 夜雨聆风
夜雨聆风





【免费下载】竞争性强化学习赋能无人机实现敏捷拦截
2026年3月17日,arXiv网站发表文章《竞争性强化学习赋能无人机实现敏捷拦截》。本文提出了一种利用携带捕网的敏捷无人机拦截目标无人机的解决方案。将拦截任务建模为一个竞争强化学习问题,其中拦截无人机和目标无人机分别由基于近端策略优化训练的独立策略控制。
本文引入了一个高保真仿真环境,该环境集成了逼真的四旋翼飞行器动力学模型和基于JAX实现的底层控制架构,从而支持在GPU上快速并行执行。
本文使用底层控制、集体推力和机身速率来训练智能体,以实现拦截无人机和目标无人机的敏捷飞行,将训练策略的性能(包括捕获率、捕获时间和坠落率)与常用的启发式基线算法进行比较,结果表明,本文的解决方案在拦截敏捷目标方面优于这些基线算法。
最后,在室内飞行场内使用敏捷无人机,在一个规模化的真实场景中验证了训练策略的性能。
本文《竞争性强化学习赋能无人机实现敏捷拦截》英文原文9页,文末附目录。扫码文末二维码,加入蓝军开源情报知识星球会员,免费下载本文原文。需要译文或者报告订制请加微信:19118805880(微信同号)
关键词:竞争强化;敏捷拦截;无人机拦截

这是蓝军开源情报的第 551 期分享
编译 l 所长007
来源 l 蓝军开源情报(ID:Lanjunqingbao)
转载请联系授权(微信号:Lanjunqingbao2081)
利用自主无人机拦截灵活空中目标是机器人技术与安全领域中极具挑战性且日益重要的课题。无人驾驶飞行器(UAV)在未经授权或受限空域的日益普及,不仅带来重大安全风险,更推动了有效拦截策略的研发。特别是在空域保护、基础设施安防及活动安全等场景中,需要具备高精度捕获或击毁未经授权无人机的能力,同时将附带风险降至最低。
配备捕获网的拦截无人机虽具应用前景,但其部署需具备与规避目标机动性相匹配甚至超越的先进控制能力。传统拦截方法通常依赖精确模型、预先规划策略或可预测的目标行为。然而现代四旋翼无人机能执行高度动态机动动作,并主动规避捕获,导致其飞行轨迹难以预测,使得经典方法的有效性大打折扣。
深度强化学习(RL)领域的最新进展表明,无人机可通过与环境直接交互学习复杂高维控制策略。特别是在无人机竞速领域,基于强化学习训练的策略已在高动态性、高机动性飞行任务中实现超人级表现。然而,无人机竞速问题这类任务通常涉及穿越静态或缓慢移动的障碍物,而拦截任务则需要应对主动试图逃避捕获的对抗性智能体。
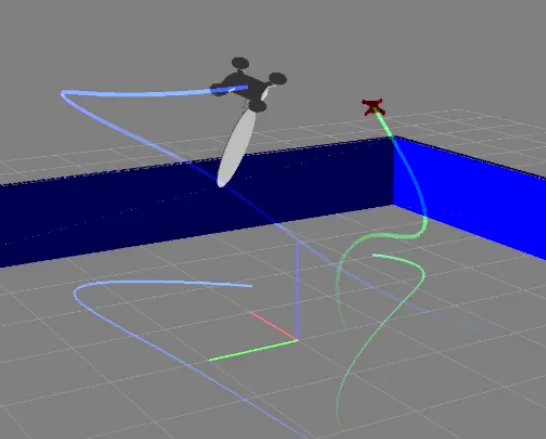
(图1):采用竞争性强化学习方法训练追击无人机与躲避无人机,以完成敏捷拦截任务。两种智能体均能学习低级控制策略,从而在高仿真模拟环境中执行动态机动操作。竞争性多智能体强化学习在对抗性场景(如博弈场景)中已展现出卓越性能。
本研究将敏捷拦截问题建模为竞争性多智能体强化学习任务,其中拦截者(追击者)与目标(逃逸者)均通过近端策略优化在协同进化框架下采用独立策略进行控制。我们的方法整合了高精度四旋翼动力学模型,使双方智能体能够通过低级控制输入学习灵活且符合物理规律的机动动作。通过大量仿真与真实场景实验表明,强化学习训练可生成稳健且自适应的拦截与逃逸策略,其性能优于启发式控制方法。
本文的主要贡献包括:
采用竞争性多智能体强化学习框架实现敏捷无人机拦截,追击者与躲避者均通过低层级控制进行学习。
集成真实四旋翼动力学模型,实现物理真实且灵活的飞行行为。
实证评估表明其在仿真环境中性能优于标准基准模型。
本文结构安排如下:第二节综述拦截技术与敏捷飞行相关研究;第四、三节详细阐述敏捷飞行仿真环境及训练方法;第五节展示实验结果与对比分析;第六、七节总结全文并探讨未来研究方向。
《竞争性强化学习赋能无人机实现敏捷拦截》
【目录】
一、引言
二、 敏捷拦截问题的相关研究
1.敏捷飞行
2.截获
3.我们的方法
三、敏捷飞行仿真环境
四、利用强化学习技术拦截敏捷目标
1.强化学习
2.追逃问题
3.训练细节
五、试验结果
1.训练结果
2.仿真评价
3.模拟中的定性结果
4.现实世界演示
六、结论
七、限制条件
八、参考
添加微信:lanjunqingbao2081
获取报告目录

👇👇
👇👇
原价999元!
星球试运营期间199元!
试运营结束,恢复原价!
👇👇
