 夜雨聆风
夜雨聆风
伺服电机控制比步进复杂,端子符号也更多——PULSE、SIGN、SON、ARST、CCLR、SPD、TCM、CWL、CCWL……这些字母都代表什么?
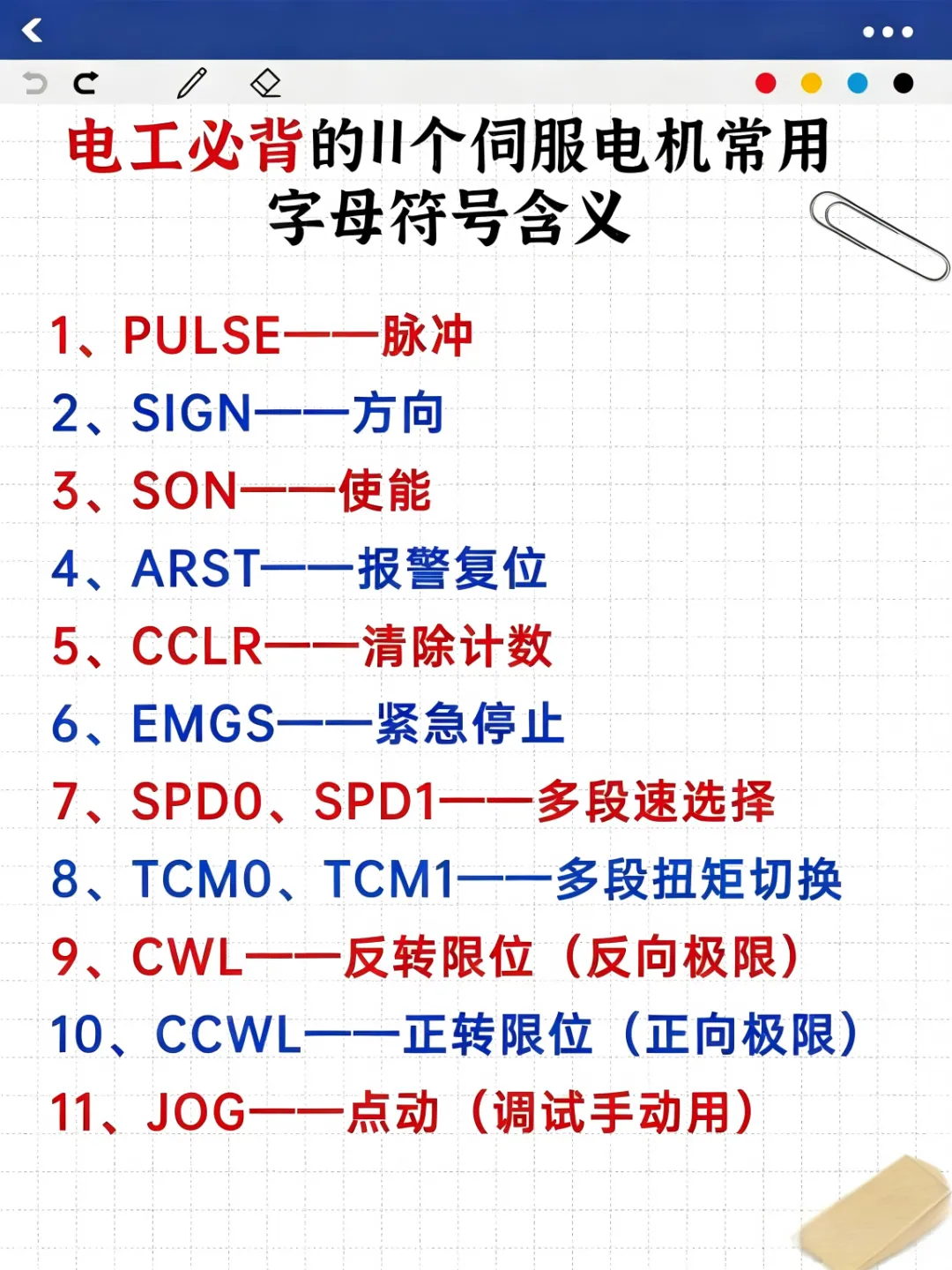
PULSE(脉冲):位置控制模式下,伺服驱动器接收来自PLC或运动控制器的脉冲信号。一个脉冲对应一定的旋转角度,脉冲频率决定转速,脉冲总数决定转动角度。差分信号(PULS+、PULS-)抗干扰能力强,集电极开路方式(PUL+、PUL-)成本低但传输距离短。
SIGN(方向):方向信号,控制伺服电机正转或反转。高电平一种方向,低电平相反方向。与脉冲信号配合,实现精确定位。
ARST(报警复位):伺服驱动器发生故障报警时,ARST信号有效可清除当前报警。复位前必须先排除故障根源(如过载、过流、过压、编码器异常),否则复位无效。
CCLR(清除计数):清除伺服驱动器内部的位置偏差计数器。用于将当前实际位置清零或归零操作。配合原点回归信号实现设备回零。
EMGS(紧急停止):硬件紧急停止信号,优先级最高。EMGS有效时立即切断伺服电机动力,电机自由停车。必须串联在急停回路,独立于软件控制,不能通过PLC输出代替。
SPD0、SPD1(速度指令):通过组合SPD0和SPD1的ON/OFF状态,选择多段预置速度。常见四段速选择(SPD0/SPD1组合00、01、10、11对应四段速度)。多段速参数通过驱动器软件或面板设置。
TCM0、TCM1(扭矩指令):类似速度指令,用于多段扭矩切换。在扭矩控制模式下,选择预置扭矩值。常见于压装、张力控制等应用。
CWL(反转限位):反向超程保护信号。当运动机构到达负方向极限位置时,CWL有效,伺服驱动器禁止继续向反方向运行,只能正向离开。需配合机械限位开关使用。
CCWL(正转限位):正向超程保护信号。当运动机构到达正方向极限位置时,CCWL有效,禁止正向运行。硬件限位信号不能依赖软件,必须接入驱动器。
JOG(点动):点动运行信号,JOG有效时电机以预设速度低速运行,用于调试和手动定位。松开JOG信号电机停止,通常无自锁。
位置模式典型接线(脉冲+方向+使能+限位+急停):PLC脉冲输出接PULSE,方向输出接SIGN。
PLC数字量输出接SON(使能)、ARST(复位)、CCLR(清除计数)。
外部急停按钮接EMGS,正反转限位开关分别接CCWL和CWL。
JOG点动按钮接驱动器JOG输入(或通过PLC控制)。
伺服不转但有保持转矩:SON使能未接通,PULSE脉冲信号未发送,方向SIGN信号缺失。
伺服报警无法复位:先查故障代码确认原因(过载、过流、过压、编码器故障)。排除故障根源后再给ARST信号。
电机只能单向转:方向SIGN信号电平未变化或接线错误。
运行到限位停住但回不来:CWL/CCWL信号被锁死,检查限位开关状态及接线,反方向运行时应能离开限位区。
总结:脉冲给位置,方向定正反,SON给使能,ARST清报警,CCLR清零,EMGS急停,CWL/CCWL限位保护。记住这些符号,伺服接线不懵。
如果你想系统学习电气知识,掌握更多电工实战技巧,欢迎点击阅读原文或在评论区留言!
-END-
华中高级职业技术学校
就读华中高级职业技术学校

 觉得不错,请点个在看!
觉得不错,请点个在看!
↓快戳“阅读原文”,了解课程详情~
