 夜雨聆风
夜雨聆风
矩阵超智创始人 张海星
数据就是智能”,从灵巧手到具身智能,张海星谈机器人产业的下一步
人形机器人和具身智能正在成为全球科技产业最受关注的方向之一。过去两年,从春晚舞台上的机器人表演,到各类展会、发布会上的人形机器人展示,机器人正在以前所未有的速度进入公众视野。与此同时,大模型技术的快速发展,也让越来越多人开始相信,机器人产业或许已经站在新一轮爆发的前夜。但热闹之外,一个更值得思考的问题是:当机器人真正走出实验室,进入工厂、商业场景甚至家庭之后,决定其竞争力的关键因素究竟是什么?
在MATRIX-3发布后,E-Creation对矩阵超智创始人兼CEO张海星进行了专访。从消费电子、新能源汽车,到自动驾驶和人形机器人,过去十余年来,张海星始终活跃在前沿科技产业的一线。曾在特斯拉等全球领先科技企业工作的经历,让他得以近距离参与前沿技术与产品创新。创办矩阵超智后,他则将创业方向进一步聚焦于人形机器人与具身智能。
在张海星看来,机器人既不是单纯的AI问题,也不是单纯的硬件问题,而是一套复杂的系统工程。真正决定机器人能力上限的,不只是模型与算力,更包括数据、控制、硬件、供应链以及真实场景中的持续迭代能力。围绕机器人行业的发展拐点、数据飞轮、具身智能、灵巧手工程化,以及中美机器人产业竞争等话题,E-Creation与张海星展开了一场深入交流。
❝从特斯拉到矩阵超智
E-Creation:从消费电子、新能源汽车,到自动驾驶和人形机器人,您的职业经历一直围绕前沿科技展开。机器人为什么会成为您最终投入创业的方向?
张海星:我一直把自己定义成一个“超级产品人”。从澳洲留学回来以后,我经历过很多不同的赛道,包括消费电子、新能源汽车、机器人、人工智能硬件设备,以及自动驾驶等领域。我自己一直有一个座右铭,叫Futuristic Technologism,也就是未来科技主义。在我看来,不管社会怎么变化、技术怎么迭代,每一个时代都会出现最前沿、最具代表性的产品。
过去这些年,我基本都在围绕这些方向工作。机器人之所以吸引我,是因为它和我之前接触过的所有行业都不太一样。它不是单纯的软件产品,也不是单纯的硬件产品,而是硬件、软件与AI能力最完整的融合。
因此,对我来说,进入机器人行业并不是一次刻意的转型,而是职业发展过程中一个非常自然的延续。在长期从事前沿科技产品研发与创新工作的过程中,我对于机器人产业的理解也越来越深入。从那个时候开始,我就越来越确定,人形机器人会成为未来非常重要的技术方向之一。很多创业者最终都会沿着自己积累最深、理解最透的领域继续向前探索。有人选择强化学习,有人选择具身智能,也有人选择灵巧手和本体研发,我也是一样。我觉得这更像是一种命运轨迹。
E-Creation:为什么最终选择回国创业,并且做人形机器人?
张海星:我觉得有一种“舍我其谁”的感觉。如果我们这些真正参与过行业前沿项目迭代的人都不做,难道没有参与过的人会更有优势吗?我并不这么认为。过去这些年,我们在之前的公司积累了大量工程经验。很多东西外界是看不到的,比如底层系统怎么搭建、产品怎么迭代、团队怎么协同、技术路线怎么选择,这些经验其实非常宝贵。
某种意义上讲,我们自己也像一个模型。模型需要训练、需要蒸馏、需要不断迭代,而我们这些团队其实也是一样的。过去几年参与这些项目的过程,本身就是一个被训练和被蒸馏的过程。所以当我们回到中国,利用中国完整的产业链重新把这些东西做一遍的时候,你会发现很多事情其实可以做得更好、更快。
我一直觉得,这个行业不存在突然从石头里蹦出来的天才。今天所有技术的发展,都是建立在前人已经积累的能力、论文、工业基础和工程经验之上的。我们这一代人的机会,不是推翻一切重新开始,而是在这些基础上,通过执行力和团队能力,把它们整合成真正能够交付给市场的产品。有一句话叫“时势造英雄,英雄造时势”。机器人行业的发展恰好给了我们这样一个机会,而我们过去的经历又刚好和这个时代的需求契合,所以最终走到了今天。

❝机器人风口真的来了吗?
E-Creation:这两年机器人频繁出现在春晚、演唱会等场景。您觉得机器人行业的风口已经来了吗?
张海星:我觉得风口已经来了,而且这一点其实是比较明确的。一个很重要的信号,就是央视连续两年在春晚舞台上展示机器人节目。很多人会把它看成一次表演,但我觉得它背后其实是在做大众教育。或者换句话说,是在帮助整个社会建立对机器人的认知。它是在告诉大家:机器人未来会进入生活场景,也会进入工作场景。
所以从行业发展的角度来看,这种社会认知的建立本身就是一个非常重要的标志。当然,风口来了,不代表行业已经成熟。我觉得真正的行业拐点还没有到。
E-Creation:您判断机器人行业真正的拐点会出现在什么时候?
张海星:我个人判断大概会在2028年到2029年前后。到那个阶段,人形机器人如果能够达到L3、L4级别,在非遥控状态下自主完成任务、自主决策,并且在必要的时候请求人类授权干预,那么它的商业价值会发生本质变化。
今天很多机器人已经能够做出不错的Demo,但距离真正成为生产力工具,还有一段距离。未来真正的拐点,我觉得会来自两个方面。第一个是能力拐点。当机器人能够稳定完成用户交给它的任务,我们不需要担心它摔倒、抓不住东西、把东西损坏,它才真正具备进入现实场景的基础。第二个是价格拐点。我认为如果全尺寸人形机器人能够做到15万元人民币以内,对于很多家庭来说,就已经进入了可以认真考虑购买的区间。现在五六十万元的机器人,其实更像奢侈品。但工业、科研和教育场景已经开始形成真实需求。高校、实验室、科研机构以及政府展示场景,其实都已经有明确的使用诉求。所以我觉得行业已经进入启动阶段,只是真正的大规模爆发还需要再往前走几年。
E-Creation:在您看来,决定机器人行业真正走向大规模普及的关键因素是什么?
张海星:我觉得不是某一个因素决定的,而是几个因素共同推动的结果。大家经常会讨论,大模型、硬件本体或者场景需求,到底谁更重要。但在我看来,它们其实是一种螺旋上升的关系。
如果机器人足够便宜,但不够智能,没有人愿意买;如果机器人非常智能,但价格始终降不下来,它也很难普及。所以行业最终拼的是两个东西:一个是能力,一个是成本。你既要达到用户能够接受的智能水平,也要达到用户能够负担的价格水平。谁先触达这个平衡点,行业就会迎来真正的爆发。而且这种爆发不会只属于一家企业。
因为机器人行业和新能源汽车行业有点类似。一旦有企业验证了这条路能够走通,整个产业链都会快速跟进。中国企业最大的特点就是学习速度和工程化速度非常快。很多时候,头部企业之间的差距并没有外界想象得那么大。可能领先的是半年,也可能是几个季度,但最终大家都会快速追上来。所以真正重要的,不是某一个单点能力,而是谁能率先把能力、成本和场景三件事情同时跑通。

❝为什么机器人是一套系统工程?
随着越来越多企业进入机器人行业,产业链分工正在变得越来越细。有人专注机器人本体,有人专注灵巧手,也有人聚焦具身智能模型。但在张海星看来,机器人最终交付给客户的并不是某一个单独模块,而是一套能够在真实场景中稳定运行的完整系统。
E-Creation:当前机器人行业正在出现不同的发展路线。有的公司专注本体,有的公司专注灵巧手,也有团队聚焦具身智能“大脑”。您怎么看这些不同路线?矩阵又是怎么做的?
张海星:我们一直把自己定义为一家垂直整合的机器人公司。长期来看,我们最终面向的一定是To C用户;但现阶段更多还是服务To B和To G场景。所以我们的逻辑一直是从场景出发,再反推产品。对于不同场景,我们会先去看它的工况和需求。客户对硬件性能有什么要求?对算法和AI能力有什么要求?这个任务到底是基于规则执行,还是需要学习和泛化能力?这些因素最终都会决定机器人应该长成什么样。从场景出发,而不是从产品出发所以我们不会先定义一个产品,再去寻找场景,而是从场景出发倒推产品。
从硬件角度来看,如果只做灵巧手,本质上更像一个零部件供应商。在我们看来,未来随着越来越多上市公司、汽车产业链企业进入机器人行业,很多今天看起来门槛很高的硬件能力,最终都会被快速复制和国产化。因此我们认为,手本身并不是最终产品,而是交付给客户解决方案中的一个组成部分。
从智能角度来看也是一样。有些团队认为只要把“大脑”训练好,客户自然会找上门,但现实并不是这样。客户需要的是具体场景里的解决方案。机器人到底是轮式、夹爪还是人形?使用什么样的手?价格是多少?这些都会影响最终部署效果。最终还是要回到真实场景,去看产品能力、模型能力、数据能力和部署能力能否形成完整闭环。所以在我们看来,机器人最终比拼的不是某一个模块,而是整体交付能力。本质上,它是一套完整的系统工程。
E-Creation:您一直强调机器人是一套系统工程。为什么这么说?
张海星:我举一个特别真实的例子。几个月前,我们内部测试机器人跳舞。机器人跳到一半突然摔倒了,腿一下软掉了。当时我们的第一反应是查算法。大家从代码开始排查,再检查通讯链路、线束连接和各种接口,几乎把所有可能的问题都查了一遍,但始终没有发现原因。最后继续往下追,才发现问题出在机器人内部一块通讯板上的Hub接口松动。后来再调查,发现供应商当时为了快速打样,使用了一块没有经过标准IQC流程的板卡,最终导致了这个问题。
这件事让我更加确信,机器人的问题不会按照软件、硬件或者算法来分类出现。如果你只做“大脑”,你会觉得模型没有问题;如果你只做硬件,也会觉得硬件没有问题。但最终机器人还是摔倒了。现实世界里的问题,往往同时涉及硬件、软件、通讯、供应链和制造工艺。所以如果没有完整的系统交付能力,你根本发现不了这些问题,更谈不上持续迭代。这也是为什么我们坚持完整的平台路线。
当机器人真正进入场景工作之后,它会持续产生新的数据,这些数据再反馈给模型,形成持续迭代的飞轮。我经常会思考一个问题:一家卖出100万台机器人的公司,和一家一台机器人都不卖、只授权“大脑”的公司,谁更有机会跑出来?我认为是前者。因为真实世界的数据无法替代。这就像特斯拉的FSD(Full Self-Driving,完全自动驾驶)一样。如果没有海量真实道路数据,再先进的算法也很难持续进化。机器人也是一样。最终能够推动机器人持续进化的,还是来自真实场景中的部署、反馈和数据闭环。

❝数据决定机器人的上限?
如果说系统工程解释了机器人为什么难做,那么数据则决定了机器人最终能够成长到什么程度。
过去几年,大模型的发展让整个行业重新认识到数据的重要性。但对于机器人而言,数据问题远比互联网世界更加复杂。因为机器人面对的不只是文本、图片和视频,而是真实的物理世界。机器人如何学习?训练数据从哪里来?仿真数据与真实数据应该如何结合?为什么很多机器人公司都在拼命采集数据?在张海星看来,机器人行业今天最大的瓶颈之一,不是模型,而是数据。“数据就是智能。”数据不是燃料,数据本身就是智能。
E-Creation:您一直强调“数据就是智能”。为什么您会这样理解机器人训练?
张海星:我一直认为,数据就是智能本身,甚至可以说数据就是模型本身。如果拥有足够多的数据,就有机会涌现出足够多的智能。
在我们看来,数据和智能本来就是同一件事情。如果没有数据,就不可能有真正的智能。这其实和人类学习是一样的。一个人想学会跑步、打球或者掌握一项新的运动,首先要经历大量训练。如果没有足够多的身体力学数据、动作数据和反馈数据,就不可能真正学会。机器人也是同样的道理。
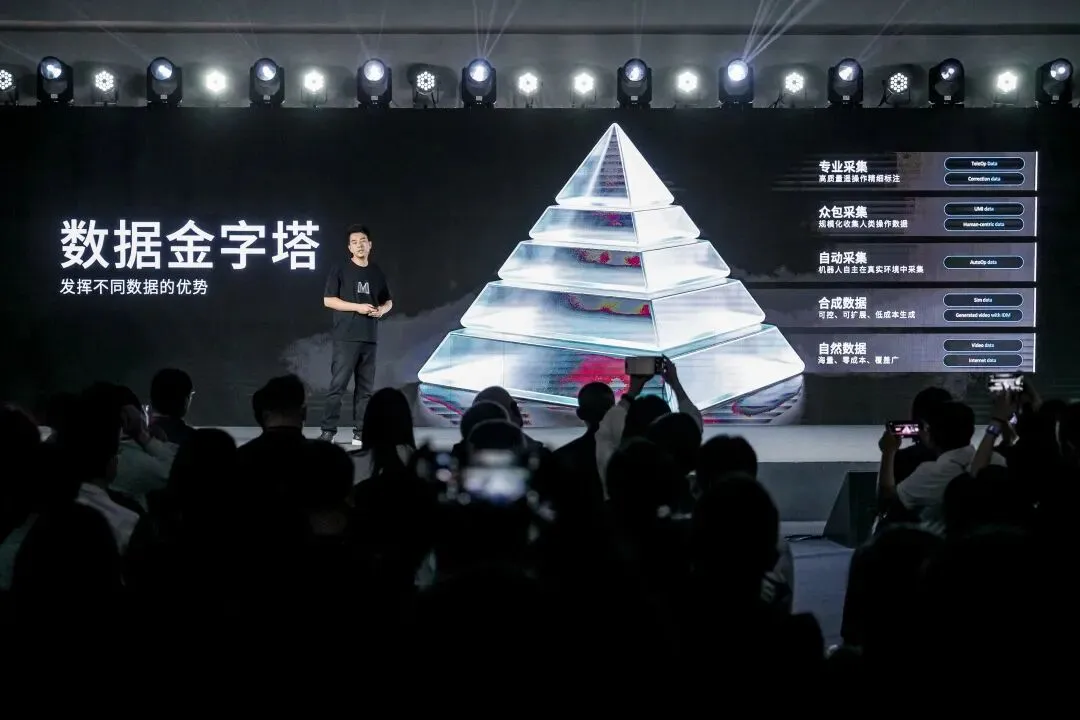
因此,我们会围绕数据建立完整的训练体系。矩阵内部有一套数据金字塔,包括合成数据、开源互联网第一人称数据、第三方数据以及后续场景部署过程中采集的真实数据。当机器人真正进入场景后,我们会利用机器人本体和专业遥操作设备采集数据,再针对具体场景进行后训练(Post Training)。随后把蒸馏后的模型重新部署回机器人,让它在真实环境中持续迭代。按照目前的进展,我们部分场景的一次部署成功率已经能够达到87%。如果要进一步提升到99%,本质上还是不断扩大有效数据、训练、评估和测试闭环的过程。
E-Creation:机器人行业为什么如此缺数据?
张海星:机器人行业今天最大的问题之一,就是缺少足够的数据燃料。互联网行业已经积累了二十多年的文本数据,但机器人行业并没有对应规模的数据沉淀。正因为如此,今天很多机器人公司都在“炼丹”。而且不同公司的数据来源并不一样。有的公司依靠自采数据,有的购买第三方数据,有的主要依赖仿真生成数据。
由于数据来源、质量和结构不同,最终训练出来的模型能力也会存在很大差异。所以机器人行业的发展节奏和互联网大模型并不完全相同。互联网拥有大量现成数据,而机器人面对的是物理世界,很多关键数据过去从未被系统化地采集和积累。从这个角度来说,机器人行业目前并不缺模型,而是缺足够规模、足够真实、能够持续积累的数据体系。
E-Creation:很多公司强调“大力出奇迹”,不断扩大数据规模。矩阵为什么更强调方法论?
张海星:我们并不迷信“大力出奇迹”。对于矩阵来说,数据策略一定是和场景ROI(Return on Investment,投资回报率)绑定在一起的。
我们会先判断一个场景是否值得落地,再反推需要多少合成数据、多少真机采集数据,而不是简单地追求数据规模越大越好。因为一旦底层模型结构发生变化,情况可能完全不同。如果未来出现了更高效的新模型、新研究方向,那么之前投入大量资源采集的数据,价值可能会迅速缩水。原本投入巨大的项目,最后甚至可能变成低效资产。
所以我一直认为,不要迷信某一种数据,也不要迷信单纯堆数据量。真正重要的是根据具体场景建立合适的数据策略,让数据采集、模型训练和商业落地形成闭环。对于机器人公司来说,数据当然重要,但数据如何获取、如何使用,以及是否能够持续创造价值,同样重要。
E-Creation:仿真数据和真实数据应该如何配合?
张海星:我认为仿真数据和真实数据并不是替代关系,而是互补关系。有些场景天然适合通过仿真完成,因为现实世界里根本无法安全地获取这些数据。比如一些极端情况或者危险场景。机器人执行设备操作时发生爆炸,或者需要处理具有风险的任务,这些数据真人不敢去采集,也不可能反复验证。这种情况下就只能依赖仿真。
所以在我看来,仿真数据最重要的价值,是补充长尾场景、危险场景以及现实世界难以获取的数据。另外,我们也会通过Value Model来进行价值观对齐。机器人不仅要知道怎么完成任务,还要知道什么是正确的、什么是人类希望它做的事情。因此,仿真数据更像是一种补充工具,用来覆盖真实世界中无法高效获取的部分场景,而不是替代真实世界本身。
E-Creation:机器人行业真正缺的是什么数据?
张海星:我觉得机器人行业真正缺的,还是自然数据。更准确地说,是自然数据里面包含的大量因果关系数据。举个简单例子。一杯水被打翻之后,会以什么样的形态洒在桌面上?水泼到机器人身上之后,电机受到什么影响?机器人在执行某个动作时,实际产生的力矩变化是什么样的?这些都是真实世界里的因果关系。
虽然今天仿真技术已经很强,但仿真终究不是真实世界。它可以逼近真实世界,但无法完全等同于真实世界。很多细节、扰动和反馈,只有在自然环境里才能产生。而机器人最终是要部署到真实世界中的。既然最终服务对象是真实世界,那么训练过程中最有价值的数据,也一定来自真实世界。所以在我看来,自然数据永远是机器人最重要的数据来源,而仿真数据更多是对自然数据的补充。
E-Creation:为什么失败数据同样重要?
张海星:很多人会关注机器人成功完成任务的数据,但实际上失败数据同样重要。因为机器人不仅要知道什么是对的,更要知道什么是错的。只有同时理解成功和失败,它才能真正形成稳定的决策能力。
我们训练机器人时,会通过反馈机制告诉它哪些动作是正确的,哪些动作是错误的。任务完成可以获得正向反馈,任务失败则会产生负向反馈。从训练角度来看,失败数据本质上是在帮助机器人建立边界。它能够告诉机器人:什么样的动作会导致失败;什么样的抓取方式不合理;什么样的决策会带来风险。同时,失败数据也是后续强化学习和模型迭代的重要基础。因为只有不断理解失败原因、纠正错误行为,机器人才能逐渐提高任务成功率。所以在我们看来,成功数据决定机器人能做什么,而失败数据决定机器人不会犯什么错误。这两者同样重要。
E-Creation:矩阵如何建立完整的数据闭环?
张海星:数据闭环是机器人训练里非常重要的一环。在矩阵,我们会通过不同设备和不同方式持续采集数据,包括机器人本体、假爪、五指灵巧手、外骨骼设备以及第一人称视角数据等。不同设备负责采集不同类型的数据,最终汇聚到统一的数据平台。
数据进入系统后,并不是直接用于训练。我们会先进行自动评估和自动标注,分析任务是否完成、动作是否合理、失败发生在哪个环节,然后再进入模型训练阶段。训练完成后,模型会重新部署回机器人,在真实环境中继续执行任务。新的执行数据又会回流到系统,形成下一轮训练和优化。所以在我们看来,机器人能力的提升并不是一次性的模型升级,而是持续的数据采集、评估、训练和部署循环。只有形成这样的闭环,机器人才能真正实现持续进化。
E-Creation:很多人把家庭场景称为机器人的“数据坟场”,您怎么看?
张海星:我其实不太认同“数据坟场”这个说法。相反,我认为家庭场景可能是未来最有价值的数据来源之一。
很多人觉得家庭环境过于复杂,每个家庭都不一样,所以机器人很难泛化。但换一个角度看,如果未来有100万台机器人进入家庭,每天都在执行任务,那么这些机器人就会持续产生海量真实世界数据。而且这些数据的价值非常高。因为它们来自真实用户、真实环境和真实需求,能够直接反映机器人在现实生活中的表现。这其实和自动驾驶的发展逻辑很像。自动驾驶之所以能够不断进步,很重要的原因就是大量车辆每天都在路上运行,不断产生新的真实数据。机器人未来也会经历类似过程。所以在我看来,家庭场景不是数据坟场,而是未来机器人最重要的数据飞轮之一。
E-Creation:家庭场景里最重要的数据是什么?
张海星:我认为最重要的并不是采集更多数据,而是采集真正有价值的数据。机器人进入家庭之后,并不意味着所有行为都值得记录和训练。关键还是要先回答一个问题:用户到底希望机器人帮他做什么。比如保持客厅整洁、整理茶几、收纳物品、清理厨房,这些都是用户真实存在的需求。如果机器人能够把这些高频需求做好,那么它产生的数据就具有价值。反过来,如果只是为了采集数据而采集数据,即便获得再大的数据规模,也未必能真正提升用户体验。
所以我们一直强调需求驱动。先找到用户最需要解决的问题,再围绕这些场景建立数据体系和训练体系。只有这样,数据才能真正转化成机器人能力,而不是变成无意义的数据堆积。
❝机器人的“大脑”与物理智能
随着大模型的发展,机器人对于语言理解和任务规划的能力正在快速提升。但对于机器人而言,理解任务只是第一步。真正的挑战在于,如何把理解转化为行动。从任务规划到动作执行,从“大脑”到“小脑”,机器人正在面对从数字世界走向物理世界过程中最核心的技术挑战。机器人真正的难点,不是理解,而是执行。
E-Creation:矩阵会自己做机器人大模型吗?
张海星:我们不会重复造轮子。今天无论是语言模型还是视觉模型,全球已经有很多优秀团队在做这件事情,包括OpenAI、Google以及国内的一些头部模型公司。
对于机器人企业来说,没有必要什么都自己从零开始做。我们更愿意接入当前最先进的基础模型能力。矩阵真正关注的是物理智能。因为机器人最终面对的是现实世界,而不是聊天窗口。它不仅要理解用户说的话,更重要的是把这些指令转化成真实世界里的动作,并最终完成任务。所以相比重新训练一个语言模型,我们更关注机器人如何理解环境、如何规划动作,以及如何稳定执行任务。这是机器人和纯软件AI最大的区别。
E-Creation:机器人真正的大脑是什么?
张海星:很多人会把大模型直接等同于机器人的大脑,但在我看来,机器人的大脑远不只是一个语言模型。真正的大脑应该是一个能够理解世界、理解任务,并能够做出决策的系统。它不仅包含语言能力,也包含行为数据、因果关系数据、价值观数据以及真实世界的反馈数据。最终,这些数据会在模型内部形成统一的表征空间(Latent Space)。机器人需要通过这些信息理解:当前环境是什么;用户希望我做什么;什么行为是正确的;什么行为会导致失败。这些能力共同构成了机器人的决策系统。所以在我看来,机器人大脑的本质并不是聊天能力,而是基于真实世界数据形成的理解、推理和决策能力。
E-Creation:机器人的“大脑”和“小脑”分别负责什么?
张海星:如果简单理解,大脑负责思考,小脑负责执行。大脑负责理解用户意图、任务规划和决策推理。
例如用户说:“帮我去厨房拿一瓶水。”大脑需要先理解这个任务,并拆解成多个步骤。但真正让机器人完成动作的是小脑。小脑负责运动控制、力控、平衡控制以及具体动作执行。比如抬手、抓取、行走、避障,这些都属于小脑的工作。而机器人最大的挑战之一,就是让大脑和小脑高效协同。因为两者处理的信息完全不同。大脑更多处理语义和推理,小脑则需要毫秒级实时控制。如何让任务规划与动作执行之间形成稳定连接,是机器人行业目前仍在解决的重要问题。从“听懂”到“做好”,中间还有很长的距离。
E-Creation:当前机器人最大的挑战,是理解任务还是完成任务?
张海星:如果放在几年前,很多人会认为最大的挑战是理解任务。但随着大模型的发展,机器人对于语言理解和任务拆解的能力已经提升了很多。今天更大的挑战,其实是在执行层面。
因为理解一件事情和真正把事情做好,中间还有很长的距离。机器人需要稳定地抓住物体、准确控制力度、在复杂环境里完成动作,同时保证效率和可靠性。很多时候用户觉得机器人“不够聪明”,实际上并不是因为它听不懂,而是因为它执行得不够好。所以从行业发展的角度来看,未来几年最大的突破很可能发生在物理智能和执行能力上,而不仅仅是语言理解能力。
E-Creation:什么长任务对于机器人来说特别难?
张海星:长任务最大的难点在于不确定性。举个例子,如果让机器人去三公里外的便利店买一瓶水,听起来只是一个任务,但实际上它需要面对大量实时变化的情况。它需要规划路线、识别环境、判断红绿灯、处理门槛、避开行人,还可能遇到各种临时情况。而且这些问题无法提前全部写进规则里。机器人必须在执行过程中持续感知环境、实时决策,并不断调整自己的行为。所以长任务真正难的地方,不是任务本身,而是在长时间执行过程中如何持续保持稳定决策和可靠执行。这也是为什么机器人距离真正的通用智能,还有很多工程问题需要解决。

❝从实验室到产业化
对于机器人行业而言,能够做出产品只是开始。真正的挑战往往出现在工程化、量产以及长期稳定运行阶段。过去几年,行业已经证明机器人能够完成越来越复杂的动作。但相比“能不能做出来”,企业更需要回答的问题是:能否长期稳定运行,能否规模化交付,以及能否在真实场景中持续创造价值。在张海星看来,未来机器人产业的竞争,最终仍然会回归工程能力与产业化能力。
E-Creation:MATRIX 的灵巧手给人留下了很深印象。在您看来,灵巧手真正难在哪里?
张海星:很多人看到灵巧手时,第一反应会觉得难点在算法或者控制系统。但实际上,当产品真正进入工程化阶段后,你会发现大量挑战来自材料、结构和制造本身。比如一根绳索、一根套管,看起来很简单,但在机器人内部长期高频运动的情况下,会涉及摩擦、磨损、温升、疲劳寿命等一系列问题。这些问题在实验室里可能并不明显,但一旦进入真实场景,机器人每天工作几个小时甚至十几个小时,问题就会被迅速放大。
所以灵巧手的难点并不只是“能不能做出来”,而是能否长期稳定工作,能否满足量产和交付要求。很多时候,一个优秀的机器人产品,背后解决的往往是大量看不见的工程问题。自由度越高,可靠性挑战越大。
E-Creation:高自由度灵巧手最难解决的问题是什么?
张海星:我认为最难的还是可靠性。自由度越高,系统复杂度就越高。每增加一个关节、一个执行器、一个传动结构,系统出问题的概率都会增加。
所以从行业角度来看,今天很多团队已经能够把高自由度灵巧手做出来,但真正拉开差距的,是能否长期稳定运行。这里面涉及机械结构、控制算法、材料选择、热管理以及供应链质量控制等多个维度。因为机器人最终是要进入真实场景工作的。用户不会因为你的技术路线先进,就接受频繁故障。对于客户来说,最重要的是它能不能持续工作、稳定工作。所以未来灵巧手竞争到最后,拼的不是自由度数字,而是可靠性和工程化能力。
E-Creation:您怎么看当前中美机器人产业的竞争格局?
张海星:如果看最前沿的机器人公司,我认为中美之间并不存在代际差距。在一些核心方向上,双方的差距可能只是几个季度的时间差。
美国的优势在于能够投入更多资源去做Frontier Research,也就是前沿探索。他们可以投入大量资金去尝试一些高风险、高不确定性的研究方向。而中国的优势则更加务实。中国拥有完整的制造体系和供应链能力,从零部件到整机量产,都能够快速推进。很多技术一旦验证可行,中国企业往往能够非常快地把它做成产品。所以我认为未来不会是单纯的技术竞争,而是技术创新能力和产业化能力的综合竞争。从这个角度来看,中国机器人产业依然拥有非常强的竞争力。
❝矩阵未来的发展
E-Creation:对于矩阵未来三年的发展,您最关注什么?
张海星:对于矩阵来说,这次发布会并不仅仅是展示一款机器人产品。更重要的是向外界展示我们的整体能力,包括机器人本体、具身智能模型、制造体系以及未来生态能力。
未来几年,我们最关注的仍然是产品和交付。无论是To B、To G还是未来的To C市场,最终还是要靠产品能力说话。机器人行业已经逐渐从技术验证阶段进入产品验证阶段。客户会越来越关注机器人到底能不能解决问题,能不能创造价值,而不是单纯看Demo。所以未来12个月、24个月甚至36个月,我们最核心的目标都是持续提升产品能力,把物理智能真正带入实际场景,让机器人能够创造真实价值。
END
转载须知
感谢您对E-Creation的关注与支持!💡如需转载本公众号的原创文章,请遵守以下规范:
请通过后台联系确认转载权限,联系请注明转载平台或机构名称,及微信公众号ID;
请勿对原文内容进行删改、曲解或二次编辑,须保持内容完整与原意一致;
E-Creation保留对所有原创内容的版权及解释权,如有违反,E-Creation保留依法追究相应法律责任的权利。
📢版权声明
本公众号所有内容均为原创作品,受《中华人民共和国著作权法》及相关法律保护。未经授权,任何机构或个人不得以任何形式转载、复制、改编或用于商业用途。
