 夜雨聆风
夜雨聆风





无代码!嵌入式AI的“Word”时代来了——TI Model Composer彻底干掉Python

欢迎留言讨论,欢迎扫描群助理微信二维码(Hk014631)备注电子工程师陪跑赢,加入文末:消费电子工程师陪跑赢交流群共同交流。
在过去,嵌入式工程师想在MCU上跑一个视觉检测模型,往往要经历Python环境配置、TensorFlow/PyTorch学习、模型转换、内存优化……一个跨领域的技术栈,足以让多数硬件工程师望而却步。
然而,德州仪器(TI)在Edge AI Studio中推出的Model Composer,正试图改写这一叙事。它是一款无代码(No-Code)、全流程的图形化AI开发工具,覆盖了从数据采集、模型训练到在本地开发板上部署的每一个环节。配合TI Model Zoo中超过60个预优化模型,工程师即使没有AI背景,也能在数小时内完成一个完整的端侧AI应用开发。
本文将以视觉目标检测为例,系统讲解Model Composer的架构、五步法开发流程与实战技巧,帮助嵌入式工程师快速掌握这一利器。
一、Model Composer的核心价值
Model Composer运行在TI开发者门户(dev.ti.com)的云端,也可下载桌面版用于实时控制类任务。其核心定位包括:
1. 全流程无代码集成
用户无需编写任何Python或C++代码,所有操作均在浏览器图形界面中完成。界面顶部按模型开发的正常步骤设计了标签页导航,即使没有AI经验的开发人员也可以直接上手。
2. 支持自带数据(BYOD)
开发者可以使用自己的数据集,对TI Model Zoo中的预训练模型进行再训练(微调),以适应特定场景,实现更高的精度。这是Model Composer区别于许多玩具级工具的核心所在。
3. 云端+桌面双重方案
云端模式:主要面向视觉任务(图像分类、目标检测、语义分割),数据存储在云端,适合快速原型验证和团队协作。
桌面模式:为实时控制任务(电弧故障检测、电机轴承故障检测等)提供本地开发选项,适合需要频繁数据交互且对延迟敏感的工业场景。
4. 与Model Analyzer的协同
Model Composer与同属于Edge AI Studio的Model Analyzer形成互补:后者用于远程评估模型在目标芯片上的性能指标(帧率、延迟、DDR带宽等),帮助开发者选型;前者则负责完整的模型开发与部署。
二、Model Composer的“五步法”开发框架
Model Composer将边缘AI应用开发解构为五步,每个环节均对应一个界面标签页。
数据采集与标注 → 模型选择 → 模型训练 → 实时预览与评估 → 编译与部署
“`

下面我们结合一个实际的电机轴承故障检测(时间序列分类)与视觉目标检测两个案例来说明。
第一步:数据采集与标注(Capture & Annotate)
这是项目的起点。开发者在此收集和标记原始数据。
· 数据导入:可通过连接目标开发板实时采集图像或传感器数据,也可导入已标注好的数据集(支持COCO格式、压缩包等)。
· 数据可视化:工具提供了时频域波形、图像缩略图等可视化面板,方便检查数据质量。
· 数据标注:对于图像分类,只需为每张图片选择类别标签;对于目标检测,则需要在图像上绘制边界框(Bounding Box) 并指定类别;对于语义分割,则进行像素级标记。
· 适配优度(GOF)评估:Model Composer内置了GOF评估工具,可检查数据集是否足以代表真实工况,避免训练出过于理想化的模型。
· 数据集自动切分:上传数据集后,系统会自动按训练集:验证集:测试集=50%:30%:20% 的比例划分。用户也可手动调整。
💡 实战提示:对于视觉检测任务,建议每个类别至少准备200~500张标注图片,且背景多样性越高,模型泛化能力越强。
第二步:模型选择(Model Selection)
从TI Model Zoo中挑选一个适合任务和硬件的预训练模型作为起点。TI Model Zoo包含了大量在ImageNet等公开数据集上预训练、并针对TI边缘AI处理器特别优化的模型。
· 选择目标器件:在界面下拉菜单中指定最终运行的芯片(如AM62A视觉SoC,或F28P55实时控制MCU)。
· 筛选任务类型:图像分类、目标检测、语义分割、时间序列分类等。
· 查看模型指标:Model Composer集成了Model Analyzer的部分能力,可显示每个模型在目标器件上的预期帧率(FPS)、延迟(ms)、mAP(平均精度) 等。对于目标检测,轻量模型如yolox_nano_lite在AM62A上可达30+FPS,适合实时场景;高精度模型如yolov5s则可能降至15FPS,但检测更准。
第三步:模型训练(Train)
选定模型和数据集后开始训练。在此页面配置关键参数:
· Epochs(训练轮数):模型完整遍历数据集的次数。通常20~50轮即可收敛,平台目前上限为100。
· Batch Size:每次模型更新使用的图片数量。由云端或本地GPU显存限制,一般设为8、16或32。
· Learning Rate(学习率):控制模型学习速度。默认值通常适用,若训练震荡可降低。
· Optimizer:常用Adam或SGD。Adam收敛快,SGD泛化能力稍强。
· INT8量化:若目标芯片带有NPU加速器(如TI的TinyEngine或C7x/MMA),建议开启。可将模型大小压缩至1/4,推理速度提升2~4倍,精度损失通常在1%以内。
· 预处理与特征提取:对于时间序列分类,Model Composer支持短时傅里叶变换(STFT) 等特征提取,将原始振动信号转换为频谱图供神经网络学习。
点击“Start Training”后,界面会实时展示训练集和验证集的损失值、准确率/mAP曲线。可根据曲线趋势判断欠拟合(验证集损失一直不降)或过拟合(验证集损失上升,训练集损失下降),及时停止并调整参数。
第四步:实时预览与评估(Live Preview & Evaluate)
训练完成后,不能仅看训练指标,还需要用未见过的数据测试模型泛化能力。
· Testing集评估:在“Testing”页面,使用预留的20%测试集计算最终精度。如果测试集结果与验证集差异超过5%,说明过拟合,需增加数据量或降低模型复杂度。
· Live Preview(需连接硬件):如果有实际开发板通过USB连接,可直接在浏览器中看到摄像头捕获的实时图像,并在图像上叠加检测框和置信度。这是验证模型在实际光照、角度下表现的最直接方式。
第五步:编译与部署(Compile & Deploy)
这是将训练好的模型变为可在嵌入式设备上运行的实体的最后一步。
· 自动编译:Model Composer将模型和训练好的权重编译为目标芯片所需的格式(如.bin或.onnx),并打包所有必要文件。
· 生成CCS工程:系统导出一个完整的Code Composer Studio (CCS) 工程包,包含model/文件夹、src/主程序、makefile和config.yaml配置文件。
· 烧录:在本地打开CCS,导入该工程,编译后通过JTAG或UART烧录到开发板。之后开发板即可独立运行AI推理,无需连接云端。
⚠️ 版本兼容性:Model Composer目前仅支持SDK版本9.0和9.1。导出时请确认与硬件SDK版本匹配。
三、实战:视觉目标检测模型开发全过程
以在AM62A开发板上实现人员检测为例,串联上述步骤。
1. 创建项目
· 登录 dev.ti.com → Edge AI Studio → Model Composer → Create Project。
· 项目名称:person_detection_am62a。
· 任务类型:Object Detection。
· 目标器件:AM62A。
2. 准备数据
· 使用COCO格式的公开数据集(已含person类别),或自行采集。每张图像需对应一个同名的.json标注文件(或统一的COCO JSON)。
· 在“Capture”页面选择“Import Annotated Archive”,上传压缩包。
· 查看标注是否被正确解析:在“Annotation”标签页中,可浏览每张图像的边界框。确认无误后,系统自动划分训练/验证/测试集。
3. 选择模型
· 进入“Model Selection”,从预置模型列表中选yolox_nano_lite_512x512(输入分辨率512×512,适合边缘设备)。
· 右侧面板显示该模型在AM62A上的预期性能:约45 FPS,mAP@0.5约0.65。如果对精度要求更高,可换成yolov5s_640x640,但帧率会降到15 FPS。
4. 训练
· 设置Epochs=50,Batch Size=16,Learning Rate=0.001,Optimizer=Adam。
· 开启INT8 Quantization(AM62A支持)。
· 点击训练。约1小时后(取决于数据量和云端GPU),训练完成。
· 观察曲线:验证集的mAP从0.2逐步上升至0.68,损失值稳定下降。无过拟合迹象。
5. 评估与预览
· 进入“Testing”页面,运行测试集,得到最终mAP@0.5=0.67,召回率=0.71。与验证集接近,可以接受。
· 连接一块AM62A开发板(已烧写SDK 9.1),在“Live Preview”中打开摄像头,对准测试环境。模型实时输出检测框,准确识别人员。可以通过调整置信度阈值来减少误报。
6. 导出与部署
· 点击“Export”,下载生成的person_detection_ccs_project.zip。
· 解压后在CCS中打开工程,点击“Build” → “Debug”烧录到AM62A板载Flash。
· 断开调试器,上电重启,板子独立运行:摄像头采集、AI推理、结果通过HDMI或串口输出。
整个过程中,工程师仅需操作鼠标和浏览器,未编写一行训练或部署代码。
四、BYOD:用自己的数据微调模型
Model Composer最强大的功能是自带数据(BYOD)——允许开发者用自有数据集微调TI预训练模型。步骤如下:
1. 准备数据集:按COCO格式或TI要求的目录结构组织图片和标注文件。
2. 压缩上传:在“Capture”页面选择“Import Annotated Archive”,上传.tar或.zip文件。
3. 检查标注:在“Annotation”页面浏览每一张图,确认边界框正确。
4. 微调:选择与任务匹配的基础模型,保持除全连接层外的权重不变,或开启“Fine-tune”模式(在少量新数据上快速调整)。Model Composer支持这两种策略。
5. 导出:得到针对特定场景(如工厂流水线零件检测)的专用模型。
BYOD的价值在于:开发者无需从头训练,只需几十到几百张特定场景的标注图片,即可获得高精度模型,极大降低了数据门槛。
五、Model Composer的局限与应对
任何工具都有边界,Model Composer也不例外。理解这些局限有助于合理规划项目。
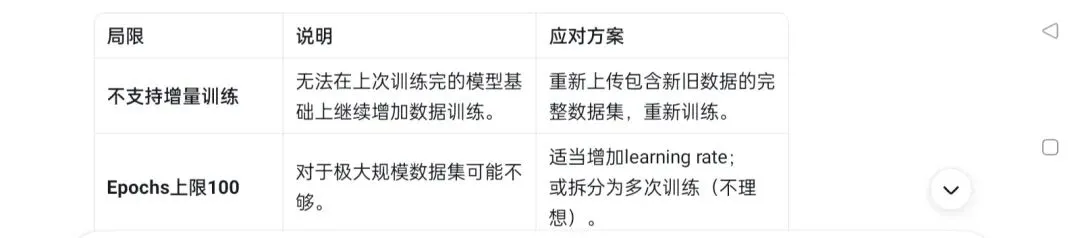


即就是不支持增量训练 无法在上次训练完的模型基础上继续增加数据训练。 重新上传包含新旧数据的完整数据集,重新训练。
Epochs上限100 对于极大规模数据集可能不够。 适当增加learning rate;或拆分为多次训练(不理想)。
仅支持SDK 9.0/9.1 较老或更新的SDK版本暂时不兼容。 导出CCS工程后可手动修改配置文件适配其他SDK(需一定经验)。
实时预览需硬件 若没有本地开发板,无法进行Live Preview。 依赖测试集评估即可,Live Preview并非必需。
云端数据隐私 敏感数据上传公有云可能有合规风险。 工业私有化场景建议使用桌面版Model Composer(针对实时控制任务)或本地部署方案。
六、总结:嵌入式AI民主化的里程碑
Model Composer的意义并非简单的“低代码工具”,而是从根本上改变了嵌入式AI应用的开发范式。它将AI模型开发从“专家领域”下放到“普通嵌入式工程师可触及的范围”。通过无代码界面、预优化模型库、一键编译部署,TI正在兑现其“让每个MCU都能跑AI”的承诺。
对于电子工程师而言,这意味着:
· 学习成本骤降:无需攻克Python、TensorFlow、模型转换等技术栈。
· 开发周期缩短:从数周到数天,甚至数小时。
· 硬件利用率提升:自动量化与NPU加速,释放芯片潜能。
当然,Model Composer并非万能——它更适合主流视觉和时域分类任务,对于极其罕见的网络结构或自定义算子支持有限。但对于绝大多数工业检测、智能家居、消费电子场景,它已足够强大。
未来,随着TinyEngine NPU在更多TI MCU上普及,以及Model Composer对生成式AI的支持(TI已在CCS中引入自然语言辅助编程),我们可以预见:嵌入式工程师的AI能力,将像使用Word写文档一样自然。
如果你正在寻找一条快速嵌入端侧AI能力的路径,不妨从TI Edge AI Studio的Model Composer开始。它可能就是你等待已久的那个“生产力杠杆”。

欢迎留言讨论,欢迎扫描群助理微信二维码(Hk014631)备注电子工程师陪跑赢,加入文末:消费电子工程师陪跑赢交流群共同交流!

开环稳定,闭环却振荡?一文讲清零极点之间的‘继承’与‘重构’
STM32开发革命:HAL库、LL库、CMSIS与CubeMX全解析——效率飙升10倍的秘诀
“树莓派被降维打击?FPGA杀回AI战场:大模型推理能效超GPU 10倍,STM32/ESP32只能靠边站?”
豆包、千问、腾讯元宝、DeepSeek全方位对比:嵌入式工程师该选谁?
别让你的人生,耗在死磕寄存器上:为什么说CubeMX救了一代电工?
嵌入式系统启动与Bootloader:从零地址到操作系统引导
决战有源滤波之巅:Sallen-Key与Multiple-Feedback,谁是你的本命电路?
多级运放设计精要:如何用级联艺术破解电子电路的“不可能三角”?
多级运放设计精要:如何用级联艺术破解电子电路的“不可能三角”?
超越EKF,对标UKF:详解二阶卡尔曼滤波的算法内核与应用边界
卡尔曼滤波中的P、Q、R这三个关键参数,以及它们的迭代计算方法。
线性共振vs非线性自振:别再混淆了!5分钟理清核心差异与工程应用!
为什么你的离散控制系统不稳定?采样器与保持器的关键作用及性能影响全揭秘!
