 夜雨聆风
夜雨聆风





收藏级长文!汽车人必看的软件开发 V 模型全流程拆解
资深Tier1大牛首次揭秘+完整流程图
📋 目录
-
一、V模型概述与发展背景
-
二、V模型的核心结构与原理
-
三、左侧:系统与软件需求分析
-
四、左侧:系统与软件架构设计
-
五、左侧:详细设计与单元实现
-
六、右侧:单元测试与集成测试
-
七、右侧:系统测试与验收测试
-
八、V模型在AUTOSAR中的应用
-
九、V模型与功能安全(ISO 26262)
-
十、V模型的实践挑战与优化策略
-
十一、总结与展望
一、V模型概述与发展背景
1.1 什么是V模型
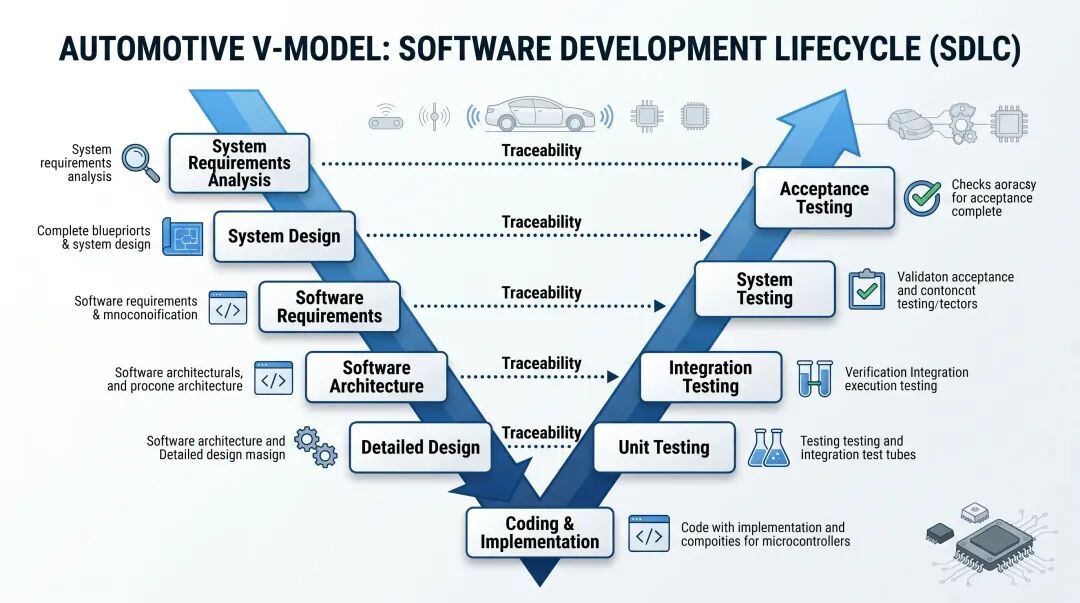
V模型(V-Model)是一种软件开发与测试的系统化方法论,因其整体结构形似英文字母”V”而得名。该模型最早由德国国防军装备、信息技术和现役支持办公室(BWI)在20世纪80年代提出,最初应用于军事和航空航天领域的复杂系统开发。随着汽车电子系统复杂度的急剧提升,V模型逐渐被引入汽车行业,并经过数十年的实践演化,已成为汽车电子软件开发领域最主流、最权威的流程框架之一。
在汽车电子领域,V模型的核心价值在于将开发活动与验证活动一一对应,确保每一个开发阶段都有明确的验证手段和验收标准。这种”左开发、右验证”的对称结构,从根本上解决了传统瀑布模型中”开发完成后再测试”所带来的问题——即缺陷发现过晚、修复成本过高、项目进度失控等典型风险。
1.2 汽车电子为何需要V模型
现代汽车已不再是简单的机械产品,而是集成了上百个电子控制单元(ECU)、数千万行代码、复杂传感器网络和先进算法的智能移动平台。一辆高端车型可能包含:
-
动力系统控制:发动机管理系统(EMS)、变速箱控制单元(TCU)、电机控制器(MCU)
-
底盘与安全系统:电子稳定程序(ESP)、防抱死制动系统(ABS)、电动助力转向(EPS)
-
车身电子:车身控制模块(BCM)、车门控制单元、座椅控制模块
-
信息娱乐:车载信息娱乐系统(IVI)、数字仪表盘、抬头显示(HUD)
-
高级驾驶辅助系统(ADAS):自适应巡航(ACC)、车道保持(LKA)、自动紧急制动(AEB)
这些系统之间高度耦合、实时性要求严苛、安全等级差异巨大(从QM到ASIL D),任何一个环节的疏漏都可能导致严重的功能缺陷甚至安全事故。V模型通过其结构化的分层方法,为这种高度复杂的系统开发提供了可管理、可验证、可追溯的工程框架。
1.3 V模型与相关标准的关系
V模型并非孤立存在,而是与多项国际标准和行业规范深度绑定:
| 标准/规范 | 适用范围 | 与V模型的关系 |
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
特别值得注意的是,ASPICE(Automotive SPICE) 直接以V模型为基础框架,将其过程域映射到V模型的各个阶段,并定义了从Level 0到Level 5的六个能力等级,成为汽车主机厂评估供应商软件开发能力的核心依据。
二、V模型的核心结构与原理
2.1 V模型的整体架构
V模型由左右两条对称的”臂”构成,形似字母”V”:
-
左侧(下行):自顶向下的分解过程,从系统需求逐步细化到软件单元实现
-
右侧(上行):自底向上的集成与验证过程,从单元测试逐步上升到系统验收
-
底部:编码/实现阶段,是开发与验证的分界点
2.2 V模型的层级划分
在汽车电子软件开发中,V模型通常划分为以下层级:
| 层级 | 左侧(开发) | 右侧(验证) | 工作产物 |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
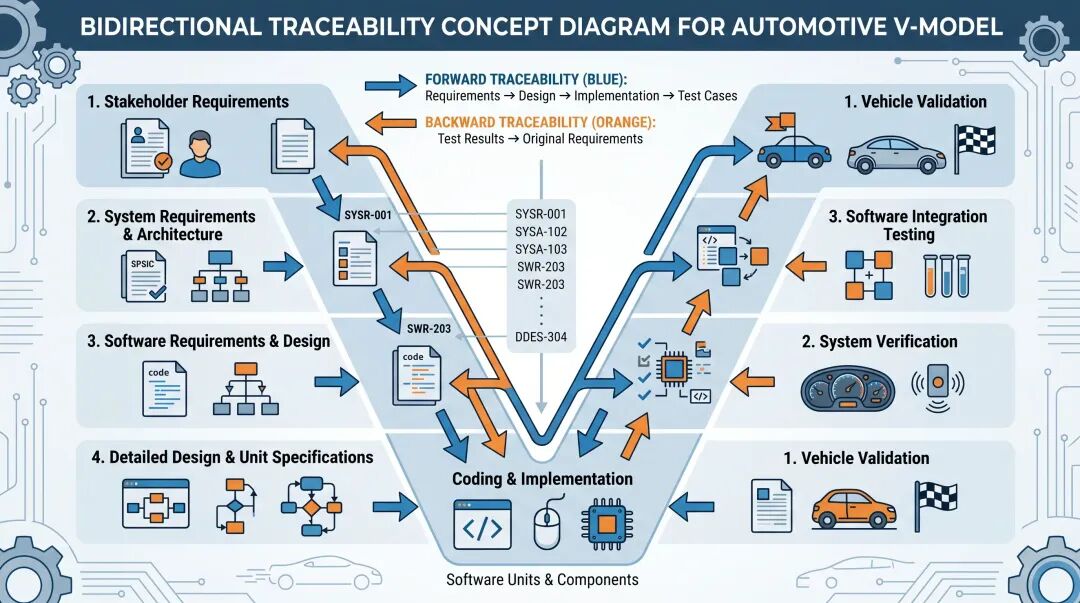
2.3 追溯性的核心机制
V模型的精髓在于双向追溯(Bidirectional Traceability)。每一个需求都必须能够:
-
向前追溯(Forward Traceability):从需求追溯到设计、实现和测试用例,确保需求被正确实现和验证
-
向后追溯(Backward Traceability):从测试用例、代码实现追溯到原始需求,确保没有多余的实现,所有工作都有需求依据
追溯性管理通常通过需求管理工具(如IBM DOORS、Polarion、Jama等)实现,建立从系统需求到软件单元测试的完整链路。在功能安全领域,这种追溯性是ASIL等级认证的硬性要求。
三、左侧:系统与软件需求分析
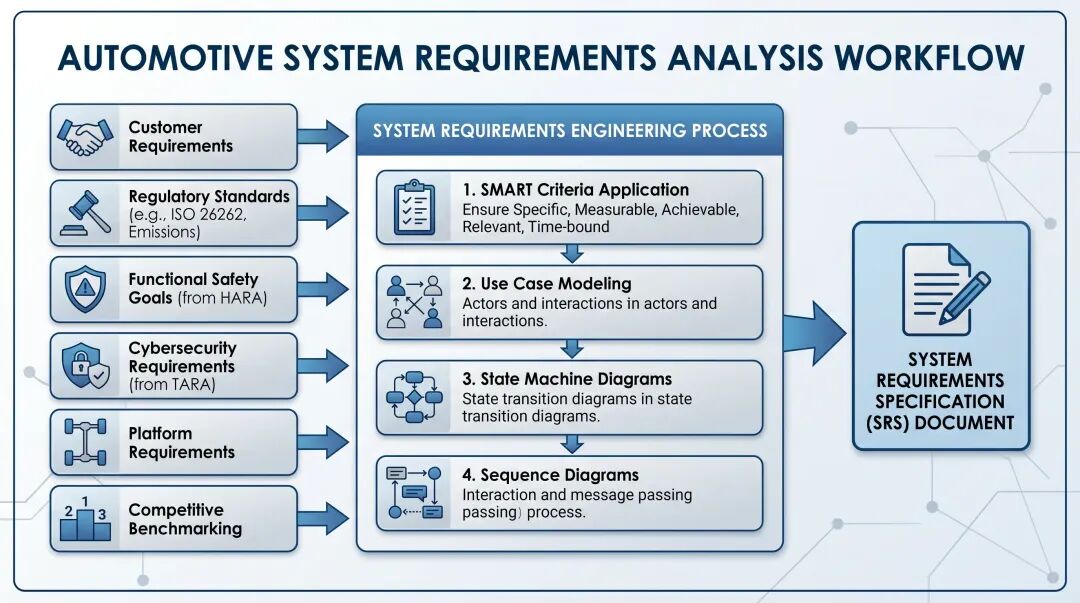
3.1 系统需求分析(System Requirements Analysis)
系统需求分析是V模型的起点,也是整个开发流程的基石。该阶段的主要任务是将用户期望、市场需求、法规要求转化为明确、可验证的系统需求规格。
3.1.1 需求来源与分类
汽车电子系统需求的来源通常包括:
-
客户/主机厂需求:整车功能定义、性能指标、接口规范
-
法规与标准:排放法规(如国六)、安全法规(如E-NCAP)、网络安全法规
-
功能安全需求:基于HARA分析得出的安全目标(Safety Goals)
-
网络安全需求:基于TARA分析得出的网络安全目标
-
平台化需求:跨车型复用的通用功能要求
-
竞品对标:竞争对手产品的功能与性能基准
需求通常按照以下维度分类:
-
功能需求(Functional Requirements):系统应该做什么,如”当车速超过120km/h时,系统应发出超速报警”
-
非功能需求(Non-functional Requirements):系统应该如何表现,包括性能、可靠性、安全性、可维护性等
-
接口需求(Interface Requirements):系统与外部环境(其他ECU、传感器、执行器、总线)的交互规范
3.1.2 需求工程方法
专业的需求工程遵循以下原则和方法:
-
SMART原则:需求必须是具体的(Specific)、可衡量的(Measurable)、可实现的(Achievable)、相关的(Relevant)、有时限的(Time-bound)
-
用例建模(Use Case Modeling):通过参与者、用例、场景描述系统功能
-
状态机建模:描述系统在不同状态间的转换逻辑
-
序列图(Sequence Diagram):描述系统组件间的交互时序
3.2 软件需求分析(Software Requirements Analysis)
软件需求分析是将系统需求中分配给软件实现的部分进一步细化,形成软件需求规格书(Software Requirements Specification, SRS)。
3.2.1 系统需求到软件需求的映射
并非所有系统需求都由软件实现。在需求分配阶段,需要明确:
-
哪些功能由软件实现
-
哪些功能由硬件实现
-
哪些功能由机械结构实现
-
软硬件之间的接口如何定义
这种分配通常在系统设计阶段完成,但软件需求分析阶段需要对其进行确认和细化。
3.2.2 软件需求的特性
高质量的软件需求应具备以下特性:
-
完整性(Completeness):涵盖所有功能场景,包括正常流程和异常流程
-
一致性(Consistency):需求之间没有矛盾
-
无二义性(Unambiguity):每个需求只有一种理解方式
-
可验证性(Verifiability):每个需求都可以通过测试或其他手段验证
-
可追溯性(Traceability):每个软件需求都能追溯到系统需求
3.2.3 需求管理工具
汽车电子行业常用的需求管理工具包括:
-
IBM Engineering Requirements Management DOORS:行业标杆,功能强大,适合大型复杂项目
-
Siemens Polarion:与ALM(应用生命周期管理)深度集成
-
Jama Connect:现代化的需求管理平台,用户体验优秀
-
Codebeamer:Intland出品,在汽车行业应用广泛
四、左侧:系统与软件架构设计
4.1 系统设计(System Design)
系统设计阶段将系统需求转化为技术解决方案,定义系统的整体结构、组件划分和交互关系。
4.1.1 系统架构的核心要素
汽车电子系统设计需要综合考虑以下要素:
-
硬件架构:ECU选型、传感器/执行器布局、电源管理、散热设计
-
软件架构:软件组件划分、分层结构、接口定义
-
通信架构:总线拓扑(CAN/CAN FD、LIN、FlexRay、Ethernet)、网关策略
-
功能分配:功能到ECU的映射、冗余策略、故障降级策略
4.1.2 网络拓扑设计
现代汽车的电子电气架构(E/E Architecture)正在从分布式向域集中、中央计算演进:
-
分布式架构:每个功能有独立的ECU,通过CAN/LIN总线通信,典型于传统车型
-
域集中架构:按功能域整合ECU,如动力域、底盘域、车身域、信息娱乐域,通过域控制器管理
-
中央计算架构:向中央计算平台+区域控制器演进,通过高速以太网骨干网通信
4.2 软件架构设计(Software Architecture Design)
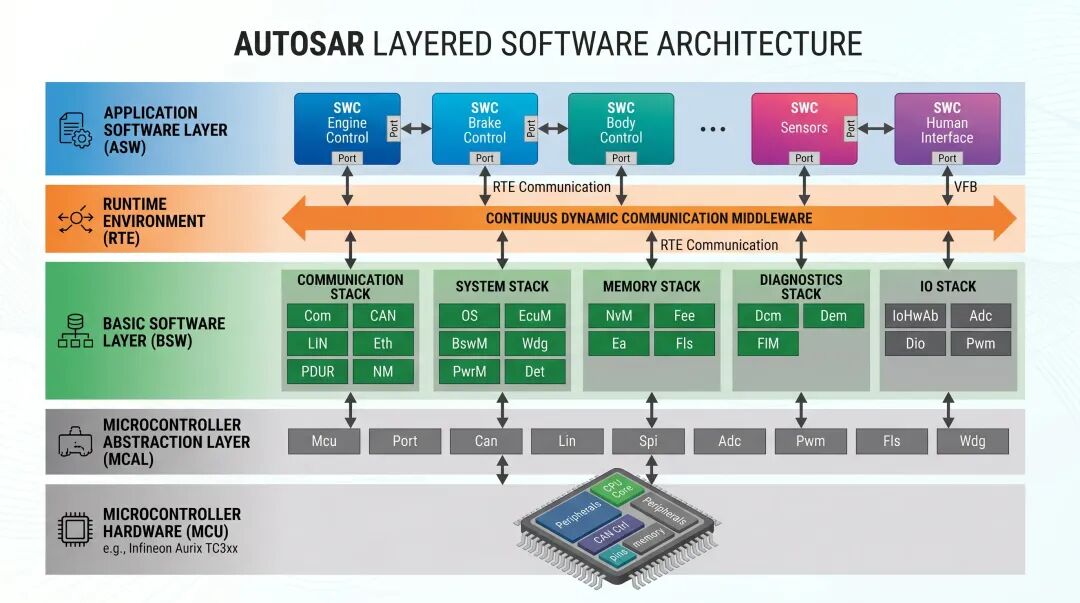
4.2.1 AUTOSAR软件架构
在汽车电子领域,AUTOSAR(AUTomotive Open System ARchitecture)已成为事实上的软件架构标准。AUTOSAR采用分层架构设计:
-
应用层(ASW – Application Software):包含软件组件(SWC),实现应用功能逻辑
-
运行时环境(RTE – Runtime Environment):组件间通信接口,实现组件解耦
-
基础软件(BSW – Basic Software):提供硬件抽象、通信服务、存储服务、诊断服务等标准化功能
-
微控制器驱动(MCAL – Microcontroller Driver):微控制器硬件的直接访问层
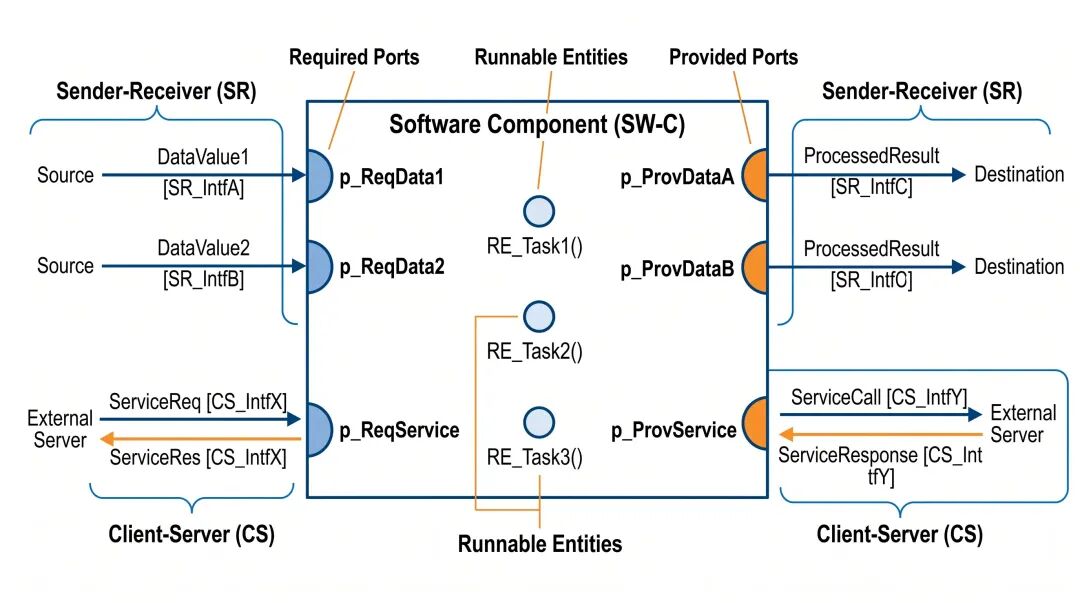
4.2.2 软件组件设计
软件组件(Software Component, SWC)是AUTOSAR应用层的基本构建单元。组件设计包括:
-
端口定义(Ports):Required Port(需求端口)和Provided Port(提供端口)
-
接口定义(Interfaces):Sender-Receiver接口(数据通信)和Client-Server接口(服务调用)
-
运行实体(Runnable Entities):组件内部的可执行函数,由RTE事件触发
-
内部行为(Internal Behavior):运行实体的调度关系、数据访问模式
4.2.3 架构设计工具
汽车电子软件架构设计通常使用专业工具:
-
Vector DaVinci Developer:AUTOSAR应用层设计和配置的行业标准工具
-
EB tresos Studio:Elektrobit出品,BSW配置和代码生成
-
ETAS ISOLAR-A/B:博世旗下,覆盖AUTOSAR全栈配置
-
MathWorks Simulink:基于模型的设计(MBD),用于算法和控制策略建模
五、左侧:详细设计与单元实现
5.1 软件详细设计(Software Detailed Design)
详细设计阶段将软件架构中的组件进一步细化到可编码实现的程度。对于基于模型的开发(MBD),详细设计表现为Simulink模型;对于手写代码开发,详细设计表现为模块/函数级别的设计文档。
5.1.1 基于模型的详细设计
基于模型的设计(Model-Based Design, MBD)已成为汽车电子软件开发的主流方法,尤其在控制算法领域:
-
建模范式:使用Simulink/Stateflow建立可执行模型
-
建模规范:遵循MAAB(MathWorks Automotive Advisory Board)建模规范
-
模型验证:通过仿真验证模型行为符合需求
-
代码生成:使用Embedded Coder自动生成C代码
5.1.2 手写代码的详细设计
对于不适合MBD的部分(如底层驱动、复杂数据结构处理),仍需手写代码。详细设计文档通常包括:
-
模块/函数的功能描述
-
输入参数、输出参数、返回值定义
-
算法逻辑流程(流程图或伪代码)
-
错误处理策略
-
性能要求(执行时间、内存占用)
5.2 软件编码实现(Software Coding)
编码是将设计转化为可执行软件的过程。在汽车电子领域,编码遵循严格的规范和质量要求。
5.2.1 编码规范
汽车电子软件开发必须遵循行业编码规范,最常见的是:
-
MISRA C/C++:汽车领域最广泛使用的C/C++编码规范,定义了数百条规则以确保代码安全性、可移植性和可维护性
-
AUTOSAR C++14:针对C++14的编码规范,适用于Adaptive AUTOSAR开发
-
企业自定义规范:各OEM和Tier 1通常有自己的补充规范
5.2.2 代码质量要求
汽车电子代码质量要求远高于普通软件开发:
-
圈复杂度(Cyclomatic Complexity):通常要求不超过10,确保代码可测试性
-
代码覆盖率:语句覆盖、分支覆盖、MC/DC覆盖(对于ASIL D要求)
-
静态分析:使用Polyspace、QAC、Coverity等工具进行缺陷检测
-
动态分析:运行时错误检测、内存泄漏检测
5.2.3 版本管理与配置管理
代码版本管理使用专业工具:
-
Git:分布式版本控制,配合GitLab/GitHub Enterprise使用
-
IBM ClearCase / Siemens Teamcenter:传统大型项目常用
-
PTC Integrity / Codebeamer:ALM平台集成版本管理
六、右侧:单元测试与集成测试
6.1 软件单元测试(Software Unit Testing)
单元测试是V模型右侧的起点,验证最小可测试单元(通常是函数或模块)的正确性。
6.1.1 单元测试方法
汽车电子单元测试通常采用以下方法:
-
白盒测试(White-box Testing):基于代码内部结构设计测试用例,确保所有语句、分支、条件都被执行
-
黑盒测试(Black-box Testing):基于功能规格设计测试用例,不关心内部实现
-
等价类划分:将输入域划分为等价类,每类选取代表性值测试
-
边界值分析:重点测试边界条件,如最大值、最小值、零值
6.1.2 单元测试工具
-
Vector CAST:汽车行业最常用的单元测试和覆盖率分析工具
-
Parasoft C/C++test:集成静态分析和单元测试
-
Google Test / CppUTest:开源单元测试框架
-
Tessy:Razorcat出品,支持嵌入式C代码测试
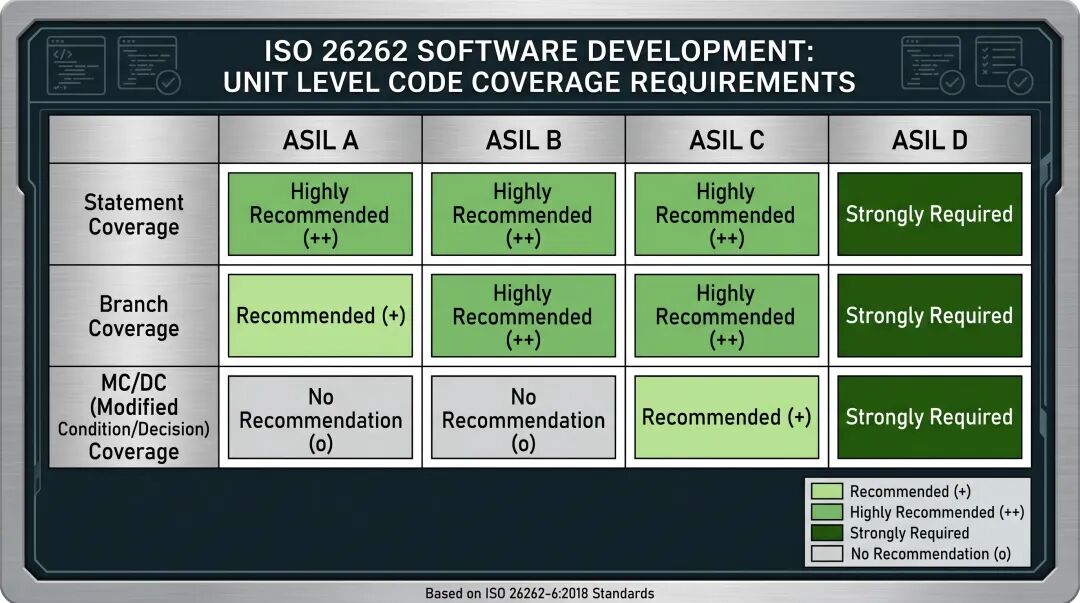
6.1.3 代码覆盖率要求
根据ISO 26262功能安全标准,不同ASIL等级对代码覆盖率有不同要求:
| 覆盖率类型 | ASIL A/B | ASIL C | ASIL D |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6.2 软件集成测试(Software Integration Testing)
集成测试验证多个软件单元组合后的交互正确性,确保组件间接口和数据流符合设计预期。
6.2.1 集成策略
常见的集成策略包括:
-
自底向上(Bottom-up):先集成底层模块,逐步向上集成
-
自顶向下(Top-down):先集成顶层模块,使用桩模块模拟底层
-
三明治/混合(Sandwich):结合自底向上和自顶向下
-
大爆炸(Big Bang):所有模块一次性集成(不推荐,风险高)
6.2.2 集成测试关注点
-
接口测试:参数传递、返回值、数据类型兼容性
-
时序测试:函数调用顺序、执行时序、超时处理
-
数据流测试:数据在组件间的传递和转换正确性
-
资源冲突测试:共享资源访问、竞态条件
-
异常处理测试:错误传播、故障恢复
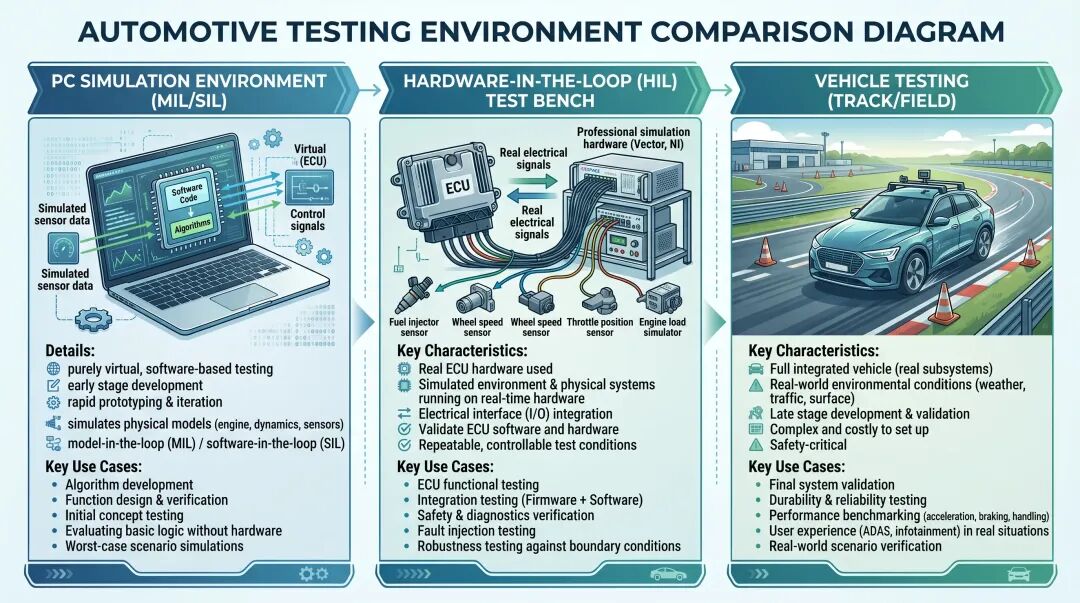
6.2.3 集成测试环境
汽车电子集成测试通常在以下环境中进行:
-
PC仿真环境:使用PC上的仿真器运行软件,便于调试
-
虚拟ECU(V-ECU):使用工具(如Vector vVIRTUALtarget、ETAS ISOLAR-EVE)创建虚拟ECU,在PC上模拟真实ECU行为
-
硬件在环(HIL):将真实ECU连接到HIL仿真器,模拟整车环境
七、右侧:系统测试与验收测试
7.1 软件验收测试(Software Qualification Testing)
软件验收测试验证软件是否满足软件需求规格书中的所有要求,是软件发布前的最后一道质量关卡。
7.1.1 测试内容
-
功能测试:验证所有功能需求是否被正确实现
-
性能测试:CPU负载、内存占用、执行时间是否满足要求
-
鲁棒性测试:异常输入、边界条件、故障注入
-
兼容性测试:不同硬件版本、不同软件配置的兼容性
7.2 系统测试(System Testing)
系统测试在完整的系统环境中进行,验证整个系统(包括硬件、软件、机械部件)是否满足系统需求。
7.2.1 测试类型
-
功能系统测试:端到端功能验证
-
网络通信测试:总线负载、通信时序、网络管理
-
诊断测试:OBD诊断、UDS服务、故障码管理
-
标定测试:参数标定、A2L文件验证
-
刷写测试:软件刷写流程、Bootloader验证
7.2.2 测试环境
-
HIL测试台架:硬件在环仿真,模拟传感器和执行器
-
实车测试:在真实车辆上进行道路测试
-
环境舱测试:高低温、高湿、振动等环境应力测试
7.3 系统验收测试(System Acceptance Testing)
系统验收测试是V模型右侧的最高层级,由客户(主机厂)或独立测试团队执行,确认系统满足所有需求和期望。
7.3.1 验收标准
-
所有系统需求已被验证
-
所有已知缺陷已被记录并接受
-
性能指标满足规格要求
-
文档完整且通过评审
-
安全分析和验证已完成
八、V模型在AUTOSAR中的应用
8.1 AUTOSAR方法论与V模型的映射
AUTOSAR方法论(AUTOSAR Methodology)本质上是V模型在汽车软件架构领域的具体实现。AUTOSAR定义了从系统配置到ECU配置的完整流程:
-
系统配置(System Configuration):定义ECU拓扑、通信矩阵、软件组件到ECU的映射
-
ECU提取(ECU Extract):从系统配置中提取单个ECU相关的配置信息
-
ECU配置(ECU Configuration):配置BSW模块、RTE、OS等
-
代码生成(Code Generation):基于配置生成可编译的C代码
8.2 基于AUTOSAR的V模型实践
在AUTOSAR项目中,V模型的实践具有以下特点:
-
配置驱动开发:大量工作通过工具配置完成,而非手写代码
-
标准化接口:RTE自动生成组件间接口,降低集成风险
-
分层验证:BSW层、RTE层、ASW层分别验证
-
工具链集成:DaVinci、EB tresos、ISOLAR等工具支撑V模型各阶段
8.3 Adaptive AUTOSAR的V模型扩展
随着自动驾驶和智能座舱的发展,Adaptive AUTOSAR应运而生,其V模型实践也有所不同:
-
面向服务的架构(SOA):服务发现、服务注册、动态通信
-
POSIX操作系统:基于Linux/QNX,支持复杂算法和多进程
-
持续更新(OTA):软件生命周期管理、版本回滚策略
-
敏捷开发融合:部分采用敏捷方法,与V模型形成混合模式
九、V模型与功能安全(ISO 26262)
9.1 ISO 26262概述
ISO 26262是道路车辆功能安全的国际标准,定义了从概念阶段到产品退役的全生命周期安全活动。该标准将功能安全活动映射到V模型的各个阶段,确保安全需求被正确实现和验证。
9.2 ASIL等级与V模型
汽车安全完整性等级(ASIL)分为A、B、C、D四个等级,D为最高等级。不同ASIL等级对V模型各阶段的活动深度和严格程度有不同要求:
| V模型阶段 | ASIL A | ASIL B | ASIL C | ASIL D |
|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9.3 安全分析方法
在V模型的左侧,需要进行以下安全分析:
-
危害分析与风险评估(HARA):识别潜在危害,确定ASIL等级
-
失效模式与影响分析(FMEA):系统性分析组件失效模式及其影响
-
故障树分析(FTA):从顶层故障事件向下追溯根本原因
-
依赖失效分析(DFA):分析共因失效和级联失效
在V模型的右侧,需要进行安全验证:
-
安全机制验证:验证安全机制的有效性
-
故障注入测试:人为注入故障,验证系统响应
-
安全分析验证:验证安全分析结论的正确性
十、V模型的实践挑战与优化策略
10.1 常见挑战
10.1.1 需求变更管理
汽车项目周期长(通常2-4年),期间需求频繁变更。V模型的严格层级结构使得变更影响范围大、成本高。
应对策略:
-
建立严格的变更控制流程(Change Control Board)
-
使用影响分析工具评估变更范围
-
采用模块化设计降低变更耦合度
-
预留设计余量应对预期变更
10.1.2 测试效率与覆盖率
随着软件复杂度增加,测试用例数量呈指数级增长,测试执行时间成为瓶颈。
应对策略:
-
基于风险的测试优先级排序
-
测试自动化(Test Automation)
-
基于模型的测试用例生成
-
持续测试(Continuous Testing)融入CI/CD
10.1.3 工具链集成
V模型涉及大量工具,工具间的数据交换和流程衔接往往存在断点。
应对策略:
-
采用ALM(Application Lifecycle Management)平台统一管理
-
标准化数据交换格式(如ARXML、ReqIF)
-
开发自定义集成脚本和插件
-
选择兼容性好的工具组合
10.2 V模型的演进趋势
10.2.1 敏捷与V模型的融合
传统V模型偏重量级,难以适应快速迭代的需求。当前趋势是将敏捷方法(如Scrum)与V模型结合:
-
在V模型的大框架内,采用短周期迭代(Sprint)
-
每个迭代完成一个小的V模型循环
-
持续集成、持续测试、持续交付
10.2.2 持续集成/持续交付(CI/CD)
CI/CD正在改变V模型的右侧实践:
-
代码提交即触发自动构建和测试
-
自动化回归测试确保修改不引入新缺陷
-
自动化部署到测试环境
-
测试报告自动生成和分发
10.2.3 虚拟化与仿真技术
虚拟化技术使得V模型的验证活动可以更早、更频繁地进行:
-
虚拟ECU(V-ECU)支持软件在环(SIL)测试
-
云端仿真平台支持大规模并行测试
-
数字孪生(Digital Twin)实现虚实融合验证
十一、总结与展望
V模型作为汽车电子软件开发的基石方法论,经过数十年的实践检验,已证明其在复杂系统开发中的有效性。其”左开发、右验证”的对称结构,从根本上确保了软件开发的质量和可追溯性。
然而,随着汽车行业的深刻变革,V模型也在不断演进:
-
软件定义汽车(SDV):软件成为汽车的核心竞争力,V模型需要支持更快的迭代速度
-
自动驾驶:AI算法的引入对传统的V模型提出了挑战,需要融合数据驱动开发方法
-
OTA升级:软件全生命周期管理要求V模型向后延伸到运营维护阶段
-
网络安全:ISO 21434的引入要求V模型中增加网络安全工程活动
展望未来,V模型不会消失,而是会与敏捷方法、DevOps、AI辅助开发等新技术深度融合,形成更加灵活、高效、智能的汽车软件开发流程体系。对于汽车电子工程师而言,深入理解V模型的原理和实践,是掌握汽车软件开发核心能力的基础。
