夜雨聆风
夜雨聆风点击下方卡片,关注【Xbotics具身智能实验室】公众号
更多具身干货,欢迎加入【Xbotics知识星球】(戳我)
👉具身智能学习资料汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-Guide
👉具身智能求职/实习信息汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-AI-Job
你想要的这里都有~~
如果 OpenClaw 已经能在电脑里调用工具、理解任务、执行流程,那它能不能接到真实机器人上?能不能不只操作软件世界,也开始操作物理世界?
围绕这个问题,Xbotics 社区发起了一个新的项目:
Xbotics-robot-openclaw-awesome-work
这个仓库的目标很直接:把“OpenClaw × Robot”方向上已经出现的项目、教程、活动和实践资料,整理成一个统一入口。
我们更想把它做成“第一反应就能想到的入口”

我们真正想做的,其实不是一个普通仓库,而是一个围绕 OpenClaw × Robot 的长期项目专栏。
当以后有人想了解这些问题时:OpenClaw 怎么接机器人?有哪些现成项目值得参考?有哪些社区成员已经做过?有哪些活动和 Workshop?我自己从哪里开始最合适?有没有一个能持续更新的资料入口?
希望大家第一反应会是:先看 Xbotics 的这个仓库。
这就是我们为什么把它定义成教程、项目、活动的统一中心,而不是只做一篇文章,或者只放一个 Demo。
项目地址
在线文档主页:https://mumu-jushen.github.io/Xbotics-robot-openclaw-awesome-work/
GitHub 仓库:Xbotics-robot-openclaw-awesome-work
为什么要做这个仓库?
OpenClaw × Robot 正在成为一个快速升温的方向,但相关信息仍然高度碎片化。
很多开发者已经不满足于“让 Agent 帮我写代码、调环境、跑工具”。他们更想进一步:让 OpenClaw 接管一台真实移动机器人;让大模型通过 ROS2、摄像头、底盘、机械臂与物理世界交互;让“桌面 Agent”变成“具身 Agent”;让这类项目不再只是零散存在,而是能被别人快速找到、理解、复现、扩展。
但现实是,这条路虽然很有吸引力,入门却不容易。
你会很快遇到这些问题:硬件怎么选?OpenClaw 和 ROS2 怎么打通?移动底盘、机械臂、视觉、语音如何协同?目前有哪些项目已经做出来了?哪些方案值得参考?有没有活动、Workshop、课程可以参与?
问题不在于没有项目,而在于项目已经出现,却分散在各处,缺乏系统整理与对比。
所以我们想做的,不是再单独写一篇“我做了一个机器人”的文章,而是先搭一个真正有长期价值的入口:把已有的项目先列出来,把已经发生的活动先整理出来,把后续值得关注的新项目继续补进来。
这个仓库不是只放自家项目

这一点我们想讲清楚。
Xbotics-robot-openclaw-awesome-work 的定位,不是只展示 Xbotics 自己做了什么,而是希望成为一个面向社区的 「OpenClaw × Robot」项目 / 教程 / 活动 / 资料总入口。
它会做两件事:
第一,先把已经存在的代表性项目整理出来。
很多时候,一个方向真正难的不是“完全没有项目”,而是项目已经出现了,但分散在博客、GitHub、帖子、活动页面里,别人根本找不到,也不知道怎么比较和选择。
所以我们会先把已经有代表性的项目系统收录,形成一个清晰的入口。
第二,欢迎社区继续推荐和补充。
如果你看到好的项目、自己做了新的尝试,或者发现了值得收录的活动、教程、插件、案例,都可以加入。这个仓库将以“awesome list”的形式持续演进,而不是静态列表。
它更像是一个导航页、一个项目地图、一个资料索引、一个社区共建入口。
目前已经收录了哪些方向?
在仓库当前的结构里,我们已经开始收录一些具有代表性的项目案例。
1)HomeBot × OpenClaw:家庭服务机器人实验平台
基于宜家小推车、Kiwi 底盘和可选机械臂构建家庭服务机器人平台。通过 HomeBot 管理底盘、机械臂和视觉,再由 OpenClaw / Picoclaw 以自然语言进行控制。
这个方向的价值在于,它展示了一种非常典型的路线:从通用 Maker 平台出发,把 Agent 接到真实家庭服务机器人上。
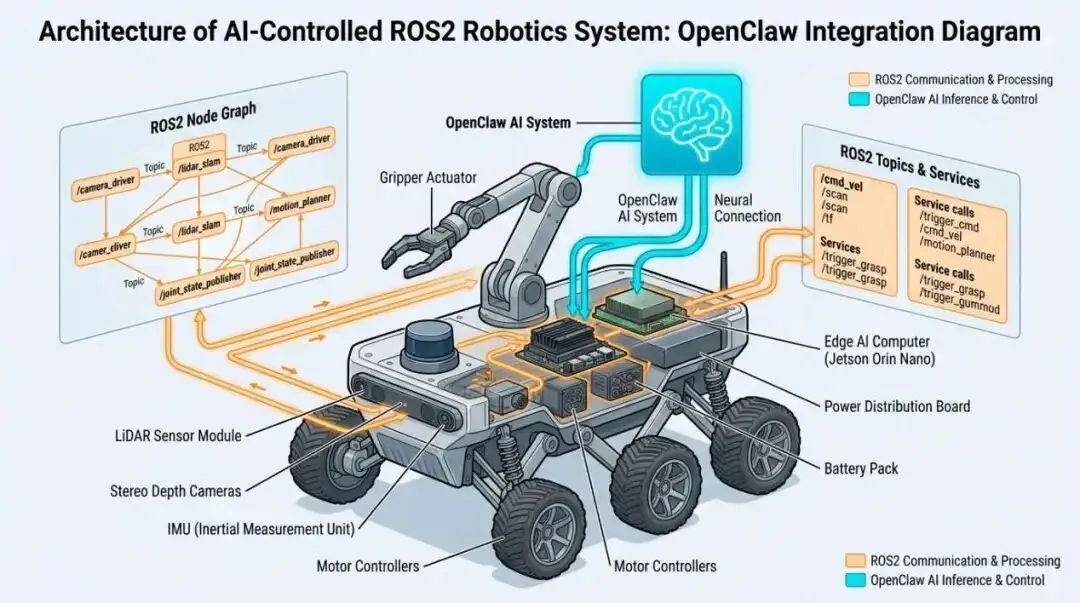
2)OpenClaw 控制 ROS2 Rover(Moe Sani 项目)
使用 Jetson Orin Nano + ROS2 Humble 的小车平台,让 OpenClaw 作为决策层,通过 ROS2 的话题和服务实现目标分解、运动控制与视觉理解。
这个案例很有代表性,因为它说明 OpenClaw 不一定非要“重做一整套机器人系统”,它也可以作为上层智能决策模块,接入已有 ROS2 机器人。
3)RosClaw:ROS2 meets OpenClaw
提供 OpenClaw ↔ ROS2 的通用插件层,支持通过 Telegram、WhatsApp、Discord 等消息应用发送指令,统一控制多种 ROS2 机器人。
这个项目的意义在于,它更强调“通用连接层”的能力,帮助大家思考 OpenClaw 和 ROS2 之间是否能形成更标准的桥接方式。
后面还会补充什么?
除了已收录的项目,我们也会继续完善几类内容。
更多项目案例:移动底盘类、家庭服务机器人类、ROS2 接入类、机械臂/抓取类、语音交互类、视觉感知与任务执行类、OpenClaw/Picoclaw 插件扩展类。
活动与课程资料:目前也在收录与这个方向相关的活动,比如 MakerMods × OpenClaw 具身智能黑客松、A Room for Claw,以及后续 Xbotics 社区围绕这个方向发起的 Workshop、课程和分享活动。
我们希望大家以后不只是“找项目”,也能在这里看到哪些活动在讨论这个方向、哪些 Workshop 值得参加、哪些课程资料能帮助入门、社区正在往哪里推进。
FAQ 与踩坑经验
真正做机器人联调的人都知道,最费时间的常常不是想法,而是环境配置、通信联调、权限问题、插件兼容、ROS2 接口组织、控制链路调试、视觉与动作时延问题。
这些经验如果没人整理,后面的人就只能重复踩坑。所以 FAQ 也会是这个仓库的重要组成部分。
为什么这件事现在值得做?
因为今天的 Agent,已经不再只是“会说”,而是越来越接近“会做”。
一边是大模型和 Agent 系统越来越强:能理解复杂任务、能调用工具、能做多轮规划、能生成代码和调试流程、能理解图像、语音和环境信息。
另一边是机器人系统的门槛在下降:ROS2 越来越成熟,Jetson、摄像头、底盘、机械臂的获取成本越来越低,越来越多开源机器人平台可以复现,社区里已经开始出现一批真实的接入案例。
这意味着 “让 Agent 接入真实机器人”已经不是一个遥远概念,而是一个越来越可以被开发者实际推进的工程方向。
这个阶段最需要的,不只是再多几个零散 Demo,而是需要有人把路线、案例、活动和资料先串起来。
这也是 Xbotics 想做这个仓库的原因。
欢迎大家一起推荐项目、补充案例
这一点我们特别想强调。
这个方向一定不是靠一个团队单独就能做全的。它本身就横跨了很多能力:Agent、软件工程、ROS2、机器人控制、硬件搭建、视觉感知、插件开发、社区活动组织。
所以我们非常欢迎大家一起参与推荐和共建。
你可以做的事情:
推荐值得收录的项目:如果你看到好的 OpenClaw × Robot 项目,欢迎告诉我们。 提交自己的项目实践:如果你自己已经做了相关尝试,也欢迎补充进来。 补充活动和课程资料:如果你组织过 Workshop、课程实践、黑客松、分享会,也欢迎加入仓库整理。 提交 FAQ 和排障经验:很多真正有价值的内容,不是“最终成果”,而是那些别人最容易卡住的地方。
我们希望这个仓库能够慢慢变成一个真正有生命力的社区入口,而不是一份静态名单。
这个仓库适合谁看?
如果你属于下面这些人群,应该都会对这个项目有兴趣:
OpenClaw / 大模型 Agent 用户:你已经在电脑端深度使用 Agent,想继续往实体设备方向走。
机器人开发者 / Maker:你想做一台真正能接入大模型的机器人,而不是只做单一模块测试。
高校课程 / 实验室 / 研究团队:你需要一套可以用于教学、实验和项目拓展的方向入口。
对具身智能 / physical AI 感兴趣的开发者:你在寻找一个比“概念讨论”更具体、更可落地的切入点。
最后想说
今天很多人都在讨论 Agent,也有越来越多人开始讨论机器人。
但真正值得长期投入的机会,往往出现在两者开始接上的地方:当 Agent 不只是会回答问题,而是开始理解设备、调用接口、连接传感器、控制机器人、操作物理世界。
这件事不会自动发生。它需要项目、教程、案例、活动,也需要社区一起把经验沉淀下来。
Xbotics 想先做这件事的“入口整理者”。把已经有的项目先列出来,把值得关注的活动先归起来,把后续好的推荐继续补进来。
如果你也对 OpenClaw × Robot 感兴趣,欢迎关注、收藏、转发,也欢迎把你知道的项目和案例推荐给我们,一起把这份清单越做越完整。
让 OpenClaw 不只停留在电脑里。
也让更多机器人项目,能被更多人真正看见。
-END-
Ask Me Anything|提问箱
❝对文章有疑惑,或想聊更深?欢迎把你的问题丢给我们:技术方案、实操踩坑、课程与资料、项目合作、职业发展,都可以问。
怎么问:在评论区留言,或私信公众号
我们会做什么:每周集中整理高质量问题并公开回复,重点问题邀请作者或嘉宾深度解答;典型问题会加入知识库并持续更新。
提问小提示:尽量说明「你的目标—当前做法—期望产出」,附上必要信息(硬件/软件版本、数据规模等),能更快获得有用答案。
一起把问题变成知识,推动社区进步 🚀