文档内容
2025 年高考甘肃卷物理真题
一、单选题
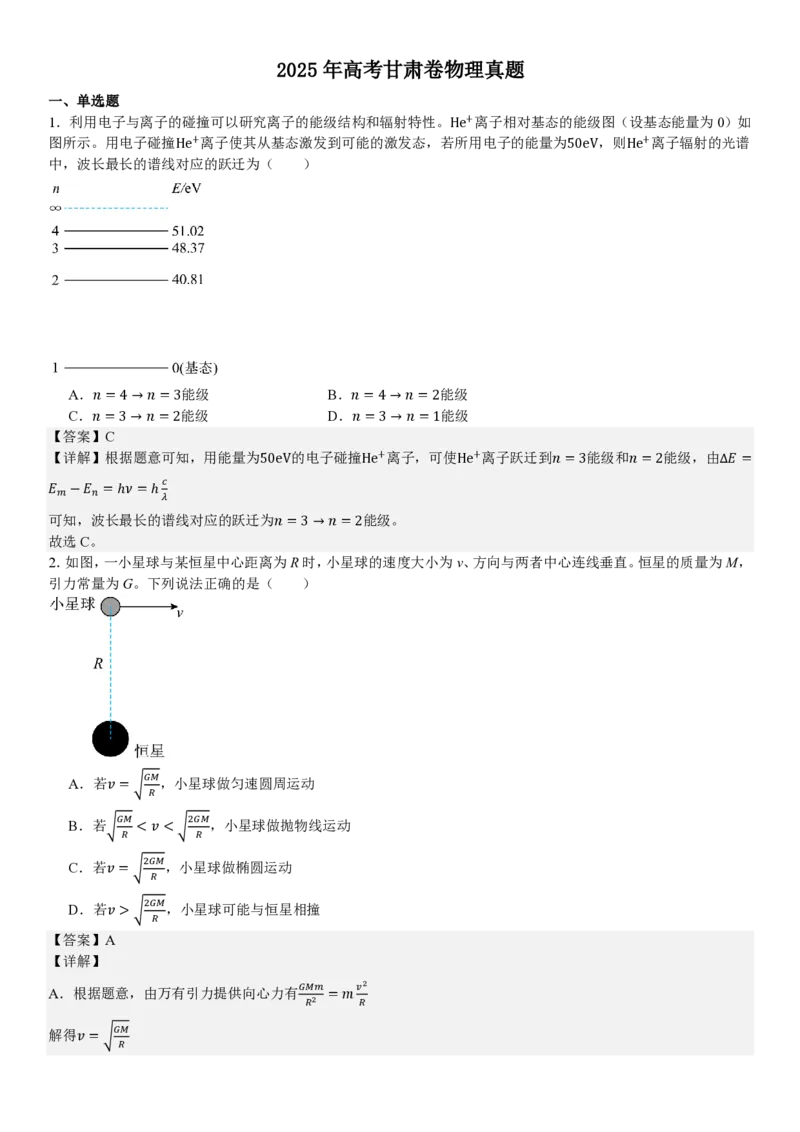
1.利用电子与离子的碰撞可以研究离子的能级结构和辐射特性。He+离子相对基态的能级图(设基态能量为0)如
图所示。用电子碰撞He+离子使其从基态激发到可能的激发态,若所用电子的能量为50eV,则He+离子辐射的光谱
中,波长最长的谱线对应的跃迁为( )
A.𝑛 =4→𝑛 =3能级 B.𝑛 =4→𝑛 =2能级
C.𝑛 =3→𝑛 =2能级 D.𝑛 =3→𝑛 =1能级
【答案】C
【详解】根据题意可知,用能量为50eV的电子碰撞He+离子,可使He+离子跃迁到𝑛 =3能级和𝑛 =2能级,由Δ𝐸 =
𝑐
𝐸 −𝐸 =ℎ𝜈 =ℎ
𝑚 𝑛
𝜆
可知,波长最长的谱线对应的跃迁为𝑛 =3→𝑛 =2能级。
故选C。
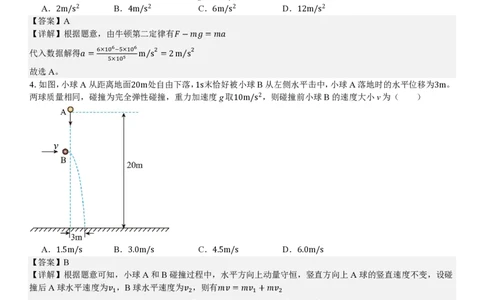
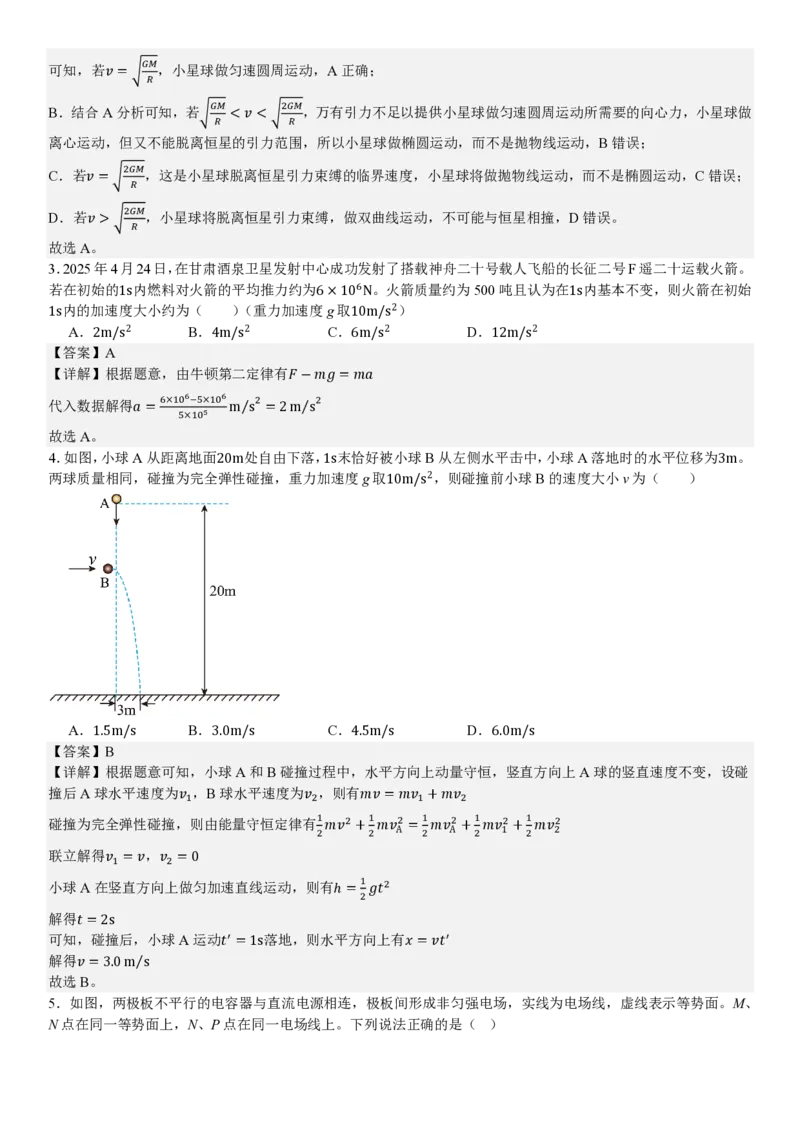
2.如图,一小星球与某恒星中心距离为R时,小星球的速度大小为v、方向与两者中心连线垂直。恒星的质量为M,
引力常量为G。下列说法正确的是( )
A.若𝑣 =√ 𝐺𝑀,小星球做匀速圆周运动
𝑅
B.若√ 𝐺𝑀 <𝑣 <√ 2𝐺𝑀,小星球做抛物线运动
𝑅 𝑅
C.若𝑣 =√ 2𝐺𝑀,小星球做椭圆运动
𝑅
D.若𝑣 >√ 2𝐺𝑀,小星球可能与恒星相撞
𝑅
【答案】A
【详解】
A.根据题意,由万有引力提供向心力有𝐺𝑀𝑚
=𝑚
𝑣2
𝑅2 𝑅
解得𝑣 =√ 𝐺𝑀
𝑅可知,若𝑣 =√ 𝐺𝑀,小星球做匀速圆周运动,A正确;
𝑅
B.结合A分析可知,若√ 𝐺𝑀 <𝑣 <√ 2𝐺𝑀,万有引力不足以提供小星球做匀速圆周运动所需要的向心力,小星球做
𝑅 𝑅
离心运动,但又不能脱离恒星的引力范围,所以小星球做椭圆运动,而不是抛物线运动,B错误;
C.若𝑣 =√ 2𝐺𝑀,这是小星球脱离恒星引力束缚的临界速度,小星球将做抛物线运动,而不是椭圆运动,C错误;
𝑅
D.若𝑣 >√ 2𝐺𝑀,小星球将脱离恒星引力束缚,做双曲线运动,不可能与恒星相撞,D错误。
𝑅
故选A。
3.2025年4月24日,在甘肃酒泉卫星发射中心成功发射了搭载神舟二十号载人飞船的长征二号F遥二十运载火箭。
若在初始的1s内燃料对火箭的平均推力约为6×106N。火箭质量约为500吨且认为在1s内基本不变,则火箭在初始
1s内的加速度大小约为( )(重力加速度g取10m/s2)
A.2m/s2 B.4m/s2 C.6m/s2 D.12m/s2
【答案】A
【详解】根据题意,由牛顿第二定律有𝐹−𝑚𝑔 =𝑚𝑎
代入数据解得𝑎 = 6×106−5×106 m⁄s 2 =2m⁄s 2
5×105
故选A。
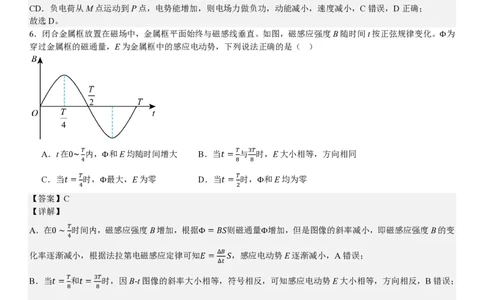
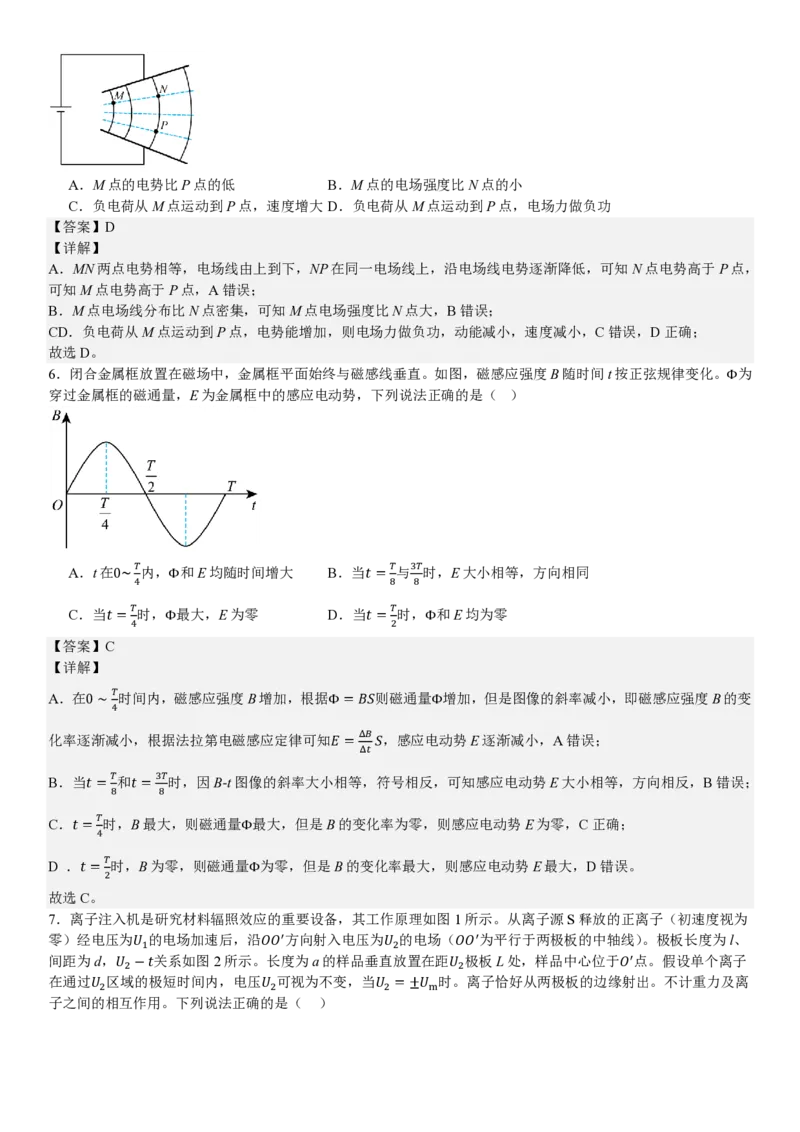
4.如图,小球A从距离地面20m处自由下落,1s末恰好被小球B从左侧水平击中,小球A落地时的水平位移为3m。
两球质量相同,碰撞为完全弹性碰撞,重力加速度g取10m/s2,则碰撞前小球B的速度大小v为( )
A.1.5m/s B.3.0m/s C.4.5m/s D.6.0m/s
【答案】B
【详解】根据题意可知,小球A和B碰撞过程中,水平方向上动量守恒,竖直方向上A球的竖直速度不变,设碰
撞后A球水平速度为𝑣 ,B球水平速度为𝑣 ,则有𝑚𝑣 =𝑚𝑣 +𝑚𝑣
1 2 1 2
碰撞为完全弹性碰撞,则由能量守恒定律有1 𝑚𝑣2+ 1 𝑚𝑣2 = 1 𝑚𝑣2+ 1 𝑚𝑣2+ 1 𝑚𝑣2
2 2 A 2 A 2 1 2 2
联立解得𝑣 =𝑣,𝑣 =0
1 2
小球A在竖直方向上做匀加速直线运动,则有ℎ = 1 𝑔𝑡2
2
解得𝑡 =2s
可知,碰撞后,小球A运动𝑡′ =1s落地,则水平方向上有𝑥 =𝑣𝑡′
解得𝑣 =3.0m⁄s
故选B。
5.如图,两极板不平行的电容器与直流电源相连,极板间形成非匀强电场,实线为电场线,虚线表示等势面。M、
N点在同一等势面上,N、P点在同一电场线上。下列说法正确的是( )A.M点的电势比P点的低 B.M点的电场强度比N点的小
C.负电荷从M点运动到P点,速度增大 D.负电荷从M点运动到P点,电场力做负功
【答案】D
【详解】
A.MN两点电势相等,电场线由上到下,NP在同一电场线上,沿电场线电势逐渐降低,可知N点电势高于P点,
可知M点电势高于P点,A错误;
B.M点电场线分布比N点密集,可知M点电场强度比N点大,B错误;
CD.负电荷从M点运动到P点,电势能增加,则电场力做负功,动能减小,速度减小,C错误,D正确;
故选D。
6.闭合金属框放置在磁场中,金属框平面始终与磁感线垂直。如图,磁感应强度B随时间t按正弦规律变化。Φ为
穿过金属框的磁通量,E为金属框中的感应电动势,下列说法正确的是( )
A.t在0~ 𝑇内,Φ和E均随时间增大 B.当𝑡 = 𝑇与3𝑇时,E大小相等,方向相同
4 8 8
C.当𝑡 = 𝑇时,Φ最大,E为零 D.当𝑡 = 𝑇时,Φ和E均为零
4 2
【答案】C
【详解】
A.在0∼ 𝑇时间内,磁感应强度B增加,根据Φ=𝐵𝑆则磁通量Φ增加,但是图像的斜率减小,即磁感应强度B的变
4
化率逐渐减小,根据法拉第电磁感应定律可知𝐸 = Δ𝐵 𝑆,感应电动势E逐渐减小,A错误;
Δ𝑡
B.当𝑡 = 𝑇和𝑡 = 3𝑇时,因B-t图像的斜率大小相等,符号相反,可知感应电动势E大小相等,方向相反,B错误;
8 8
C.𝑡 = 𝑇时,B最大,则磁通量Φ最大,但是B的变化率为零,则感应电动势E为零,C正确;
4
D .𝑡 = 𝑇时,B为零,则磁通量Φ为零,但是B的变化率最大,则感应电动势E最大,D错误。
2
故选C。
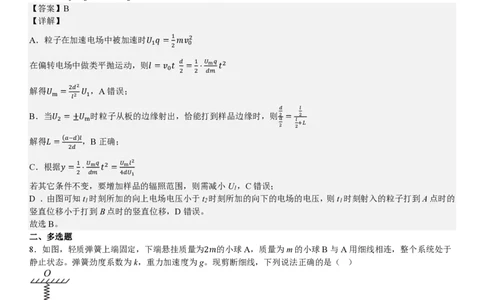
7.离子注入机是研究材料辐照效应的重要设备,其工作原理如图1所示。从离子源S释放的正离子(初速度视为
零)经电压为𝑈 的电场加速后,沿𝑂𝑂′方向射入电压为𝑈 的电场(𝑂𝑂′为平行于两极板的中轴线)。极板长度为l、
1 2
间距为d,𝑈 −𝑡关系如图2所示。长度为a的样品垂直放置在距𝑈 极板L处,样品中心位于𝑂′点。假设单个离子
2 2
在通过𝑈 区域的极短时间内,电压𝑈 可视为不变,当𝑈 =±𝑈 时。离子恰好从两极板的边缘射出。不计重力及离
2 2 2 m
子之间的相互作用。下列说法正确的是( )A.𝑈 的最大值𝑈 =
𝑑2
𝑈
2 m 𝑙2 1
B.当𝑈 =±𝑈 且𝐿 = (𝑎−𝑑)𝑙时,离子恰好能打到样品边缘
2 m
2𝑑
C.若其他条件不变,要增大样品的辐照范围,需增大𝑈
1
D.在𝑡 和𝑡 时刻射入𝑈 的离子,有可能分别打在A和B点
1 2 2
【答案】B
【详解】
A.粒子在加速电场中被加速时𝑈 𝑞 = 1 𝑚𝑣2
1 2 0
在偏转电场中做类平抛运动,则𝑙 =𝑣 𝑡 𝑑 = 1 ⋅ 𝑈m𝑞 𝑡2
0
2 2 𝑑𝑚
解得𝑈 =
2𝑑2
𝑈 ,A错误;
m 𝑙2 1
𝑑 𝑙
B.当𝑈 =±𝑈 时粒子从板的边缘射出,恰能打到样品边缘时,则2 = 2
2 m 𝑎 𝑙
+𝐿
2 2
解得𝐿 =
(𝑎−𝑑)𝑙,B正确;
2𝑑
C.根据𝑦 = 1 ⋅ 𝑈m𝑞 𝑡2 = 𝑈m𝑙2
2 𝑑𝑚 4𝑑𝑈1
若其它条件不变,要增加样品的辐照范围,则需减小U ,C错误;
1
D .由图可知t 时刻所加的向上电场电压小于t 时刻所加的向下的电场的电压,则t 时刻射入的粒子打到A点时的
1 2 1
竖直位移小于打到B点时的竖直位移,D错误。
故选B。
二、多选题
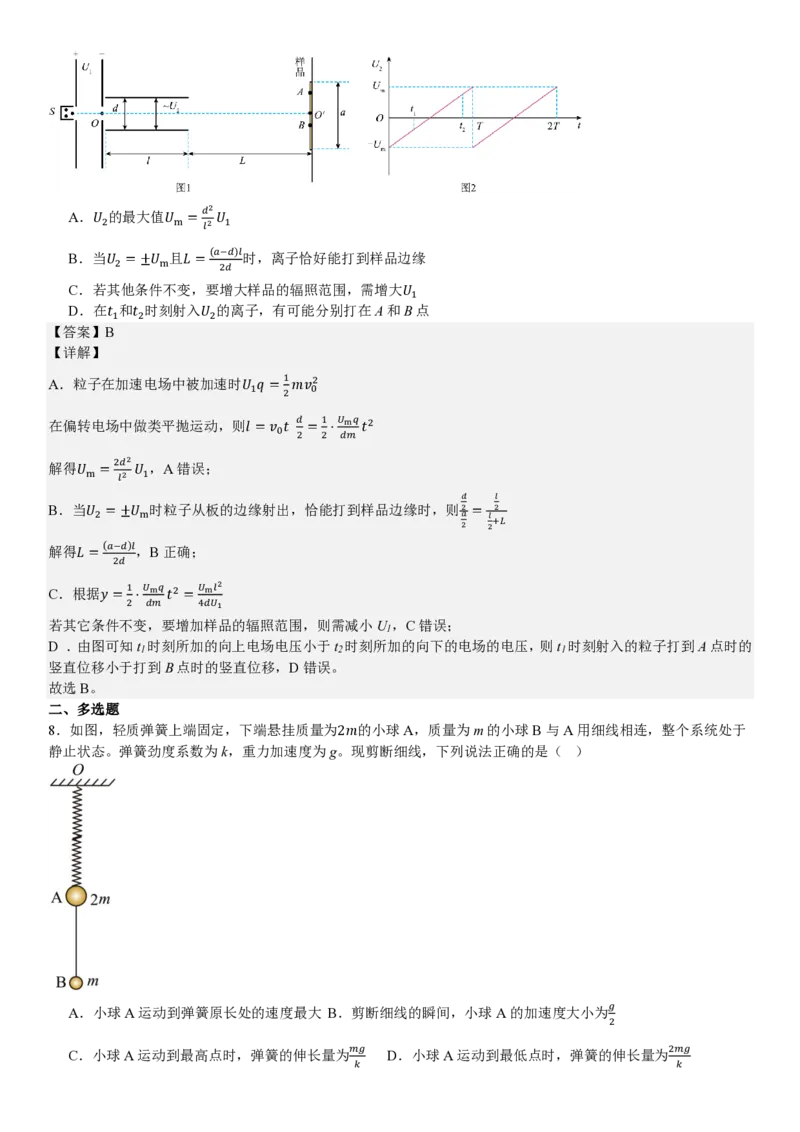
8.如图,轻质弹簧上端固定,下端悬挂质量为2𝑚的小球A,质量为m的小球B与A用细线相连,整个系统处于
静止状态。弹簧劲度系数为k,重力加速度为g。现剪断细线,下列说法正确的是( )
A.小球A运动到弹簧原长处的速度最大 B.剪断细线的瞬间,小球A的加速度大小为𝑔
2
C.小球A运动到最高点时,弹簧的伸长量为𝑚𝑔 D.小球A运动到最低点时,弹簧的伸长量为2𝑚𝑔
𝑘 𝑘【答案】BC
【详解】
A.剪断细线后,弹力大于A的重力,则A先向上做加速运动,随弹力的减小,则向上的加速度减小,当加速度为
零时速度最大,此时弹力等于重力,弹簧处于拉伸状态,A错误;
B.剪断细线之前则𝐹 =3𝑚𝑔
弹
剪断细线瞬间弹簧弹力不变,则对A由牛顿第二定律𝐹 −2𝑚𝑔 =2𝑚𝑎
弹
解得A的加速度𝑎 = 𝑔,B正确;
2
C.剪断细线之前弹簧伸长量𝑥 = 3𝑚𝑔
1
𝑘
剪断细线后A做简谐振动,在平衡位置时弹簧伸长量𝑥 = 2𝑚𝑔
2
𝑘
即振幅为𝐴 =𝑥 −𝑥 = 𝑚𝑔
1 2
𝑘
由对称性可知小球A运动到最高点时,弹簧伸长量为𝑚𝑔,C正确;
𝑘
D.由上述分析可知,小球A运动到最低点时,弹簧伸长量为3𝑚𝑔,D错误。
𝑘
故选BC。
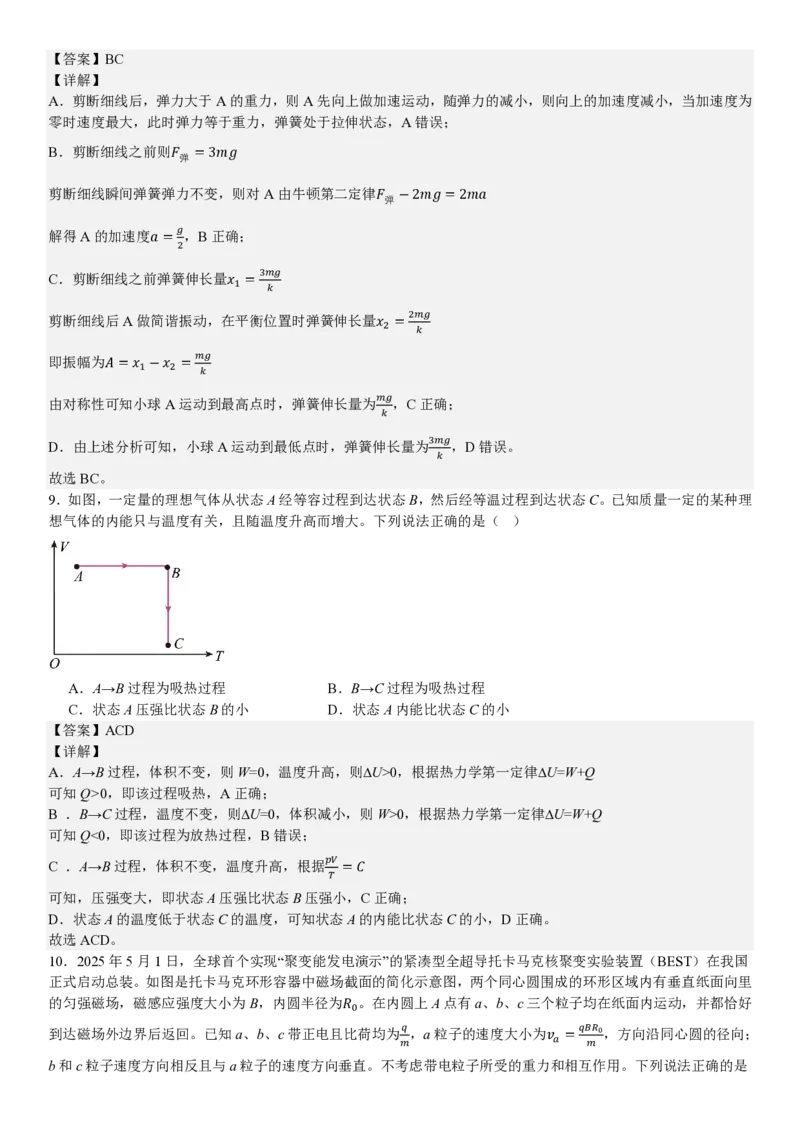
9.如图,一定量的理想气体从状态A经等容过程到达状态B,然后经等温过程到达状态C。已知质量一定的某种理
想气体的内能只与温度有关,且随温度升高而增大。下列说法正确的是( )
A.A→B过程为吸热过程 B.B→C过程为吸热过程
C.状态A压强比状态B的小 D.状态A内能比状态C的小
【答案】ACD
【详解】
A.A→B过程,体积不变,则W=0,温度升高,则∆U>0,根据热力学第一定律∆U=W+Q
可知Q>0,即该过程吸热,A正确;
B .B→C过程,温度不变,则∆U=0,体积减小,则W>0,根据热力学第一定律∆U=W+Q
可知Q<0,即该过程为放热过程,B错误;
C
.A→B过程,体积不变,温度升高,根据𝑝𝑉
=𝐶
𝑇
可知,压强变大,即状态A压强比状态B压强小,C正确;
D.状态A的温度低于状态C的温度,可知状态A的内能比状态C的小,D正确。
故选ACD。
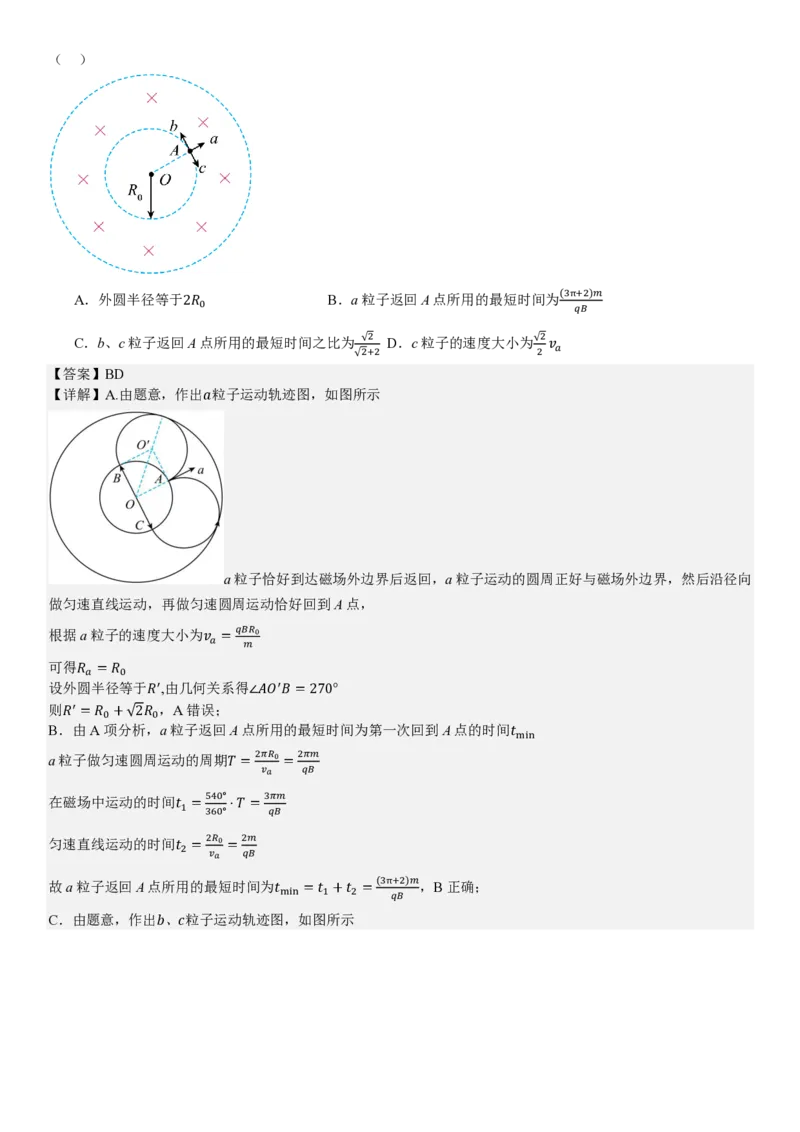
10.2025年5月1日,全球首个实现“聚变能发电演示”的紧凑型全超导托卡马克核聚变实验装置(BEST)在我国
正式启动总装。如图是托卡马克环形容器中磁场截面的简化示意图,两个同心圆围成的环形区域内有垂直纸面向里
的匀强磁场,磁感应强度大小为B,内圆半径为𝑅 。在内圆上A点有a、b、c三个粒子均在纸面内运动,并都恰好
0
到达磁场外边界后返回。已知a、b、c带正电且比荷均为𝑞,a粒子的速度大小为𝑣
=
𝑞𝐵𝑅0,方向沿同心圆的径向;
𝑎
𝑚 𝑚
b和c粒子速度方向相反且与a粒子的速度方向垂直。不考虑带电粒子所受的重力和相互作用。下列说法正确的是( )
A.外圆半径等于2𝑅 B.a粒子返回A点所用的最短时间为(3π+2)𝑚
0
𝑞𝐵
C.b、c粒子返回A点所用的最短时间之比为 √2 D.c粒子的速度大小为√2 𝑣
𝑎
√2+2 2
【答案】BD
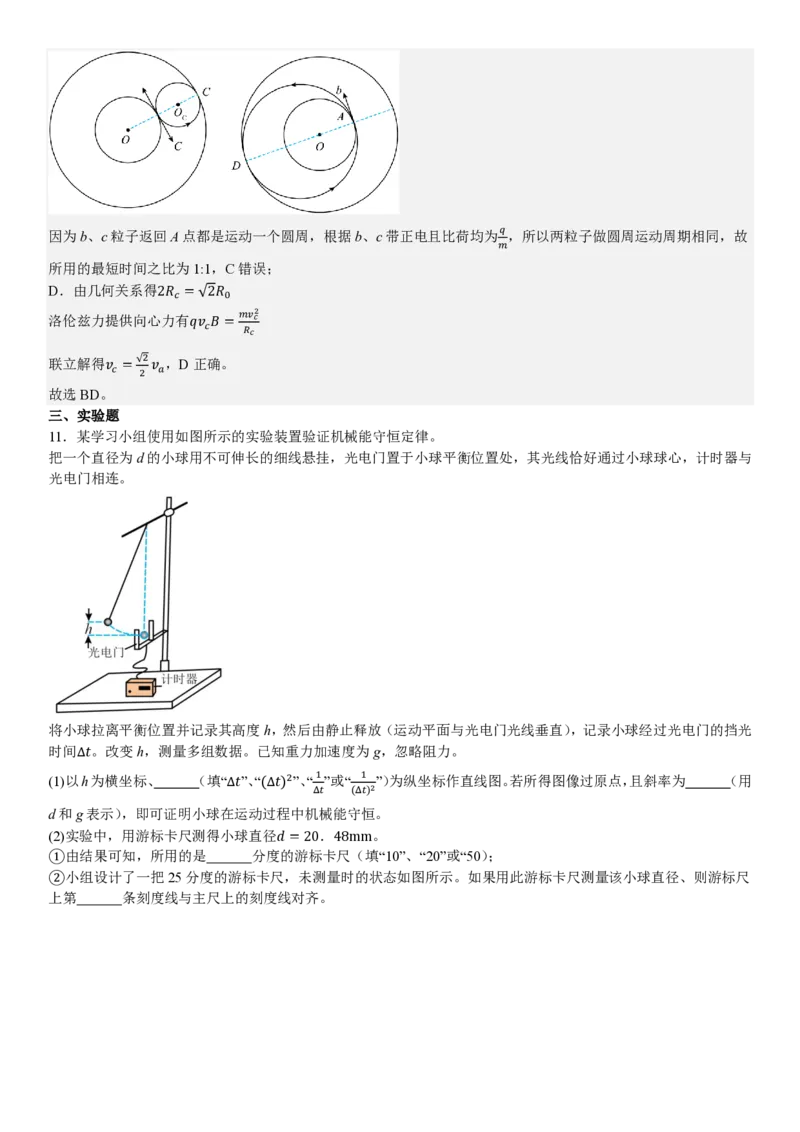
【详解】A.由题意,作出𝑎粒子运动轨迹图,如图所示
a粒子恰好到达磁场外边界后返回,a粒子运动的圆周正好与磁场外边界,然后沿径向
做匀速直线运动,再做匀速圆周运动恰好回到A点,
根据a粒子的速度大小为𝑣 = 𝑞𝐵𝑅0
𝑎
𝑚
可得𝑅 =𝑅
𝑎 0
设外圆半径等于𝑅′,由几何关系得∠𝐴𝑂′𝐵 =270°
则𝑅′ =𝑅 +√2𝑅 ,A错误;
0 0
B.由A项分析,a粒子返回A点所用的最短时间为第一次回到A点的时间𝑡
min
a粒子做匀速圆周运动的周期𝑇 = 2𝜋𝑅0 = 2𝜋𝑚
𝑣𝑎 𝑞𝐵
在磁场中运动的时间𝑡 = 540° ⋅𝑇 = 3𝜋𝑚
1
360° 𝑞𝐵
匀速直线运动的时间𝑡 = 2𝑅0 = 2𝑚
2
𝑣𝑎 𝑞𝐵
故a粒子返回A点所用的最短时间为𝑡 =𝑡 +𝑡 = (3π+2)𝑚,B正确;
min 1 2
𝑞𝐵
C.由题意,作出𝑏、𝑐粒子运动轨迹图,如图所示因为b、c粒子返回A点都是运动一个圆周,根据b、c带正电且比荷均为𝑞,所以两粒子做圆周运动周期相同,故
𝑚
所用的最短时间之比为1:1,C错误;
D.由几何关系得2𝑅 =√2𝑅
𝑐 0
洛伦兹力提供向心力有𝑞𝑣 𝐵 = 𝑚𝑣𝑐 2
𝑐
𝑅𝑐
联立解得𝑣 = √2 𝑣 ,D正确。
𝑐 𝑎
2
故选BD。
三、实验题
11.某学习小组使用如图所示的实验装置验证机械能守恒定律。
把一个直径为d的小球用不可伸长的细线悬挂,光电门置于小球平衡位置处,其光线恰好通过小球球心,计时器与
光电门相连。
将小球拉离平衡位置并记录其高度h,然后由静止释放(运动平面与光电门光线垂直),记录小球经过光电门的挡光
时间Δ𝑡。改变h,测量多组数据。已知重力加速度为g,忽略阻力。
(1)以h为横坐标、 ( 填“Δ𝑡”、“(Δ𝑡)2”、“ 1 ”或“ 1 ”)为纵坐标作直线图。若所得图像过原点,且斜率为 ( 用
Δ𝑡 (Δ𝑡)2
d和g表示),即可证明小球在运动过程中机械能守恒。
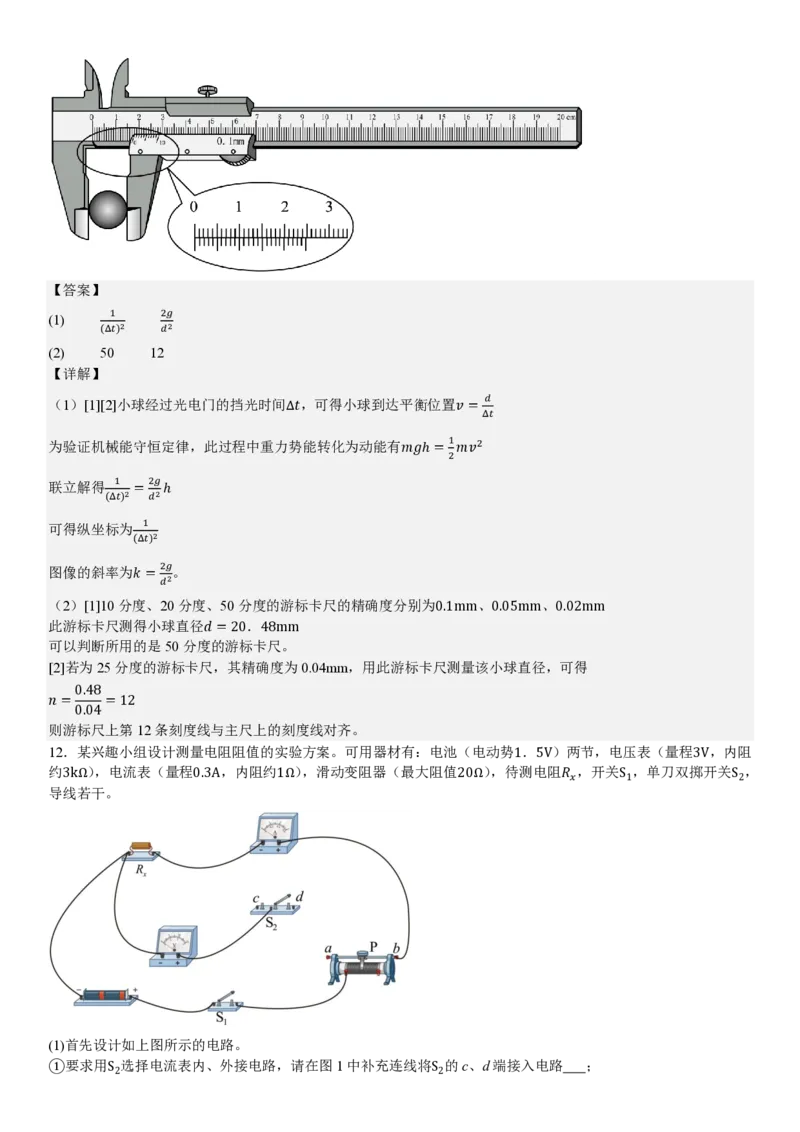
(2)实验中,用游标卡尺测得小球直径𝑑 =20.48mm。
①由结果可知,所用的是 分度的游标卡尺(填“10”、“20”或“50);
②小组设计了一把25分度的游标卡尺,未测量时的状态如图所示。如果用此游标卡尺测量该小球直径、则游标尺
上第 条刻度线与主尺上的刻度线对齐。【答案】
1 2𝑔
(1)
(Δ𝑡)2 𝑑2
(2) 50 12
【详解】
(1)[1][2]小球经过光电门的挡光时间Δ𝑡,可得小球到达平衡位置𝑣 = 𝑑
Δ𝑡
为验证机械能守恒定律,此过程中重力势能转化为动能有𝑚𝑔ℎ = 1 𝑚𝑣2
2
联立解得 1 = 2𝑔 ℎ
(Δ𝑡)2 𝑑2
可得纵坐标为 1
(Δ𝑡)2
图像的斜率为𝑘 = 2𝑔。
𝑑2
(2)[1]10分度、20分度、50分度的游标卡尺的精确度分别为0.1mm、0.05mm、0.02mm
此游标卡尺测得小球直径𝑑 =20.48mm
可以判断所用的是50分度的游标卡尺。
[2]若为25分度的游标卡尺,其精确度为0.04mm,用此游标卡尺测量该小球直径,可得
0.48
𝑛 = =12
0.04
则游标尺上第12条刻度线与主尺上的刻度线对齐。
12.某兴趣小组设计测量电阻阻值的实验方案。可用器材有:电池(电动势1.5V)两节,电压表(量程3V,内阻
约3kΩ),电流表(量程0.3A,内阻约1Ω),滑动变阻器(最大阻值20Ω),待测电阻𝑅 ,开关S ,单刀双掷开关S ,
𝑥 1 2
导线若干。
(1)首先设计如上图所示的电路。
①要求用S 选择电流表内、外接电路,请在图1中补充连线将S 的c、d端接入电路 ;
2 2②闭合S 前,滑动变阻器的滑片P应置于 端(填“a”或“b”);
1
③闭合S 后,将S 分别接c和d端,观察到这两种情况下电压表的示数有变化、电流表的示数基本不变,因此测量
1 2
电阻时S 应该接 端(填“c”或“d”)。
2
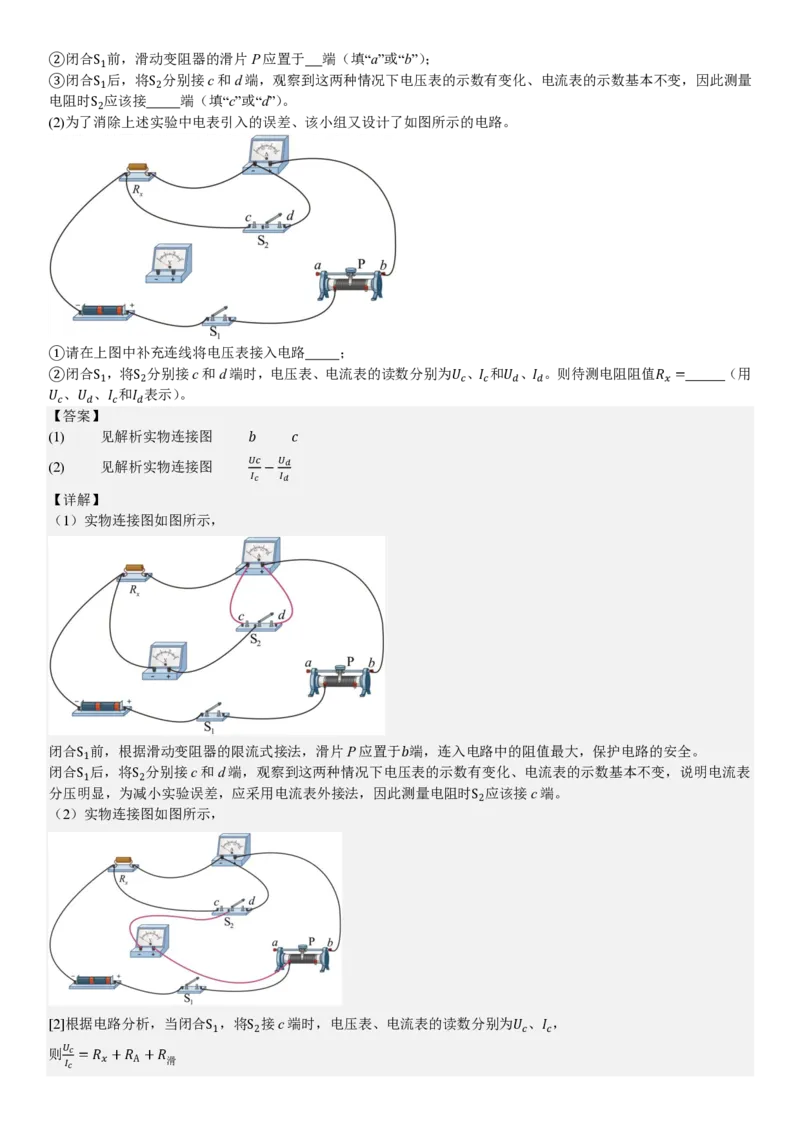
(2)为了消除上述实验中电表引入的误差、该小组又设计了如图所示的电路。
①请在上图中补充连线将电压表接入电路 ;
②闭合S ,将S 分别接c和d端时,电压表、电流表的读数分别为𝑈 、𝐼 和𝑈 、𝐼 。则待测电阻阻值𝑅 = (用
1 2 𝑐 𝑐 𝑑 𝑑 𝑥
𝑈 、𝑈 、𝐼 和𝐼 表示)。
𝑐 𝑑 𝑐 𝑑
【答案】
(1) 见解析实物连接图 𝑏 𝑐
(2) 见解析实物连接图 𝑈𝑐 − 𝑈𝑑
𝐼𝑐 𝐼𝑑
【详解】
(1)实物连接图如图所示,
闭合S 前,根据滑动变阻器的限流式接法,滑片P应置于𝑏端,连入电路中的阻值最大,保护电路的安全。
1
闭合S 后,将S 分别接c和d端,观察到这两种情况下电压表的示数有变化、电流表的示数基本不变,说明电流表
1 2
分压明显,为减小实验误差,应采用电流表外接法,因此测量电阻时S 应该接c端。
2
(2)实物连接图如图所示,
[2]根据电路分析,当闭合S ,将S 接c端时,电压表、电流表的读数分别为𝑈 、𝐼 ,
1 2 𝑐 𝑐
则𝑈𝑐
=𝑅 +𝑅 +𝑅
𝐼𝑐 𝑥 A 滑将S 接d端时,电压表、电流表的读数分别为𝑈 、𝐼 ,则𝑈𝑑 =𝑅 +𝑅
2 𝑑 𝑑 𝐼𝑑 A 滑
那么待测电阻阻值𝑅 = 𝑈𝑐− 𝑈𝑑。
𝑥
𝐼𝑐 𝐼𝑑
四、解答题
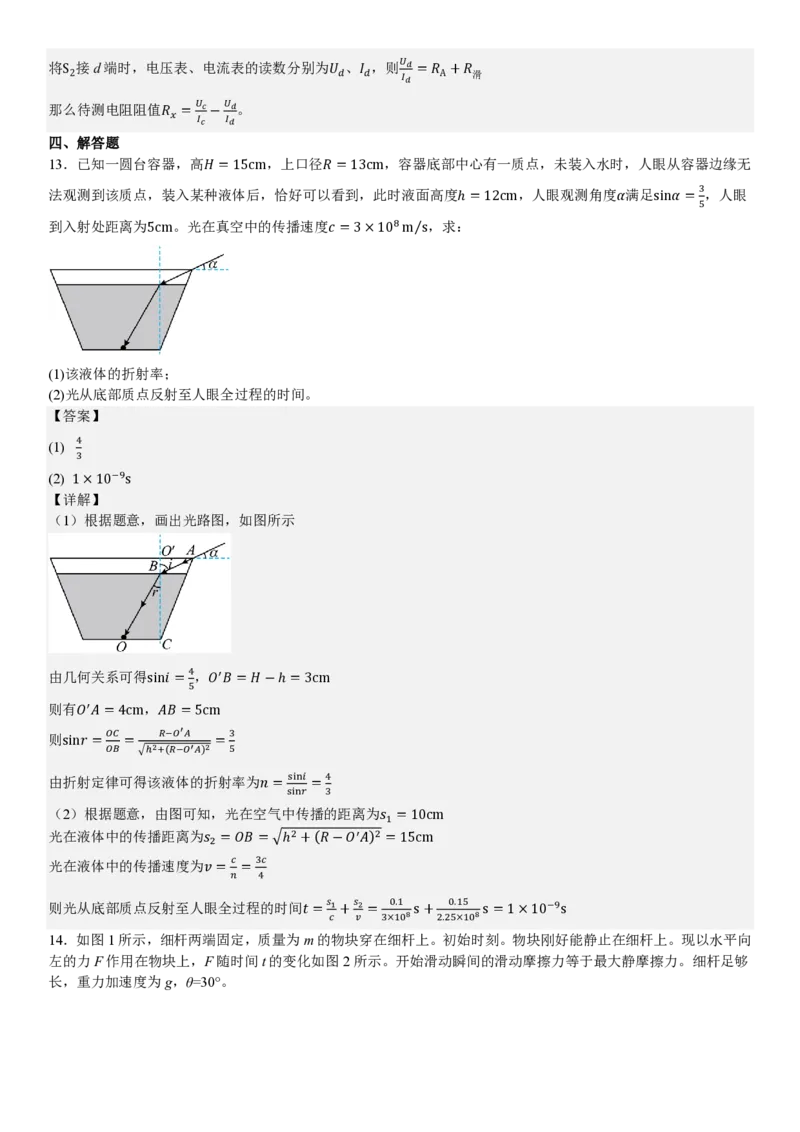
13.已知一圆台容器,高𝐻 =15cm,上口径𝑅 =13cm,容器底部中心有一质点,未装入水时,人眼从容器边缘无
法观测到该质点,装入某种液体后,恰好可以看到,此时液面高度ℎ =12cm,人眼观测角度𝛼满足sin𝛼 = 3,人眼
5
到入射处距离为5cm。光在真空中的传播速度𝑐 =3×108m⁄s,求:
(1)该液体的折射率;
(2)光从底部质点反射至人眼全过程的时间。
【答案】
4
(1)
3
(2) 1×10−9s
【详解】
(1)根据题意,画出光路图,如图所示
由几何关系可得sin𝑖 = 4,𝑂′𝐵 =𝐻−ℎ =3cm
5
则有𝑂′𝐴 =4cm,𝐴𝐵 =5cm
则sin𝑟 = 𝑂𝐶 = 𝑅−𝑂′𝐴 = 3
𝑂𝐵 √ℎ2+(𝑅−𝑂′𝐴)2 5
由折射定律可得该液体的折射率为𝑛 = sin𝑖 = 4
sin𝑟 3
(2)根据题意,由图可知,光在空气中传播的距离为𝑠 =10cm
1
光在液体中的传播距离为𝑠 =𝑂𝐵 =√ℎ2+(𝑅−𝑂′𝐴)2 =15cm
2
光在液体中的传播速度为𝑣 = 𝑐 = 3𝑐
𝑛 4
则光从底部质点反射至人眼全过程的时间𝑡 = 𝑠1+ 𝑠2 = 0.1 s+ 0.15 s=1×10−9s
𝑐 𝑣 3×108 2.25×108
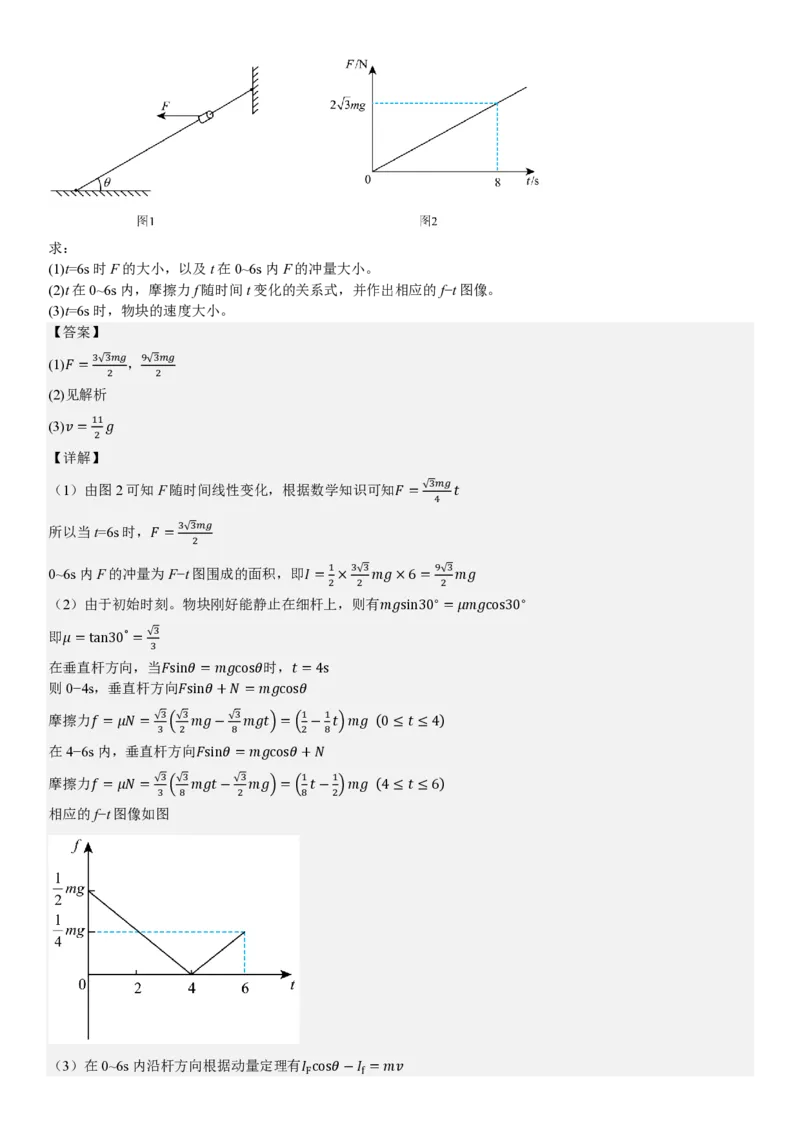
14.如图1所示,细杆两端固定,质量为m的物块穿在细杆上。初始时刻。物块刚好能静止在细杆上。现以水平向
左的力F作用在物块上,F随时间t的变化如图2所示。开始滑动瞬间的滑动摩擦力等于最大静摩擦力。细杆足够
长,重力加速度为g,θ=30°。求:
(1)t=6s时F的大小,以及t在0~6s内F的冲量大小。
(2)t在0~6s内,摩擦力f随时间t变化的关系式,并作出相应的f−t图像。
(3)t=6s时,物块的速度大小。
【答案】
(1)𝐹 =
3√3𝑚𝑔,9√3𝑚𝑔
2 2
(2)见解析
11
(3)𝑣 = 𝑔
2
【详解】
(1)由图2可知F随时间线性变化,根据数学知识可知𝐹 = √3𝑚𝑔 𝑡
4
所以当t=6s时,𝐹 = 3√3𝑚𝑔
2
0~6s内F的冲量为F−t图围成的面积,即𝐼 = 1 × 3√3 𝑚𝑔×6= 9√3 𝑚𝑔
2 2 2
(2)由于初始时刻。物块刚好能静止在细杆上,则有𝑚𝑔sin30∘ =𝜇𝑚𝑔cos30∘
即𝜇 =tan30° = √3
3
在垂直杆方向,当𝐹sin𝜃 =𝑚𝑔cos𝜃时,𝑡 =4s
则0−4s,垂直杆方向𝐹sin𝜃+𝑁 =𝑚𝑔cos𝜃
摩擦力𝑓 =𝜇𝑁 = √3 ( √3 𝑚𝑔− √3 𝑚𝑔𝑡)=( 1 − 1 𝑡)𝑚𝑔 (0≤𝑡 ≤4)
3 2 8 2 8
在4−6s内,垂直杆方向𝐹sin𝜃 =𝑚𝑔cos𝜃+𝑁
摩擦力𝑓 =𝜇𝑁 = √3 ( √3 𝑚𝑔𝑡− √3 𝑚𝑔)=( 1 𝑡− 1 )𝑚𝑔 (4≤𝑡 ≤6)
3 8 2 8 2
相应的f−t图像如图
(3)在0~6s内沿杆方向根据动量定理有𝐼 cos𝜃−𝐼 =𝑚𝑣
F f在0~6s内摩擦力的冲量为f−t图围成的面积,则𝐼 = 1 × 1 𝑚𝑔×4+ 1 × 1 𝑚𝑔×2= 5 𝑚𝑔
f
2 2 2 4 4
联立有9√3 𝑚𝑔⋅cos30∘− 5 𝑚𝑔 =𝑚𝑣
2 4
可得𝑣 = 11 𝑔
2
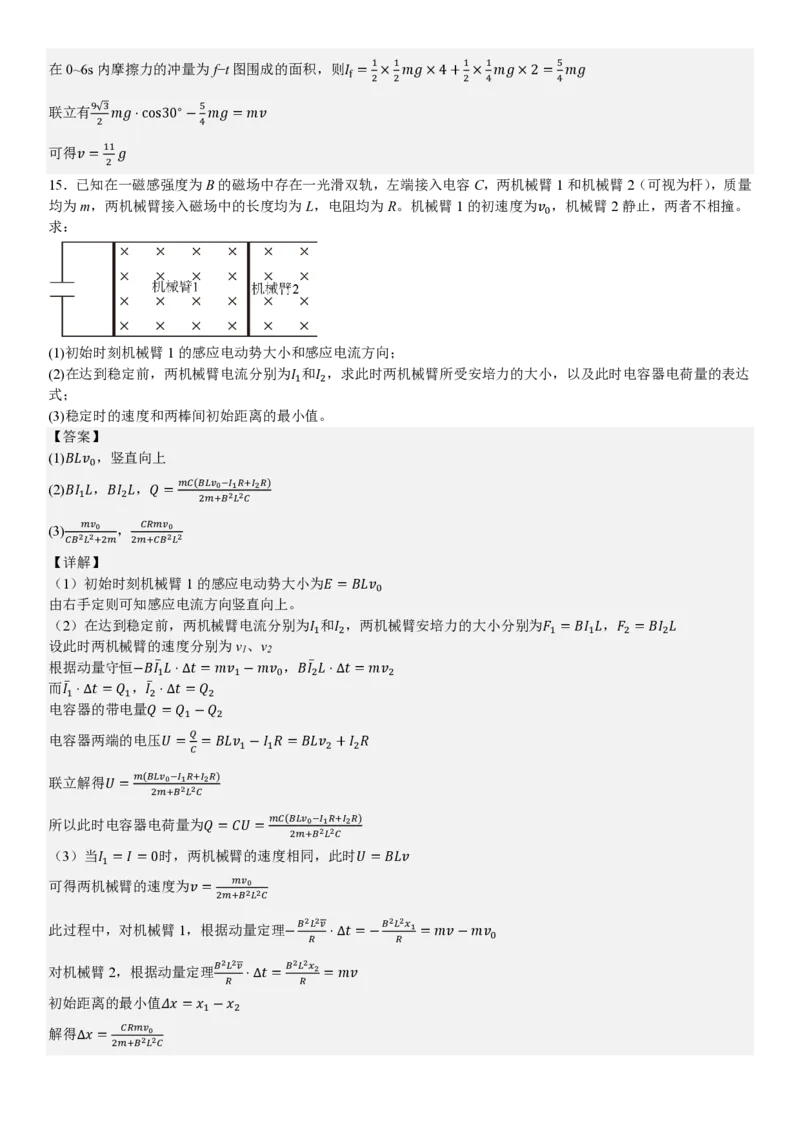
15.已知在一磁感强度为B的磁场中存在一光滑双轨,左端接入电容C,两机械臂1和机械臂2(可视为杆),质量
均为m,两机械臂接入磁场中的长度均为L,电阻均为R。机械臂1的初速度为𝑣 ,机械臂2静止,两者不相撞。
0
求:
(1)初始时刻机械臂1的感应电动势大小和感应电流方向;
(2)在达到稳定前,两机械臂电流分别为𝐼 和𝐼 ,求此时两机械臂所受安培力的大小,以及此时电容器电荷量的表达
1 2
式;
(3)稳定时的速度和两棒间初始距离的最小值。
【答案】
(1)𝐵𝐿𝑣 ,竖直向上
0
(2)𝐵𝐼 𝐿,𝐵𝐼 𝐿,𝑄 = 𝑚𝐶(𝐵𝐿𝑣0−𝐼1𝑅+𝐼2𝑅)
1 2 2𝑚+𝐵2𝐿2𝐶
(3) 𝑚𝑣0 , 𝐶𝑅𝑚𝑣0
𝐶𝐵2𝐿2+2𝑚 2𝑚+𝐶𝐵2𝐿2
【详解】
(1)初始时刻机械臂1的感应电动势大小为𝐸 =𝐵𝐿𝑣
0
由右手定则可知感应电流方向竖直向上。
(2)在达到稳定前,两机械臂电流分别为𝐼 和𝐼 ,两机械臂安培力的大小分别为𝐹 =𝐵𝐼 𝐿,𝐹 =𝐵𝐼 𝐿
1 2 1 1 2 2
设此时两机械臂的速度分别为v 、v
1 2
根据动量守恒−𝐵𝐼̅ 𝐿·Δ𝑡 =𝑚𝑣 −𝑚𝑣 ,𝐵𝐼̅ 𝐿·Δ𝑡 =𝑚𝑣
1 1 0 2 2
而𝐼̅ ·Δ𝑡 =𝑄 ,𝐼̅ ·Δ𝑡 =𝑄
1 1 2 2
电容器的带电量𝑄 =𝑄 −𝑄
1 2
电容器两端的电压𝑈 = 𝑄 =𝐵𝐿𝑣 −𝐼 𝑅 =𝐵𝐿𝑣 +𝐼 𝑅
1 1 2 2
𝐶
联立解得𝑈 = 𝑚(𝐵𝐿𝑣0−𝐼1𝑅+𝐼2𝑅)
2𝑚+𝐵2𝐿2𝐶
所以此时电容器电荷量为𝑄 =𝐶𝑈 = 𝑚𝐶(𝐵𝐿𝑣0−𝐼1𝑅+𝐼2𝑅)
2𝑚+𝐵2𝐿2𝐶
(3)当𝐼 =𝐼 =0时,两机械臂的速度相同,此时𝑈 =𝐵𝐿𝑣
1
可得两机械臂的速度为𝑣 = 𝑚𝑣0
2𝑚+𝐵2𝐿2𝐶
此过程中,对机械臂1,根据动量定理−
𝐵2𝐿2𝑣
·Δ𝑡 =−
𝐵2𝐿2𝑥1
=𝑚𝑣−𝑚𝑣
0
𝑅 𝑅
对机械臂2,根据动量定理𝐵2𝐿2𝑣
·Δ𝑡 =
𝐵2𝐿2𝑥2
=𝑚𝑣
𝑅 𝑅
初始距离的最小值𝛥𝑥 =𝑥 −𝑥
1 2
解得Δ𝑥 = 𝐶𝑅𝑚𝑣0
2𝑚+𝐵2𝐿2𝐶

