文档内容
2025人教版新教材物理高考第一轮
第 5 讲专题提升 : 机械能守恒定律中的连接体问题
基础对点练
题组一 速率相等情境
1
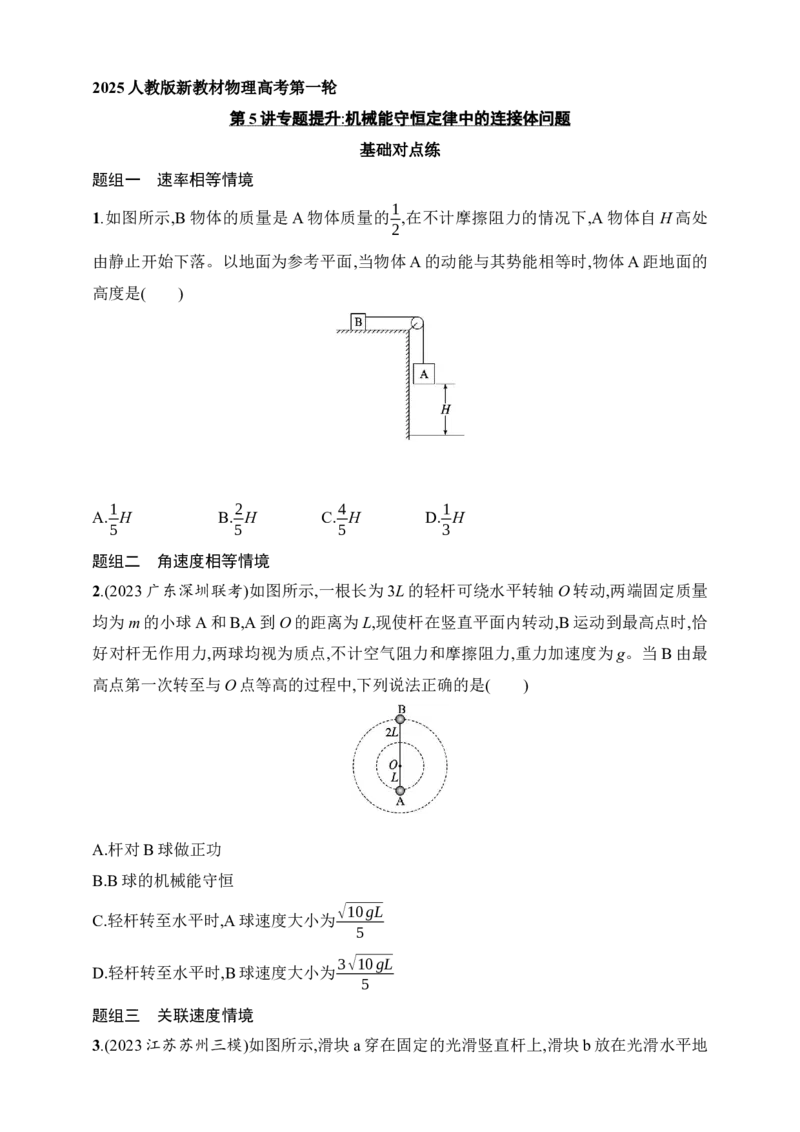
1.如图所示,B物体的质量是A物体质量的 ,在不计摩擦阻力的情况下,A物体自H高处
2
由静止开始下落。以地面为参考平面,当物体A的动能与其势能相等时,物体A距地面的
高度是( )
1 2 4 1
A. H B. H C. H D. H
5 5 5 3
题组二 角速度相等情境
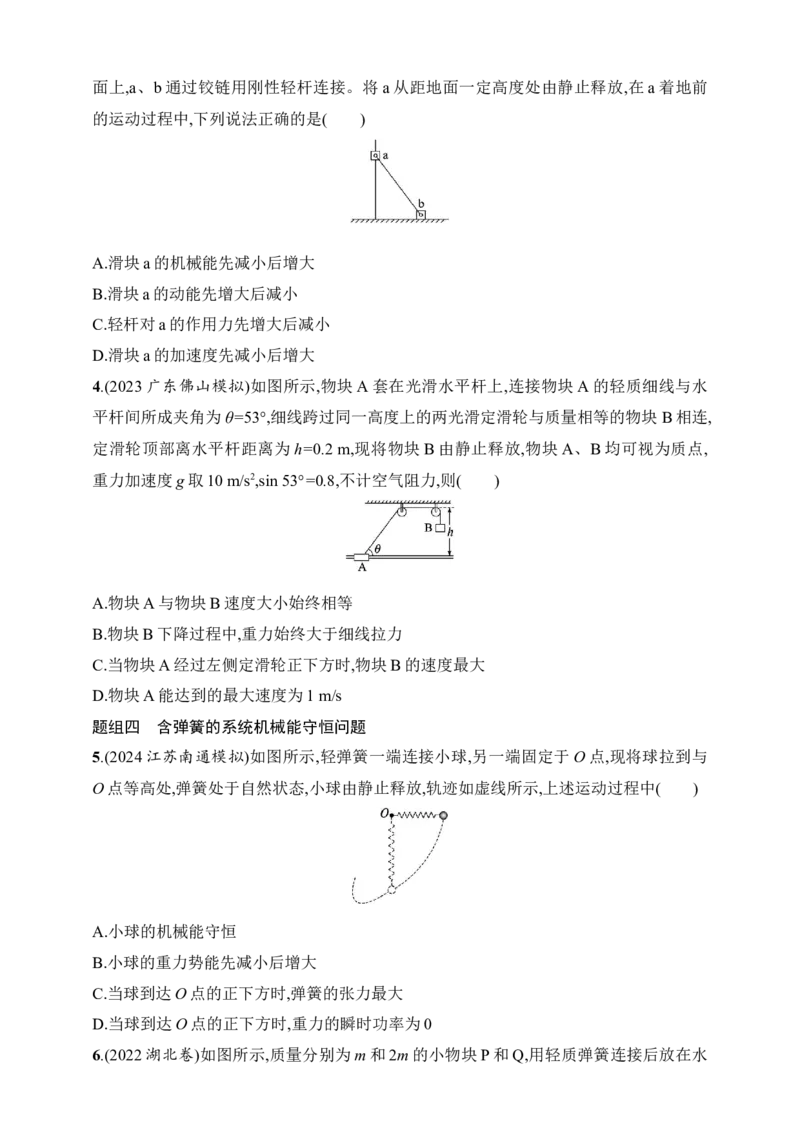
2.(2023广东深圳联考)如图所示,一根长为3L的轻杆可绕水平转轴O转动,两端固定质量
均为m的小球A和B,A到O的距离为L,现使杆在竖直平面内转动,B运动到最高点时,恰
好对杆无作用力,两球均视为质点,不计空气阻力和摩擦阻力,重力加速度为g。当B由最
高点第一次转至与O点等高的过程中,下列说法正确的是( )
A.杆对B球做正功
B.B球的机械能守恒
√10gL
C.轻杆转至水平时,A球速度大小为
5
3√10gL
D.轻杆转至水平时,B球速度大小为
5
题组三 关联速度情境
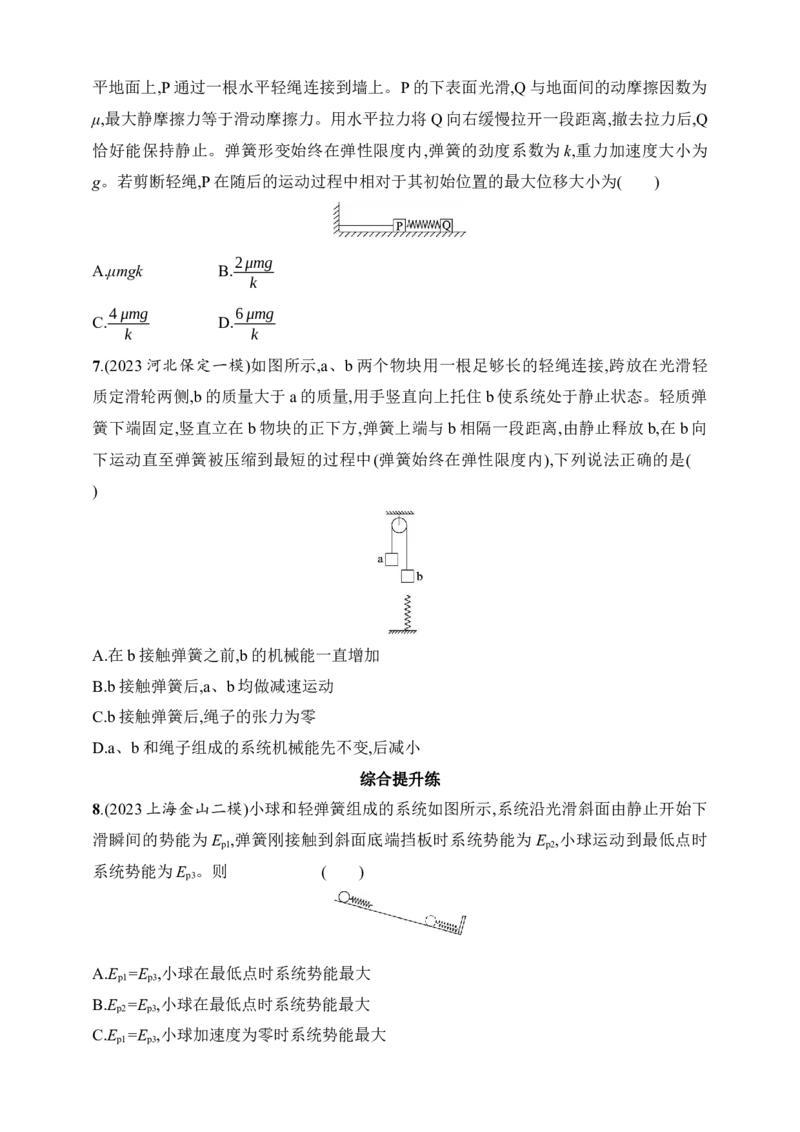
3.(2023江苏苏州三模)如图所示,滑块a穿在固定的光滑竖直杆上,滑块b放在光滑水平地面上,a、b通过铰链用刚性轻杆连接。将 a从距地面一定高度处由静止释放,在a着地前
的运动过程中,下列说法正确的是( )
A.滑块a的机械能先减小后增大
B.滑块a的动能先增大后减小
C.轻杆对a的作用力先增大后减小
D.滑块a的加速度先减小后增大
4.(2023广东佛山模拟)如图所示,物块A套在光滑水平杆上,连接物块A的轻质细线与水
平杆间所成夹角为θ=53°,细线跨过同一高度上的两光滑定滑轮与质量相等的物块 B相连,
定滑轮顶部离水平杆距离为h=0.2 m,现将物块B由静止释放,物块A、B均可视为质点,
重力加速度g取10 m/s2,sin 53°=0.8,不计空气阻力,则( )
A.物块A与物块B速度大小始终相等
B.物块B下降过程中,重力始终大于细线拉力
C.当物块A经过左侧定滑轮正下方时,物块B的速度最大
D.物块A能达到的最大速度为1 m/s
题组四 含弹簧的系统机械能守恒问题
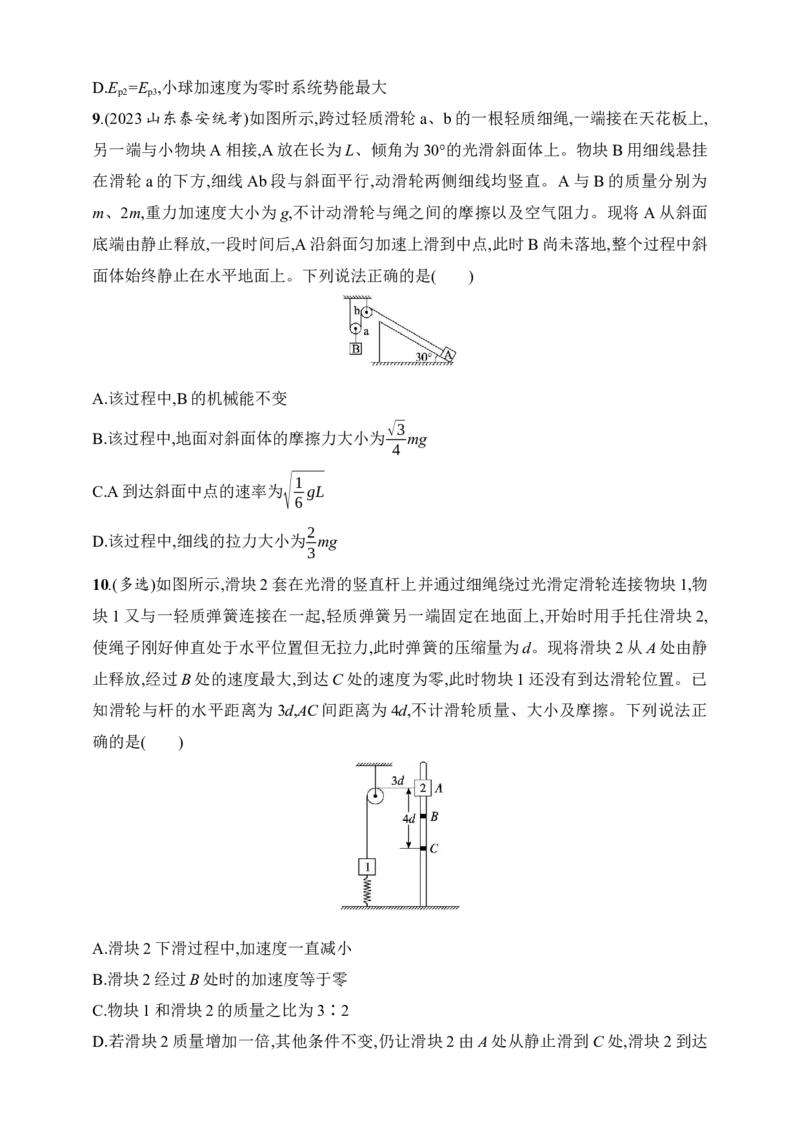
5.(2024江苏南通模拟)如图所示,轻弹簧一端连接小球,另一端固定于O点,现将球拉到与
O点等高处,弹簧处于自然状态,小球由静止释放,轨迹如虚线所示,上述运动过程中( )
A.小球的机械能守恒
B.小球的重力势能先减小后增大
C.当球到达O点的正下方时,弹簧的张力最大
D.当球到达O点的正下方时,重力的瞬时功率为0
6.(2022湖北卷)如图所示,质量分别为m和2m的小物块P和Q,用轻质弹簧连接后放在水平地面上,P通过一根水平轻绳连接到墙上。P的下表面光滑,Q与地面间的动摩擦因数为
μ,最大静摩擦力等于滑动摩擦力。用水平拉力将Q向右缓慢拉开一段距离,撤去拉力后,Q
恰好能保持静止。弹簧形变始终在弹性限度内,弹簧的劲度系数为 k,重力加速度大小为
g。若剪断轻绳,P在随后的运动过程中相对于其初始位置的最大位移大小为( )
2μmg
A.μmgk B.
k
4μmg 6μmg
C. D.
k k
7.(2023河北保定一模)如图所示,a、b两个物块用一根足够长的轻绳连接,跨放在光滑轻
质定滑轮两侧,b的质量大于a的质量,用手竖直向上托住b使系统处于静止状态。轻质弹
簧下端固定,竖直立在b物块的正下方,弹簧上端与b相隔一段距离,由静止释放b,在b向
下运动直至弹簧被压缩到最短的过程中(弹簧始终在弹性限度内),下列说法正确的是(
)
A.在b接触弹簧之前,b的机械能一直增加
B.b接触弹簧后,a、b均做减速运动
C.b接触弹簧后,绳子的张力为零
D.a、b和绳子组成的系统机械能先不变,后减小
综合提升练
8.(2023上海金山二模)小球和轻弹簧组成的系统如图所示,系统沿光滑斜面由静止开始下
滑瞬间的势能为E ,弹簧刚接触到斜面底端挡板时系统势能为 E ,小球运动到最低点时
p1 p2
系统势能为E 。则 ( )
p3
A.E =E ,小球在最低点时系统势能最大
p1 p3
B.E =E ,小球在最低点时系统势能最大
p2 p3
C.E =E ,小球加速度为零时系统势能最大
p1 p3D.E =E ,小球加速度为零时系统势能最大
p2 p3
9.(2023山东泰安统考)如图所示,跨过轻质滑轮a、b的一根轻质细绳,一端接在天花板上,
另一端与小物块A相接,A放在长为L、倾角为30°的光滑斜面体上。物块B用细线悬挂
在滑轮a的下方,细线Ab段与斜面平行,动滑轮两侧细线均竖直。A与B的质量分别为
m、2m,重力加速度大小为g,不计动滑轮与绳之间的摩擦以及空气阻力。现将 A从斜面
底端由静止释放,一段时间后,A沿斜面匀加速上滑到中点,此时B尚未落地,整个过程中斜
面体始终静止在水平地面上。下列说法正确的是( )
A.该过程中,B的机械能不变
√3
B.该过程中,地面对斜面体的摩擦力大小为 mg
4
√1
C.A到达斜面中点的速率为 gL
6
2
D.该过程中,细线的拉力大小为 mg
3
10.(多选)如图所示,滑块2套在光滑的竖直杆上并通过细绳绕过光滑定滑轮连接物块1,物
块1又与一轻质弹簧连接在一起,轻质弹簧另一端固定在地面上,开始时用手托住滑块2,
使绳子刚好伸直处于水平位置但无拉力,此时弹簧的压缩量为d。现将滑块2从A处由静
止释放,经过B处的速度最大,到达C处的速度为零,此时物块1还没有到达滑轮位置。已
知滑轮与杆的水平距离为 3d,AC间距离为4d,不计滑轮质量、大小及摩擦。下列说法正
确的是( )
A.滑块2下滑过程中,加速度一直减小
B.滑块2经过B处时的加速度等于零
C.物块1和滑块2的质量之比为3∶2
D.若滑块2质量增加一倍,其他条件不变,仍让滑块2由A处从静止滑到C处,滑块2到达C处时,物块1和滑块2的速度之比为4∶5
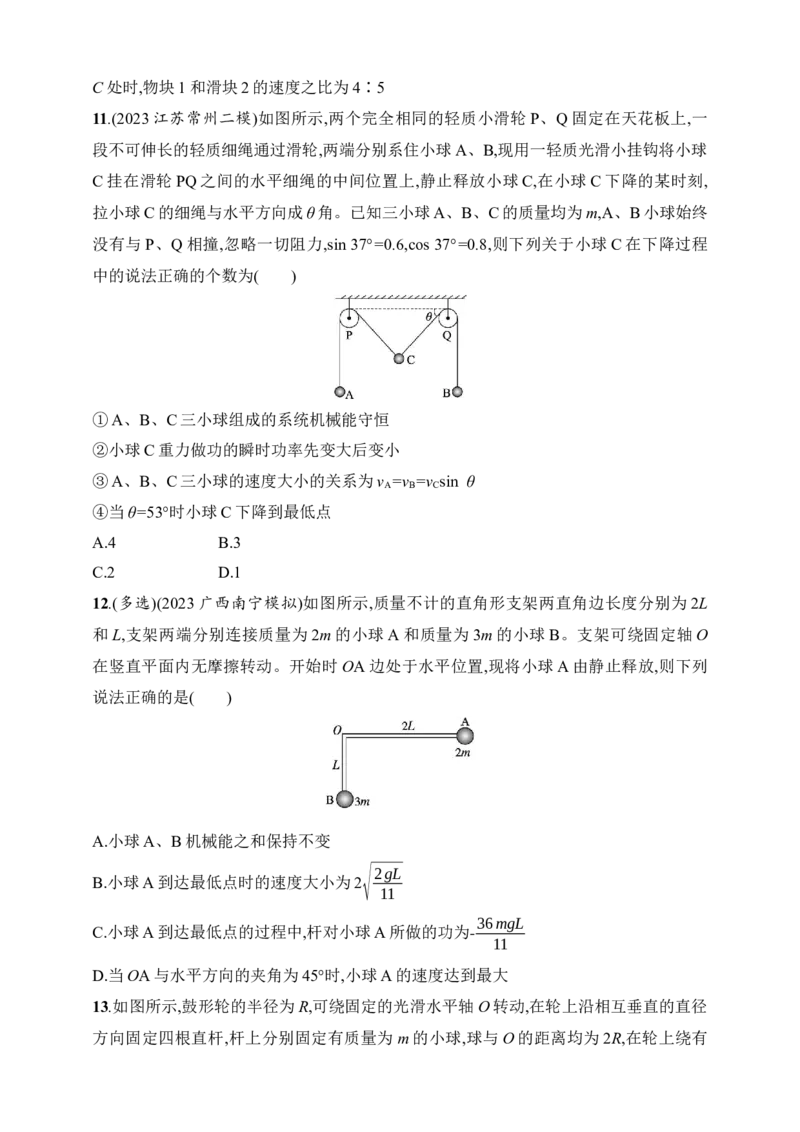
11.(2023江苏常州二模)如图所示,两个完全相同的轻质小滑轮P、Q固定在天花板上,一
段不可伸长的轻质细绳通过滑轮,两端分别系住小球A、B,现用一轻质光滑小挂钩将小球
C挂在滑轮PQ之间的水平细绳的中间位置上,静止释放小球C,在小球C下降的某时刻,
拉小球C的细绳与水平方向成θ角。已知三小球A、B、C的质量均为m,A、B小球始终
没有与P、Q相撞,忽略一切阻力,sin 37°=0.6,cos 37°=0.8,则下列关于小球C在下降过程
中的说法正确的个数为( )
①A、B、C三小球组成的系统机械能守恒
②小球C重力做功的瞬时功率先变大后变小
③A、B、C三小球的速度大小的关系为v =v =v sin θ
A B C
④当θ=53°时小球C下降到最低点
A.4 B.3
C.2 D.1
12.(多选)(2023广西南宁模拟)如图所示,质量不计的直角形支架两直角边长度分别为2L
和L,支架两端分别连接质量为2m的小球A和质量为3m的小球B。支架可绕固定轴O
在竖直平面内无摩擦转动。开始时 OA边处于水平位置,现将小球A由静止释放,则下列
说法正确的是( )
A.小球A、B机械能之和保持不变
√2gL
B.小球A到达最低点时的速度大小为2
11
36mgL
C.小球A到达最低点的过程中,杆对小球A所做的功为-
11
D.当OA与水平方向的夹角为45°时,小球A的速度达到最大
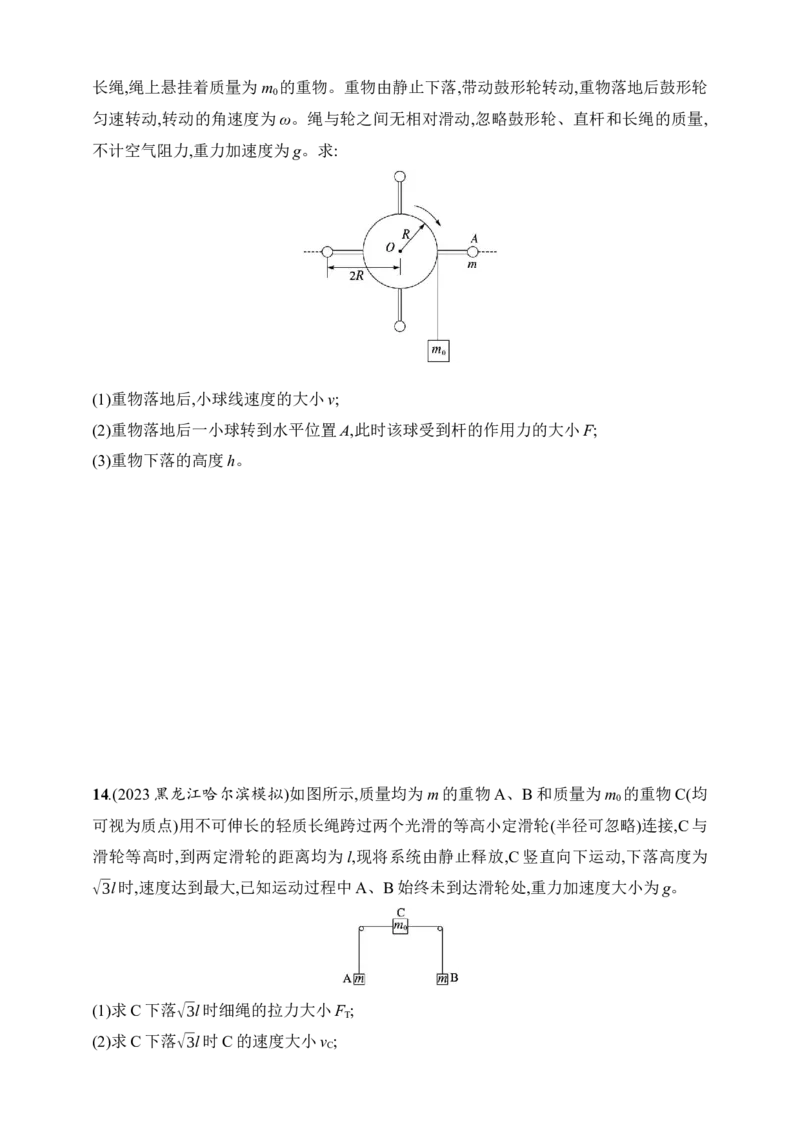
13.如图所示,鼓形轮的半径为R,可绕固定的光滑水平轴O转动,在轮上沿相互垂直的直径
方向固定四根直杆,杆上分别固定有质量为 m的小球,球与O的距离均为2R,在轮上绕有长绳,绳上悬挂着质量为m 的重物。重物由静止下落,带动鼓形轮转动,重物落地后鼓形轮
0
匀速转动,转动的角速度为ω。绳与轮之间无相对滑动,忽略鼓形轮、直杆和长绳的质量,
不计空气阻力,重力加速度为g。求:
(1)重物落地后,小球线速度的大小v;
(2)重物落地后一小球转到水平位置A,此时该球受到杆的作用力的大小F;
(3)重物下落的高度h。
14.(2023黑龙江哈尔滨模拟)如图所示,质量均为m的重物A、B和质量为m 的重物C(均
0
可视为质点)用不可伸长的轻质长绳跨过两个光滑的等高小定滑轮(半径可忽略)连接,C与
滑轮等高时,到两定滑轮的距离均为l,现将系统由静止释放,C竖直向下运动,下落高度为
√3l时,速度达到最大,已知运动过程中A、B始终未到达滑轮处,重力加速度大小为g。
(1)求C下落√3l时细绳的拉力大小F ;
T
(2)求C下落√3l时C的速度大小v ;
C(3)若用质量为√2m的D替换C,将其由静止释放,求D能下降的最大距离d。参考答案
第5讲 专题提升:机械能守恒定律中的连接体问题
1.B 解析 设当物体A距地面h时,其动能与势能相等,对A、B组成的系统,由机械能守
恒定律得 m
A
g(H-h)=1(
m +
1
m
)v2,根据题意可知,1m
A
v2=m
A
gh,联立解得 h=2H,故选项
2 A 2 A 2 5
B正确。
v2
2.D 解析 由题知B运动到最高点时,恰好对杆无作用力,有mg=m ,B在最高点时速度
2L
大小为v=√2gL,因为A、B角速度相同,A的转动半径只有B的一半,所以A的速度大小
v
为 ,当B由最高点转至与O点等高时,取O点所在水平面的重力势能为零,根据A、B机
2
械能守恒有 mg·2L-mgL+1
m
(v) 2
+
1mv2=1
mv 2+
1
mv 2
,2v
A
=v
B
,解得 v
A
=3√10gL,v
B
=
2 2 2 2 A 2 B 10
3√10gL 1 1
,故C错误,D正确;设杆对B做的功为W,对B由动能定理得mg·2L+W= mv 2−
5 2 B 2
6
mv2,解得W=- mgL,所以杆对B做负功,B机械能不守恒,故A、B错误。
5
3.A 解析 a、b整体的机械能守恒,当a的机械能最小时,b的速度最大,此时轻杆对b的
推力为零;当a到达底端时,b的速度为零,所以b的速度先增大后减小,动能先增大后减小,
则b的机械能先增大后减小,所以滑块a的机械能先减小后增大,故A正确。b的速度先增
大后减小,所以a对b的作用力先是动力后是阻力,b对a的作用力先是阻力后是动力,所以
滑块a的动能一直增大,故B错误。当a的机械能最小时,b的速度最大,此时轻杆对b的推
力为零,轻杆对a的作用力为零,轻杆对a的作用力先减小后增大,故C错误。轻杆对a的
作用力先是阻力后是动力,滑块a的加速度一直增大,故D错误。
4.D 解析 根据关联速度得v cos θ=v ,所以二者的速度大小不相等,A错误;当物块A经
A B
过左侧定滑轮正下方时细线与杆垂直,则根据A项分析可知,物块B的速度为零,所以B会
经历减速过程,减速过程中重力会小于细线拉力,B、C错误;当物块A经过左侧定滑轮正
下方时,物块A的速度最大,根据系统机械能守恒得mg( ℎ ) 1mv2,解得v=1 m/s,D
- =
ℎ
sinθ 2正确。
5.B 解析 以小球、弹簧和地球组成的系统为研究对象,由于只有重力和弹力做功,故系
统的机械能守恒;小球运动过程中受到弹簧弹力做功,则小球的机械能不守恒,故A错误。
下摆过程中小球的重力做正功,重力势能减小;通过最低点后小球上升时重力做负功,重力
势能增大,故B正确。下摆过程中,弹簧的伸长量逐渐增大,小球运动的最低点在O点正下
方左侧,即张力最大位置在O点正下方左侧,故C错误。当小球到达O点的正下方时,小球
的速度方向为左下方,速度方向与重力方向不垂直,则重力的瞬时功率不为零,故D错误。
6.C 解析 Q恰好能保持静止时,设弹簧的伸长量为 x,满足kx=2μmg,若剪断轻绳后,物块
P与弹簧组成的系统机械能守恒,弹簧的最大压缩量也为x,因此P相对于其初始位置的最
4μmg
大位移大小为s=2x= ,故选C。
k
7.D 解析 由于b的质量大于a,由静止释放b,b向下加速运动,在b接触弹簧之前,轻绳中
拉力对b做负功,b的机械能一直减小,动能一直增加,选项A错误;b刚接触轻弹簧时,由于
弹力小于b重力和轻绳拉力的合力,b继续向下加速运动,a继续向上运动,选项B错误;b刚
接触轻弹簧时,轻绳的张力不为零,选项C错误;把跨放在光滑轻质定滑轮上轻绳两端a、b
两物体看作整体,在b接触弹簧之前,a、b和绳子组成的系统机械能守恒,b接触弹簧后,弹
簧的弹力对系统做负功,系统机械能减小,选项D正确。
8.A 解析 小球和轻弹簧组成的系统机械能守恒,小球的动能和系统的势能(包括重力势
能和弹性势能)相互转化,小球开始下滑和达到最低点时,小球的动能为零,系统的势能最大,
即 E =E ,当弹簧刚接触到斜面底端挡板时小球速度不为零,动能不为零,所以
p1 p3
E =E >E ,故A正确,B、D错误;在压缩弹簧过程中,刚开始重力沿斜面向下的分力大于
p1 p3 p2
弹簧向上的弹力,后重力沿斜面向下的分力小于弹簧向上的弹力,根据牛顿第二定律,小球
先加速后减速,当加速度为零时,小球速度最大,因此系统势能最小,故C错误。
9.B 解析 由于B沿竖直方向匀加速下降,除重力以外还有绳子拉力做功,所以B机械能
不守恒,故A错误;A对斜面的压力大小为F =mgcos 30°,对于斜面,在水平方向由平衡条
N
√3
件可得,地面对斜面的摩擦力大小为F=F sin 30°= mg,故B正确;A沿斜面匀加速上滑
f N
4
L L 1 1
到斜面中点的过程中,A、B机械能守恒,可得2mg· =mg· sin 30°+ ·2mv 2+ mv 2,又
4 2 2 B 2 A
1 √1 √ 1
v = v ,联立解得v = gL,v = gL,故C错误;设细线上的拉力大小为F,设A的加速度
B 2 A A 3 B 12
大小为 a,由于 B 的加速度为 A的加速度的一半,对A、B 分别由牛顿第二定律可得 F-1 1 5
mgsin 30°=ma,2mg-2F=2m· a,联立解得a= g,F= mg,故D错误。
2 3 6
10.BD 解析 滑块2下滑过程中,绳子拉力增大,合力先减小后反向增大,在B处速度最大,
加速度为零,则加速度先减小后反向增大,A错误,B正确。物块1静止时,弹簧压缩量为d;
当A下滑到C点时,滑块1上升的高度为h= -3d=2d,则当滑块2到达C时
√(3d)2+(4d)2
弹簧伸长的长度为d,此时弹簧的弹性势能等于物块1静止时的弹性势能;对于1、2及弹
簧组成的系统,由机械能守恒定律有m g·2d=m g·4d,解得m ∶m =2∶1,C错误。根据物块
1 2 1 2
1和滑块2沿绳子方向的分速度大小相等,得v cos θ=v ,当滑块2到达C处时,有cos θ=
2 1
4d 4
= ,则物块1和滑块2的速度之比v ∶v =4∶5,D正确。
1 2
5d 5
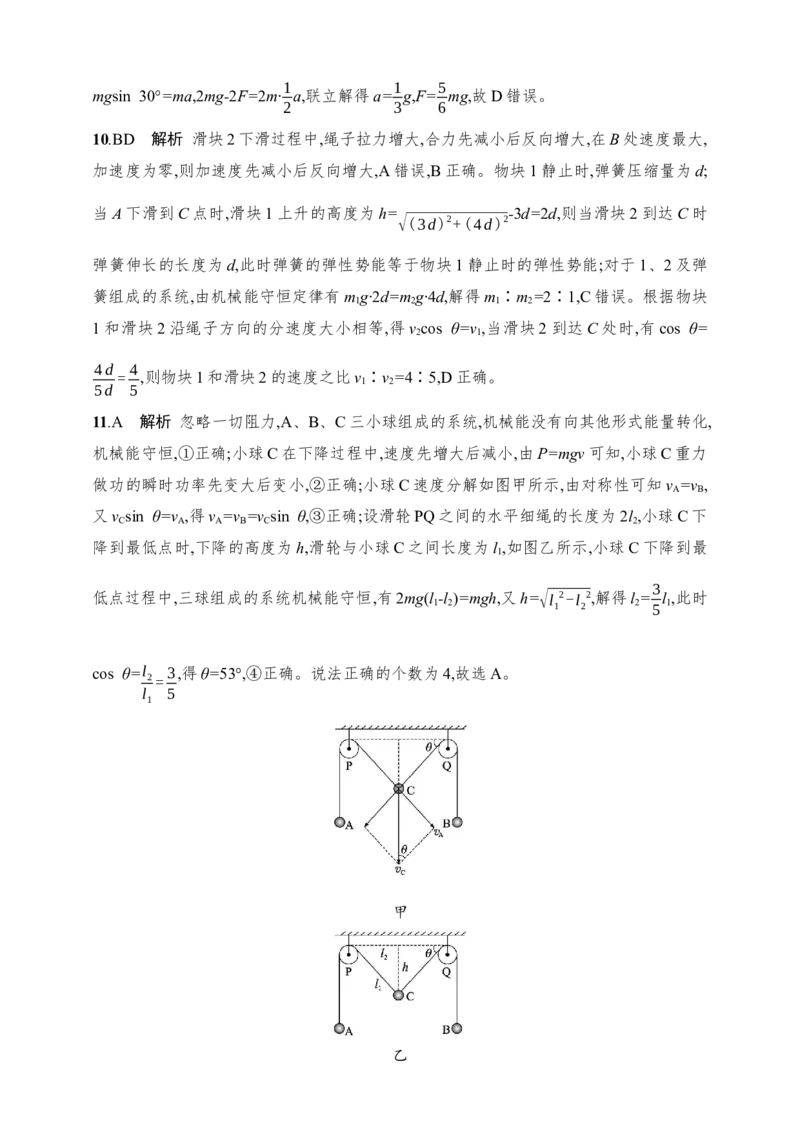
11.A 解析 忽略一切阻力,A、B、C三小球组成的系统,机械能没有向其他形式能量转化,
机械能守恒,①正确;小球C在下降过程中,速度先增大后减小,由P=mgv可知,小球C重力
做功的瞬时功率先变大后变小,②正确;小球C速度分解如图甲所示,由对称性可知v =v ,
A B
又v sin θ=v ,得v =v =v sin θ,③正确;设滑轮PQ之间的水平细绳的长度为 2l ,小球C下
C A A B C 2
降到最低点时,下降的高度为h,滑轮与小球C之间长度为l ,如图乙所示,小球C下降到最
1
3
低点过程中,三球组成的系统机械能守恒,有2mg(l -l )=mgh,又h=√l 2-l 2,解得l = l ,此时
1 2 1 2 2 5 1
cos θ=l 3,得θ=53°,④正确。说法正确的个数为4,故选A。
2=
l 5
1
甲
乙12.ABC 解析 根据题意可知,对小球A、B组成的系统,只有重力和系统内的弹力做功,
系统的机械能守恒,故小球A、B机械能之和保持不变,故A正确;根据题意,设小球A到达
最低点时的速度大小为v ,小球B的速度为v ,取最低点为零势能面,由机械能守恒定律有
A B
1 1
3mgL+2mg·2L=3mg·2L+ ·3mv 2+ ·2mv 2,转动过程中,小球A和小球B的角速度相等,因
2 B 2 A
为v=ωr,则v
A =
2L
=
2,解得v
A
=2√2gL,故B正确;根据题意,小球A到达最低点的过程中,
v L 1 11
B
1
设杆对小球 A 所做的功为 W,对小球 A,由动能定理有 2mg·2L+W= ·2mv 2-0,解得 W=-
2 A
36mgL
,故C正确;根据题意,设OA边与水平方向夹角为 θ时,小球A的速度最大,取O点
11
1
所在平面为零势能面,根据机械能守恒定律有-3mgL=-3mgLcos θ-2mg·2Lsin θ+ ·3m
2
v 2+
1·2m
v 2
,又有v
Am=
2L
=
2,整理可得 v
Am
=√8(4sinθ+3cosθ-3)gL,由数学知识可
Bm 2 Am v L 1 11
Bm
√8[5cos(θ-53°)-3]gL
得v = ,可知,当θ=53°时,小球A的速度达到最大,故D错误。
Am
11
13.答案 (1)2ωR
(2)
√(2mω2R)2+(mg)2
(3)m +16m(ωR)2
0
2m g
0
解析 (1)线速度v=ωr,得v=2ωR。
(2)向心力F =2mω2R
向
设F与水平方向的夹角为α,则
Fcos α=F ,Fsin α=mg
向
解得F= 。
√(2mω2R)2+(mg)2
(3)落地时,重物的速度v'=ωR由机械能守恒得
1 1
m v'2+4× mv2=m gh
0 0
2 2
解得h=m +16m(ωR)2。
0
2m g
0
√3
14.答案 (1) m g
0
3
(2)2√√3m -2m
0 gl
2m +3m
0
(3)2√2l
l √3
解析 (1)设C下落√3l时,细绳与竖直方向的夹角为θ,由几何关系可得tan θ= =
√3l 3
所以θ=30°
对C,其速度最大时,加速度为0,合力为0,有2F cos θ=m g
T 0
√3
解得F = m g。
T 0
3
l
(2)由几何关系,当C下落√3l时,A和B上升的高度为h= -l=l
sinθ
1 1
对A、B、C组成的系统,根据机械能守恒定律有m g(√3l)-2mgh= m v 2+2· mv 2
0 2 0 C 2 A
又v =v cos θ
A C
解得v =2√√3m -2m 。
C 0 gl
2m +3m
0
(3)设D下落至最低点时,细绳与竖直方向的夹角为 α,对A、B、D组成的系统,由机械能
守恒定律有 mgd=2mg( l )
√2 -l
sinα
l
由几何关系得d=
tanα
解得d=2√2l。

