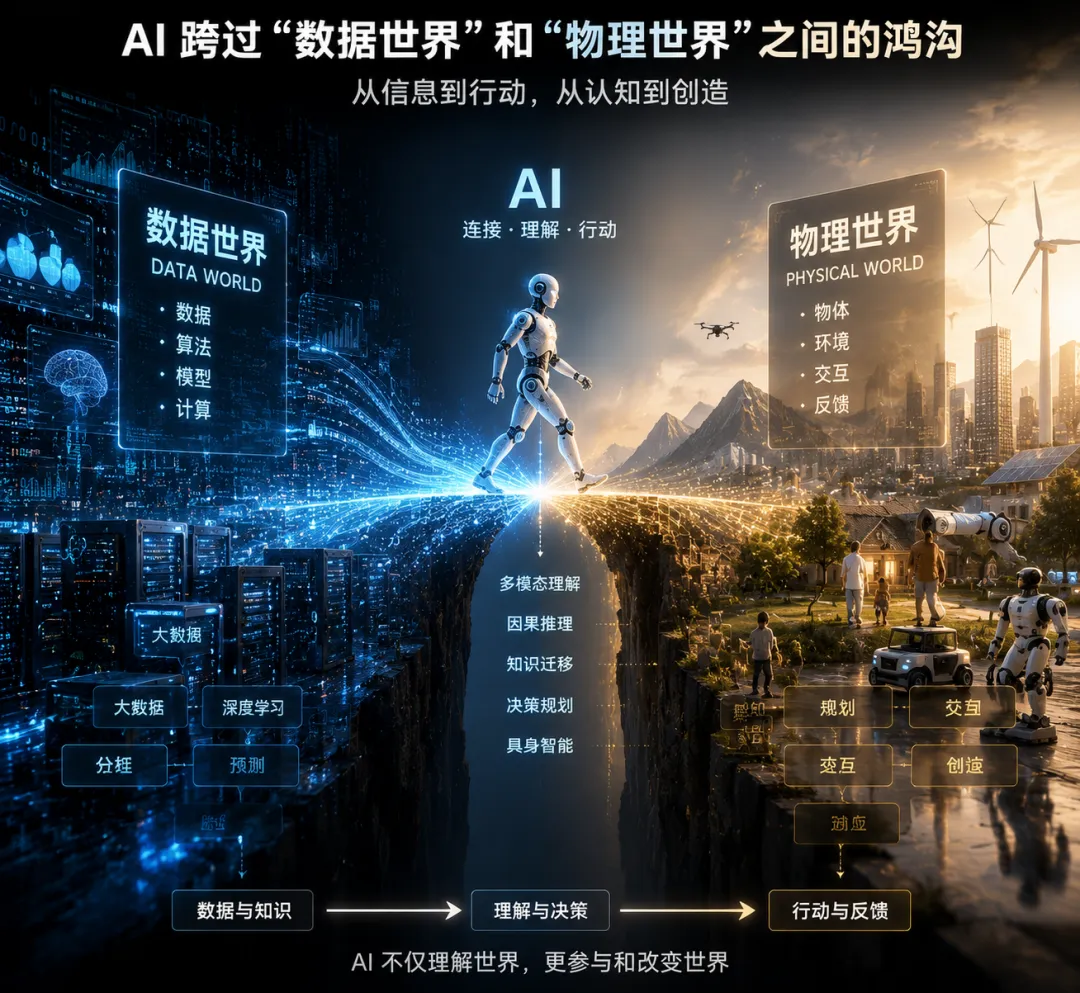
目前最被寄予希望的方向是多模态 + 具身智能。
多模态是让AI不只处理文字,还能接入视觉、声音、传感器数据,从而获得更丰富的"间接感知"。自动驾驶的激光雷达、机器人的触觉传感器,都属于这个路线。
具身智能走得更远——让AI"住进"一个身体里,在物理世界里行动、碰壁、试错,从真实交互中学习,而不只是从文本里归纳。
| 多模态感知 | ||
| 具身智能 | ||
| 实时联网 + RAG |
说到底,这些方向都是在努力缩小"数据世界"和"物理世界"之间的鸿沟,但目前还没有任何一种方法能真正弥合它。
💡 那我们该怎么用 AI
说了这么多局限,也别把AI放弃了——它真的很有用,只是用对场景很重要。
AI最擅长的:语言组织、模式识别、信息提炼、逻辑推演、已有知识的重新排列组合。AI最容易出错的:需要实时信息的判断、依赖物理常识的操作、超出训练分布的罕见情景、涉及人类感受和情感经验的细节。
最合理的用法,不是把AI当成全知全能的神,也不是因为它偶尔翻车就彻底不信任——而是清楚它的边界在哪里,把它放在它真正擅长的位置上。
它可以帮你写求职信,写得比你流畅;但面试那天走进陌生的办公楼,楼梯有多陡、前台的表情如何、面试官说话时的微妙停顿——这些,只有你自己能感知,也只有你自己能判断。
这不是AI的失败,是它的本质。
而人类经验的价值,就藏在这些AI无法触达的感知缝隙里。
